JP2014190498A - 自動変速機の制御装置 - Google Patents
自動変速機の制御装置 Download PDFInfo
- Publication number
- JP2014190498A JP2014190498A JP2013068821A JP2013068821A JP2014190498A JP 2014190498 A JP2014190498 A JP 2014190498A JP 2013068821 A JP2013068821 A JP 2013068821A JP 2013068821 A JP2013068821 A JP 2013068821A JP 2014190498 A JP2014190498 A JP 2014190498A
- Authority
- JP
- Japan
- Prior art keywords
- shift
- downshift
- stage
- shift stage
- accelerator opening
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Pending
Links
Images










Landscapes
- Control Of Transmission Device (AREA)
Abstract
【課題】キックダウンの応答性を向上させると共に、一旦ダウンシフトを開始した後の中止も可能とすることで不要なキックダウンを防止するようにした自動変速機の制御装置を提供する。
【解決手段】検出アクセル開度と車速の単位時間当たりの変化量ΔAPとΔVを算出し、算出された変化量で合成されるベクトルからなる変速予測値SPを算出し、算出値がダウンシフト線を超えると共に、検出アクセル開度APがアップシフト線を超えるとき、現変速段GAからダウンシフトされる変速段を行先変速段GBとしてダウンシフトを開始させ(S10からS22)、それから所定時間経過前に検出アクセル開度APがダウンシフト線を超えたか否か判定し(S24)、超えたと判定されるときは行先変速段GBにダウンシフトさせる一方(S26)、超えたと判定されないときはダウンシフトを中止させる(S28からS34)。
【選択図】図3
【解決手段】検出アクセル開度と車速の単位時間当たりの変化量ΔAPとΔVを算出し、算出された変化量で合成されるベクトルからなる変速予測値SPを算出し、算出値がダウンシフト線を超えると共に、検出アクセル開度APがアップシフト線を超えるとき、現変速段GAからダウンシフトされる変速段を行先変速段GBとしてダウンシフトを開始させ(S10からS22)、それから所定時間経過前に検出アクセル開度APがダウンシフト線を超えたか否か判定し(S24)、超えたと判定されるときは行先変速段GBにダウンシフトさせる一方(S26)、超えたと判定されないときはダウンシフトを中止させる(S28からS34)。
【選択図】図3
Description
この発明は自動変速機の制御装置に関し、より具体的にはキックダウンの応答性を向上させるようにした自動変速機の制御装置に関する。
車両に搭載された動力源に接続される入力軸と駆動輪に接続される出力軸との間に油圧を給排されて作動する摩擦係合要素を介して確立可能なギヤ群からなる複数の変速段を備えると共に、スロットル開度(あるいはアクセル開度)と車速とから変速マップを検索して得られる変速段に変速する自動変速機の制御装置は良く知られており、その一例として特許文献1記載の技術を挙げることができる。
特許文献1記載の技術にあっては、スロットル開度と車速とから検索される第1の変速マップに加え、スロットル開度の変化速度と車速の変化速度から検索される第2の変速マップを備え、スロットル開度と車速とから第1の変速マップを検索して得られる変速段がアップシフト線/ダウンシフト線を超えるとき、変速が必要と判断してスロットル開度の変化速度と車速の変化速度とから第2の変速マップを検索して変速の要否を最終的に判定し、よって動力性能の向上に伴って変速段が多段化するときも、頻繁な変速を回避するように構成している。
特許文献1記載の技術は、上記のように構成することで頻繁な変速、いわゆるシフトビジーを回避することを意図しているが、2つの変速マップを検索して変速の要否を判定するため、ダウンシフト、特にキックダウンの応答性が低下すると共に、一旦ダウンシフトを開始した後は中止できないために不要なキックダウンを招く憾みがあった。
この発明の目的は上記した課題を解決し、キックダウンの応答性を向上させると共に、一旦ダウンシフトを開始した後の中止も可能とすることで不要なキックダウンを防止するようにした自動変速機の制御装置を提供することにある。
上記した課題を解決するために、請求項1にあっては、車両に搭載された動力源に接続される入力軸と駆動輪に接続される出力軸との間に油圧を給排されて作動する摩擦係合要素を介して確立可能なギヤ群からなる複数の変速段を備える自動変速機と、アクセル開度APと車速Vを検出し、確立されている現変速段GAに対し、前記検出されたアクセル開度APと車速Vとから変速マップを検索して得られる変速段GBがダウンシフト線/アップシフト線を超えるとき、前記自動変速機の摩擦係合要素に油圧を給排して前記変速段GBにアップシフト/ダウンシフトさせる変速制御手段とを備えた自動変速機の制御装置において、前記検出されたアクセル開度の単位時間当たりの変化量ΔAPと前記検出された車速の単位時間当たりの変化量ΔVを算出する変化量算出手段と、前記算出されたアクセル開度の変化量ΔAPと車速の変化量ΔVとを有向線分として合成されるベクトルからなる変速予測値を算出する変速予測値算出手段と、前記算出された変速予測値が少なくとも前記現変速段GAより1段低速の変速段の前記ダウンシフト線を超えると共に、前記検出されたアクセル開度APが少なくとも前記現変速段GAの前記アップシフト線をダウンシフト方向に超えるとき、前記現変速段GAから少なくとも1段ダウンシフトされる変速段を前記変速段GBとして前記変速段GBに向けてダウンシフトを開始させるダウンシフト開始手段と、前記ダウンシフトが開始されてから所定時間が経過するまでに前記検出されたアクセル開度APが前記ダウンシフト線を超えたか否か判定する予測後アクセル開度判定手段とを備えると共に、前記変速制御手段は、前記検出されたアクセル開度APが前記ダウンシフト線を超えたと判定されるときは前記変速段GBにダウンシフトさせる一方、前記検出されたアクセル開度APが前記ダウンシフト線を超えたと判定されないときは前記開始させたダウンシフトを中止させる如く構成した。
