以下、図面を参照しながら本発明を実施するための形態を、複数の形態について説明する。各実施形態で先行する実施形態で説明している事項に対応している部分には同一の参照符を付すか、または先行の参照符号に一文字追加し、重複する説明を略する場合がある。また各実施形態にて構成の一部を説明している場合、構成の他の部分は、先行して説明している実施形態と同様とする。各実施形態で具体的に説明している部分の組合せばかりではなく、特に組合せに支障が生じなければ、実施形態同士を部分的に組合せることも可能である。
(第1実施形態)
本発明の第1実施形態に関して、図1〜図12を用いて説明する。車両用空調装置10は、図1に示すように、室内エアコンユニット11を備えている。室内エアコンユニット11は、内気導入口12および外気導入口13を有する空調ケース14を備えている。内気導入口12は、車室内の空気(内気)を導入する。外気導入口13は、車室外の空気(外気)を導入する。空調ケース14は、各導入口12,13から導入した空気が通過し、車室内に向けて送風する空気通路を内部に形成する。空調ケース14には、各導入口12,13を選択的に開閉する内外気切替ドア15が設けられている。内外気切替ドア15には、リンク機構(図示せず)を介して第1直流モータ21が接続されている。したがって第1直流モータ(第1モータ)21は空気が流れる各導入口(第1通路)12,13を開閉する内外気切替ドア(第1ドア)15を駆動する。
空調ケース14内のうち各導入口12,13の空気下流側には、遠心式送風機16が設けられている。空調ケース14内のうち遠心式送風機16の空気下流側には、遠心式送風機16から吹き出される空気を冷却するエバポレータ17が設けられている。エバポレータ17は、コンプレッサなどとともに周知の冷凍サイクルを構成するもので、空調ケース14内を流れる空気を冷却する熱交換器である。エバポレータ17の空気下流側には、エバポレータ17からの冷風を加熱するヒータコア18が設けられている。ヒータコア18は、エンジン冷却水(温水)を熱源とする熱交換機であって、エバポレータ17からの冷風を加熱する。
空調ケース14内のうちエバポレータ17の空気下流側には仕切り板19が設けられている。仕切り板19は、空調ケース14内を運転席側通路34および助手席側通路35に仕切っている。運転席側通路34および助手席側通路35のうちヒータコア18の側方には、バイパス通路20がそれぞれ設けられている。バイパス通路20は、エバポレータ17からの冷風をヒータコア18に対してバイパスさせる。
運転席側通路34および助手席側通路35のヒータコア18の空気上流側には、エアミックスドア31a,31bがそれぞれ設けられている。エアミックスドア31a,31bは、その開度によって、運転席側通路34および助手席側通路35を流れる冷風のうちヒータコア18を流れる風量とバイパス通路20を流れる風量との比を調整する。
運転席側通路34および助手席側通路35のうちヒータコア18の下流側には、ヒータコア18からの温風とバイパス通路20からの冷風とを混合する運転席側混合室32および助手席側混合室33が設けられている。ヒータコア18からの温風とバイパス通路20からの冷風とが混合されることにより、運転席側混合室32および助手席側混合室33から車室内の運転席側および助手席側に吹き出される空気温度(すなわち、空調風の温度)が調整されることになる。
運転席側通路34のエアミックスドア31aには、リンク機構(図示せず)を介して第3直流モータ23が接続されている。運転席側通路34のエアミックスドア31aの開度は、第3直流モータ23によって調整される。また助手席側通路35のエアミックスドア31bには、リンク機構(図示せず)を介して第4直流モータ24が接続されている。助手席側通路35のエアミックスドア31bの開度は第4直流モータ24によって調整される。
空調ケース14の運転席側通路34のうちヒータコア18の空気下流側には、運転席側フェイス吹出口41、運転席側フット吹出口42、および運転席側デフロスタ吹出口43が設けられている。運転席側フェイス吹出口41は、運転席側混合室32からの空気を運転者上半身に向けて吹き出す。運転席側フット吹出口42は、運転席側混合室32から運転者の下半身に空気を吹き出す。運転席側デフロスタ吹出口43は、運転席側混合室32からフロントガラスの内表面のうち運転席側領域に空気を吹き出す。
空調ケース14のうち運転席側フェイス吹出口41の空気上流側には、運転席側フェイス吹出口41を開閉する運転席側フェイス吹出口切替ドア41aが設けられている。空調ケース14のうち運転席側フット吹出口42の空気上流側には、運転席側フット吹出口42を開閉する運転席側フット吹出口切替ドア42aが設けられている。空調ケース14のうち運転席側デフロスタ吹出口43の空気上流側には、運転席側デフロスタ吹出口43を開閉する運転席側デフロスタ吹出口切替ドア43aが設けられている。
同様に、助手席側においても、空調ケース14には、助手席側フェイス吹出口44、助手席側フット吹出口45、助手席側デフロスタ吹出口46が設けられている。空調ケース14には、助手席側フェイス吹出口44、助手席側フット吹出口45および助手席側デフロスタ吹出口46をそれぞれ開閉するための吹出口切替ドア44a〜46aが設けられている。
