JP2013252965A - 回収容器 - Google Patents
回収容器 Download PDFInfo
- Publication number
- JP2013252965A JP2013252965A JP2012131376A JP2012131376A JP2013252965A JP 2013252965 A JP2013252965 A JP 2013252965A JP 2012131376 A JP2012131376 A JP 2012131376A JP 2012131376 A JP2012131376 A JP 2012131376A JP 2013252965 A JP2013252965 A JP 2013252965A
- Authority
- JP
- Japan
- Prior art keywords
- bobbin
- threadless
- collection container
- thread
- yarn
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Pending
Links
Images









Landscapes
- Replacing, Conveying, And Pick-Finding For Filamentary Materials (AREA)
Abstract
【課題】糸無しボビンを精紡機に戻す前に行っていた、糸無しボビンの天尻方向を揃えるボビン整理作業を不要とする。
【解決手段】天尻方向を揃えた状態で糸無しボビンBが投入される、糸無しボビンBの回収容器であって、投入された糸無しボビンBを収容する収容部57を備える容器本体51と、収容部57の上方に形成される開口部67と、開口部67と収容部57との間に設置され、開口部67に投入される糸無しボビンBの天尻方向を維持しつつ、糸無しボビンBを収容部57に案内する規制部71と、を備える。
【選択図】図4
【解決手段】天尻方向を揃えた状態で糸無しボビンBが投入される、糸無しボビンBの回収容器であって、投入された糸無しボビンBを収容する収容部57を備える容器本体51と、収容部57の上方に形成される開口部67と、開口部67と収容部57との間に設置され、開口部67に投入される糸無しボビンBの天尻方向を維持しつつ、糸無しボビンBを収容部57に案内する規制部71と、を備える。
【選択図】図4
Description
本発明は、糸無しボビンの回収容器の技術に関する。
従来、複数の巻取ユニットを並設して構成される自動ワインダーが知られている。ボビントレー式の自動ワインダーは、複数の巻取ユニット、ボビン供給装置、ボビン搬送装置、糸無しボビン抜き取り装置等から構成される。精紡機で精紡された糸が巻かれたボビン(以下、糸付きボビンという)は、コンテナにばら積みしてボビン供給装置まで運搬され、ボビン供給装置に投入される。ボビン供給装置は、投入された糸付きボビン群から糸付きボビンを個別化してからボビン搬送装置のトレイに糸付きボビンを差し込んで装着する。ボビン搬送装置は、糸付きボビンを各巻取ユニットに搬送する。各巻取ユニットでは、トレイに装着された糸付きボビンから糸を解舒してパッケージを形成する。
各巻取ユニットで糸が解舒されて処理済みとなったボビン(以下、糸無しボビンという)は、巻取ユニットから排出される。排出された糸無しボビンは、ボビン搬送装置のトレイによって搬送される。糸無しボビン抜き取り装置は、ボビン搬送装置のトレイ上の糸無しボビンを抜き取る。糸無しボビンが抜き取られたトレイには、その下流側でボビン供給装置によって新たな糸付きボビンが装着される。
ところで、糸無しボビン抜き取り装置によって抜き取られた糸無しボビンは、糸無しボビンシュート部を経て回収箱に排出される。糸無しボビンシュート部を通過する際の糸無しボビンは、上下の向き(天尻方向)は揃えられている。しかしながら、糸無しボビンシュート部を通過した後、糸無しボビンが回収箱に無造作に投入されると、糸無しボビンの天尻方向が揃わずに不規則な状態になってしまう。この後、糸無しボビンを精紡機に戻す際には、糸無しボビンの天尻を揃える必要があるため、糸無しボビンの天尻方向が不規則であると、糸無しボビンを精紡機に戻す前に、糸無しボビンの天尻方向を揃えるボビン整理作業が必要になっている。従来、このボビン整理作業は、オペレータの手作業で行われており、手数の掛かる作業となっていた。
尚、特許文献1には、排出された糸無しボビンの天尻方向を揃えて収容するボビンボックス52が開示されている。しかしながら、特許文献1の技術では、ボビンボックス52とは別に受材54を設ける必要がある。また、ボビンボックス52を仕切板55で区画しなければならないことから、ボビンボックス52をピッチ送りするためのコンベア51が必要である。
本発明は、上記課題を解決すべくなされたものである。本発明の目的は、糸無しボビンを精紡機に戻す前に行っていた、糸無しボビンの天尻方向を揃えるボビン整理作業を不要とすることである。
本発明の解決しようとする課題は以上の如くであり、次にこの課題を解決するための手段を説明する。
第1の発明の回収容器は、天尻方向を揃えた状態で糸無しボビンが投入される、糸無しボビンの回収容器であって、
容器本体と、開口部と、規制部と、を備える。
容器本体は、投入された糸無しボビンを収容する収容部を備える。
開口部は、収容部の上方に形成される。
規制部は、開口部と収容部との間に設置され、開口部に投入される糸無しボビンの天尻方向を維持しつつ、糸無しボビンを収容部に案内する。
容器本体と、開口部と、規制部と、を備える。
容器本体は、投入された糸無しボビンを収容する収容部を備える。
開口部は、収容部の上方に形成される。
規制部は、開口部と収容部との間に設置され、開口部に投入される糸無しボビンの天尻方向を維持しつつ、糸無しボビンを収容部に案内する。
第2の発明の回収容器は、第1の発明の回収容器であって、
規制部は、短辺が糸無しボビンの長さよりも短く、長辺が糸無しボビンの長さよりも長い通過口に糸無しボビンを通過させることにより、糸無しボビンの天尻方向を維持する。
規制部は、短辺が糸無しボビンの長さよりも短く、長辺が糸無しボビンの長さよりも長い通過口に糸無しボビンを通過させることにより、糸無しボビンの天尻方向を維持する。