請求項2に係る自動変速機の制御装置にあっては、前記変速制御手段は、前記検出されたアクセル開度APが前記ダウンシフト線を超えたと判定されないときは前記開始させたダウンシフトを中止すると共に、所定の条件が成立する場合、前記現変速段GAを前記変速段GBとして前記変速段GBに変速する如く構成した。
請求項3に係る自動変速機の制御装置にあっては、前記変速制御手段は、前記変速予測値が前記現変速段GAよりも2段以上低速の前記変速段GBと予測され、予測後に前記検出されたアクセル開度APが前記変速段GBのアップシフト線をダウンシフト方向に超えたときに前記変速段GBへのダウンシフトを開始させ、前記ダウンシフトが開始されてから所定時間が経過したときに前記検出されたアクセル開度APが前記変速段GBよりも少なくとも1変速段高い変速段GCの前記ダウンシフト線を超えていたときには前記変速段GBを前記変速段GBよりも少なくとも1変速段高い前記変速段GCに変更する如く構成した。
請求項4に係る自動変速機の制御装置にあっては、前記所定の条件が成立する場合は、前記入力軸と出力軸の回転数比が規定範囲内にある場合である如く構成した。
請求項1に係る自動変速機の制御装置にあっては、検出されたアクセル開度と車速の単位時間当たりの変化量ΔAP,ΔVを算出し、それらを有向線分として合成されるベクトルからなる変速予測値を算出し、算出された変速予測値が少なくとも現変速段GAより1段低速の変速段のダウンシフト線を超えると共に、検出アクセル開度APが少なくとも現変速段GAのアップシフト線をダウンシフト方向に超えるとき、現変速段GAから少なくとも1段ダウンシフトされる変速段を行先変速段GBとして行先変速段GBに向けてダウンシフトを開始させ、ダウンシフトが開始されてから所定時間が経過するまでに検出アクセル開度APがダウンシフト線を超えたか否か判定すると共に、検出アクセル開度APがダウンシフト線を超えたと判定されるときは変速段GBにダウンシフトさせる一方、検出アクセル開度APがダウンシフト線を超えたと判定されないときは開始させたダウンシフトを中止させる如く構成したので、検出されたアクセル開度と車速の単位時間当たりの変化量ΔAP,ΔVを有向線分とするベクトルからなる変速予測値がダウンシフト線を超えるとき、ダウンシフトを開始させることで、キックダウンを含むダウンシフトを迅速に開始させることができてキックダウンの応答性を向上させることができる。また、ダウンシフトが開始されてから所定時間が経過するまでに検出アクセル開度APがダウンシフト線を超えたと判定されないときは開始させたダウンシフトを中止させる如く構成したので、不要なキックダウンを防止することができる。
請求項2に係る自動変速機の制御装置にあっては、検出アクセル開度APがダウンシフト線を超えたと判定されないときは開始させたダウンシフトを中止すると共に、所定の条件が成立する場合、現変速段GAを行先変速段GBとして行先変速段GBに変更する如く構成したので、上記した効果に加え、所定の条件を適宜設定することで運転者に与える変速ショックを緩和しつつ、運転者の意図に良く沿うことができる。
請求項3に係る自動変速機の制御装置にあっては、変速予測値が現変速段GAよりも2段以上低速の変速段GBと予測され、予測後に検出されたアクセル開度APが変速段GBのアップシフト線をダウンシフト方向に超えたときに変速段GBへのダウンシフトを開始させ、ダウンシフトが開始されてから所定時間が経過したときに検出されたアクセル開度APが変速段GBよりも少なくとも1変速段高い変速段GCのダウンシフト線を超えていたときには変速段GBを変速段GBよりも少なくとも1変速段高い変速段GCに変更する如く構成したので、上記した効果に加え、運転者の変速意図をより一層変速制御に反映させることができる。
請求項4に係る自動変速機の制御装置にあっては、所定の条件が成立する場合は、入力軸と出力軸の回転数比が規定範囲内にある場合である如く構成したので、上記した効果に加え、運転者に与える変速ショックを効果的に緩和することができる。
以下、添付図面を参照してこの発明に係る自動変速機の制御装置を実施するための形態について説明する。
図1は、この発明の実施例に係る自動変速機の制御装置を全体的に示す概略図である。
図1を参照して以下説明すると、符号10は自動変速機を示す。自動変速機10は前進6速、後進1速の変速段を有する平行軸型からなると共に、互いに平行に設けられた入力軸12、中間軸14、カウンタ軸16、アイドル軸20、出力軸22および後進アイドル軸24を備え、ディファレンシャル機構26と共に、変速機ケース10aの内部に収容される。
入力軸12はベアリングB1a,B1bによって回転可能に支持されると共に、エンジン(動力源。「EG」と示す)30のクランクシャフトCSにカプリング機構(例えばトルクコンバータからなる)CPを介して連結される。入力軸12の軸上にはエンジン30に近い側から順にメインドライブギヤGMV,4−6速ドライブギヤG46V,6速クラッチ(摩擦係合要素)CT6,3速クラッチ(摩擦係合要素)CT3,3速−RドライブギヤG3RVが取り付けられる。
メインドライブギヤGMVは入力軸12に相対回転不能に取り付けられる一方、4−6速ドライブギヤG46Vと3速−RドライブギヤG3RVは入力軸12に相対回転可能に取り付けられる。6速クラッチCT6は油圧を給排されるとき作動して4−6速ドライブギヤG46Vを入力軸12に締結し/あるいはそれから解放し、3速クラッチCT3も同様に油圧を給排されると作動して3速−RドライブギヤG3RVを入力軸12に締結し/あるいはそれから解放する。
中間軸14はベアリングB2a,B2bによって回転可能に支持され、その軸上にはエンジン30に近い側から順に1速クラッチ(摩擦係合要素)CT1,1速ドライブギヤG1V、連結ドリブンギヤGCN,5速ドライブギヤG5V,5速クラッチ(摩擦係合要素)CT5,2速クラッチ(摩擦係合要素)CT2,2速ドライブギヤG2Vが取り付けられる。
1速ドライブギヤG1Vと5速ドライブギヤG5Vと2速ドライブギヤG2Vは中間軸14に相対回転可能に取り付けられる一方、連結ドリブンギヤGCNは中間軸14に相対回転不能に取り付けられる。
1速クラッチCT1は油圧を給排されるとき作動して1速ドリブンギヤG1Vを中間軸14に締結し/あるいはそれから解放し、5速クラッチCT5も同様に油圧を給排されると作動して5速ドライブギヤG5Vを中間軸14に締結し/あるいはそれから解放する。2速クラッチCT2も油圧を給排されると作動して2速ドライブギヤG2Vを中間軸14に締結し/あるいはそれから解放する。