各吹出口切替ドア41a〜46aは、リンク機構(図示せず)を介して第2直流モータ22に接続されている。各吹出口切替ドア41a〜46aは、リンク機構を介する第2直流モータ22の駆動よりそれぞれ独立して開閉される。したがって第2直流モータ(第2モータ)22は空気が流れる各吹出口(第2通路)41〜46を開閉する各吹出口切替ドア(第2ドア)を駆動する。
次に、車両用空調装置10の電気的構成について説明する。車両用空調装置10は、図2に示すように、モータ制御装置60および電子制御装置(図1中A/CECUと記す)70を備える。モータ制御装置60は、空調装置用制御装置を構成するもので、第1直流モータ21、第2直流モータ22、第3直流モータ23、第4直流モータ24、第1ハーフブリッジ回路61、第2ハーフブリッジ回路62、第3ハーフブリッジ回路63、第4ハーフブリッジ回路64、第5ハーフブリッジ回路65、第6ハーフブリッジ回路66、制御部67、LINドライバ68およびレギュレータ69を備える。以下、第1ハーフブリッジ回路61〜第6ハーフブリッジ回路66を、それぞれ省略して第1回路61〜第6回路66ということがある。
第1回路61は、一対のスイッチング素子として、プラス端子側スイッチ素子であるハイサイドトランジスタ61aとマイナス端子側スイッチ素子であるローサイドトランジスタ61bを備える。ハイサイドトランジスタ61aおよびローサイドトランジスタ61bは、バッテリ25のプラス電極(図1中Vccと記す)とバッテリ25のマイナス電極(図中グランドの記号を示す)との間で直列接続されている。本実施形態では、ハイサイドトランジスタ61aおよびローサイドトランジスタ61bとして電界効果型トランジスタが用いられている。第2回路62〜第6回路66は、第1回路61と同様に、バッテリ25のプラス電極とバッテリ25のマイナス電極との間で直列接続されている一対のハイサイドトランジスタ62a〜66aおよびローサイドトランジスタ62b〜66bを備える。以下、ハイサイドトランジスタ61a〜66aを省略してハイトラ61a〜66aということがある。またローサイドトランジスタ61b〜66bを省略して、ロートラ61b〜66bということがある。
第1回路61のハイトラ61aとロートラ61bとは、第1共通接続点61cで接続される。第1共通接続点61cは、第1回路61においてハイトラ61aのソース端子とロートラ61bのドレイン端子とが接続されている部位である。同様に、第2回路62〜第6回路66のハイトラ62a〜66aとロートラ62b〜66bとは、第2共通接続点62c〜第6共通接続点66cでそれぞれ接続される。そして第1共通接続点61cと第2共通接続点62cとの間には、第1モータとしての第1直流モータ21が接続されている。第1回路61は、第2回路62とともに、後述するように、第1直流モータ21の回転方向の切り替えを実施する。
第2回路62の第2共通接続点62cと第3回路63の第3共通接続点63cとの間には、第2モータとしての第2直流モータ22が接続されている。第2回路62は、第3回路63とともに、後述するように、第2直流モータ22の回転方向の切り替えを実施する。
第4回路64〜第6回路66は、第1回路61〜第3回路63と同様に構成され、第1直流モータ21および第2直流モータ22に代わる第3直流モータ23および第4直流モータ24の回転方向の切り替えを実施する。
制御部67は、電子制御装置70から出力される制御信号に基づいて第1回路61〜第6回路66を制御するとともに、各モータ21〜24に対応したポテンショメータ21a〜24aの出力信号をLINドライバ68を介して電子制御装置70に出力する。
第1ポテンショメータ21aは、第1直流モータ21の回転軸の回転角度を検出するセンサである。第2ポテンショメータ22a〜第4ポテンショメータ24aは、それぞれ、対応する各モータ21〜24の回転軸の回転角度を検出するセンサである。第2ポテンショメータ22aは第2直流モータ22に対応し、第3ポテンショメータ23aは第3直流モータ23に対応し、第4ポテンショメータ24aは第4直流モータ24に対応している。
LINドライバ68は、車載LANを介して電子制御装置70との間で通信し、電子制御装置70と制御部67との間のインターフェイス回路を構成する。本実施形態の車載LANの通信プロトコルとしては、LIN(Local Interconnect Network)が用いられている。レギュレータ69は、制御部67等に電力供給するために、バッテリ25のプラス電極とマイナス電極との間の電圧に基づいて一定の電源電圧(例えば5V)を制御部67等に出力する。
電子制御装置70は、メモリおよびマイクロコンピュータなどから構成されている周知の制御装置である。電子制御装置70は、スイッチの出力信号、複数のセンサ(図示略)の出力信号、および第1〜第4ポテンショメータ21a〜24aの出力信号に基づいて、第1〜第4直流モータ21〜24を制御するための制御処理を実行する。複数のセンサは、たとえば車室外の空気温度を検出する外気温センサ、車室内の日射強度を検出する日射センサ、およびエンジン冷却水の温度を検出する温度センサである。
また車両用空調装置10は各部を操作するスイッチ(図示せず)を備える。スイッチは、たとえば車室内に吹き出される空気温度を自動的に制御する自動空調モードを設定するためのスイッチである。またスイッチは、たとえば吹出モードおよび独立温度コントロールモードを設定するためのスイッチである。独立温度コントロールモードは、運転席側吹出口41〜43からの吹き出し空気温度と助手席側吹出口44〜46からの吹き出し空気温度とをそれぞれ独立に制御するモードである。