第3の発明の回収容器は、第2の発明の回収容器であって、
容器本体に対して開閉自在の蓋部を備える。
蓋部には、開口部及び規制部が設けられており、
規制部は、蓋部の内壁との間に通過口を形成し、かつ、投入された糸無しボビンを通過口に案内する傾斜板を備える。
容器本体に対して開閉自在の蓋部を備える。
蓋部には、開口部及び規制部が設けられており、
規制部は、蓋部の内壁との間に通過口を形成し、かつ、投入された糸無しボビンを通過口に案内する傾斜板を備える。
第4の発明の回収容器は、第3の発明の回収容器であって、
収容部は、取り出し補助部を備える。
取り出し補助部は、通過口の長辺に沿う方向の側壁に形成され、上部が開放端であり、かつ糸無しボビンの長さより短い幅の切り欠きである。
そして、蓋部は、取り出し補助部を覆う遮蔽部を備える。
収容部は、取り出し補助部を備える。
取り出し補助部は、通過口の長辺に沿う方向の側壁に形成され、上部が開放端であり、かつ糸無しボビンの長さより短い幅の切り欠きである。
そして、蓋部は、取り出し補助部を覆う遮蔽部を備える。
第5の発明の回収容器は、第1から第4のいずれかの発明の回収容器であって、
受け部と、支持部と、を備える。
受け部は、収容部の内部において、上下方向に移動可能に配置され、回収された糸無しボビンを支持する。
支持部は、受け部に支持される糸無しボビンが増加すると受け部を下降させ、受け部に支持される糸無しボビンが減少すると受け部を上昇させる。
受け部と、支持部と、を備える。
受け部は、収容部の内部において、上下方向に移動可能に配置され、回収された糸無しボビンを支持する。
支持部は、受け部に支持される糸無しボビンが増加すると受け部を下降させ、受け部に支持される糸無しボビンが減少すると受け部を上昇させる。
第6の発明の回収容器は、第5の発明の回収容器であって、
受け部は、回収された糸無しボビンが載置される受け部本体を備える。
受け部本体は、糸無しボビンが収容部の満杯位置まで回収されたときに上面が略水平になるように傾斜を付けて配置される。
受け部は、回収された糸無しボビンが載置される受け部本体を備える。
受け部本体は、糸無しボビンが収容部の満杯位置まで回収されたときに上面が略水平になるように傾斜を付けて配置される。
第7の発明の回収容器は、第1から第6のいずれかの発明の回収容器であって、
糸無しボビンが所定量回収されたことを検知する検知部を備える。
糸無しボビンが所定量回収されたことを検知する検知部を備える。
第8の発明の回収容器は、第2から第7のいずれかの発明の回収容器であって、
通過口の長辺が、投入される糸無しボビンの投入方向に沿う方向となるように、自動ワインダーに設置される。
通過口の長辺が、投入される糸無しボビンの投入方向に沿う方向となるように、自動ワインダーに設置される。
本発明の効果として、以下に示すような効果を奏する。
第1の発明の回収容器によれば、開口部と収容部との間に設置され、開口部に投入される糸無しボビンの天尻方向を維持しつつ、糸無しボビンを収容部に案内する規制部を備える。このため、天尻方向を揃えた状態で投入される糸無しボビンを、天尻方向が不規則な状態にしてしまうことがない。このため、糸無しボビンを精紡機に戻す前に行っていた、糸無しボビンの天尻方向を揃えるボビン整理作業を不要とすることができる。
第2の発明の回収容器によれば、規制部は、短辺が糸無しボビンの長さよりも短く、長辺が糸無しボビンの長さよりも長い通過口に糸無しボビンを通過させることにより、糸無しボビンの天尻方向を維持する。このため、開口部に投入される糸無しボビンの天尻方向を確実に維持しつつ、糸無しボビンを収容部に案内することができる。
第3の発明の回収容器によれば、蓋部には、開口部及び規制部が設けられており、規制部は、蓋部の内壁との間に通過口を形成し、かつ、投入された糸無しボビンを通過口に案内する傾斜板を備える。このため、蓋部を開放することで、規制部も移動させることができ、容器本体の収容部に収容されている糸無しボビンの取り出しが容易となる。
第4の発明の回収容器によれば、収容部は、上部が開放端であり、かつ糸無しボビンの長さより短い幅の切り欠きである取り出し補助部を備える。オペレータが回収容器から糸無しボビンを取り出す際、収容部の横の取り出し補助部から手を差し込んで糸無しボビンを持ち上げればよい。このため、収容部の上方から糸無しボビンを取り出す場合と比較して、糸無しボビンの取り出し作業を効率よく行うことができる。また、蓋部は、取り出し補助部を覆う遮蔽部を備えるため、蓋部を閉じた状態で取り出し補助部から糸無しボビンが落下するおそれがない。
第5の発明の回収容器によれば、回収された糸無しボビンを支持する受け部は、回収された糸無しボビンが増加してくると下降し、回収された糸無しボビンが減少すると上昇する。このため、回収された糸無しボビンが少ない状態であっても、開口部から投入された糸無しボビンの落下高さを低く抑えることができ、回収容器の内部で糸無しボビンが回転し、天尻方向が変わることを防止することができる。
また、オペレータが回収容器から糸無しボビンを取り出す際、受け部に支持される糸無しボビンが減少していくと、それに従って受け部が上昇するため、糸無しボビンの量が少なくなっても糸無しボビンの取り出しが容易である。
また、オペレータが回収容器から糸無しボビンを取り出す際、受け部に支持される糸無しボビンが減少していくと、それに従って受け部が上昇するため、糸無しボビンの量が少なくなっても糸無しボビンの取り出しが容易である。
第6の発明の回収容器によれば、回収された糸無しボビンが載置される受け部本体は、糸無しボビンが収容部の満杯位置まで回収されたときに上面が略水平になるように傾斜を付けて配置される。このため、天尻方向を揃えた状態で投入される糸無しボビンを効率よく収容することができる。
第7の発明の回収容器によれば、糸無しボビンが所定量回収されたことを検知する検知部を備える。このため、回収容器に糸無しボビンが所定量回収されたことを検知することができる。
