JP2013032064A - 車両用制動支援装置 - Google Patents
車両用制動支援装置 Download PDFInfo
- Publication number
- JP2013032064A JP2013032064A JP2011168357A JP2011168357A JP2013032064A JP 2013032064 A JP2013032064 A JP 2013032064A JP 2011168357 A JP2011168357 A JP 2011168357A JP 2011168357 A JP2011168357 A JP 2011168357A JP 2013032064 A JP2013032064 A JP 2013032064A
- Authority
- JP
- Japan
- Prior art keywords
- braking force
- braking
- vehicle
- accelerator pedal
- value
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Granted
Links
Images














Abstract
【解決手段】車両用衝突回避制動支援装置1は、障害物との接近に関するリスクポテンシャルを算出するリスクポテンシャル演算部31と、走行路の勾配を検出する外乱推定部32と、自車両が停止中に、リスクポテンシャルに基づき自車両に付与した制動力を解除する際のその減少度合いを、リスクポテンシャル及び走行路の勾配に基づいて変更する制動力演算部40とを備える。
【選択図】図3
Description
この従来技術では、先行車両との車間距離を判断する。この従来技術では、自動制動中に先行車との車間距離が停止時の車間距離より広くなったと判断すると、自動制動の制動力を解除する。
本発明は、坂路にて自車両の停止中に自動制動の制動力を解除した際に、自車両の動作が運転者が意図しないものになることを防止することを目的とする。
本実施形態は、車両に搭載される車両用衝突回避制動支援装置である。
(構成)
図1は、車両用衝突回避制動支援装置1の構成例を示すブロック図である。
車両用衝突回避制動支援装置1は、図1に示すように、車輪速センサ2、障害物情報検出センサ3、アクセル開度センサ4、スロットル開度センサ5、シフトポジションセンサ6、コントローラ7、制動力付与装置8、及びアクセルペダル反力付与装置9を有している。
車輪速センサ2、障害物情報検出センサ3、アクセル開度センサ4、スロットル開度センサ5及びシフトポジションセンサ6は、検出した検出値(センサ値)を自車両・障害物情報取得部20に出力する。
図2は、自車両・障害物情報取得部20の構成例を示すブロック図である。
自車両・障害物情報取得部20は、図2に示すように、自車速演算部21、自車加減速度演算部22、障害物情報演算部23、アクセル開度検出部24、エンジントルク検出部25、シフトポジション検出部26、及び自車両・障害物情報出力部27を有している。
自車加速減速度演算部22は、車輪速センサ2からの車輪速センサ値に基づいて自車加減速度を算出する。そして、自車加速減速度演算部22は、算出した自車加減速度を自車両・障害物情報出力部27に出力する。
ここで、障害物情報検出センサ3は、例えばレーザーレーダやミリ波レーダ、ステレオカメラ等である。また、障害物情報は、障害物との距離、障害物との相対速度、及び障害物との相対加減速度である。例えば、障害物との相対速度については、障害物情報検出センサ3によって検出した障害物との距離を時間微分するなどの演算を行い求めても良い。また、障害物との相対加減速度については、障害物情報検出センサ3によって検出した障害物との相対速度を時間微分するなどの演算を行い求めても良い。
エンジントルク検出部25は、スロットル開度センサ5からのスロットル開度センサ値に基づいてエンジントルクを算出する。そして、エンジントルク検出部25は、算出したエンジントルクを自車両・障害物情報出力部27に出力する。
自車両・障害物情報出力部27は、自車速演算部21、自車加速減速度演算部22、障害物情報演算部23、アクセル開度検出部24、エンジントルク検出部25、及びシフトポジション検出部26からの自車両・障害物情報が入力される。そして、自車両・障害物情報出力部27は、入力された自車両・障害物情報を支援情報演算部30に出力する。