次に、第1回路61〜第6回路66の作動について説明する。第1回路61〜第6回路66は、制御部67によって制御される。まず、制御部67が内気モードから外気モードへ切り替えるときの制御に関して説明する。内気モードは、内外気切替ドア15により外気導入口13を閉鎖し、内気導入口12を開口して車室内の空気を導入するモードである。外気モードは内外気切替ドア15により内気導入口12を閉鎖し、外気導入口13を開口して車室外の空気を導入するモードである。
この場合、制御部67が第1回路61のハイトラ61aをオンおよびロートラ61bをオフし、第2回路62のハイトラ62aをオフおよびロートラ62bをオンし、第3回路63のハイトラ63aおよびロートラ63bをオフする。これに伴い、バッテリ25のプラス電極とマイナス電極との間で、第1回路61のハイトラ61aから電流が図2中矢印Aのように第1直流モータ21を通して第2回路62のロートラ62bに流れる。このとき、第2直流モータ22が停止した状態で、第1直流モータ21の回転軸が一方向に回転する。回転軸の回転力はリンク機構を介して内外気切替ドア15に伝わり、内外気切替ドア15が回転して内気モードから外気モードに切り替わる。
次に、制御部67が外気モードから内気モードへ切り替えるときの制御に関して説明する。この場合、制御部67が第2回路62のハイトラ62aをオンおよびロートラ62bをオフし、第1回路61のハイトラ61aをオフおよびロートラ61bをオンし、第3回路63のハイトラ63aおよびロートラ63bをオフする。
これに伴い、バッテリ25のプラス電極とマイナス電極との間で、第2回路62のハイトラ62aから図2中矢印Bのように第1直流モータ21を通して第1回路61のロートラ61bに流れる。このとき、第1直流モータ21の回転軸の回転方向が逆向きになり回転軸が他方向に回転する。回転軸の回転力はリンク機構を介して内外気切替ドア15に伝わり、内外気切替ドア15が回転して外気モードから内気モードに切り替わる。
次に、吹出口モードの切り替えるときの制御に関して説明する。吹出口モードは、第2直流モータ22を制御することによって切り替わる。第2直流モータ22およびリンク機構は、第2直流モータ22の回転軸が一方向に回転する際に、フェイスモード→バイレベルモード→フットモード→フット/デフモード→デフモードの順に吹出口モードが切り替わる。また第2直流モータ22の回転軸が他方向に回転する際には、デフモード→フット/デフモード→フットモード→バイレベルモード→フェイスモードの順に吹出口モードが切り替わる。
なおフェイスモードは、フェイス吹出口41,44を開口し、フット吹出口42,45を閉鎖し、かつデフロスタ吹出口43,46を閉鎖するモードである。バイレベルモードは、フェイス吹出口41,44を開口し、フット吹出口42,45を開口し、かつデフロスタ吹出口43,46を閉鎖するモードである。フットモードは、フェイス吹出口41,44を閉鎖し、フット吹出口42,45を開口し、かつデフロスタ吹出口43,46を若干開口するモードである。フット/デフモードは、フェイス吹出口41,44を閉鎖し、フット吹出口42,45を開口し、かつデフロスタ吹出口43,46を開口するモードである。デフモードは、フェイス吹出口41,44を閉鎖し、フット吹出口42,45を閉鎖し、かつデフロスタ吹出口43,46を開口するモードである。
制御部67が第1回路61のハイトラ61aおよびロートラ61bをオフし、第3回路63のハイトラ63aをオンおよびロートラ63bをオフし、第2回路62のハイトラ62aをオフおよびロートラ62bをオンする。これに伴い、バッテリ25のプラス電極とマイナス電極との間で、第3回路63のハイトラ63aから電流が図2中矢印Dのように第2直流モータ22を通して第2回路62のロートラ62bに流れる。このとき、第1直流モータ21が停止した状態で、第2直流モータ22の回転軸が一方向に回転する。回転軸の回転力はリンク機構を介して吹出口切替ドア41a〜46aに伝わる。これに伴い、吹出口切替ドア41a〜46aが作動して正順に切り替えて、フェイスモード、バイレベルモード、フットモード、フット/デフモードおよびデフモードのうちいずれかの吹出口モードが実施される。
同様に、制御部67が第1回路61のハイトラ61aおよびロートラ61bをオフし、第2回路62のハイトラ62aをオンおよびロートラ62bをオフし、第3回路63のハイトラ63aをオフおよびロートラ63bをオンする。これに伴い、バッテリ25のプラス電極とマイナス電極との間で、第2回路62のハイトラ62aからの電流が図2中矢印Cのように第2直流モータ22を通過して第3回路63のロートラ63bに流れる。このとき、第2直流モータ22の回転軸の回転方向が逆向きになり回転軸が他方向に回転する。これに伴い吹出口切替ドア41a〜46aが作動して、吹出口モードが逆順で切り替わる。
次に、制御部67が内気モードから外気モードへ切り替え、同時に、吹出口モードを切替える制御に関して説明する。この場合、制御部67が、第1回路61のハイトラ61aをオンおよびロートラ61bをオフし、第2回路62のハイトラ62aをオフおよびロートラ62bをオンし、第3回路63のハイトラ63aをオンおよびロートラ63bをオフする。