カウンタ軸16はベアリングB3a,B3bによって回転可能に支持され、その軸上にはエンジン30に近い側から順に4速クラッチ(摩擦係合要素)CT4、メインドリブンギヤGMN,4速ドライブギヤG4V、選択クラッチCTD、後進ドライブギヤGRVが取り付けられる。
メインドリブンギヤGMNと4速ドライブギヤG4Vと後進ドライブギヤGRVはカウンタ軸16に相対回転可能に取り付けられる。4速クラッチCT4は油圧を給排されるとき作動してメインドリブンギヤGMNをカウンタ軸16に締結し/あるいはそれから解放し、4速クラッチCT4も同様に油圧を給排されると作動してメインドリブンギヤGMNをカウンタ軸16に締結し/あるいはそれから解放する。
選択クラッチCTDは一体に形成されたセレクタSLに油圧を給排されると作動してカウンタ軸16を軸方向に移動可能に取り付けられ、そのドグ歯(図示せず)を4速ドライブギヤG4Vまたは後進ドライブギヤGRVの側面に係合させて4速ドライブギヤG4Vまたは後進ドライブギヤGRVをカウンタ軸16に締結し/あるいはそれから解放する。
アイドル軸20はベアリングB4a,B4bによって回転可能に支持されると共に、その軸上にはアイドルギヤGCCが設けられる。アイドルギヤGCCはアイドル軸20上に相対回転不能に取り付けられると共に、入力軸12に設けられたメインドライブギヤGMVと中間軸14上に設けられた連結従動ギヤGCNと常時噛合する。
出力軸22はベアリングB5a,B5bによって回転可能に支持され、その軸上にはエンジン30に近い側から順にディファレンシャルドライブギヤGFV,1速ドリブンギヤG1N,4−5−6速ドリブンギヤG456N,2−3速−RドリブンギヤG23RNが取り付けられる。
これらディファレンシャルドライブギヤGFVと1速ドリブンギヤG1Nと4−5−6速ドリブンギヤG456Nと2−3速−RドリブンギヤG23RNは全て出力軸22に相対回転不能に取り付けられる。
ディファレンシャルドライブギヤGFVはディファレンシャル機構26を駆動するディファレンシャルドリブンギヤGFNと常時噛合すると共に、1速ドリブンギヤG1Nは中間軸14上に設けられた1速ドライブギヤG1Vと常時噛合する。
また、4−5−6速ドリブンギヤG456Nは入力軸12上に取り付けられた4−6速ドライブギヤG46Vと中間軸14上に設けられた5速ドライブギヤG5Vと常時噛合すると共に、2−3速−RドリブンギヤG23RNは入力軸12に設けられた3−RドライブギヤG3RVと中間軸14上に設けられた2速ドライブギヤG2Vと常時噛合する。
後進アイドル軸24はベアリングB6a,B6bによって回転可能に支持され、その軸上には後進アイドルギヤGRIが相対回転不能に設けられる。後進アイドルギヤGRIは入力軸12上に設けられた3速−RドライブギヤG3RVとカウンタ軸16に設けられた後進ドライブギヤGRVと常時噛合する。
ディファレンシャル機構26は公知の差動機構26aを備え、出力軸22は差動機構26aからアクスルシャフトASL,ASRを介して左右の駆動輪WL,WRに接続される。
自動変速機10は車両(エンジン30や駆動輪WL,WRなどで示す)32に搭載される変速機であり、上記したように前進6速および後進1速の変速段を有する。エンジン30は例えばガソリンを燃料とする火花点火式の内燃機関からなる。
自動変速機10は油圧供給機構34とECU(電子制御ユニット)36を備える。図示は省略するが、油圧供給機構34はエンジン30で駆動される油圧(送油)ポンプを備え、油圧ポンプは変速機ケース10aの下部に形成されるオイルパン(リザーバ)から作動油を汲み上げて加圧して油圧をライン圧油路に吐出する。ライン圧油路はクラッチCT1などに接続される複数個の分岐油路に接続される。分岐油路のそれぞれには電磁弁が配置される。
ECU36はCPU,ROM,RAM,I/Oなどを有するマイクロコンピュータを備え、後述するセンサ群の出力に基づいて電磁弁を励磁・消磁し、上記したクラッチCT1などに油圧を供給してオン(係合)/あるいは油圧を排出させてオフ(解放)して前進6速・後進1速のいずれかを確立する。図2にそれらの変速段を確立するためのクラッチのオン・オフ動作を示す。
センサ群について説明すると、車両運転席床面に配置されたアクセルペダル(図示せず)はエンジン30の吸気管に配置されたスロットルバルブとの機械的な連結が断たれ、スロットルバルブをアクチュエータ(電動モータなど)で開閉するDBW(Drive By Wire)機構40が設けられる。
DBW機構40にはスロットル開度センサ42が設けられてアクチュエータの動作量からスロットルバルブの開度THを示す出力を生じると共に、アクセルペダルの付近にはアクセル開度センサ44が設けられてアクセル開度(アクセルペダルの踏み込み量)APに応じた出力を生じる。
また、エンジン30のクランクシャフトCSの付近にはクランク角センサ46が設けられてピストンのクランク角度からエンジン回転数NEを示す出力を生じると共に、吸気管においてスロットルバルブの下流には絶対圧センサ50が設けられて吸気管内絶対圧(エンジン負荷)PBAを示す出力を生じる。
さらに、自動変速機10の入力軸12の付近には第1回転数センサ52が配置され、自動変速機10の入力軸回転数(入力回転数)NMを示す信号を出力すると共に、出力軸20には第2回転数センサ54が配置され、自動変速機10の出力軸回転数(出力回転数)NCを示す信号を出力する。
またアクスルシャフトASL,ASRの付近には第3回転数センサ56が配置され、アクスルシャフトASL,ASRの回転数を示す出力を生じる。油圧供給機構34のリザーバには油温センサ60が配置され、作動油ATFの温度(油温TATF)を示す信号を出力すると共に、レンジセレクタ(図示せず)の付近にはセレクタ位置センサ62が配置され、運転者によって選択されたP,N,D,Rなどのレンジを示す出力を生じる。
これらセンサの出力はECU36に入力される。ECU36は第2回転数センサ54(あるいは第3回転数センサ56)の出力の時間間隔をカウントして車速Vを検出し、検出された車速Vと前記したアクセル開度APなどに基づき、自動変速機10の変速を制御する。
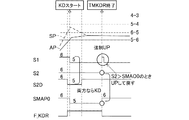
