JP2014016981A - 移動面認識装置、移動面認識方法及び移動面認識用プログラム - Google Patents
移動面認識装置、移動面認識方法及び移動面認識用プログラム Download PDFInfo
- Publication number
- JP2014016981A JP2014016981A JP2013091430A JP2013091430A JP2014016981A JP 2014016981 A JP2014016981 A JP 2014016981A JP 2013091430 A JP2013091430 A JP 2013091430A JP 2013091430 A JP2013091430 A JP 2013091430A JP 2014016981 A JP2014016981 A JP 2014016981A
- Authority
- JP
- Japan
- Prior art keywords
- image
- parallax
- value
- moving surface
- moving
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Pending
Links
Images










Classifications
-
- G—PHYSICS
- G06—COMPUTING; CALCULATING OR COUNTING
- G06V—IMAGE OR VIDEO RECOGNITION OR UNDERSTANDING
- G06V20/00—Scenes; Scene-specific elements
- G06V20/50—Context or environment of the image
- G06V20/56—Context or environment of the image exterior to a vehicle by using sensors mounted on the vehicle
- G06V20/588—Recognition of the road, e.g. of lane markings; Recognition of the vehicle driving pattern in relation to the road
-
- G—PHYSICS
- G06—COMPUTING; CALCULATING OR COUNTING
- G06V—IMAGE OR VIDEO RECOGNITION OR UNDERSTANDING
- G06V10/00—Arrangements for image or video recognition or understanding
- G06V10/10—Image acquisition
- G06V10/12—Details of acquisition arrangements; Constructional details thereof
- G06V10/14—Optical characteristics of the device performing the acquisition or on the illumination arrangements
- G06V10/147—Details of sensors, e.g. sensor lenses
Landscapes
- Engineering & Computer Science (AREA)
- Physics & Mathematics (AREA)
- General Physics & Mathematics (AREA)
- Multimedia (AREA)
- Theoretical Computer Science (AREA)
- General Health & Medical Sciences (AREA)
- Health & Medical Sciences (AREA)
- Vascular Medicine (AREA)
- Image Analysis (AREA)
- Length Measuring Devices By Optical Means (AREA)
- Image Processing (AREA)
- Traffic Control Systems (AREA)
- Measurement Of Optical Distance (AREA)
Abstract
【解決手段】撮像部110A,110Bにより撮像した複数の撮像画像から視差値を算出し、その算出結果に基づいて路面領域(移動面画像領域)を認識する際、各撮像部が撮像した撮像画像から、偏光方向が互いに異なる複数の偏光成分(p偏光成分とs偏光成分)に基づいて計算した差分偏光度に応じた画素値をもつ差分偏光度画像を生成し、視差値を算出するための基準画像及び比較画像として差分偏光度画像を用いる。
【選択図】図5
Description
なお、本発明に係る移動面認識装置は、車載機器制御システムに限らず、例えば、撮像画像に基づいて物体検出を行う物体検出装置を搭載したその他のシステムにも適用できる。
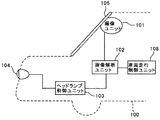
本車載機器制御システムは、自動車などの自車両100に搭載された撮像ユニットで撮像した自車両進行方向前方領域(撮像領域)の撮像画像データを利用して認識対象物の認識結果に応じて各種車載機器の制御を行うものである。
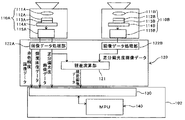