これに伴い、バッテリ25のプラス電極とマイナス電極との間で、第1回路61のハイトラ61aからの電流が図2中矢印Aのように第1直流モータ21を通して第2回路62のロートラ62bに流れる。このため、第1直流モータ21がリンク機構を介して内外気切替ドア15を駆動し、外気モードに移行する。さらにバッテリ25のプラス電極とマイナス電極との間で、第3回路63のハイトラ63aからの電流が図2中矢印Dのように第2直流モータ22を通して第2回路62のロートラ62bに流れる。このため、第2直流モータ22がリンク機構を介して前述のように吹出口切替ドア41a〜46aを駆動し、正順に吹出モードを移行する。
次に、制御部67が外気モードから内気モードへ切り替え、同時に、吹出口モードを切替える制御に関して説明する。この場合、制御部67が第1回路61のハイトラ61aをオフおよびロートラ61bをオンし、第2回路62のハイトラ62aをオンおよびロートラ62bをオフし、第3回路63のハイトラ63aをオフおよびロートラ63bをオンする。
これに伴い、バッテリ25のプラス電極とマイナス電極との間で、第2回路62のハイトラ62aから電流が図2中矢印Bのように第1直流モータ21を通して第1回路61のロートラ61bに流れる。このため、第1直流モータ21がリンク機構を介して内外気切替ドア15を駆動し、内気モードへ移行する。さらにバッテリ25のプラス電極とマイナス電極との間で、第2回路62のハイトラ62aから電流が図2中矢印Cのように第2直流モータ22を通して第3回路63のロートラ63bに流れる。このため、第2直流モータ22がリンク機構を介して吹出口切替ドア41a〜46aを駆動し、逆順に吹出モードを移行する。
次に、エアミックスドア31a,31bの制御に関して説明する。エアミックスドア31a,31bは、マックスクール側からマックスホット側への動作と、その逆に、マックスホット側からマックスクール側への動作とがある。マックスクールの位置は、エアミックスドア31a,31bがヒータコア18の空気取り入れ口を全閉し、かつバイパス通路20を全開するときのエアミックスドア31a,31bの位置である。マックスホットの位置は、エアミックスドア31a,31bがヒータコア18の空気取り入れ口を全開し、かつバイパス通路20を全閉するときのエアミックスドア31a,31bの位置である。
第4回路64、第5回路65および第6回路66は、上述のように、第1回路61、第2回路62および第3回路63と同様に構成され、第1直流モータ21および第2直流モータ22に代わる第3直流モータ23および第4直流モータ24を駆動する。
まず、第3直流モータ23の制御に関して説明する。第3直流モータ23を制御することによって、運転席側通路34のエアミックスドア31aを制御する。制御部67が、前述のようにバッテリ25のプラス電極とマイナス電極との間で第3直流モータ23に電流を図2中矢印Aのように流すように第4回路64〜第6回路66を制御する。この場合、第4直流モータ24を停止した状態で、第3直流モータ23の回転軸が一方向に回転する。回転軸の回転力はリンク機構を介してエアミックスドア31aに伝わる。そして運転席側通路34のエアミックスドア31aがマックスクール側からマックスホット側に移行する。
また制御部67が、バッテリ25のプラス電極とマイナス電極との間で第3直流モータ23に対して電流を図2中矢印Bのように流すように第4回路64〜第6回路66を制御する。この場合、第4直流モータ24を停止した状態で、第3直流モータ23の回転軸が他方向に回転する。これに伴い、運転席側通路34のエアミックスドア31aがマックスホット側からマックスクール側に移行する。
次に、第4直流モータ24の制御に関して説明する。第4直流モータ24を制御することによって、助手席側通路35のエアミックスドア31bを制御する。制御部67が、バッテリ25のプラス電極とマイナス電極との間で第4直流モータ24に対して電流を図2中D方向に流すように第4回路64〜第6回路66を制御する。この場合、第3直流モータ23を停止した状態で、第4直流モータ24の回転軸が一方向に回転する。このため、助手席側通路35のエアミックスドア31bがマックスクール側からマックスホット側に移行する。
また制御部67が、バッテリ25のプラス電極とマイナス電極との間で第4直流モータ24に対して電流を図2矢印Cのように流すように第4回路64〜第6回路66を制御する。この場合、第3直流モータ23を停止した状態で、第4直流モータ24の回転軸が他方向に回転する。これに伴い、助手席側通路35のエアミックスドア31bがマックスホット側からマックスクール側に移行する。
次に、制御部67が各エアミックスドア31a,31bを同時にする場合に関して説明する。制御部67が、バッテリ25のプラス電極とマイナス電極との間で第3直流モータ23に対してA方向に電流を流し、かつ第4直流モータ24に対してD方向に電流を流すように第4回路64〜第6回路66を制御する。すると第3直流モータ23および第4直流モータ24が同時に一方向に回転して各エアミックスドア31a,31bを同時に回転させる。このため、各エアミックスドア31a,31bが同時にマックスクール側からマックスホット側に移行する。
また制御部67が、バッテリ25のプラス電極とマイナス電極との間で第3直流モータ23に対してB方向に電流を流し、かつ第4直流モータ24に対してC方向に電流を流すように第4回路64〜第6回路66を制御する。すると第3直流モータ23および第4直流モータ24が同時に他方向に各エアミックスドア31a,31bを回転させる。このため、各エアミックスドア31a,31bが同時にマックスホット側からマックスクール側に移行する。
