JP2015114113A - トルクセンサ及びそれを搭載した電動パワーステアリング装置 - Google Patents
トルクセンサ及びそれを搭載した電動パワーステアリング装置 Download PDFInfo
- Publication number
- JP2015114113A JP2015114113A JP2013254006A JP2013254006A JP2015114113A JP 2015114113 A JP2015114113 A JP 2015114113A JP 2013254006 A JP2013254006 A JP 2013254006A JP 2013254006 A JP2013254006 A JP 2013254006A JP 2015114113 A JP2015114113 A JP 2015114113A
- Authority
- JP
- Japan
- Prior art keywords
- circuit
- torque sensor
- pair
- voltage
- torque
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Granted
Links
Images



Landscapes
- Steering Control In Accordance With Driving Conditions (AREA)
- Power Steering Mechanism (AREA)
Abstract
Description
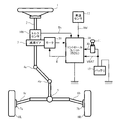
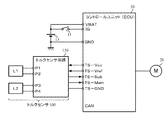
2 コラム軸(ステアリングシャフト、ハンドル軸)
12 車速センサ
13 バッテリ
20 モータ
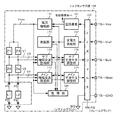
30 コントロールユニット(ECU)
31 電流指令値演算部
33 電流制限部
34 補償部
35 PI制御部
36 PWM制御部
37 インバータ回路
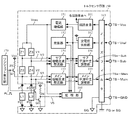
100 トルクセンサ
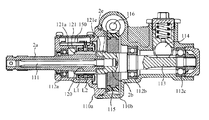
111 トーションバー
113 ピニオン軸
115 ウォームホイール
116 ウォーム
120 センサシャフト部
150 トルクセンサ回路(回路基板)
160 監視部
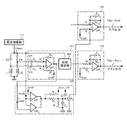
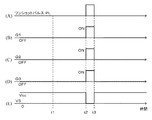
170 ワンショット発生部
171 コンパレータ
Claims (7)
- 回転軸に生じるトルクに応じて互いに逆方向にインピーダンスが変化する1対の検出コイルと、前記1対の検出コイルに直列接続されてブリッジ回路を形成する1対の抵抗を具備し、前記ブリッジ回路の電圧に基づいて前記トルクを検出するトルクセンサ回路とで構成され、
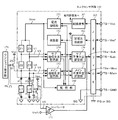
前記トルクセンサ回路に回路用電源電圧及び定電圧用基準電圧が供給され、前記トルクセンサ回路が、前記1対の検出コイルを励磁する励磁部と、前記励磁の電圧波形及び前記ブリッジ回路の電圧波形を比較し、前記1対の検出コイルの異常を検出する監視部とを具備しているトルクセンサにおいて、
前記トルクセンサ回路に前記回路用電源電圧及び定電圧用基準電圧が入力されるタイミングで処理を行う付加回路部と、初期診断時に前記1対の検出コイルの間の短絡を検出する監視回路部とを備えたことを特徴とするトルクセンサ。 - 前記付加回路部が、ワンショットパルスを発生するワンショットパルス発生部と、前記ワンショットパルスに基づいてON/OFF動作を行い、前記監視回路部に診断信号を入力するスイッチング部とで構成されている請求項1に記載のトルクセンサ。
- 前記トルクセンサ回路がメイン回路部及びサブ回路部で構成されており、前記監視回路部で前記短絡が検出されたときに、前記サブ回路部から短絡検出信号を出力する請求項1又は2に記載のトルクセンサ。
- 前記スイッチング部が、前記1対の検出コイルの間に接続され、前記ワンショットパルスを入力する1対のスイッチング素子と、前記1対のスイッチング素子の一方に接続された出力用スイッチング素子とで構成され、前記出力用スイッチング素子から前記診断信号を出力し、前記サブ回路部を介して前記短絡検出信号を生成するようになっている請求項2又は3に記載のトルクセンサ。
- 前記スイッチング部が、前記1対の検出コイルの間に接続され、前記ワンショットパルスを入力する1対のスイッチング素子と、前記1対のスイッチング素子の一方に接続された出力用スイッチング素子と、前記出力用スイッチング素子の出力信号及び基準電圧を比較して前記診断信号を生成するコンパレータとで構成され、前記コンパレータからの前記診断信号に基づき、前記サブ回路部を介して前記短絡検出信号を生成するようになっている請求項2又は3に記載のトルクセンサ。
- 前記1対のスイッチング素子及び前記出力用スイッチング素子がトランジスタである請求項4は5に記載のトルクセンサ。
- 請求項1乃至6に記載のトルクセンサを搭載していることを特徴とする電動パワーステアリング装置。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2013254006A JP6164073B2 (ja) | 2013-12-09 | 2013-12-09 | トルクセンサ及びそれを搭載した電動パワーステアリング装置 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2013254006A JP6164073B2 (ja) | 2013-12-09 | 2013-12-09 | トルクセンサ及びそれを搭載した電動パワーステアリング装置 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2015114113A true JP2015114113A (ja) | 2015-06-22 |
| JP6164073B2 JP6164073B2 (ja) | 2017-07-19 |
Family
ID=53528059
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2013254006A Expired - Fee Related JP6164073B2 (ja) | 2013-12-09 | 2013-12-09 | トルクセンサ及びそれを搭載した電動パワーステアリング装置 |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP6164073B2 (ja) |