撮像ユニット101は、撮像手段としての2つの撮像部110A,110Bを備えたステレオカメラであり、2つの撮像部110A,110Bの構成は同一のものである。各撮像部110A,110Bは、それぞれ、撮像レンズ111A,111Bと、光学フィルタ112A,112Bと、撮像素子が2次元配置された画像センサ113A,113Bを含んだセンサ基板114A,114Bと、センサ基板114A,114Bから出力されるアナログ電気信号(画像センサ113A,113B上の各受光素子が受光した受光量)をデジタル電気信号に変換した撮像画像データを生成して出力する信号処理部115A,115Bとから構成されている。
画像センサ113A,113Bは、CCD(Charge Coupled Device)やCMOS(Complementary Metal Oxide Semiconductor)などを用いたイメージセンサであり、その撮像素子(受光素子)にはフォトダイオード113aを用いている。フォトダイオード113aは、撮像画素ごとに2次元的にアレイ配置されており、フォトダイオード113aの集光効率を上げるために、各フォトダイオード113aの入射側にはマイクロレンズ113bが設けられている。この画像センサ113A,113Bがワイヤボンディングなどの手法によりPWB(printed wiring board)に接合されてセンサ基板114A,114Bが形成されている。
光学フィルタ112A,112Bの偏光フィルタ層112aは、画像センサ113A,113B上の1つのフォトダイオード113a(一撮像画素)の縦列(鉛直方向)に平行に振動する垂直偏光成分(P偏光成分)のみを選択して透過させる垂直偏光領域と、画像センサ113A,113B上の1つのフォトダイオード113aの横列(水平方向)に平行に振動する水平偏光成分(S偏光成分)のみを選択して透過させる水平偏光領域とに領域分割されている。一方、光学フィルタ112A,112Bの分光フィルタ層112bは、赤色波長帯の光のみを選択して透過させる赤色分光領域と、波長選択を行わずに光を透過させる非分光領域とに領域分割されている。
差分偏光度=(p偏光成分−s偏光成分)/(p偏光成分+s偏光成分) ・・(1)
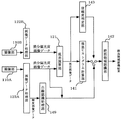
図5は、本実施形態の路面識処理に関わる機能ブロック図である。
図6は、本実施形態の路面識処理に関わるフローチャートである。
なお、図5に示す機能ブロック図の各処理ブロックで行われる処理は、専用のハードウェアを用いて処理してもいし、汎用の演算器を使用してソフトウェア処理により行ってもよい。本実施形態では、視差演算部121から視差画像データが出力された後の各処理ブロック141,142,143及び白線認識処理部149は、画像解析ユニット102のMPU140によるソフトウェア処理によって実現される。
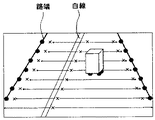
図8(a)に示す画像例は、中央分離帯を有する片側2車線の直線道路において自車両が左車線を走行している状況を撮像したものであり、図中符号CLは中央分離帯を映し出す中央分離帯画像部であり、図中符号WLは車線境界線である白線を映し出す白線画像部(車線境界線画像部)であり、図中符号ELは路端に存在する縁石等の段差を映し出す路端段差画像部である。以下、路端段差画像部EL及び中央分離帯段差画像部CLをまとめて段差画像部という。また、図中破線で囲まれた領域RSは、中央分離帯と路側段差とによって区画される車両走行が可能な路面領域(移動面画像領域)である。
上記のような信頼度判定方法の他、照度自体の高低、輝度のコントラストの大小などを用いることによって、信頼度の判定を行っても良い。
本例においては、画像データ処理部122Aから輝度画像データを取得したら(S21)、まず、輝度の閾値を設定する(S22)。このとき、画像上方と下方とでは、白線のコントラストが違っているため、同一の閾値を用いて処理を行うと、良好な結果が得られない場合がある。そのような場合には、1つの画像を上方と下方の2つのエリアを分け、それぞれに適用する輝度の閾値を個別に設定する。このようにして設定される輝度の閾値を用いて、輝度画像データの各画素値(輝度)と当該閾値との大小比較を行う(S23)。この大小比較により閾値以上の輝度をもつ画素を白線エッジの候補点として検出する。その後、検出された白線エッジの候補点と、予め定められた白線幅の閾値との大小比較を行って、検出された白線エッジの候補点による白線幅が妥当か否かを判断する(S24)。この判断において妥当であると判断された場合、検出された白線エッジの候補点を、1本の白線の両端エッジを示す一対の白線エッジ部として抽出する。
本例においては、白線認識処理部149から出力される白線認識結果と、画像データ処理部122Aから出力される差分偏光度画像データとを取得したら(S31)、閾値を設定した後に(S32)、上述した処理を行う。すなわち、白線認識結果に基づき、差分偏光度画像データ上の白線画像部に対応する地点を特定し、差分偏光度画像データの各行(ライン)について、その白線画像部の画像中央側(内側)に近接する画素(路面基準画素)の画素値(差分偏光度)を取得する。その後、差分偏光度画像データの各行(ライン)について、白線画像部から画像左右方向外側に向かって例えば1画素ずつ対象画素をずらし、各対象画素の差分偏光度と路面基準画素の差分偏光度との差分値を算出していく(S33)。対象画素が路面を映し出すものであれば、その対象画素の差分偏光度と路面基準画素の差分偏光度とはほぼ同じ値をとるが、対象画素が路端に存在する縁石等の段差、壁などの路面側端部材を映し出すものであれば、その対象画素の差分偏光度は、路面基準画素の差分偏光度とは大きく異なる値をとる。したがって、各対象画素の差分偏光度と路面基準画素の差分偏光度との差分値を算出していき、その差分値が閾値を超える箇所が現れたら(S34)、その箇所が路面と路面側端部材との境界(路端エッジ)に対応すると判断し、その対象画素を路端エッジとして抽出する(S35)。