図3はこの実施例に係る自動変速機の制御装置の動作を示すフロー・チャート、図4は図3フロー・チャートで使用されるパラメータの算出処理を示すサブ・ルーチン・フロー・チャート、図5は図3の処理で使用される変速マップの特性などを示す説明図、図6から図11は図3の処理をケースごとに示すタイム・チャートである。図3のプログラムはECU36によって規定時間、例えば10msecごとに実行される。
図3フロー・チャートを参照して説明すると、S10においてフラグF_KDRのビットが0か否か判断する。このフラグのビットの初期値は0にリセットされていることからS10の判断は通例肯定されてS12に進み、パラメータS2DがパラメータS2より小さいか否か判断する。
図4(a)は図3フロー・チャートで使用されるS2D,S2などのパラメータの算出処理を示すサブ・ルーチン・フロー・チャートであるが、図4フロー・チャートの説明に入る前に、図5から図7を参照してこの実施例に係る制御を概説する。
この実施例にあっては、アクセル開度APと車速Vを検出し、現在(図3フロー・チャートの実行時刻)確立されている現変速段GAに対し、検出されたアクセル開度APと車速Vとから変速マップを検索して得られる行先変速段GBがダウンシフト線あるいはアップシフト線を超えるとき、その行先変速段GBにアップシフト/ダウンシフトさせる制御を前提とする。図5に変速マップを5速と6速を例にとって示す。
この実施例の特徴とするところは、検出されたアクセル開度APの単位時間当たりの変化量ΔAPと検出された車速Vの単位時間当たりの変化量ΔVとを有向線分として合成されるベクトルからなる変速予測値(「SP」と示す)を算出し、算出された変速予測値が現変速段GAから少なくとも1段低速の変速段のダウンシフトを規定するダウンシフト線を超えると共に、検出されたアクセル開度APが少なくとも現変速段GAのアップシフト線をダウンシフト方向に超えるとき、現変速段GAから少なくとも1段ダウンシフトされる変速段を行先変速段(変速すべき変速段)GBとして行先変速段GBに向けてダウンシフトを開始させるように構成したことである。
即ち、アクセル開度APなどの変化量を用いることで、行先変速段GBの挙動よりも早期に運転者のキックダウン意図を把握してダウンシフトを開始させるように構成した。
また、ダウンシフトが開始されてから所定時間(タイマTMKDRの値)が経過するまでに検出されたアクセル開度APがダウンシフト線を超えたか否か判定し、検出されたアクセル開度APがダウンシフト線を超えたと判定されるときは行先変速段GBにダウンシフトさせる一方、検出されたアクセル開度APがダウンシフト線を超えたと判定されないときは開始させたダウンシフトを中止させると共に、アップシフト線においてダウンシフト方向に超える前の変速段に変更する(強制的にアップシフトさせる)ように構成した。
これにより、キックダウンを含む不要なダウンシフトを防止することができると共に、運転者の意図に良く沿うことができる。
図5から図7を参照して図3フロー・チャートで使用されるパラメータを説明する。
S1:検出されたアクセル開度と車速Vから決定される変速マップにおけるアップシフト線に対する位置を変速段の数字で示すアップシフト判定用パラメータ
S2:検出されたアクセル開度と車速Vから決定される変速マップにおけるアップシフト線に対する位置を変速段の数字で示すダウンシフト判定用パラメータ
S2D:算出された変速予測値SPから決定される変速マップにおけるダウンシフト線に対する位置を変速段の数字で示す、運転者のダウンシフト意図を予測するパラメータ
SMAP0:S1とS2から決定される変速段を数字で示すパラメータ、変速前段では現変速段GAに、変速後段では行先変速段GBに相当するパラメータ
S1:検出されたアクセル開度と車速Vから決定される変速マップにおけるアップシフト線に対する位置を変速段の数字で示すアップシフト判定用パラメータ
S2:検出されたアクセル開度と車速Vから決定される変速マップにおけるアップシフト線に対する位置を変速段の数字で示すダウンシフト判定用パラメータ
S2D:算出された変速予測値SPから決定される変速マップにおけるダウンシフト線に対する位置を変速段の数字で示す、運転者のダウンシフト意図を予測するパラメータ
SMAP0:S1とS2から決定される変速段を数字で示すパラメータ、変速前段では現変速段GAに、変速後段では行先変速段GBに相当するパラメータ
図4フロー・チャートの説明に戻ると、S100で変速予測値SPを算出する。
図4(b)はその算出処理を示すサブ・ルーチン・フロー・チャートである。
以下説明すると、先ずS100aにおいて検出されたアクセル開度APと車速Vのデータをバッファに格納する処理を行い、S100bに進み、アクセル開度APと車速Vのデータがバッファに全て格納されたか否か判断する。「バッファ」はデータを一時保存するRAMの領域を意味する。
S100bで否定されたときは以降の処理をスキップする一方、肯定されるときはS100cに進み、図示の式に従い、バッファに格納されているアクセル開度APと車速Vのデータの今回値と所定回前の値の差を求めると共に、所定回に相当する所定時間で除算して平均値を求めることで検出されたアクセル開度APの単位時間当たりの変化量ΔAPと検出された車速Vの単位時間当たりの変化量ΔVを算出する。
次いで、S100dに進んでローパスフィルタ処理して算出値をなまし、S100eに進み、図5に示す如く、算出されたアクセル開度APの単位時間当たりの変化量ΔAPと検出された車速Vの単位時間当たりの変化量ΔVを有向成分として合成されるベクトルを求め、そのベクトルの頂点に相当する変速マップでの座標を変速予測値SPとすることで算出する。
図4(a)フロー・チャートの説明に戻ると、次いでS102に進み、上記したパラメータS1,S2,S2D,SMAP0を算出する。
パラメータS1,S2は、上記したように検出されたアクセル開度と車速Vとで図5に示すような変速マップを検索することで算出する。
パラメータS2Dは、算出された変速予測値SPで図5に示すような変速マップを検索し、変速予測値SPのベクトルの頂点に相当する変速マップの座標に相当する変速段をS2Dとすることで算出する。
また、パラメータSMAP0は、S1とS2が同じ変速段のとき、その変速段への変速を開始できるように変速段が変化し、S2=SMAP0で開始した変速を確定してダウンシフトが実行される。
即ち、ダウンシフトを確定させる条件であるS2=SMAP0はS1とS2が同じ変速段で成立し、S1とS2が異なればS2=SMAP0は成立せずにダウンシフトの中止が確定される。このように、パラメータSMAP0はS1に追従するように変化する。