支援情報演算部30は、自車両・障害物情報取得部20からの自車両・障害物情報に基づいて支援情報を算出する。そして、支援情報演算部30は、算出した支援情報を制動力演算部40及びアクセルペダル反力演算部50に出力する。
支援情報演算部30は、図3に示すように、リスクポテンシャル演算部31、外乱推定部32、及び支援情報出力部33を有している。
リスクポテンシャル演算部31は、自車両・障害物情報取得部20からの自車両・障害物情報に基づいて、障害物との接近に関するリスクポテンシャル(接近リスクポテンシャル)を算出する。そして、リスクポテンシャル演算部31は、算出したリスクポテンシャルを支援情報出力部33に出力する。
TTC=D_tar/V_tar ・・・(1)
そして、リスクポテンシャル演算部31は、算出した到達時間TTCが小さいほど高くなり、到達時間TTCが大きいほど低くなるリスクポテンシャルの演算を行う。このようなことから、例えば、リスクポテンシャルは、到達時間TTCの逆数であっても良い。
外乱推定部32は、自車両・障害物情報取得部20からの自車両・障害物情報、及び制動力演算部40の制動力演算処理結果に基づいて外乱推定値を算出する。そして、外乱推定部32は、算出した外乱推定値を支援情報出力部33に出力する。
ここで、ARMYUは、制動力指令値演算部44が制動力指令値P_brkの算出に使用する制動量制動力変換係数である。また、予め設定した値は、例えば0.5(MPa)である。
一方、外乱推定値SUBを以上の演算で算出しない場合、外乱推定部32は、外乱推定値SUBを1に設定する。
具体的には、先ず、外乱推定部32は、シフトポジションに基づいて現在選択中の変速ギアのギア比GPを設定する。ここで、車両の変速機が無段変速機である場合には変速機の入出力回転を検出してギア比を演算して設定しても良い。
A_tar=(エンジントルク×変速ギア比×トルク比×デフギア比/車重)/タイヤ半径 ・・・(3)
ここで、エンジントルクは、自車両・障害物情報取得部20から取得した値である。また、トルク比、デフギア比、車重、及びタイヤ半径は、車両の諸元に基づいて予め設定された値である。
SUB2=A_tar−A ・・・(4)
ここで、外乱推定値SUB2は、次のような理由から道路勾配を推定する値となる。
そして、降坂路にて前進方向への駆動力を付与している場合の加速度推定値A_tarに比して前進する車両の実際の加減速度Aが大きくなると、外乱推定値SUB2は小さくなる(負値で小さい値になる)。
このようなことから、前進方向への駆動力を付与している場合において、外乱推定値SUB2が小さいほど降坂路の勾配が大きいことが推定され、外乱推定値SUB2が大きいほど登坂路の勾配が大きいことが推定される。
制動力演算部40は、支援情報演算部30からの情報に基づいて制動付与力装置8の制動力指令値を算出する。そして、制動力演算部40は、算出した制動力指令値を制動力付与装置8に出力する。
制動力演算部40は、図4に示すように、閾値設定部41、制動力付与判断部42、制動量演算部43、制動力指令値演算部44、及び制動力解除設定演算部45を有している。
閾値設定部41は、制動力付与判断を行うための閾値を設定する。そして、閾値設定部41は、設定した閾値(以下、制動力付与判断用閾値という。)を制動力付与判断部42に出力する。
ここで、具体的には、制動力付与判断部42は、支援情報演算部30から取得したリスクポテンシャルが、閾値設定部41が設定した制動力付与判断用閾値より大きい場合(リスクポテンシャル>制動力付与判断用閾値)、自車両に制動力を付与すると判断する。また、制動力付与判断部42は、それ以外の場合(リスクポテンシャル≦制動力付与判断用閾値)、自車両に制動力を付与しないと判断する。
又は、制動力付与判断部42は、本装置1によって自動制動による制動力を付与し、自車両が停止してから予め設定した時間が経過した場合に制動力を付与しないとしつつも、運転者がアクセルペダルを踏んだ場合には優先して制動力を付与しないと判断しても良い。
ここで、具体的には、制動量演算部43は、制動力付与判断部42の制動力付与判断結果に基づいて制動量を設定する。より詳しくは、制動量演算部43は、制動力付与判断部42が制動力を付与すると判断した場合(リスクポテンシャル>制動力付与判断用閾値)、予め設定した制動量(減速度)DEC_0(m/s2)を制動量(減速度)DEC(m/s2)に設定する。このとき、制動量演算部43は、DEC_0(m/s2)に至るまでの制動量DECの増加を予め設定した増加率により制限する。ここで、例えば、増加率は10.0(m/s3)であり、制動量DEC_0は5.0(m/s2)である。