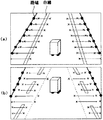
本例では、2本の白線が映し出されている撮像画像において、それらの白線に対応する白線エッジ部が適切に抽出された例である。この場合、上述したとおり、差分偏光度画像データの各行(ライン)について、白線画像部から画像左右方向外側に向かって、白線内側の路面基準画素の差分偏光度と白線外側の各対象画素の差分偏光度との差分値を算出していき、その差分値を閾値と比較することで、路端エッジを抽出する。なお、図11において、図中「×」で示す箇所は、路面基準画素の差分偏光度との差分値が閾値未満である対象画素を示し、当該差分値が閾値以上となった対象画素は「●」で示してある。したがって、「●」で示す画素を結んだ線が路端エッジを示すものと認識される。
本例では、画像左側部分に1本の白線が映し出されている撮像画像において、その白線に対応する白線エッジ部が適切に抽出された例である。この場合、画像左側の路端エッジについては、認識された白線画像部から画像左側に向かって、白線内側の路面基準画素の差分偏光度と白線外側の各対象画素の差分偏光度との差分値を算出していき、その差分値を閾値と比較することで、路端エッジを抽出する。一方、画像右側の路端エッジについては、認識された白線画像部から画像右側に向かって、路面基準画素の差分偏光度と白線外側の各対象画素の差分偏光度との差分値を算出していき、その差分値を閾値と比較することで、路端エッジを抽出する。このときの路面基準画素は、画像左側の路端エッジの抽出時に用いる路面基準画素と同じものを用いる。
本例では、前回の撮像画像(フレーム)では図13(a)に示すように2本の白線が適切に抽出できていたが、今回の撮像画像(フレーム)では図13(b)に示すように2本の白線がいずれも抽出できなかった例である。この場合、今回の撮像画像についての路端エッジの抽出には、前回の撮像画像における白線認識結果(図13(b)中破線で示す。)を用いる。すなわち、差分偏光度画像データの各行(ライン)について、前回の撮像画像で認識された白線画像部から画像左右方向外側に向かって、白線内側の路面基準画素の差分偏光度と白線外側の各対象画素の差分偏光度との差分値を算出していき、その差分値を閾値と比較することで、路端エッジを抽出する。
本例では、前回の撮像画像(フレーム)でも図14(a)に示すように白線エッジ部が抽出されず、かつ、今回の撮像画像(フレーム)でも図14(b)に示すように白線エッジ部が抽出されなかった例である。この場合、差分偏光度画像データの各行(ライン)について、画像左右方向中央の画素を路面基準画素とし、画像左右方向中央から画像左右方向両側に向かって、当該路面基準画素の差分偏光度と各対象画素の差分偏光度との差分値を算出していき、その差分値を閾値と比較することで、路端エッジを抽出する。
本例では、前回の撮像画像(フレーム)では図15(a)に示すように連続的な白線エッジ部が抽出されていたが、今回の撮像画像(フレーム)では図15(b)に示すように断続的な白線エッジ部が抽出された例である。この場合、白線エッジ部が抽出されている行(ライン)については、その白線画像部から画像左右方向外側に向かって、白線内側の路面基準画素の差分偏光度と白線外側の各対象画素の差分偏光度との差分値を算出していき、その差分値を閾値と比較することで、路端エッジを抽出する。一方、白線エッジ部が抽出されていない行(ライン)については、前回の撮像画像における白線認識結果(図15(b)中破線で示す。)を用い、前回の撮像画像で認識された白線画像部から画像左右方向外側に向かって、白線内側の路面基準画素の差分偏光度と白線外側の各対象画素の差分偏光度との差分値を算出していき、その差分値を閾値と比較することで、路端エッジを抽出する。
本例では、前回の撮像画像(フレーム)では図16(a)に示すように白線エッジ部が抽出されず、今回の撮像画像(フレーム)では連続的な白線エッジ部が一部だけ抽出されている例である。この場合、白線エッジ部が抽出されている行(ライン)については、その白線画像部から画像左右方向外側に向かって、白線内側の路面基準画素の差分偏光度と白線外側の各対象画素の差分偏光度との差分値を算出していき、その差分値を閾値と比較することで、路端エッジを抽出する。一方、白線エッジ部が抽出されていない行(ライン)については、今回の撮像画像で抽出された白線エッジ部を延長した仮想の白線エッジ部(図16(b)中破線で示す。)を用い、当該仮想の白線エッジ部によって特定される白線画像部から画像左右方向外側に向かって、白線内側の路面基準画素の差分偏光度と白線外側の各対象画素の差分偏光度との差分値を算出していき、その差分値を閾値と比較することで、路端エッジを抽出する。
(態様A)
路面等の移動面上を移動する自車両100等の移動体に搭載された2つの撮像部110A,110B等の複数の撮像手段により移動体周囲の撮像領域を撮像して得られる複数の撮像画像の1つである基準画像上で視差算出対象箇所を設定し、設定した視差算出対象箇所についての画素値特徴量と一致し又は所定の近似範囲内に含まれる画素値特徴量を有する対応箇所を、他の撮像画像である比較画像内から特定し、特定した対応箇所と当該視差算出対象箇所との視差値を算出する視差演算部121等の視差算出手段と、上記視差算出手段の算出結果に基づいて、上記撮像手段により撮像した撮像画像内の上記移動面を映し出す路面領域RS等の移動面画像領域を認識する処理を行う路面領域認識部142等の移動面認識処理手段とを有する移動面認識装置であって、上記撮像手段が撮像した撮像画像から、偏光方向が互いに異なる複数の偏光成分(p偏光成分とs偏光成分)に基づいて計算した差分偏光度等の指標値に応じた画素値をもつ差分偏光度画像等の指標値画像を生成する画像データ処理部122A,122B等の指標値画像生成手段を有し、上記視差算出手段は、上記基準画像及び上記比較画像として、上記指標値画像生成手段により生成される指標値画像を用いて、上記視差値を算出することを特徴とする。