第8の発明の回収容器によれば、回収容器が自動ワインダーに設置される方向は、通過口の長辺が、投入される糸無しボビンの投入方向に沿う方向である。このため、天尻方向を揃えた状態で投入される糸無しボビンが方向を変えずに通過口を通過しやすく、速やかに回収容器に収容していくことができる。
次に、発明の実施の形態について図を用いて説明する。
本発明の実施例1に係る回収容器40について、図1から図10を用いて説明する。本実施例の回収容器40が設置される自動ワインダー100は、ボビントレー式の自動ワインダーである。
まず、自動ワインダー100の概略について説明する。図1に示すように、自動ワインダー100は、主として複数の巻取ユニット10、ボビン搬送装置11、ボビン供給装置12、ボビン抜き取り装置13、回収容器40を備えている。
精紡機(図示せず)で精紡された糸が巻かれた糸付きボビンYBは、コンテナ8にばら積みしてボビン供給装置12まで運搬され、ボビン供給装置12に投入される。ボビン供給装置12は、投入された糸付きボビンYB群から糸付きボビンYBを個別化してからボビン搬送装置11のトレイ22に糸付きボビンYBを差し込んで装着する。ボビン搬送装置11は、糸付きボビンYBを各巻取ユニット10に搬送する。各巻取ユニット10では、トレイ22に装着された糸付きボビンYBから糸を解舒してパッケージを形成する。
各巻取ユニット10で糸が解舒されて処理済みとなった糸無しボビンBは、巻取ユニット10から排出される。排出された糸無しボビンBは、ボビン搬送装置11のトレイ22によって搬送される。糸無しボビン抜き取り装置13は、ボビン搬送装置11のトレイ22上の糸無しボビンBを抜き取る。抜き取られた糸無しボビンBは回収容器40に回収される。糸無しボビンBが抜き取られたトレイ22には、その下流側でボビン供給装置12によって新たな糸付きボビンYBが装着される。尚、各巻取ユニット10からは、非常に短い糸の残ったボビンである極少残糸付きボビンも排出されるが、前述した糸無しボビンBには、この極少残糸付きボビンも含まれている。
次に、自動ワインダー100を構成する各装置について、図1、図2、図3を用いてより詳細に説明する。
複数並設される巻取ユニット10は、それぞれトレイ22に装着された糸付きボビンYBに巻かれた糸を解舒して、巻取ボビンに巻き返すことにより、パッケージを形成するように構成される。
ボビン搬送装置11は、各巻取ユニット10に対して自動的に糸付きボビンYBを供給するとともに、糸無しボビンBを各巻取ユニット10から回収するように構成されている。ボビン搬送装置11は、ボビン搬送経路21、複数のトレイ22を備えている。ボビン搬送経路21は、コンベア等によってトレイ22を搬送する。ボビン搬送経路21上を搬送される多数のトレイ22には、糸付きボビンYBあるいは糸無しボビンBが装着される。
ボビン供給装置12は、搬送されるトレイ22のうち糸付きボビンYBが載置されていないトレイ22に対して糸付きボビンYBを供給するように構成されている。ボビン供給装置12は、ボビン投入部23、個別化部24、トレイ載置部25、ボビン移動部26を備えている。
ボビン投入部23は、コンテナ8で搬送されてきた糸付きボビンYB群が投入される部分である。
個別化部24は、ボビン投入部23に投入された糸付きボビンYB群を上昇させつつ糸付きボビンYBを個別化するように構成されている。個別化部24は、無端ベルト27、複数のボビン受け部材28を備えている。無端ベルト27は上下方向に配設されてコンベアを構成する。複数のボビン受け部材28は、無端ベルト27に取り付けられている。
ボビン受け部材28は、糸付きボビンYBを載置する面が設けられている。この面は、糸付きボビンYBを1本づつしか載置できないように構成されている。個別化部24の下部まで搬送されてきた糸付きボビンYBは、無端ベルト27が循環駆動することでボビン受け部材28の上に1本ずつ載置され、上向きに搬送される。このようにして、ボビン投入部23内の糸付きボビンYBを1本ずつ取り上げて、個別化することができる。
トレイ載置部25は、個別化部24によって上方に搬送された糸付きボビンYBを受け取り、糸付きボビンYBの解舒側の端部(天側)と支持側の端部(尻側)とを判別し、支持側端部(尻側)が下になるように回転させたうえで、ボビン搬送装置11のトレイ22に差し込んで装着する。トレイ載置部25の下方にはトレイ22が待機しており、糸付きボビンYBがトレイ22に差し込まれて装着される。トレイ載置部25の構成は公知であり、例えば持開平8−169525号公報に開示されている。
ボビン移動部26は、ボビン投入部23と個別化部24の間に配置され、ボビン投入部23から個別化部24に糸付きボビンYB群を移動させるように構成されている。ボビン移動部26は、揺動搬送部29を備えている。揺動搬送部29は、ボビン投入部23に投入された糸付きボビンYB群のうち、所定の量の糸付きボビンYBを揺動することにより個別化部24に搬送する部材である。揺動搬送部29は、個別化部24側に傾けられた姿勢(図2の状態)と、その反対側であるボビン投入部23側に傾けられた姿勢との間で揺動駆動されるように構成されている。
揺動搬送部29は、個別化部24側に傾けられた姿勢では、ボビン投入部23内の糸付きボビンYB群が個別化部24側に流入しないように堰き止めている。ボビン投入部23の糸付きボビンYBを個別化部24に搬送する場合には、まず、揺動搬送部29は、ボビン投入部23側に傾けた状態に揺動する。このとき、堰き止められていた糸付きボビンYBが、揺動搬送部29の上面に載置される。続いて、揺動搬送部29を再度揺動させ、個別化部24側に傾けた状態とする。揺動搬送部29は、一定量の糸付きボビンYBが上に乗った状態で揺動するので、揺動搬送部29に乗った糸付きボビンYBだけが、個別化部24側に導入される。このように、揺動搬送部29を揺動させることで、ボビン投入部23の糸付きボビンYB群から、所定量の糸付きボビンYBのみが個別化部24へと搬送される。
ボビン抜き取り装置13は、ボビン搬送装置11に搬送されるトレイ22のうち、巻取ユニット10から排出された糸無しボビンBが載置されたトレイ22から糸無しボビンBを抜き取る装置である。ボビン抜取り装置23は、フレーム31、プローベルト32、抜取りレバー33、残糸付きボビンシュート部35、糸無しボビンシュート部36、残糸検出センサ(図示せず)を備えている。尚、巻取ユニット10から排出された糸無しボビンBの中には、若干糸が残っているボビン(残糸付きボビン)が混在している。