次に、本実施形態の電子制御装置70の制御処理について説明する。まず、スイッチにより自動空調モードが設定されている場合には、電子制御装置70は、各吹出口41〜46から車室内に吹き出される空気温度を目標温度に近づける自動空調制御処理を実行する。自動空調制御処理の実行に際して、電子制御装置70は、第1直流モータ21〜第4直流モータ24を制御するための制御信号をLINドライバ68を介して制御部67に出力する。
これに伴い、制御部67は、第1回路61〜第3回路63を制御する。これによって第1直流モータ21が内外気切替ドア15を駆動し、第2直流モータ22が吹出口切替ドア41a〜46aを駆動する。このため、内外気切替ドア15によりいずれかの内外気モードが実施される。また吹出口切替ドア41a〜46aによりいずれかの吹出口モードが実施される。
また、スイッチによりデフロスタモードを設定された場合には、制御部67は、第1回路61〜第3回路63を制御することにより、第1直流モータ21および第2直流モータ22を同時に一方向に駆動させる。これに伴い、内外気切替ドア15により外気モードが実施され、吹出口切替ドア41a〜46aによりデフロスタモードが実施される。
その後、スイッチにより自動空調モードが設定された場合には、デフロスタモードが解除され、制御部67は、第1回路61〜第3回路63を制御して第1直流モータ21および第2直流モータ22を回転させる。このため、内外気切替ドア15により内気モードを実施し、かつ吹出口切替ドア41a〜46aにより、フェイスモード、バイレベルモード、フットモード、およびフット/デフモードのうちいずれかを実施する。
ここで、スイッチにより独立温度コントロールモードが設定されていない場合には、第4回路64〜第6回路66を制御して第3直流モータ23および第4直流モータ24を回転させる。このため、第3直流モータ23および第4直流モータ24がリンク機構を介して各エアミックスドア31a,31bを連動して回転させる。
その後、スイッチにより独立温度コントロールモードが設定された場合には、第4回路64〜第6回路66を制御して第3直流モータ23および第4直流モータ24を回転させる。このため、第3直流モータ23がリンク機構を介して運転席側通路34のエアミックスドア31aを回転させ、第4直流モータ24がリンク機構を介して助手席側通路35のエアミックスドア31bを回転させる。
次に、制御部67のさらに具体的な制御に関して図3〜図8を用いて説明する。制御部67は、制御手段であって、各回路61〜66のハイトラ61a〜66aおよびロートラ61b〜66bをパルス幅変調方式(PWM)で制御する。各回路61〜66の各素子61a〜66a,61b〜66bをPWM駆動することによって、第1直流モータ21〜第4直流モータ24までをPWM駆動することができる。そして各直流モータ21〜24は、最低作動電圧があり、供給される電圧がこの最低作動電圧以下になると動作が保証できない。換言すると、各直流モータ21〜24は、供給電圧が最低作動電圧以下になると、停止するおそれがある。
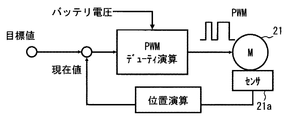
そこで制御部67は、図1に示すように、バッテリ25の電圧を取得する電圧取得手段として機能を有し、バッテリ電圧に応じて各回路61〜66を制御するためのデューティ比を決定する。以下、第1回路61〜第3回路63の制御と第4回路64〜第6回路66の制御は同様であるので、第1回路61〜第3回路63の制御を中心に説明する。
制御部67は、内外気切替ドア15または各吹出口切替ドア41a〜46aを所定の停止位置で停止するときには、停止位置に近づくにつれて、デューティ比が小さくなるように制御する。内外気切替ドア15の所定の停止位置は、たとえば内気導入口12を閉鎖する位置、および外気導入口13を閉鎖する位置である。また吹出口切替ドア41a〜46aの所定の停止位置は、各吹出モードに対応する位置である。このような位置に各ドアを配置する場合、停止位置に近づくと減速することによって、停止位置の位置決め精度の向上することができる。また各ドアの停止位置が空調ケース14に接触する位置である場合には、その停止時の接触による衝撃音などの騒音を低減することができる。
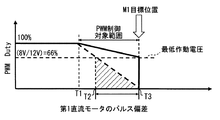
デューティ比は、図3に示す電圧指令マップによって決定される。電圧指令マップでは、偏差が小さくなるにつれて、減速するためにモータ駆動電圧を段階的に小さくしている。そして電圧指令マップでは、偏差が所定の下限値以下(図3では5以下)になると、モータ駆動電圧を最低作動電圧(図3では8V)未満にならないようにモータ駆動電圧が維持される。デューティ比は、図3に示す電圧指令マップによって決定されたモータ駆動電圧に基づいて決定される。
制御部67は、図4に示すように、目標値と現在値との偏差とバッテリ電圧と入力値として、図3に示す電圧指令マップを用いてPWMのためのデューティ比を決定する。そして決定したデューティ比を用いて各直流モータ21〜24を制御する。また各直流モータ21〜24に対応した各ポテンショメータ21a〜24aの出力信号から現在値を演算し、現在値をフィードバックする。
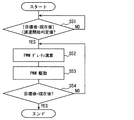