視差値を用いて移動面画像領域を高い精度で認識するためには、その視差値の精度が重要となる。視差値の精度を高めるには、基準画像上に設定した視差算出対象箇所についての画素値特徴量と一致し又は所定の近似範囲内に含まれる画素値特徴量を有する対応箇所を比較画像内から高精度に特定することが必要となる。このとき、輝度画像から視差値を算出する場合、例えば撮像領域が暗くて輝度画像内に十分な輝度差が現れないような状況では、基準画像や比較画像上において画素値特徴量に違いが出にくく、対応箇所の特定精度が悪いので、高精度な視差値を算出できない。これに対し、本態様のように、偏光方向が互いに異なる複数の偏光成分に基づいて計算した指標値に応じた画素値をもつ指標値画像を基準画像及び比較画像として視差値を算出する場合には、十分な輝度差が得られない撮像状況下でも、基準画像や比較画像上において画素値特徴量に違いが出やすい。よって、本態様によれば、十分な輝度差が得られない撮像状況下でも、高精度な視差値を算出することが可能であるため、視差値を用いた移動面画像領域の認識処理を高精度に行うことができる。
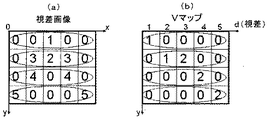
上記態様Aにおいて、上記視差算出手段が算出した視差値に基づいて、上記撮像画像を上下方向に複数分割して得られる各行領域内における視差値の頻度分布を示す視差ヒストグラム情報を生成する視差ヒストグラム計算部141等の視差ヒストグラム情報生成手段を有し、上記移動面認識処理手段は、上記視差ヒストグラム情報に基づいて、予め決められた規定値を超える頻度をもった視差値又は視差値範囲の中から、上記撮像画像の上方に向かうほど値が低くなるという特徴に合致した一群の視差値又は視差値範囲を選別し、選別した一群の視差値又は視差値範囲に対応する上記撮像画像上の画素が属する画像領域を、上記移動面画像領域として認識する処理を行うことを特徴とする。
これによれば、移動面画像領域の認識処理を簡易かつ高精度に行うことができる。
上記態様Bにおいて、上記移動面認識処理手段は、予め決められた規定値を超える頻度をもった視差値又は視差値範囲をその視差値に応じて複数に区分し、区分ごとに当該視差値又は視差値範囲を上記撮像画像の上方に向かうほど一定の割合で視差値が低くなるように近似処理し、近似処理した一群の視差値又は視差値範囲を上記特徴に合致した一群の視差値又は視差値範囲として選別することを特徴とする。
これによれば、路面の傾斜状況が途中で変化しているような路面画像領域についても、精度よく認識することができる。
上記A〜Cのいずれかの態様において、上記基準画像を撮像する撮像部110A等の撮像手段により撮像した撮像画像から上記指標値画像生成手段が生成した指標値画像の画素値が規定値以上変化する箇所をエッジ箇所として抽出し、その抽出結果に基づいて上記移動面画像領域の候補領域を検出する路面領域認識部142等の候補領域検出手段を有し、上記移動面認識処理手段は、上記候補領域検出手段の検出結果と上記視差算出手段の算出結果とに基づいて上記移動面画像領域を認識する処理を行うことを特徴とする。
これによれば、視差算出手段の算出結果だけでなく、指標値画像のエッジ箇所の抽出結果も用いて、移動面画像領域を認識することができるので、高精度な認識結果をより安定して提供することが可能である。
上記態様Dにおいて、基準画像上の視差算出対象箇所に対応して特定された比較画像上の対応箇所の特定精度に応じて、上記視差算出手段の算出結果の信頼度を決定する信頼度判定部143等の視差値信頼度決定手段を有し、上記移動面認識処理手段は、上記視差値信頼度決定手段が決定した信頼度が規定条件を満たすときは、上記視差算出手段の算出結果に基づいて上記移動面画像領域を認識し、該信頼度が該規定条件を満たさないときは、上記候補領域検出手段の検出結果に基づいて上記移動面画像領域を認識する処理を行うことを特徴とする。
これによれば、より精度の高い認識結果を安定して提供することが可能となる。
上記態様A〜Eのいずれかの態様において、上記撮像手段を備えていることを特徴とする。
これによれば、移動面認識装置を車両に設置する用途に使用することができる。
移動面上を移動する移動体に搭載された複数の撮像手段により移動体周囲の撮像領域を撮像して得られる複数の撮像画像の1つである基準画像上で視差算出対象箇所を設定し、設定した視差算出対象箇所についての画素値特徴量と一致し又は所定の近似範囲内に含まれる画素値特徴量を有する対応箇所を、他の撮像画像である比較画像内から特定し、特定した対応箇所と当該視差算出対象箇所との視差値を算出する視差算出工程と、上記視差算出工程の算出結果に基づいて、上記撮像手段により撮像した撮像画像内の上記移動面を映し出す移動面画像領域を認識する処理を行う移動面認識処理工程とを有する移動面認識方法であって、上記撮像手段が撮像した撮像画像から、偏光方向が互いに異なる複数の偏光成分に基づいて計算した指標値に応じた画素値をもつ指標値画像を生成する指標値画像生成工程を有し、上記視差算出工程では、上記基準画像及び上記比較画像として、上記指標値画像生成手段により生成される指標値画像を用いて、上記視差値を算出することを特徴とする。