尚、「キックダウン」(図7などで「KD」と示す)は、車速の変化量ΔVに比してアクセル開度の変化量ΔAPが大きいダウンシフトを意味するが、以下の説明においてKDとダウンシフトを同義で使用する。
図3フロー・チャートの説明に戻ると、S12においてパラメータS2DがS2より小さいか否か判断することは、変速予測値SPで変速マップを検索して得られる値S2Dがダウンシフト判定用パラメータより小さい、換言すれば、検出アクセル開度APと車速Vとから変速マップを検索して得られる行先変速段GBが現変速段GAからの少なくとも1段のダウンシフトを規定するダウンシフト線を超える前に、変速予測値SPに相当するパラメータS2Dがそのダウンシフト線を超えたか否か判断することに相当する。
図5に示す如く、変速予測値SPは単位時間当たりの変化量を有向成分として合成されるベクトルとして算出されることから、検出アクセル開度APと車速Vよりも変化速度が大きく、従ってこのパラメータを用いて変速マップを検索する方が、従来的な検出アクセル開度APと車速Vとから変速マップを検索して得られる値S1,S2(行先変速段GB)のみに依存するより、迅速に運転者の変速意図を察知することができる。
図3フロー・チャートにおいてS12の判断が否定されるときはS14に進み、前記したフラグのビットを0にリセット(あるいはリセットしたままに)して以降の処理をスキップする一方、肯定されるときはS16に進み、パラメータS2DがSMAP0より小さく、かつアップシフト判定用パラメータS1もSMAP0より小さいか否か判断する。
即ち、検出アクセル開度APと車速Vとから変速マップを検索して得られていた値SMAP0に対し、変速予測値SPから変速マップを検索して得られる値S2Dがダウンシフト線を超えると共に、検出アクセル開度APと車速Vから変速マップが現変速段GAからの少なくとも1段のアップシフトを規定するアップシフト線をダウンシフト方向に超えるか否か判断する。
S16で否定されるときはS14に進む一方、肯定されるときはS18に進み、前記したフラグのビットを1にセットし、S20に進み、タイマ(ダウンカウンタ)TMKDRに所定値#TMKDRをセットしてダウンカウント(時間計測)を開始する。
次いでS22に進み、パラメータS2Dの値をダウンシフト判定用パラメータS2の値とする。換言すれば、現変速段GAから少なくとも1段ダウンシフトされる変速段を行先変速段GBとして行先変速段GBに向けてダウンシフトを開始させる。
他方、S10で否定されるときはS24に進み、ダウンシフト判定用パラメータS2がSMAP0以下となったか否か判断する。
S24で肯定されるときは行先変速段GBにダウンシフトされたと判定される(あるいは後述するようにアップシフトされる)ことを意味することからS26に進み、前記したフラグのビットを0にリセットして処理を中止する。
S24で肯定されることは、検出されたアクセル開度APがダウンシフト線を超えたか否か判定し、検出されたアクセル開度APがダウンシフト線を超えたと判定されて行先変速段GBにダウンシフトされたと判定されることを意味することからS26に進み、前記したフラグのビットを0にリセットして処理を中止する。
一方、S24で否定されるときはS28に進み、タイマTMKDRの値が0か、換言すればダウンシフトが開始されてから所定時間(タイマTMKDRの値#TIMKDR)が経過したか否か判断する。
S28で否定されるときは所定時間が経過していないと共に、検出されたアクセル開度APが未だダウンシフト線を超えたと判定されないことを意味することからS22に進み、開始させたダウンシフトを続行する。
他方、S28で肯定されるときは、所定時間が経過したにも関わらず、検出されたアクセル開度APが未だダウンシフト線を超えたと判定されないことを意味することからS30以降に進み、所定の条件が成立するか否か判断する。
具体的には、S30で下限ギヤレシオGRKDRに所定値#GRKDRを設定し、S32に進み、検出されたギヤレシオGRATIOが所定値#GRKDR以上で、かつ上限ギヤレシオGREGAH未満か否か判断する。
ギヤレシオは第1回転数センサ52で検出される入力軸回転数を第2回転数センサ54で検出される出力軸回転数で除算したときの商(入力軸回転数に対する出力軸回転数の比。変速比)を意味する。
即ち、自動変速機10の入力軸12と出力軸22の回転数比が規定範囲内にあるか、換言すれば、変速の進行状況においてアップシフトすると変速ショックが悪化するような状況(例えばトルク相の後のイナーシャ相の初期を超えた状況)にないことを意味する所定の条件が成立するか否か判断する。
従って、S32の判断で使用される下限ギヤレシオGRKDRと上限ギヤレシオGREGAHは、そのような所定の条件が成立することを判別するに足る値を求めて設定する。
S32で肯定されるときはS34に進み、ダウンシフト判定用パメータS2をアップシフト判定用パラメータS1の値に置き換える。
換言すれば、検出されたアクセル開度APがダウンシフト線を超えたと判定されないときは開始させたダウンシフトを中止すると共に、(S32で所定の条件が成立することが確認された場合)現変速段GAから少なくとも1段アップシフトされる変速段を行先変速段GBとして行先変速段GBにアップシフトさせる。
他方、S32で否定される場合、即ち所定の条件が成立しないと判断されるときは変速の進行状況においてアップシフトすると変速ショックが悪化するような状況にあることからS26に進む。従って、この場合はS22の処理で開始させられたダウンシフトが中止されることなく、そのまま実現される。
図6から図11を参照して6速からのダウンシフトを例にとって図3フロー・チャートの処理を説明する。尚、図6から図11においては簡略化のため、車速Vとその変化量ΔVの図示を省略した。
図6に示すケースの場合、変速予測値SPが6−5ダウンシフト線をダウンシフト方向に超えるためにS2Dは5速に変更しているが、検出アクセル開度APは5−6アップシフト線をダウンシフト方向に超えていないので、S1,S2,SMAP0は6速のままで変更していない。
即ち、図3フロー・チャートにおいてS10,S12,S16,S14へと進む場合であり、変速予測値SPがダウンシフト線を超えず、検出されたアクセル開度APと車速Vがアップシフト線を超えないことから、ダウンシフト、即ち、現変速段GAから少なくとも1段ダウンシフトされる変速段を行先変速段GBとして変速段GBに向けてダウンシフト(キックダウン)が開始されることはない。