次に、制御部67の処理について図5を用いて説明する。図5に示す処理は、制御部67の電源投入状態において実行される。ステップS51では、目標値と現在値との差の絶対値(偏差)が減速開始判定値よりも小さいか否かを判断し、小さい場合にはステップS52に移り、小さくなるまでステップS51の処理を繰り返す。
ステップS52では、偏差が減速開始判定値よりも小さいので、PWM駆動するためのデューティ比を演算し、ステップS53に移る。デューティ比の演算は、予め制御部67のメモリに記憶されている電圧指令マップが用いられる。偏差が小さくなるにつれて、モータ駆動電圧が小さくなるように、デューティ比が決定される。そして電圧指令マップでは、偏差が所定の下限値以下(図3で5以下)になると、モータ駆動電圧を最低作動電圧(図3では8V)未満にならないようにモータ駆動電圧が維持される。
ステップS53では、デューティ比が決定されたので、決定されたデューティ比でPWM駆動し、ステップS54に移る。
ステップS54では、目標値と現在値が一致したか否かが判断され、一致した場合には本フローを終了し、一致していない場合には、ステップS52に戻る。これによって一致するまでステップS52およびステップS53の処理が繰り返されることになる。
このように制御部67は、偏差が減速開始判定値より小さくなると、PWM駆動を行って徐々に目標値に近づくように制御する。そして第1直流モータ21の最低作動電圧未満とならないように、デューティ比が決定されているので、第1直流モータ21の動作が不安定になることを防ぎつつ、停止精度の向上および騒音防止を達成することができる。
次に、第1直流モータ21の挙動に関して図6を用いて説明する。第1直流モータ21の偏差が減速開始判定値よりも小さくなる時刻t1からPWM駆動をする(図6参照)。そして最低作動電圧以上で徐々にデューティ比を小さくして、時刻t2にて目標値に到達する。時刻t2にて第1回路61のハイトラ61aおよびロートラ61bをオフにすることによって、第1直流モータ21は停止する。
デューティ比の変化は、バッテリ電圧によって異なり、バッテリ電圧が大きいとデューティ比は大きく変化し、バッテリ電圧が小さいとデューティ比は小さく変化する。たとえばバッテリ電圧が16Vの場合は、デューティ比の最低値は50%となり、バッテリ電圧が10Vのときはデューティ比の最低値は80%となり、バッテリ電圧が12Vのときはデューティ比の最低値は66%となる。
次に、第1直流モータ21と第2直流モータ22とが同時に動作させる場合の各モータの挙動に関して図7〜図12を用いて説明する。各モータ21,22を同時に駆動する場合の電流の流れは、図7および図8のパターンがある。以下、図7に示す電流による各モータ21,22の駆動パターンを、Aパターンといい、図8に示す電流による各モータ21,22の駆動パターンをBパターンという。Aパターンは、前述のように内気モードから外気モードへ切り替え、同時に、吹出口モードを正順に切替える場合の駆動パターンである。またBパターンは、前述のように外気モードから内気モードへ切り替え、同時に、吹出口モードを逆順に切替える場合の駆動パターンである。
制御部67は、制御を容易にするため初期設定(デフォルト)としてハイトラ61a〜66aまたはロートラ61b〜66bのいずれかをPWM制御するように構成されている。そして制御部67は、必要に応じていずれか一方のスイッチ素子のPWM制御から、いずれか他方のスイッチ素子をPWM制御するように切り換える。
まず第1実施例として、デフォルトとしてロートラ61b〜66bをPWM制御する場合に関して図9を用いて説明する。図9に示すフローチャートは、制御部67の電源投入状態において実行される。
ステップS91では、制御部67は各第1回路61〜第3回路63の各素子のオンオフ状態から駆動パターンがAパターンであるか否かを判断し、Aパターンである場合には、ステップS92に移り、Aパターンでない場合には、ステップS93に移る。
ステップS92では、駆動パターンがAパターンであるので、PWM制御する素子をハイトラ61a〜66aに切替えて、本フローを終了する。ステップS93では、駆動パターンがAパターンでないので、PWM制御する素子をデフォルトのままロートラ61b〜66bにて維持し、本フローを終了する。
駆動パターンがAパターンの場合には、ロートラ61b〜66bをデフォルトのままPWM制御すると、第2回路62が共用されているので各モータ21,22を同時に同じデューティ比にてPWM制御することになる。これによって個別に各モータ21,22を制御することができない。したがって駆動パターンがAパターンの場合には、図7に示すように、たとえばハイトラ61aをPWM制御することによって、第1直流モータ21だけをPWM制御することができる。
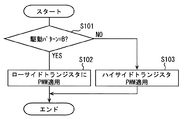
次に、第2実施例として、デフォルトとしてハイトラ61a〜66aをPWM制御する場合に関して図10を用いて説明する。図10に示すフローチャートは、制御部67の電源投入状態において実行される。
ステップS101では、制御部67は各第1回路61〜第3回路63の各素子のオンオフ状態から駆動パターンがBパターンであるか否かを判断し、Bパターンである場合には、ステップS102に移り、Bパターンでない場合には、ステップS103に移る。