これによれば、十分な輝度差が得られない撮像状況下でも、高精度な視差値を算出することが可能であるため、視差値を用いた移動面画像領域の認識処理を高精度に行うことができる。
移動面上を移動する移動体に搭載された複数の撮像手段により移動体周囲の撮像領域を撮像して得られる複数の撮像画像の1つである基準画像上で視差算出対象箇所を設定し、設定した視差算出対象箇所についての画素値特徴量と一致し又は所定の近似範囲内に含まれる画素値特徴量を有する対応箇所を、他の撮像画像である比較画像内から特定し、特定した対応箇所と当該視差算出対象箇所との視差値を算出する視差算出工程と、上記視差算出工程の算出結果に基づいて、上記撮像手段により撮像した撮像画像内の上記移動面を映し出す移動面画像領域を認識する処理を行う移動面認識処理工程とを、コンピュータに実行させるための移動面認識用プログラムであって、上記撮像手段が撮像した撮像画像から、偏光方向が互いに異なる複数の偏光成分に基づいて計算した指標値に応じた画素値をもつ指標値画像を生成する指標値画像生成工程を上記コンピュータに実行させるものであって、上記視差算出工程では、上記基準画像及び上記比較画像として、上記指標値画像生成手段により生成される指標値画像を用いて、上記視差値を算出することを特徴とする。
これによれば、十分な輝度差が得られない撮像状況下でも、高精度な視差値を算出することが可能であるため、視差値を用いた移動面画像領域の認識処理を高精度に行うことができる。
尚、このプログラムは、CD−ROM等の記録媒体に記録された状態で配布したり、入手したりすることができる。また、このプログラムを乗せ、所定の送信装置により送信された信号を、公衆電話回線や専用線、その他の通信網等の伝送媒体を介して配信したり、受信したりすることでも、配布、入手が可能である。この配信の際、伝送媒体中には、コンピュータプログラムの少なくとも一部が伝送されていればよい。すなわち、コンピュータプログラムを構成するすべてのデータが、一時に伝送媒体上に存在している必要はない。このプログラムを乗せた信号とは、コンピュータプログラムを含む所定の搬送波に具現化されたコンピュータデータ信号である。また、所定の送信装置からコンピュータプログラムを送信する送信方法には、プログラムを構成するデータを連続的に送信する場合も、断続的に送信する場合も含まれる。
101 撮像ユニット
102 画像解析ユニット
103 ヘッドランプ制御ユニット
104 ヘッドランプ
105 フロントガラス
108 車両走行制御ユニット
110A,110B 撮像部
112A,112B 光学フィルタ
112a 偏光フィルタ層
120 処理ハードウェア部
121 視差演算部
122A,122B 画像データ処理部
130 メモリ
141 視差ヒストグラム計算部
142 路面領域認識部
143 信頼度判定部
149 白線認識処理部
Claims (9)
- 移動面上を移動する移動体に搭載された撮像手段により移動体周囲の撮像領域を撮像して得られる撮像画像に基づいて、該撮像画像内の移動面画像領域を認識する移動面認識装置であって、
上記移動体に搭載される複数の撮像手段がそれぞれ撮像した複数の撮像画像から、偏光方向が互いに異なる複数の偏光成分に基づいて計算した指標値に応じた画素値をもつ指標値画像をそれぞれ生成する指標値画像生成手段と、
上記複数の撮像画像から上記指標値画像生成手段がそれぞれ生成した複数の指標値画像に基づいて、各画素における視差値を算出する視差算出手段と、
上記視差算出手段が算出した視差値に基づいて上記移動面画像領域を認識する処理を行う移動面認識処理手段とを有することを特徴とする移動面認識装置。 - 請求項1の移動面認識装置において、
上記視差算出手段が算出した視差値に基づいて、上記撮像画像を上下方向に複数分割して得られる各行領域内における視差値の頻度分布を示す視差ヒストグラム情報を生成する視差ヒストグラム情報生成手段を有し、
上記移動面認識処理手段は、上記視差ヒストグラム情報に基づいて、予め決められた規定値を超える頻度をもった視差値又は視差値範囲の中から、上記撮像画像の上方に向かうほど値が低くなるという特徴に合致した一群の視差値又は視差値範囲を選別し、選別した一群の視差値又は視差値範囲に対応する上記撮像画像上の画素が属する画像領域を、上記移動面画像領域として認識する処理を行うことを特徴とする移動面認識装置。 - 請求項2の移動面認識装置において、
上記移動面認識処理手段は、予め決められた規定値を超える頻度をもった視差値又は視差値範囲をその視差値に応じて複数に区分し、区分ごとに当該視差値又は視差値範囲を上記撮像画像の上方に向かうほど一定の割合で視差値が低くなるように近似処理し、近似処理した一群の視差値又は視差値範囲を上記特徴に合致した一群の視差値又は視差値範囲として選別することを特徴とする移動面認識装置。 - 請求項1乃至3のいずれか1項に記載の移動面認識装置において、
上記基準画像を撮像する撮像手段により撮像した撮像画像から上記指標値画像生成手段が生成した指標値画像の画素値が規定値以上変化する箇所をエッジ箇所として抽出し、その抽出結果に基づいて上記移動面画像領域の候補領域を検出する候補領域検出手段を有し、
上記移動面認識処理手段は、上記候補領域検出手段の検出結果と上記視差算出手段の算出結果とに基づいて上記移動面画像領域を認識する処理を行うことを特徴とする移動面認識装置。 - 請求項4の移動面認識装置において、
上記視差算出手段の算出結果の信頼度を決定する視差値信頼度決定手段を有し、