図7に示すケースの場合、それに対し、変速予測値SPが6−5ダウンシフト線をダウンシフト方向に超えた時点でS2Dは5速に変更されると共に、検出アクセル開度APが5−6アップシフト線をダウンシフト方向に超えたため、S1,SMAP0も5速に変更される。
即ち、変速予測値SPがダウンシフト線を超え、検出されたアクセル開度APもアップシフト線を超えることから、現変速段GAから少なくとも1段ダウンシフトされる変速段を行先変速段GBとして行先変速段GBに向けてダウンシフトが開始される。
しかしながら、検出されたアクセル開度APがダウンシフト線を超えたとは判定されないことから、開始させられたダウンシフトは中止されると共に、所定時刻TMKDRが経過した時点で、S1,SMAP0が6速に変更される。
即ち、現変速段GAから少なくとも1段アップシフトされる変速段を行先変速段GBとして、即ち、元の現変速段GAを行先変速段GBとしてそこに強制的にアップシフト(UP)される。図3フロー・チャートにおいてS10からS24,S28,S30,S32,S26へと進む場合である。
図8に示すケースの場合、変速予測値SPが6−5ダウンシフト線をダウンシフト方向に超えたので、S2Dは5速に変更されると共に、検出アクセル開度APが5−6アップシフト線を超えたので、S1,SMAP0は5速に変更され、5速に向けてダウンシフトが開始される。
次いで、検出されたアクセル開度APがダウンシフト線を超えたと判定された時点でS2も5速に変更され、その結果、S2=SMAP0となって5速へのダウンシフトが確定される。
図示のケースは図3フロー・チャートにおいてS10からS24,S26へと進む場合であり、所定時間(タイマTMKDR値)が終了する前に5速に成功裏にダウンシフトされる場合である。
図9に示すケースは図3フロー・チャートにおいてS10からS24,S28からS34へと進む場合であり、変速予測値SPが6−5ダウンシフト線をダウンシフト方向に超えて5速に向けてダウンシフトが開始された後、変速予測値SPが5−4ダウンシフト線をダウンシフト方向に超えたため、さらに4速に向けてダウンシフトが開始された場合である。
ただし、検出されたアクセル開度APが5−4線はおろか6―5線ダウンシフト線も超えたと判定されないため、図3フロー・チャートでS24,S28,S30,S32,S34を辿り、所定時間が終了した時点で元の6速にアップシフトされる場合である。
即ち、検出されたアクセル開度APがダウンシフト線を2段以上(より正確には2段)超えたと判定されることから、現変速段GAから少なくとも2段ダウンシフトされる変速段を行先変速段GBとして行先変速段GBに向けてダウンシフトを開始させる場合である。
他方、検出されたアクセル開度APがダウンシフト線を超えたと判定されないため、所定の条件が成立する場合、現変速段GAを行先変速段GBとして行先変速段GBに向けてアップシフトされる。
図10に示すケースは図3フロー・チャートにおいてS10からS24,S28からS34へと進む場合であり、図9に示すケースと同様、変速予測値SPが6−5ダウンシフト線をダウンシフト方向に超えて5速に向けてダウンシフトが開始された後、変速予測値SPが5−4ダウンシフト線をダウンシフト方向に超えたため、さらに4速に向けてダウンシフトが開始された場合である。
ただし、検出されたアクセル開度APが6−5ダウンシフト線は超えたが、5―4線ダウンシフト線は超えないため、図3フロー・チャートでS24,S28,S32,S34を辿り、所定時間が終了した時点で5速にアップシフトされる。
即ち、検出されたアクセル開度APがダウンシフト線を2段以上(より正確には2段)超えたと判定されることから、現変速段GAから少なくとも2段ダウンシフトされる変速段を行先変速段GBとして行先変速段GBに向けてダウンシフトが開始される。
他方、検出されたアクセル開度APがダウンシフト線を2段以上超えたと判定されないため、所定の条件が成立する場合、5速にシフトアップされる。即ち、検出されたアクセル開度APがダウンシフト線を2段以上超えたと判定されないため、所定の条件が成立する場合、現変速段GAから少なくとも1段ダウンシフトされる変速段を行先変速段GCとして行先変速段GCに向けてアップシフトされる。
図11に示すケースは図3フロー・チャートにおいてS10からS24,S26と進む場合であり、変速予測値SPが6−5ダウンシフト線をダウンシフト方向に超えて5速に向けてダウンシフトが開始された後、変速予測値SPが5−4ダウンシフト線をダウンシフト方向に超えたため、さらに4速に向けてダウンシフトが開始される。
さらに、検出されたアクセル開度APが6−5ダウンシフト線と5―4線ダウンシフト線とを超えたため、所定時間が終了した時点で4速にダウンシフトされる。
即ち、検出されたアクセル開度APがダウンシフト線を2段以上(より正確には2段)超えたと判定されることから、現変速段GAから少なくとも2段ダウンシフトされる変速段を行先変速段GBとして行先変速段GBに向けてダウンシフトが開始される。
さらに、検出されたアクセル開度APがダウンシフト線を2段以上(より正確には2段)超えたと判定されるため、現変速段GAから少なくとも2段ダウンシフトされる変速段を行先変速段GBとして行先変速段GBに成功裏にダウンシフトされる。
上記した如く、この実施例にあっては、車両32に搭載された動力源(エンジン)30に接続される入力軸12と駆動輪WL,WRに接続される出力軸22との間に油圧を給排されて作動する摩擦係合要素(n速クラッチCTn)を介して確立可能なギヤ群(メインドライブギヤGMVなど)からなる複数の(前進6速、後進1速の)変速段を備える自動変速機10と、アクセル開度APと車速Vを検出し、確立されている現変速段GAに対し、前記検出されたアクセル開度APと車速Vとから変速マップを検索して得られる変速段GBがダウンシフト線/アップシフト線を超えるとき、前記自動変速機の摩擦係合要素に油圧を給排して前記変速段GBにアップシフト/ダウンシフトさせる変速制御手段(ECU36)とを備えた自動変速機の制御装置において、前記検出されたアクセル開度の単位時間当たりの変化量ΔAPと前記検出された車速の単位時間当たりの変化量ΔVを算出する変化量算出手段(ECU36,S100)と、前記算出されたアクセル開度の変化量ΔAPと車速の変化量ΔVとを有向線分として合成されるベクトルからなる変速予測値SPを