ステップS102では、駆動パターンがBパターンであるので、PWM制御する素子をロートラ61b〜66bに切替えて、本フローを終了する。ステップS103では、駆動パターンがBパターンでないので、PWM制御する素子をデフォルトのままハイトラ61a〜66aにて維持し、本フローを終了する。
駆動パターンがBパターンの場合には、ハイトラ61a〜66aをデフォルトのままPWM制御すると、第2回路62が共用されているので各モータ21,22を同時に同じデューティ比にてPWM制御することになる。これによって個別に各モータ21,22を制御することができない。したがって駆動パターンがBパターンの場合には、図8に示すように、たとえばロートラ61bをPWM制御することによって、第1直流モータ21だけをPWM制御することができる。
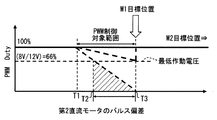
次に、図11および図12を用いて、各モータ21,22が同時に動作するときの挙動に関して説明する。図11に示すように、第1直流モータ21の目標位置は、第2直流モータ22の目標位置よりも近い。したがってまず、第1直流モータ21の目標位置に到達するように2つのモータ21,22を同時に駆動し、第1直流モータ21を目標位置に到達させた後、第1直流モータ21を停止する。その後、第2直流モータ22だけを駆動して、第2直流モータ22の目標位置に到達するように制御する。
この場合、第1直流モータ21の偏差が減速開始判定値よりも小さくなる時刻T1からPWM駆動をする(図11参照)。この場合、第1回路61を前述のようにPWM駆動するので、第2直流モータ22は駆動されずに減速しない。そして最低作動電圧以上で徐々にデューティ比を小さくして、時刻T3にて目標値に到達する。そして時刻T3にて第1回路61のハイトラ61aおよびロートラ61bをオフにすることによって、第1直流モータ21は停止する。その後、第2直流モータ22の目標位置と現在位置から離れているので、そのまま第2回路62を駆動する。
従来ように最低作動電圧にかかわらず、単に減速する制御であると、図7および図8にて破線で示したように、時刻T2にて最低作動電圧を下回り、斜線で示した時間の動作が不安定になる。しかし本実施形態の制御部67は、前述のように第1直流モータ21と第2直流モータ22の最低作動電圧以上となるようにデューティ比が制御されているので、2つのモータ21,22の動作が不安定になることを防止することができる。
また前述のように同時に動作させる場合には、第1回路61か第3回路63の素子を個別にPWM制御する。したがって一方のモータのPWM制御による影響が、他方のモータに影響することを抑制することができる。
以上説明したように本実施形態のモータ制御装置60の制御部67が第1回路61、第2回路62および第3回路63を制御して第1直流モータ21および第2直流モータ22を同時に回転させる際に、第2回路62を共用している。また制御部67が第4回路64、第5回路65および第6回路66を制御して第3直流モータ23および第4直流モータ24を同時に回転させる際に、第5回路65を共用している。このため、4つのモータを回転させるために、6つのハーフブリッジ回路を用いることになる。
1つの電動モータ毎に2つのハーフブリッジ回路(つまり、1つのフルブリッジ回路)を用いる場合には、4つの電動モータを回転させるために、8つのハーフブリッジ回路が必要になる。このため、本実施形態では、1つの電動モータ毎に2つのハーフブリッジ回路を用いる場合に比べて、ハーフブリッジ回路の使用個数を減らして、モータ制御装置60の回路構成を簡素化することができる。このため、モータ制御装置60のコストの低減を図ることができる。
また制御部67は、各モータ21,22が同時に駆動する場合であって、各モータ21,22に与えるべき駆動電流が互いに異なるときには、第1、第3回路61,63のうち少なくともいずれか一方の回路の各素子をパルス幅変調方式で個別に制御する。前述のように各モータ21,22を同時に駆動する場合には、共用されている第2回路62のスイッチ素子62a,62bのどちからがオンになっている状態にある。このように共用されている第2回路62のスイッチ素子62a,62bのデューティ比を制御すると、両方のモータ21,22が同じデューティ比で制御されることになるので個別の制御ができない。そこで本実施形態では、前述のように第2回路62ではなく、第1、第3回路61,63のうちいずれか一方の各スイッチ素子61a,61b,63a,63bをパルス幅変調方式で個別に制御する。これによって同時に各モータ21,22が動作している場合であっても、各モータ21,22に与えられる駆動電流を個別に制御することができる。したがって一方のモータを停止するために、他方のモータを停止する必要がないので、各モータの停止回数を減らすことができる。これによって制御部67は、各モータ21,22を安定して動作させることができる。
また制御部67は、取得した電圧に応じてデューティ比を変化させることができる。これによってバッテリ25の電圧の大小によってモータの動作が異なることを防ぐことができる。たとえば取得された電圧が所定値よりも低ければ、デューティ比を大きくして各モータを動作させるための電圧を確保することができる。また、たとえば取得された電圧が所定値よりも高ければ、デューティ比を小さくして各モータが設定以上に高速で動作することを防ぐことができる。したがってデューティ比を制御することによって、各モータを安定して動作させることができる。