フレーム31は、ボビン抜き取り装置13の基体を構成するものである。プローベルト32は、糸無しボビンBを搬送する手段である。プローベルト32は、無端ベルトであり、上下方向に向けて配置されている。抜取りレバー33は、フレーム31に揺動自在に設けられたアームである。抜取りレバー33の先端には抜出しプーリ34が設けられている。抜取りレバー33は、抜出しプーリ34を搬送経路上のトレイ22上の糸無しボビンBに当ててプローベルト32側へ移動させ、糸無しボビンBをトレイ22より上方に抜き取ってプローベルト32へと送る。
残糸検出センサ(図示せず)は、プローベルト32に沿って上側へ搬送される糸無しボビンBのうち、残糸付きボビンを検出する検出手段である。残糸検出センサは、プローベルト32による搬送経路の途中に配置される。残糸付きボビンシュート部35及び糸無しボビンシュート部36は、プローベルト32による糸無しボビンBの搬送経路上に配置されている。
残糸検出センサで残糸が検出された糸無しボビンBは、残糸付きボビンシュート部35に排出される。残糸付きボビンシュート部35は傾斜しており、残糸付きの糸無しボビンBを滑らせて、残糸付きの糸無しボビンB用の回収容器(図示せず)に投入する。
残糸のない糸無しボビンBは、糸無しボビンシュート部36に排出される。糸無しボビンシュート部36も傾斜しており、残糸のない糸無しボビンBを滑らせて、回収容器40に投入する。ボビン抜き取り装置13では、糸無しボビンBは、解舒側の端部(天側)を上にした状態でトレイ22より抜き取られている。このため、残糸のない糸無しボビンBは、そのまま解舒側の端部(天側)を前にした姿勢で糸無しボビンシュート部36から回収容器40に投入される。
糸無しボビンシュート部36は、ボビン抜き取り装置13から回収容器40に向けて配置されている。本実施例では、回収容器40は2本設置されているため、糸無しボビンシュート部36の先端部は、両方の回収容器40に糸無しボビンBを投入できるよう、幅広に形成されている。
糸無しボビンシュート部36の先端付近には、セパレータ37が設置されている。セパレータ37は、糸無しボビンBを案内する方向を切り換えることで、糸無しボビンBの投入先となる回収容器40を2本の回収容器40の間で切り換えるものである。セパレータ37は、駆動源38により切り換えが可能である。
2本の回収容器40は、本実施例では、ボビン移動部26の上部に設置された容器設置部43に並べて設置されている。容器設置部43は、回収容器40を設置するための部材である。本実施例では、容器設置部43は、ボビン移動部26の揺動搬送部29の上方に跨るように設置されている。
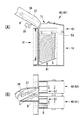
次に、図4から図10を用いて、本発明の特徴部分である回収容器40の構成についてより詳細に説明する。図4に示すように、本実施例では、2本の回収容器40が並べて設置されている。以下の説明では、便宜的に一方の回収容器40を第1回収容器41とし、他方の回収容器40を第2回収容器42とする。第1回収容器41と第2回収容器42は対称形である。以下、主として第1回収容器41について説明する。
また、糸無しボビンシュート部36から糸無しボビンBが投入される側を、便宜的に回収容器40の糸無しボビン投入側とする。
第1回収容器41の構成について説明する。図4、図5に示すように、第1回収容器41は、容器本体51、蓋部61、受け部81、支持部91を備えている。
容器本体51は、糸無しボビンBを収容する部分である。容器本体51は、上部が開口しており、水平方向の断面形状が略長方形となる側壁を有する容器である。容器本体51は、取り出し補助部52、検知部53を備えている。
容器本体51の短辺側の側壁は、対向する一対の第1側壁54で構成されている。長辺側の側壁は、対向する1対の第2側壁55で構成されている。第1側壁54の幅(容器本体51の短辺の長さ)は、糸無しボビンBの長さよりも短く設定されている。第2側壁55の幅(容器本体51の長辺の長さ)は、糸無しボビンBの長さよりも長く設定されている。
容器本体51の内側には、第1側壁54と平行に第1内壁板56が配置される。第1内壁板56は、糸無しボビン投入側の第1側壁54との間に糸無しボビンBを収容するための収容部57を構成する。第1内壁板56が配置されるのは、糸無しボビン投入側の反対側である。収容部57の内部で糸無しボビンBが回転して天尻方向が変わらないよう、収容部57の長辺側の長さは、糸無しボビンBの長さと同じか、やや長くなる程度となるように第1内壁板56の位置が設定されている。
取り出し補助部52は、オペレータが第1回収容器41から糸無しボビンBを取り出す際、オペレータが手を差し込んで糸無しボビンBを持ち上げやすくするためのものである。取り出し補助部52は、容器本体51の長辺側の側壁である第2側壁55に設けられている。取り出し補助部52は、上部が開放端であり、かつ糸無しボビンBの長さより短い幅の切り欠きである。尚、取り出し補助部52は第2側壁55に設けられているため、オペレータは、糸無しボビンB群の横から手を差し込むことができる。
検知部53は、収容部57に収容される糸無しボビンBの上面位置を検出するものである。本実施例では、検知部53として、発光部と受光部からなる光電センサが用いられている。検知部53は、容器本体51の第2側壁55に設けられる。一対の第2側壁55の対向する位置に、それぞれ貫通孔を形成し、容器本体51の外部に検知部53の発光部と受光部が装着される。
検知部53は、収容部57に糸無しボビンBが回収されて満杯となり、糸無しボビンBの上面が発光部からの光を遮ると、受光部がそれを検知し、検知信号を自動ワインダー100に設けられた制御部(図示せず)に送信するように構成される。制御部は、検知部53からの検知信号に基づいて、ランプ等の報知部を作動させ、オペレータに糸無しボビンが所定量回収されたことを報知する。また、制御部は、検知部53からの検知信号に基づいて、セパレータ37の駆動源38を作動させ、糸無しボビンBを案内する方向を切り換えることで、糸無しボビンBの投入先を回収容器41と回収容器42との間で切り換える。