上記移動面認識処理手段は、上記視差値信頼度決定手段が決定した信頼度が規定条件を満たすときは、上記視差算出手段の算出結果に基づいて上記移動面画像領域を認識し、該信頼度が該規定条件を満たさないときは、上記候補領域検出手段の検出結果に基づいて上記移動面画像領域を認識する処理を行うことを特徴とする移動面認識装置。 - 請求項5の移動面認識装置において、
上記視差値信頼度決定手段は、基準画像上の視差算出対象箇所に対応して特定された比較画像上の対応箇所の特定精度に応じて、上記視差算出手段の算出結果の信頼度を決定することを特徴とする移動面認識装置。 - 請求項1乃至6のいずれか1項に記載の移動面認識装置において、
上記複数の撮像手段を備えていることを特徴とする移動面認識装置。 - 移動面上を移動する移動体に搭載された撮像手段により移動体周囲の撮像領域を撮像して得られる撮像画像に基づいて、該撮像画像内の移動面画像領域を認識する移動面認識方法であって、
上記移動体に搭載される複数の撮像手段がそれぞれ撮像した複数の撮像画像から、偏光方向が互いに異なる複数の偏光成分に基づいて計算した指標値に応じた画素値をもつ指標値画像をそれぞれ生成する指標値画像生成工程と、
上記指標値画像生成工程で上記複数の撮像画像からそれぞれ生成された複数の指標値画像に基づいて、各画素における視差値を算出する視差算出工程と、
上記視差算出工程で算出された視差値に基づいて上記移動面画像領域を認識する処理を行う移動面認識処理手段とを有することを特徴とする移動面認識方法。 - 移動面上を移動する移動体に搭載された撮像手段により移動体周囲の撮像領域を撮像して得られる撮像画像に基づいて、該撮像画像内の移動面画像領域を認識するための工程を、コンピュータに実行させるための移動面認識用プログラムにおいて、
上記移動体に搭載される複数の撮像手段がそれぞれ撮像した複数の撮像画像から、偏光方向が互いに異なる複数の偏光成分に基づいて計算した指標値に応じた画素値をもつ指標値画像をそれぞれ生成する指標値画像生成工程と、
上記指標値画像生成工程で上記複数の撮像画像からそれぞれ生成された複数の指標値画像に基づいて、各画素における視差値を算出する視差算出工程と、
上記視差算出工程で算出された視差値に基づいて上記移動面画像領域を認識する処理を行う移動面認識処理手段とを、上記コンピュータに実行させることを特徴とする移動面認識用プログラム。
Priority Applications (2)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2013091430A JP2014016981A (ja) | 2012-06-15 | 2013-04-24 | 移動面認識装置、移動面認識方法及び移動面認識用プログラム |
| EP13171342.2A EP2674893A3 (en) | 2012-06-15 | 2013-06-11 | Travelable area recognition system, travelable area recognition method, travelable area recognition program executed on the travelable area recognition system, and recording medium storing travelable area recognition program |
Applications Claiming Priority (3)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2012135869 | 2012-06-15 | ||
| JP2012135869 | 2012-06-15 | ||
| JP2013091430A JP2014016981A (ja) | 2012-06-15 | 2013-04-24 | 移動面認識装置、移動面認識方法及び移動面認識用プログラム |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2014016981A true JP2014016981A (ja) | 2014-01-30 |
| JP2014016981A5 JP2014016981A5 (ja) | 2017-01-12 |
Family
ID=48740824
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2013091430A Pending JP2014016981A (ja) | 2012-06-15 | 2013-04-24 | 移動面認識装置、移動面認識方法及び移動面認識用プログラム |
Country Status (2)
| Country | Link |
|---|---|
| EP (1) | EP2674893A3 (ja) |
| JP (1) | JP2014016981A (ja) |
Cited By (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2016081088A (ja) * | 2014-10-09 | 2016-05-16 | キヤノン株式会社 | 画像処理装置、画像処理方法及びプログラム |
| JP2019159529A (ja) * | 2018-03-09 | 2019-09-19 | パイオニア株式会社 | 線検出装置、線検出方法、プログラム、及び記憶媒体 |
| WO2020049638A1 (ja) * | 2018-09-04 | 2020-03-12 | 株式会社ソニー・インタラクティブエンタテインメント | 情報処理装置およびプレイフィールド逸脱検知方法 |