また本実施形態では、制御部67は、第1直流モータ21および第2直流モータ22の少なくともいずれか一方が駆動中におけるデューティ比の最小値を、各直流モータ21,22が動作する最低電圧に相当するデューティ比以上となるように設定する。このようにバッテリ電圧を考慮した電圧指令に基づきPWMデューティを決定することで、各モータ21,22の最低作動電圧を下回ることが無くなり、目標値前でモータ21,22が停止することを防ぐことができる。
さらに本実施形態では、制御部67は、内外気切替ドア15または吹出口切替ドア41a〜46aを所定の停止位置で停止するときには、停止位置に近づくにつれて、デューティ比が小さくなるように制御する。これによって停止位置に近づくにつれて、各ドアを減速することができる。したがって各ドアの停止位置の位置決め精度の向上することができる。また各ドアの停止位置が空調ケース14に接触する位置である場合には、その停止時の接触による衝撃音などの騒音を低減することができる。
このように本実施形態の制御部67は、バッテリ電圧を制御に用いて最低動作電圧相当のPWMデューティを下回らないようにPWM制御を行うことで、減速による効果と動作の安定化の効果を達成することができる。
またPWM制御の適用をハイトラ61a〜66a、ロートラ61b〜66bと切り替えることで、制御対象のモータのみを減速し、対となる他方のモータへ影響を与えず、制御の独立性を高めることができる。
(その他の実施形態)
以上、本発明の好ましい実施形態について説明したが、本発明は上述した実施形態に何ら制限されることなく、本発明の主旨を逸脱しない範囲において種々変形して実施することが可能である。
上記実施形態の構造は、あくまで例示であって、本発明の範囲はこれらの記載の範囲に限定されるものではない。本発明の範囲は、特許請求の範囲の記載によって示され、さらに特許請求の範囲の記載と均等の意味及び範囲内での全ての変更を含むものである。
前述の第1実施形態では、バッテリ電圧に応じてデューティ比を変更しているが、このような制御に限るものではない。たとえば、バッテリ電圧にかかわらず動作が安定しているモータの場合には、最低作動電圧を考慮することなくデューティ比を0%まで小さくしてもよい。
前述の第1実施形態では、バッテリ電圧値は、バッテリ25から直接取得しているがバッテリ25から直接取得する構成に限るものではない。たとえば、制御部67は、電子制御装置70からLIN通信でバッテリ電圧値を取得してもよい。また制御部67は、センサ信号からモータ駆動速度を算出して、モータ駆動速度に基づいてバッテリ電圧値を算出してもよい。
前述の第1実施形態では、電圧指令マップは1つであったが、1つに限るものではない。たとえば電子制御装置70でバッテリ電圧を監視し、バッテリ電圧に応じて電圧指令マップを適宜変更してもよい。
前述の第1実施形態では、第1ドアおよび第2ドアとして、エアミックスドア31a,31bとを用いる例、および内外気切替ドア15と吹出口切替ドア41a〜46aとを用いる例を示したが、これに限るものではない。運転席側通路34のエアミックスドア31aおよび助手席側通路35のエアミックスドア31b以外の2つのエアミックスドアを用いた車両用空調装置10において、2つのエアミックスドアを第1、第2のドアとしてもよい。
具体的には、空調ケース14内にてヒータコア18の上側に上側エアミックスドアを配置し、ヒータコア18の下側に下側エアミックスドアを配置して、各エアミックスドアを独立に駆動可能に構成された車両用空調装置10に適用してもよい。この場合、たとえば上側エアミックスドアを第1ドアとして、下側エアミックスドアを第2ドアとする。上側エアミックスドアは、例えば車室内前席側を空調するために用いられ、下側エアミックスドアは、例えば、車室内後席側を空調するために用いられる。
また車室内の運転席側の吹出口切替ドア41a〜46aを駆動する第1モータと助手席側の吹出口切替ドア41a〜46aを駆動する第2モータとを備える車両用空調装置10に適用してもよい。この場合、たとえば運転席側の吹出口切替ドア41a〜43aを第1ドアとして、助手席側の吹出口切替ドア44a〜46aを第2ドアとする。
さらに車室内の前席側を空調するための前席用吹出口切替ドアを駆動する第1モータと車室内の後席側を空調するための後席用吹出口切替ドアを駆動する第2モータとを備える室内エアコンユニット11に適用してもよい。この場合、前席用吹出口切替ドアを第1ドアとして、後席用吹出口切替ドアを第2ドアとする。
また前述の第1実施形態では、第1直流モータ21と第2直流モータ22の回転軸が同時に一方向に回転したときに、内気モードから外気モードに内外気モードが移行し、フェイスモードから順次、デフモードに吹出口モードが切り替わるようにした例を示した。しかしこれに限らず、第1直流モータ21と第2直流モータ22の回転軸が同時に一方向に回転したときに、外気モードから内気モードに移行し、フェイスモードから順次、デフモードの順に吹出口モードが切り替わるようにしてもよい。
前述の第1実施形態では、空調装置として車両用空調装置10を用いた例を示したが、車両用に限るものではなく、住宅用空調装置、事務所用空調装置等の設置用空調装置を用いてもよい。また空調装置に限るものではなく、少なくとも2つのモータの駆動を制御するモータ制御装置であればよい。