蓋部61は、糸無しボビンシュート部36から投入される糸無しボビンBを、容器本体51の収容部57に案内するとともに、回収された糸無しボビンBを収容部57から取り出しやすくするための部材である。蓋部61は、蓋部本体63、開口部67、規制部71、遮蔽部75を備えている。
蓋部本体63は、容器本体51に対して軸76で回動自在に支持されており、容器本体51に対して開閉自在に構成されている。軸76は、糸無しボビン投入側の反対側に設けられている。蓋部本体63は、第1側部規制板64、第2側部規制板65、天板66から構成されている。第1側部規制板64は、蓋部本体63の短辺側の側壁を構成する。第1側部規制板64は、糸無しボビン投入側の反対側(軸76側)のみに設けられる。第1側部規制板64の幅は、容器本体51の第1側壁54の幅と略同一の幅を有する。
第2側部規制板65は、投入される糸無しボビンBが飛び出すのを防止するための部材である。第2側部規制板65は蓋部本体63の長辺側の側壁を構成するが、第2側部規制板65の幅(長辺の長さ)は、容器本体51の第2側壁55の幅(長辺の長さ)よりもやや短く設定されている。これは、本実施例では、糸無しボビンBが、糸無しボビンシュート部36から第1回収容器41に対してやや斜め方向から投入されるため、投入される糸無しボビンBと第2側部規制板65が干渉するのを防止するためである(図7B参照)。
天板66は、蓋部本体63の上部を構成する。天板66は、第1側部規制板64と第2側部規制板65の上部に跨るように設置される。
開口部67は、収容部51の上方に形成されて、糸無しボビンBが投入される部分である。開口部67は、糸無しボビンシュート部36から糸無しボビンBを投入しやすいよう、糸無しボビン投入側に設けられる。開口部67は、容器本体51の第1側壁54、蓋部本体63の第2側部規制板65、及び天板66で囲まれて構成される。
図4、図5、図6に示すように、規制部71は、開口部67と収容部51との間に設置される部材である。規制部71は、開口部67に投入される糸無しボビンBの天尻方向を維持しつつ、糸無しボビンBを収容部51に案内する部材である。規制部71は、蓋部本体63の内側にボルトで固定される。規制部71は、第1内部規制板72、第2内部規制板73、傾斜板74から構成される。
第1内部規制板72は、開口部67に投入される糸無しボビンBの天尻方向を維持しつつ、糸無しボビンBを開口部67の一方に案内するための部材である。第1内部規制板72は、糸無しボビンシュート部36から投入される糸無しボビンBを確実に案内できるよう、開口部67に突き出すように設置される。第2内部規制板73は、第1内部規制板72の糸無しボビン投入側とは反対側の端部に設けられる。
傾斜板74は、開口部67に投入される糸無しボビンBの天尻方向を維持しつつ、糸無しボビンBを収容部57に案内するための部材である。傾斜板74は、第1内部規制板72に連続して設置されており、糸無しボビンBが蓋部本体63の第2側部規制板65に向けて転がるように傾斜が付けられている。傾斜板74は、自由端部と蓋部本体63の第2側部規制板65との間にスリット状の開口を形成するように設けられている。このスリット状の開口は通過口77となる。つまり、傾斜板74は、通過口77を形成するとともに、投入された糸無しボビンBを通過口77に案内する。
図5、図6に示すように、通過口77の短辺の幅をW、長辺の長さをLとすると、短辺の幅Wは、糸無しボビンBの長さよりも短く、かつ、糸無しボビンBの太さよりもやや長く設定されている。また、長辺の長さLは、糸無しボビンBの長さよりも長く設定されている。この通過口77を糸無しボビンBが通過することにより、糸無しボビンBは、天尻方向を揃えて収容部51に案内され、収容される。規制部71は、蓋部本体63に対する固定位置を調整することにより、糸無しボビンBの種類に応じて通過口77の短辺の幅Wを調整することが可能である。
尚、本実施例では、通過口77の長辺の方向が、回収容器41の長辺の方向に沿うように形成されている。また、回収容器41の長辺の方向は、投入される糸無しボビンBの投入方向(天尻方向)に略沿う方向である。つまり、回収容器41が設置される方向は、通過口77の長辺が、投入される糸無しボビンBの投入方向に略沿う方向となっている。このため、天側を前にして投入される糸無しボビンBは、天尻方向を変えることなく規制部71によって通過口77に案内される。そして、糸無しボビンBは、通過口77を通過することで、投入される際の天尻方向を維持したまま、収容部51に案内され、収容される。
遮蔽部75は、容器本体51に対して蓋部61を閉じた状態において、取り出し補助部52を覆う部分である。遮蔽部75は、第2側部規制板65の下端に延設されている。遮蔽部75は、容器本体51に対して蓋部61を閉じた状態において、取り出し補助部52の切り欠き部分に嵌合するため、取り出し補助部52及び遮蔽部75の形状は、容器本体51に対して蓋部61を開閉する際に互いに干渉しない形状とされている(図10参照)。
受け部81は、収容部51の内部において、上下方向に移動可能に配置され、回収された糸無しボビンBを支持する部材である。受け部81は、受け部本体82、腕部83、台部84を備えている。
受け部本体82は、回収された糸無しボビンBが載置される部材である。受け部本体82は、糸無しボビン投入側が低く、反対側が高くなるように傾斜を付けて配置される。これは、天側を先にして投入される糸無しボビンBがテーパー状であり、糸無しボビンBが受け部本体82の上に蓄積していくにつれて尻側が高くなるため、糸無しボビンBが収容部51の満杯位置まで回収されたときに上面が略水平になるようにするためである。
受け部本体82には、2本の腕部83が接続される。腕部83が接続される位置は、受け部本体82の糸無しボビン投入側であって、短辺の両端部分である。容器本体51の第1側壁54及び後述する支持部91のフレーム92にはそれぞれ2本の平行なスリット85が形成されており、受け部本体82の2本の腕部83は、この2本のスリット85を貫通するように設けられる。2本の腕部83の受け部本体82とは反対側には、台部84が接続される。このような構成により、受け部81は、収容部51の内部において、上下方向に移動可能となっている。