算出する変速予測値算出手段(ECU36)と、前記算出された変速予測値が少なくとも現変速段GAより1段低速の変速段の前記ダウンシフト線を超えると共に、前記検出されたアクセル開度APが少なくとも前記現変速段GAの前記アップシフト線をダウンシフト方向に超えるとき、前記現変速段GAから少なくとも1段ダウンシフトされる変速段を前記変速段GBとして前記変速段GBに向けてダウンシフトを開始させるダウンシフト開始手段(ECU36,S10からS22)と、前記ダウンシフトが開始されてから所定時間(TMKDR)が経過するまでに前記検出されたアクセル開度APが前記ダウンシフト線を超えたか否か判定する予測後アクセル開度判定手段(ECU36,S24)とを備えると共に、前記変速制御手段は、前記検出されたアクセル開度APが前記ダウンシフト線を超えたと判定されるときは前記変速段GBにダウンシフトさせる一方(ECU36,S26)、前記検出されたアクセル開度APが前記ダウンシフト線を超えたと判定されないときは前記開始させたダウンシフトを中止させる(ECU36,S28からS34)如く構成したので、検出されたアクセル開度と車速の単位時間当たりの変化量ΔAP,ΔVを有向線分とするベクトルからなる変速予測値がダウンシフト線を超えるとき、ダウンシフトを開始させることで、キックダウンを含むダウンシフトを迅速に開始させることができてキックダウンの応答性を向上させることができる。また、ダウンシフトが開始されてから所定時間が経過するまでに検出アクセル開度APがダウンシフト線を超えたと判定されないときは開始させたダウンシフトを中止させる如く構成したので、不要なキックダウンを防止することができる。
また、前記変速制御手段は、前記検出されたアクセル開度APが前記ダウンシフト線を超えたと判定されないときは前記開始させたダウンシフトを中止すると共に(ECU36,S24,S28)、所定の条件が成立する場合、前記現変速段GAを前記変速段GBとして前記変速段GBに変更する(S32,S34)如く構成したので、上記した効果に加え、所定の条件を適宜設定することで運転者に与える変速ショックを緩和しつつ、運転者の意図に良く沿うことができる。
また、前記変速制御手段は、図10に示す如く、前記変速予測値が前記現変速段GA(図示例では6速)よりも2段以上低速の前記変速段GB(図示例では4速)と予測され、予測後に前記検出されたアクセル開度APが前記変速段GBのアップシフト線をダウンシフト方向に超えたときに前記変速段GBへのダウンシフトを開始させ、前記ダウンシフトが開始されてから所定時間が経過したときに前記検出されたアクセル開度APが前記変速段GBよりも少なくとも1変速段高い変速段GC(図示例では5速)の前記ダウンシフト線を超えていたときには前記変速段GBを前記変速段GBよりも少なくとも1変速段高い前記変速段GCに変更する(ECU36,S24からS34)如く構成したので、上記した効果に加え、運転者の変速意図をより一層変速制御に反映させることができる。
また、前記所定の条件が成立する場合は、前記入力軸12と出力軸22の回転数比が規定範囲内にある場合である如く構成したので、上記した効果に加え、運転者に与える変速ショックを効果的に緩和することができる。
尚、上記において、有段式の自動変速機の例として平行軸方式の自動変速機を示したが、この発明はそれに限定されるものではなく、ツインクラッチ型の自動変速機であっても良い。
また、原動機としてガソリンを燃料とする火花点火式のエンジン(内燃機関)を示したが、この発明はそれに限定されるものではなく、軽油を燃料とする圧縮着火式のディーゼルエンジンであっても良く、あるいは電動機など他の原動機であっても良い。
10 自動変速機、12 入力軸、14 中間軸、16 カウンタ軸、20 アイドル軸、22 出力軸、24 後進アイドル軸、30 エンジン(EG。動力源。内燃機関)、32 車両、34 油圧供給機構、36 ECU(電子制御ユニット)、40 DBW機構、44 アクセル開度センサ、52,54,56 第1、第2、第3回転数センサ、CT1からCT6 クラッチ(摩擦係合要素)、GMVなど ギヤ、CP カプリング機構
Claims (4)
- 車両に搭載された動力源に接続される入力軸と駆動輪に接続される出力軸との間に油圧を給排されて作動する摩擦係合要素を介して確立可能なギヤ群からなる複数の変速段を備える自動変速機と、アクセル開度APと車速Vを検出し、確立されている現変速段GAに対し、前記検出されたアクセル開度APと車速Vとから変速マップを検索して得られる変速段GBがダウンシフト線/アップシフト線を超えるとき、前記自動変速機の摩擦係合要素に油圧を給排して前記変速段GBにアップシフト/ダウンシフトさせる変速制御手段とを備えた自動変速機の制御装置において、前記検出されたアクセル開度の単位時間当たりの変化量ΔAPと前記検出された車速の単位時間当たりの変化量ΔVを算出する変化量算出手段と、前記算出されたアクセル開度の変化量ΔAPと車速の変化量ΔVとを有向線分として合成されるベクトルからなる変速予測値を算出する変速予測値算出手段と、前記算出された変速予測値が少なくとも前記現変速段GAより1段低速の変速段の前記ダウンシフト線を超えると共に、前記検出されたアクセル開度APが少なくとも前記現変速段GAの前記アップシフト線をダウンシフト方向に超えるとき、前記現変速段GAから少なくとも1段ダウンシフトされる変速段を前記変速段GBとして前記変速段GBに向けてダウンシフトを開始させるダウンシフト開始手段と、前記ダウンシフトが開始されてから所定時間が経過するまでに前記検出されたアクセル開度APが前記ダウンシフト線を超えたか否か判定する予測後アクセル開度判定手段とを備えると共に、前記変速制御手段は、前記検出されたアクセル開度APが前記ダウンシフト線を超えたと判定されるときは前記変速段GBにダウンシフトさせる一方、前記検出されたアクセル開度APが前記ダウンシフト線を超えたと判定されないときは前記開始させたダウンシフトを中止させることを特徴とする自動変速機の制御装置。
- 前記予測後アクセル開度判定手段は、前記変速制御手段は、前記検出されたアクセル開度APが前記ダウンシフト線を超えたと判定されないときは前記開始させたダウンシフトを中止すると共に、所定の条件が成立する場合、前記現変速段GAを前記変速段GBとして前記変速段GBに変更することを特徴とする請求項1記載の自動変速機の制御装置。