制動力解除設定演算部45は、本装置1によって付与した制動力の解除の設定を行う。具体的には、制動力解除設定演算部45は、制動力を解除する際の減少を制限する減少側変化率を設定する。そして、制動力解除設定演算部45は、設定した減少側変化率を制動量演算部43に出力する。
制動力解除設定演算部45は、図5に示すように、先ずステップS1では、支援情報演算部30から支援情報を取得する。
次に、ステップS2では、制動力解除設定演算部45は、制動力付与判断部42の判断により制動力が付与されて自車両が停止した後、制動力付与判断部42が制動力を付与しない(制動力を解除する)と判断したか否かを判定する。制動力解除設定演算部45は、制動力付与判断部42の判断により制動力が付与されて自車両が停止した後、制動力付与判断部42が制動力を付与しない(制動力を解除する)と判断したと判定すると、ステップ3に進む。また、制動力解除設定演算部45は、それ以外の場合、ステップS10に進む。
図6は、外乱推定値SUB2とアクセル全閉時減少側変化率△DEC_0との関係の一例を示す特性図である。図6に示すように、外乱推定値SUB2の正値は、登坂路相当において得られる値であり、外乱推定値SUB2の負値は、降坂路相当において得られる値である。
また、アクセル全閉時減少側変化率△DEC_0は、外乱推定値SUB2がその零近傍の値よりも大きい(正値で大きい)と外乱推定値SUB2が大きいほど小さくなる。そして、アクセル全閉時減少側変化率△DEC_0は、外乱推定値SUB2が予め設定した値まで大きくなると最小値△DEC_0min(<最大値△DEC_0max)となる。
すなわち、この場合、制動力解除設定演算部45は、登坂路相当及び降坂路相当と判定すると、それ以外の場合(平坦地相当の場合)よりもアクセル全閉時減少側変化率△DEC_0を小さい値にする。
アクセル全開時減少側変化率△DEC_1は、図7に示すように、外乱推定値SUB2が零近傍(零に対して予め設定された範囲)の値の場合、予め設定された値(最小値△DEC_1min<予め設定された値<最大値△DEC_1max)となる。
また、アクセル全開時減少側変化率△DEC_1は、外乱推定値SUB2がその零近傍の値よりも小さい(負値で大きい)と外乱推定値SUB2が小さいほど小さくなる。そして、アクセル全開時減少側変化率△DEC_1は、外乱推定値SUB2が予め設定した値まで小さくなると、その値以降、最小値△DEC_1min(<△DEC_1max)となる。
また、アクセル全開時減少側変化率△DEC_1に設定される最小値△DEC_1minは、アクセル全閉時減少側変化率△DEC_0に設定される最小値△DEC_0minよりも十分小さい値である。これにより、制動力解除設定演算部45は、例えば、降坂路相当では、アクセル全開時減少側変化率△DEC_1よりもアクセル全閉時減少側変化率△DEC_0が大きくなるようにしている。
図8は、外乱推定値SUB2とアクセル開度ゲインα_0との関係の一例を示す特性図である。
アクセル開度ゲインα_0は、図8に示すように、外乱推定値SUB2が零近傍(零に対して予め設定された範囲)の値の場合、最大値α_0maxとなる。
また、アクセル開度ゲインα_0は、外乱推定値SUB2がその零近傍の値よりも小さい(負値で小さい)と外乱推定値SUB2が小さいほど小さくなる。そして、アクセル開度ゲインα_0は、外乱推定値SUB2が予め設定した値まで小さくなると、その値以降、最小値△α_0min(<最大値α_0max)となる。
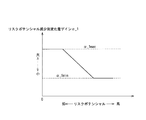
図9は、リスクポテンシャルとリスクポテンシャル減少側変化量ゲインα_1との関係の一例を示す特性図である。
△DEC=(△DEC_0×(100−α_0×θ)/100+△DEC_1×α_0×θ)×α_1 ・・・(5)
ここで、θは、前記ステップS1で支援情報として取得したアクセル開度である。
また、到達時間TTCが短いほどリスクポテンシャルが高く、さらには、リスクポテンシャルが高いほどポテンシャル減少側変化量ゲインα_1が小さいことから、到達時間TTCが短いほどポテンシャル減少側変化量ゲインα_1は小さくなる。よって、障害物との距離が短いほど到達時間TTCが短くなるから、障害物との距離が短いほど減少側変化率ΔDECは小さくなる。