Families Citing this family (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US9747507B2 (en) * | 2013-12-19 | 2017-08-29 | Texas Instruments Incorporated | Ground plane detection |
Citations (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2010064531A (ja) * | 2008-09-08 | 2010-03-25 | Toyota Central R&D Labs Inc | 白線検出装置 |
| JP2011085539A (ja) * | 2009-10-19 | 2011-04-28 | Ricoh Co Ltd | 測距カメラ装置 |
| JP2011150689A (ja) * | 2009-12-25 | 2011-08-04 | Ricoh Co Ltd | 撮像装置、車載用撮像システム、路面外観認識方法及び物体識別装置 |
| JP2012033149A (ja) * | 2010-07-01 | 2012-02-16 | Ricoh Co Ltd | 物体識別装置 |
Family Cites Families (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH11345336A (ja) * | 1998-06-03 | 1999-12-14 | Nissan Motor Co Ltd | 障害物検出装置 |
| JP3352655B2 (ja) * | 1999-09-22 | 2002-12-03 | 富士重工業株式会社 | 車線認識装置 |
| EP2168079B1 (en) * | 2007-01-23 | 2015-01-14 | Valeo Schalter und Sensoren GmbH | Method and system for universal lane boundary detection |
-
2013
- 2013-04-24 JP JP2013091430A patent/JP2014016981A/ja active Pending
- 2013-06-11 EP EP13171342.2A patent/EP2674893A3/en not_active Withdrawn
Patent Citations (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2010064531A (ja) * | 2008-09-08 | 2010-03-25 | Toyota Central R&D Labs Inc | 白線検出装置 |
| JP2011085539A (ja) * | 2009-10-19 | 2011-04-28 | Ricoh Co Ltd | 測距カメラ装置 |
| JP2011150689A (ja) * | 2009-12-25 | 2011-08-04 | Ricoh Co Ltd | 撮像装置、車載用撮像システム、路面外観認識方法及び物体識別装置 |
| JP2012033149A (ja) * | 2010-07-01 | 2012-02-16 | Ricoh Co Ltd | 物体識別装置 |
Non-Patent Citations (2)
| Title |
|---|
| RAPHAEL LABAYRADE: "Real Time Obstacle Detction in Stereovision on Non Flat Road Geometry Through "V-disparity" Reprezen", INTELLIGENT VEHICLE SYMPOSIUM, 2002. IEEE, JPN6017010295, 17 June 2002 (2002-06-17), FR, pages 646 - 651, ISSN: 0003524387 * |
| 内藤 康太: "ステレオカメラを用いた視差情報による屋内床面抽出の研究", 情報処理学会研究報告 平成22年度▲6▼ [DVD−ROM] , vol. Vol.2011-ICS-163 No.5, JPN6017010294, 15 April 2011 (2011-04-15), JP, pages 1 - 6, ISSN: 0003524386 * |
Cited By (7)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2016081088A (ja) * | 2014-10-09 | 2016-05-16 | キヤノン株式会社 | 画像処理装置、画像処理方法及びプログラム |
| JP2019159529A (ja) * | 2018-03-09 | 2019-09-19 | パイオニア株式会社 | 線検出装置、線検出方法、プログラム、及び記憶媒体 |
| JP2023014131A (ja) * | 2018-03-09 | 2023-01-26 | パイオニア株式会社 | 線検出装置、線検出方法、プログラム、及び記憶媒体 |
| WO2020049638A1 (ja) * | 2018-09-04 | 2020-03-12 | 株式会社ソニー・インタラクティブエンタテインメント | 情報処理装置およびプレイフィールド逸脱検知方法 |
| JPWO2020049638A1 (ja) * | 2018-09-04 | 2021-08-12 | 株式会社ソニー・インタラクティブエンタテインメント | 情報処理装置およびプレイフィールド逸脱検知方法 |