図4、図5に示すように、支持部91は、受け部81に支持される糸無しボビンBが増加すると受け部81を下降させ、受け部81に支持される糸無しボビンBが減少すると受け部81を上昇させる機構である。
受け部81をこのような支持部91で支持するのは、例えば、受け部81が回収容器40の底部に固定されると、回収された糸無しボビンBが少ない状態では、回収容器40の開口部67から底部までの糸無しボビンBの落下高さが高くなり、糸無しボビンBが回転して、天尻方向が変わるおそれがあるためである。このため、受け部81は、回収された糸無しボビンBが少ない状態では収容部51の上部付近に位置し、回収された糸無しボビンBが多くなるにつれて収容部51の下部付近に移動するように、支持部91によって支持される。
支持部91の構成について説明する。支持部91は、フレーム92、案内部93、付勢部94を備えている。フレーム92は、支持部91の基体であるとともに、容器本体51に接続されている。フレーム92は、第1回収容器41、第2回収容器42に共通の部材である。容器本体51の第1側壁54及びフレーム92には、上述のように2本の平行なスリット85が形成されている。
案内部93は、受け部81が上下方向に移動する際に、受け部81の姿勢を保持する部材である。案内部93は、摺動部95と案内軸96とを備える。摺動部95は、受け部81の台部84に固定されている。摺動部95は、上下方向に貫通孔が形成されており、台部84にも同様の貫通孔が形成されている。案内軸96は、摺動部95及び台部84の貫通孔に摺動自在に挿通される軸である。案内軸96の上下端部は、フレーム92に固定される。これにより、受け部81は案内軸96に沿って上下方向に移動可能に構成される。
付勢部94は、受け部81を上方向に付勢する部材である。本実施例では付勢部94としてバネを用いている。付勢部94のバネは、糸無しボビンBが増加すると受け部81を下降させ、受け部81に支持される糸無しボビンBが減少すると受け部81を上昇させるようにバネ係数が設定される。具体的には、糸無しボビンBが投入されて糸無しボビンBが増加する場合には、受け部81に支持される糸無しボビンBの上面が略一定の高さとなるように設定される。本実施例では、後述する検知部53のやや下方の高さで略一定に保持するように設定される。また、オペレータが糸無しボビンBを回収容器41から取り出す場合には、オペレータが糸無しボビンBを取り出し易いように、糸無しボビンBを取り出した分だけ、受け部81に支持される糸無しボビンBの上面が持ち上がるように設定される。
以上が回収容器40の構成であり、次に回収容器40によって糸無しボビンBが回収される場合について図7から図10を用いて説明する。
まず、図7は、第1回収容器41に糸無しボビンBが投入され始めた状態を示している。図7Bに示すように、糸無しボビンシュート部36のセパレータ37は、糸無しボビンBを案内する方向が第1回収容器41となるように切り替えられている。
図8は、糸無しボビンBが投入されて収容部51に回収された糸無しボビンBが増加している状態を示している。このように、収容部51に回収された糸無しボビンBが増加すると、これに従って受け部81が下降し、受け部81に支持される糸無しボビンBの上面が略一定の高さに維持される。本実施例では、糸無しボビンBの上面が検知部53のやや下方の高さで略一定となるように設定されている。
図9は、収容部57に糸無しボビンBが回収されて満杯となっている状態を示している。この状態では、糸無しボビンBの上面が検知部53の発光部からの光を遮るため、受光部がそれを検知し、検知信号を自動ワインダー100に設けられた制御部(図示せず)に送信する。制御部は、検知部53からの検知信号に基づいて、ランプ等の報知部を作動させ、オペレータに糸無しボビンが所定量回収されたことを報知する。また、制御部は、検知部53からの検知信号に基づいて、セパレータ37の駆動源38を作動させ、糸無しボビンBを案内する方向を切り換えることで、糸無しボビンBの投入先を第1回収容器41から第2回収容器42に切り換える(図9B)。
図10は、オペレータが第1回収容器41から糸無しボビンBを取り出すため、蓋部61を開放した状態を示している。蓋部61を開放すると、遮蔽部75で隠れていた取り出し補助部52が露出する。このため、オペレータは、取り出し補助部52から手を差し込んで糸無しボビンBを持ち上げることができる。オペレータが糸無しボビンBを取り出すと、その分だけ受け部81が上昇し、受け部81に支持される糸無しボビンBの上面が持ち上がる。
以上説明した本実施例に係る回収容器40によれば、次のような効果を有する。
回収容器40は、開口部67と収容部51との間に設置され、開口部67に投入される糸無しボビンBの天尻方向を維持しつつ、糸無しボビンBを収容部51に案内する規制部71を備える。このため、天尻方向を揃えた状態で投入される糸無しボビンBを、天尻方向が不規則な状態にしてしまうことがない。このため、糸無しボビンBを精紡機に戻す前に行っていた、糸無しボビンBの天尻方向を揃えるボビン整理作業を不要とすることができる。
回収容器40の規制部71は、短辺が糸無しボビンBの長さよりも短く、長辺が糸無しボビンBの長さよりも長い通過口77に糸無しボビンBを通過させることにより、糸無しボビンBの天尻方向を維持する。このため、開口部54に投入される糸無しボビンBの天尻方向を確実に維持しつつ、糸無しボビンBを収容部51に案内することができる。
回収容器40の蓋部61には、開口部67及び規制部71が設けられており、規制部71は、蓋部61の内壁との間に通過口77を形成し、かつ、投入された糸無しボビンBを通過口77に案内する傾斜板74を備える。このため、蓋部61を開放することで、規制部71も移動させることができ、容器本体51の収容部51に収容されている糸無しボビンBの取り出しが容易となる。