Cited By (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2017103899A (ja) * | 2015-12-01 | 2017-06-08 | 日本精工株式会社 | モータ制御装置及びそれを備えた電動パワーステアリング装置 |
Citations (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2000111428A (ja) * | 1998-10-01 | 2000-04-21 | Nsk Ltd | トルクセンサ |
| JP2010184669A (ja) * | 2009-02-13 | 2010-08-26 | Nsk Ltd | 電動パワーステアリング装置の制御装置 |
| JP2012017026A (ja) * | 2010-07-08 | 2012-01-26 | Nsk Ltd | 電動パワーステアリング装置 |
-
2013
- 2013-12-09 JP JP2013254006A patent/JP6164073B2/ja not_active Expired - Fee Related
Patent Citations (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2000111428A (ja) * | 1998-10-01 | 2000-04-21 | Nsk Ltd | トルクセンサ |
| US6386052B1 (en) * | 1998-10-01 | 2002-05-14 | Nsk Ltd. | Torque sensor |
| JP2010184669A (ja) * | 2009-02-13 | 2010-08-26 | Nsk Ltd | 電動パワーステアリング装置の制御装置 |
| JP2012017026A (ja) * | 2010-07-08 | 2012-01-26 | Nsk Ltd | 電動パワーステアリング装置 |
Cited By (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2017103899A (ja) * | 2015-12-01 | 2017-06-08 | 日本精工株式会社 | モータ制御装置及びそれを備えた電動パワーステアリング装置 |
Also Published As
| Publication number | Publication date |
|---|---|
| JP6164073B2 (ja) | 2017-07-19 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| US6386052B1 (en) | Torque sensor | |
| US11084523B2 (en) | Vehicle-mounted device actuator and power steering device | |
| JP6179646B2 (ja) | 車両用舵角検出装置及びそれを搭載した電動パワーステアリング装置 | |
| CN103080715B (zh) | 扭矩检测装置 | |
| US8204647B2 (en) | Electric power steering system | |
| JP6237565B2 (ja) | 回転電機制御装置、および、これを用いた電動パワーステアリング装置 | |
| CN104136899A (zh) | 相对角检测装置和电动转向装置 | |
| US10530282B2 (en) | Current capability limiting of DC machines | |
| US9669812B2 (en) | Electric power steering system | |
| JP2009073446A (ja) | 電動パワーステアリング装置 | |
| JP2010184669A (ja) | 電動パワーステアリング装置の制御装置 | |
| JP6164073B2 (ja) | トルクセンサ及びそれを搭載した電動パワーステアリング装置 | |
| JP2005147733A (ja) | 異常検出装置、異常検出方法、車両用操舵装置 | |
| JP2006267045A (ja) | トルクセンサ | |
| JP2012111335A (ja) | 電動パワーステアリング装置、故障検出装置および故障検出方法 | |
| JP5455515B2 (ja) | 電動パワーステアリング装置、電動パワーステアリング装置の制御方法およびプログラム | |
| JP5018577B2 (ja) | 電動パワーステアリング装置 | |
| JP5265410B2 (ja) | 電動パワーステアリング装置とその制御方法およびプログラム | |
| JP5266913B2 (ja) | 電動パワーステアリング装置の制御装置 | |
| JP2012112778A (ja) | 故障検出装置、故障検出方法および電動パワーステアリング装置 | |
| JP2857903B2 (ja) | 電動式パワーステアリング装置 | |
| JP2012017026A (ja) | 電動パワーステアリング装置 | |
| JP6582935B2 (ja) | モータ制御装置及びこれを備えた電動パワーステアリング装置 | |
| JP2012173009A (ja) | トルクセンサ及びこれを備えた電動パワーステアリング装置 | |
| JP2014153097A (ja) | 角度センサ、トルクセンサおよびパワーステアリング装置 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20160711 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20170421 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20170509 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20170511 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20170523 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20170605 |
|
| R150 | Certificate of patent or registration of utility model |
Ref document number: 6164073 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 |
|
| LAPS | Cancellation because of no payment of annual fees |