- 前記変速制御手段は、前記変速予測値が前記現変速段GAよりも2段以上低速の前記変速段GBと予測され、予測後に前記検出されたアクセル開度APが前記変速段GBのアップシフト線をダウンシフト方向に超えたときに前記変速段GBへのダウンシフトを開始させ、前記ダウンシフトが開始されてから所定時間が経過したときに前記検出されたアクセル開度APが前記変速段GBよりも少なくとも1変速段高い変速段GCの前記ダウンシフト線を超えていたときには前記変速段GBを前記変速段GBよりも少なくとも1変速段高い前記変速段GCに変更することを特徴とする請求項1または2記載の自動変速機の制御装置。
- 前記所定の条件が成立する場合は、前記入力軸と出力軸の回転数比が規定範囲内にある場合であることを特徴とする請求項2または3記載の自動変速機の制御装置。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2013068821A JP2014190498A (ja) | 2013-03-28 | 2013-03-28 | 自動変速機の制御装置 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2013068821A JP2014190498A (ja) | 2013-03-28 | 2013-03-28 | 自動変速機の制御装置 |
Publications (1)
| Publication Number | Publication Date |
|---|---|
| JP2014190498A true JP2014190498A (ja) | 2014-10-06 |
Family
ID=51836945
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2013068821A Pending JP2014190498A (ja) | 2013-03-28 | 2013-03-28 | 自動変速機の制御装置 |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP2014190498A (ja) |
Cited By (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US10717441B2 (en) | 2017-12-20 | 2020-07-21 | Toyota Jidosha Kabushiki Kaisha | Vehicle control system |
| US10759434B2 (en) | 2017-07-31 | 2020-09-01 | Hyundai Motor Company | Apparatus and method for controlling transmission of vehicle |
| US10865878B2 (en) | 2017-11-30 | 2020-12-15 | Toyota Jidosha Kabushiki Kaisha | Control system for vehicle |
-
2013
- 2013-03-28 JP JP2013068821A patent/JP2014190498A/ja active Pending
Cited By (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US10759434B2 (en) | 2017-07-31 | 2020-09-01 | Hyundai Motor Company | Apparatus and method for controlling transmission of vehicle |
| US10865878B2 (en) | 2017-11-30 | 2020-12-15 | Toyota Jidosha Kabushiki Kaisha | Control system for vehicle |
| US10717441B2 (en) | 2017-12-20 | 2020-07-21 | Toyota Jidosha Kabushiki Kaisha | Vehicle control system |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| US7621844B2 (en) | Shift control device for vehicle transmission | |
| EP1347195B1 (en) | Twin-Clutch transmission system | |
| JP5485370B2 (ja) | 自動変速機の制御装置 | |
| JP2002130454A (ja) | 自動変速機の制御装置 | |
| JP2014190498A (ja) | 自動変速機の制御装置 | |
| JP5363970B2 (ja) | 自動変速機の制御装置 | |
| JP3989800B2 (ja) | 自動変速機の制御装置 | |
| JP5676690B2 (ja) | 油圧クラッチの充填判定装置 | |
| JP2001165292A (ja) | 自動変速機の制御装置 | |
| JP4696692B2 (ja) | 自動変速制御装置 | |
| JP5451437B2 (ja) | 自動変速機の制御装置 | |
| JP4139652B2 (ja) | 自動変速機の制御装置 | |
| JP4139654B2 (ja) | 自動変速機の制御装置 | |
| JP2006336715A (ja) | 自動変速制御装置 | |
| JP4070549B2 (ja) | 自動変速機の制御装置 | |
| JP6000896B2 (ja) | 自動変速機の制御装置 | |
| JP5162547B2 (ja) | 自動変速機の制御装置 | |
| JP2011137535A (ja) | 車両の重量推定装置 | |
| JP2010096211A (ja) | 変速機の制御装置 | |
| JP4117168B2 (ja) | 自動変速機の制御装置 | |
| JP4139653B2 (ja) | 自動変速機の制御装置 | |
| JP4415310B2 (ja) | 自動変速制御装置 | |
| JP5621454B2 (ja) | 車両自動用変速機の変速制御装置 | |
| JP2004100783A (ja) | 自動変速機の制御装置 | |
| JP6118240B2 (ja) | 自動変速機の制御装置 |