回収容器40の収容部51は、上部が開放端であり、かつ糸無しボビンBの長さより短い幅の切り欠きである取り出し補助部52を備える。オペレータが回収容器40から糸無しボビンBを取り出す際、収容部51の横の取り出し補助部52から手を差し込んで糸無しボビンBを持ち上げればよい。このため、収容部51の上方から糸無しボビンBを取り出す場合と比較して、糸無しボビンBの取り出し作業を効率よく行うことができる。また、蓋部61は、取り出し補助部52を覆う遮蔽部75を備えるため、蓋部61を閉じた状態で取り出し補助部52から糸無しボビンBが落下するおそれがない。
回収された糸無しボビンBを支持する受け部81は、回収された糸無しボビンBが増加してくると下降し、回収された糸無しボビンBが減少すると上昇する。このため、回収された糸無しボビンBが少ない状態であっても、開口部67から投入された糸無しボビンBの落下高さを低く抑えることができ、回収容器40の内部で糸無しボビンBが回転し、天尻方向が変わることを防止することができる。
また、オペレータが回収容器40から糸無しボビンBを取り出す際、受け部81に支持される糸無しボビンBが減少していくと、それに従って受け部81が上昇するため、糸無しボビンBの量が少なくなっても糸無しボビンBの取り出しが容易である。
また、オペレータが回収容器40から糸無しボビンBを取り出す際、受け部81に支持される糸無しボビンBが減少していくと、それに従って受け部81が上昇するため、糸無しボビンBの量が少なくなっても糸無しボビンBの取り出しが容易である。
回収された糸無しボビンBが載置される受け部本体82は、糸無しボビンBが収容部51の満杯位置まで回収されたときに上面が略水平になるように傾斜を付けて配置される。このため、天尻方向を揃えた状態で投入される糸無しボビンBを効率よく収容することができる。
回収容器40は、糸無しボビンBが所定量回収されたことを検知する検知部53を備える。このため、回収容器40に糸無しボビンBが所定量回収されたことを検知することができる。
回収容器40が自動ワインダー100に設置される方向は、通過口77の長辺が、投入される糸無しボビンBの投入方向に沿う方向である。このため、天尻方向を揃えた状態で投入される糸無しボビンBが方向を変えずに通過口77を通過しやすく、速やかに回収容器40に収容していくことができる。
以上、本発明の実施例について説明したが、本発明は上記実施例に限定されるものではなく、様々な変更が可能である。
例えば、支持部91には、付勢部94としてバネを用いたが、エアシリンダ等のアクチュエータを用いることができる。例えば、検知部53の検知信号に基づいて、アクチュエータを駆動させることで、糸無しボビンBが増加すると受け部81を下降させ、受け部81に支持される糸無しボビンBが減少すると受け部81を上昇させるようにすることができる。アクチュエータを用いた場合には、バネと比較してより正確に受け部81の位置を制御することができる。
本実施例では、回収容器40をボビン供給装置12の一部の上方に重ねて配置した。この場合、縦方向(鉛直方向)のスペースを有効活用することができ、自動ワインダー100の横方向(水平方向)の省スペース化を図ることができる。しかしながら、回収容器40の設置場所はこの位置に限定されない。例えば、ボビン抜き取り装置13に近い位置でもよく、反対に、ボビン投入部23に近い位置に設置してもよい。
100 自動ワインダー
10 巻取ユニット
11 ボビン搬送装置
12 ボビン供給装置
13 ボビン抜き取り装置
21 ボビン搬送経路
23 ボビン投入部
24 個別化部
25 トレイ載置部
26 ボビン移動部
29 揺動搬送部
35 残糸付きボビンシュート部
36 糸無しボビンシュート部
37 セパレータ
38 駆動源
43 容器設置部
40 回収容器
41 第1回収容器
42 第2回収容器
51 容器本体
52 取り出し補助部
53 検知部
57 収容部
61 蓋部
63 蓋部本体
64 第1側部規制板
65 第2側部規制板
67 開口部
71 規制部
72 第1内部規制板
73 第2内部規制板
74 傾斜板
75 遮蔽部
77 通過口
81 受け部
82 受け部本体
83 腕部
84 台部
85 スリット
91 支持部
92 フレーム
93 案内部
94 付勢部
YB 糸付きボビン
B 糸無しボビン
10 巻取ユニット
11 ボビン搬送装置
12 ボビン供給装置
13 ボビン抜き取り装置
21 ボビン搬送経路
23 ボビン投入部
24 個別化部
25 トレイ載置部
26 ボビン移動部
29 揺動搬送部
35 残糸付きボビンシュート部
36 糸無しボビンシュート部
37 セパレータ
38 駆動源
43 容器設置部
40 回収容器
41 第1回収容器
42 第2回収容器
51 容器本体
52 取り出し補助部
53 検知部
57 収容部
61 蓋部
63 蓋部本体
64 第1側部規制板
65 第2側部規制板
67 開口部
71 規制部
72 第1内部規制板
73 第2内部規制板
74 傾斜板
75 遮蔽部
77 通過口
81 受け部
82 受け部本体
83 腕部
84 台部
85 スリット
91 支持部
92 フレーム
93 案内部
94 付勢部
YB 糸付きボビン
B 糸無しボビン
Claims (8)
- 天尻方向を揃えた状態で糸無しボビンが投入される、糸無しボビンの回収容器であって、
投入された糸無しボビンを収容する収容部を備える容器本体と、
前記収容部の上方に形成される開口部と、
前記開口部と前記収容部との間に設置され、前記開口部に投入される糸無しボビンの天尻方向を維持しつつ、糸無しボビンを前記収容部に案内する規制部と、
を備える回収容器。 - 請求項1に記載の回収容器であって、
前記規制部は、短辺が糸無しボビンの長さよりも短く、長辺が糸無しボビンの長さよりも長い通過口に糸無しボビンを通過させることにより、糸無しボビンの天尻方向を維持する回収容器。 - 請求項2に記載の回収容器であって、
前記容器本体に対して開閉自在の蓋部を備え、
前記蓋部には、前記開口部及び前記規制部が設けられており、
前記規制部は、前記蓋部の内壁との間に前記通過口を形成し、かつ、投入された糸無しボビンを前記通過口に案内する傾斜板を備える回収容器。 - 請求項3に記載の回収容器であって、
前記収容部は、
前記通過口の長辺に沿う方向の側壁に、上部が開放端であり、かつ糸無しボビンの長さより短い幅の切り欠きである取り出し補助部を備え、