| JP7101250B2 (ja) | 2018-09-04 | 2022-07-14 | 株式会社ソニー・インタラクティブエンタテインメント | 情報処理装置およびプレイフィールド逸脱検知方法 |
| US12070684B2 (en) | 2018-09-04 | 2024-08-27 | Sony Interactive Entertainment Inc. | Information processing apparatus and play field deviation detecting method |
Also Published As
| Publication number | Publication date |
|---|---|
| EP2674893A2 (en) | 2013-12-18 |
| EP2674893A3 (en) | 2016-11-09 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| KR101650266B1 (ko) | 노면 경사 인식 장치, 노면 경사 인식 방법, 및 컴퓨터가 노면 경사 인식을 실행하기 위한 컴퓨터 프로그램 | |
| US20210365696A1 (en) | Vehicle Intelligent Driving Control Method and Device and Storage Medium | |
| JP6202367B2 (ja) | 画像処理装置、距離測定装置、移動体機器制御システム、移動体及び画像処理用プログラム | |
| JP6376429B2 (ja) | 対象地点到達検知装置、対象地点到達検知用プログラム、移動体機器制御システム及び移動体 | |
| JP6197291B2 (ja) | 複眼カメラ装置、及びそれを備えた車両 | |
| JP5399027B2 (ja) | 自動車の運転を支援するための、立体画像を捕捉することができるシステムを有するデバイス | |
| JP6344638B2 (ja) | 物体検出装置、移動体機器制御システム及び物体検出用プログラム | |
| JP6126094B2 (ja) | 車載用画像認識装置 | |
| WO2017130639A1 (ja) | 画像処理装置、撮像装置、移動体機器制御システム、画像処理方法、及びプログラム | |
| US20130286205A1 (en) | Approaching object detection device and method for detecting approaching objects | |
| EP2669844B1 (en) | Level Difference Recognition System Installed in Vehicle and Recognition Method executed by the Level Difference Recognition System | |
| JP2013250907A (ja) | 視差算出装置、視差算出方法及び視差算出用プログラム | |
| JP6150164B2 (ja) | 情報検出装置、移動体機器制御システム、移動体及び情報検出用プログラム | |
| US20150302257A1 (en) | On-Vehicle Control Device | |
| JP6089767B2 (ja) | 画像処理装置、撮像装置、移動体制御システム及びプログラム | |
| JP2015148887A (ja) | 画像処理装置、物体認識装置、移動体機器制御システム及び物体認識用プログラム | |
| JP2014016981A (ja) | 移動面認識装置、移動面認識方法及び移動面認識用プログラム | |
| JP2016206801A (ja) | 物体検出装置、移動体機器制御システム及び物体検出用プログラム | |
| JP2014026396A (ja) | 移動面境界線認識装置、移動面境界線認識装置を備えた移動体、移動面境界線認識方法及び移動面境界線認識用プログラム | |
| JP2017129543A (ja) | ステレオカメラ装置及び車両 | |
| JP5950193B2 (ja) | 視差値演算装置及びこれを備えた視差値演算システム、移動面領域認識システム、視差値演算方法、並びに、視差値演算用プログラム | |
| JP2013250694A (ja) | 画像処理装置 | |
| JP2006318059A (ja) | 画像処理装置、画像処理方法、および画像処理用プログラム | |
| JP5723561B2 (ja) | 運転支援装置 | |
| CN115088248A (zh) | 摄像装置、摄像系统和摄像方法 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20160404 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20161129 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20170313 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20170324 |
|
| A02 | Decision of refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A02 Effective date: 20170922 |