前記蓋部は、前記取り出し補助部を覆う遮蔽部を備える回収容器。 - 請求項1から4のいずれか1項に記載の回収容器であって、
前記収容部の内部において、上下方向に移動可能に配置され、回収された糸無しボビンを支持する受け部と、
前記受け部に支持される糸無しボビンが増加すると前記受け部を下降させ、前記受け部に支持される糸無しボビンが減少すると前記受け部を上昇させる支持部と、を備える回収容器。 - 請求項5に記載の回収容器であって、
前記受け部は、回収された糸無しボビンが載置される受け部本体を備え、
前記受け部本体は、糸無しボビンが前記収容部の満杯位置まで回収されたときに上面が略水平になるように傾斜を付けて配置される、回収容器。 - 請求項1から6のいずれか1項に記載の回収容器であって、
糸無しボビンが所定量回収されたことを検知する検知部を備える回収容器。 - 請求項2から7のいずれか1項に記載の回収容器であって、
前記通過口の長辺が、投入される糸無しボビンの投入方向に沿う方向となるように、自動ワインダーに設置される回収容器。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2012131376A JP2013252965A (ja) | 2012-06-08 | 2012-06-08 | 回収容器 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2012131376A JP2013252965A (ja) | 2012-06-08 | 2012-06-08 | 回収容器 |
Publications (1)
| Publication Number | Publication Date |
|---|---|
| JP2013252965A true JP2013252965A (ja) | 2013-12-19 |
Family
ID=49950837
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2012131376A Pending JP2013252965A (ja) | 2012-06-08 | 2012-06-08 | 回収容器 |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP2013252965A (ja) |
Cited By (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN107287711A (zh) * | 2017-07-14 | 2017-10-24 | 经纬纺织机械股份有限公司 | 环锭细纱机集体落纱落管防倒管装置 |
| TWI668176B (zh) * | 2018-08-01 | 2019-08-11 | 日月光半導體製造股份有限公司 | 導線收集容器 |
-
2012
- 2012-06-08 JP JP2012131376A patent/JP2013252965A/ja active Pending
Cited By (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN107287711A (zh) * | 2017-07-14 | 2017-10-24 | 经纬纺织机械股份有限公司 | 环锭细纱机集体落纱落管防倒管装置 |
| TWI668176B (zh) * | 2018-08-01 | 2019-08-11 | 日月光半導體製造股份有限公司 | 導線收集容器 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP2013252964A (ja) | 自動ワインダー | |
| CN102653357B (zh) | 喂纱纱管供给装置及自动络纱机 | |
| EP2495204B1 (en) | Bobbin isolating device and automatic winder | |
| JP2013067485A (ja) | ボビン供給装置及び巻取システム | |
| KR920002549B1 (ko) | 자동 와인더로의 관사 반송공급장치 | |
| JP2013252965A (ja) | 回収容器 | |
| CN105905684A (zh) | 供纱筒管分配装置以及筒管供给系统 | |
| CN105908294A (zh) | 供纱筒管方向转换装置以及筒管供给系统 | |
| EP2738126B1 (en) | Bobbin accommodating device and automatic winder | |
| JPS6021926A (ja) | 精紡ワインダの風綿除去システム | |
| JP2005232623A (ja) | 繊維機械 | |
| JPS59230973A (ja) | 空ボビン搬送システム | |
| JP2016172615A (ja) | ボビン供給装置及びボビン準備装置 | |
| KR102205366B1 (ko) | 지엽류 처리 장치 | |
| CN204588306U (zh) | 筒管供给装置以及筒管准备装置 | |
| JP2021054599A (ja) | 切断装置、ボビン搬送装置及びボビン供給装置 | |
| KR20080073118A (ko) | 매체자동지급기의 매체이송장치 및 매체이송방법 | |
| JP4713712B2 (ja) | 硬貨包装機 | |
| JP6943433B2 (ja) | 棒金処理装置 | |
| WO2021130885A1 (ja) | 部品実装システム、テープ回収装置およびテープ回収方法 | |
| JP2019064797A (ja) | 給糸ボビン分配装置及びボビン供給システム | |
| JP7015941B2 (ja) | 紙葉類格納装置 | |
| JPH04214428A (ja) | ボビン供給・排出装置 | |
| US5137222A (en) | Cop feeding apparatus for automatic winder | |
| JP2009001349A (ja) | 繊維機械 |