次に、ステップS9では、制動力解除設定演算部45は、制動量演算部43が算出した制動量DECが零か否かを判定する。制動力解除設定演算部45は、制動量演算部43が算出した制動量DECが零であると判定すると、該図5に示す処理を終了する(前記ステップS1から再び処理を開始する)。また、制動力解除設定演算部45は、それ以外の場合、前記ステップS3から再び処理を開始する。
制動力指令値演算部44は、制動付与力装置11の制動力指令値を算出する。そして、制動力指令値演算部44は、算出した制動力指令値を支援情報演算部30及び制動付与力装置11に出力する。
P_brk=DEC×ARMYU×α_armyu1 ・・・(6)
ここで、DECは、制動量演算部43が算出した値である。また、ARMYUは、制動量制動力変換係数であり、予め設定された値である。例えば、制動量制動力変換係数ARMYUは0.811である。また、α_armyu1は、制動量制動力変換係数補正ゲインである。
アクセルペダル反力演算部50は、支援情報演算部30からの情報に基づいてアクセルペダル反力指令値を算出する。そして、アクセルペダル反力演算部50は、算出したアクセルペダル反力指令値をアクセルペダル反力付与装置9に出力する。
アクセルペダル反力演算部50は、図10に示すように、閾値設定部51、アクセルペダル反力付与判断部52、アクセルペダル反力量演算部53、及びアクセルペダル反力指令値演算部54を有している。
閾値設定部51は、アクセルペダル反力付与判断を行うための閾値を設定する。そして、閾値設定部51は、設定した閾値(以下、アクセルペダル反力付与判断用閾値という。)をアクセルペダル反力付与判断部52に出力する。
アクセルペダル反力付与判断部52はアクセルペダル反力付与の判断を行う。そして、アクセルペダル反力付与判断部52は、そのアクセルペダル反力付与の判断結果をアクセルペダル反力量演算部53に出力する。
ここで、具体的には、アクセルペダル反力量演算部53は、アクセルペダル反力付与判断部52のアクセルペダル反力付与の判断結果に基づいてアクセルペダル反力量を算出する。すなわち、アクセルペダル反力量演算部53は、アクセルペダル反力付与判断部52がアクセルペダル反力を付与すると判断した場合、アクセルペダル反力量を算出する。ここで、アクセルペダル反力量演算部53は、アクセル開度が大きいほど、すなわち、アクセルペダルの踏み込み量(アクセルペダル開度量)が多いほど、アクセルペダル反力量を大きい値にする。このとき、例えば、アクセルペダル反力量演算部53は、20(N)以上25(N)以下の範囲内でアクセルペダル反力量を算出する。
ここで、具体的には、アクセルペダル反力指令値演算部54は、アクセルペダル反力付与判断部52がアクセルペダル反力を付与すると判断した後、アクセルペダル反力量演算部53が算出したアクセルペダル反力量までアクセルペダル反力指令値を増加させる。このとき、アクセルペダル反力指令値演算部54は、予め設定した増加率でアクセルペダル反力指令値を増加させる。ここで、例えば、予め設定した増加率は7.5(N/sec)である。
それから、アクセルペダル反力付与判断部52がアクセルペダル反力を付与しないと判断した場合に、前回処理時にアクセルペダル反力指令値が零以外の値となっているときには、アクセルペダル反力指令値演算部54は、アクセルペダル反力指令値を零まで減少させる。このとき、アクセルペダル反力指令値演算部54は、予め設定した減少率でアクセルペダル反力指令値を減少させる。ここで、例えば、予め設定した減少率は30(N/sec)である。
アクセルペダル反力付与装置9は、アクセルペダル反力演算部50からのアクセルペダル反力指令値に基づいてアクセルペダルに反力を付与する。
車両用衝突回避制動支援装置1の動作の一例を説明する。
車両用衝突回避制動支援装置1は、外乱推定値に基づき設定した制動力付与判断用閾値よりも障害物とのリスクポテンシャルが大きい場合、制動付与力装置11によって自車両に自動制動による制動力の付与を行う。
そして、車両用衝突回避制動支援装置1は、次のように自動制動による制動力を解除する。
ここで、制動力を解除すると判断する場合とは、リスクポテンシャルが制動力付与判断用閾値以下となる場合、制動力を付与して自車両が停止してから予め設定した時間が経過した場合、又は制動力を付与して自車両が停止し、運転者がアクセルペダルを踏んでいない状態からアクセルペダルを踏んだ場合等である。
図11は、アクセル全閉時の道路勾配と自動制動の制動力の解除状態との関係の一例を示す図である。また、図12は、アクセル全開時の道路勾配と自動制動の制動力の解除状態との関係の一例を示す図である。また、図13は、先行車両との車間距離と自動制動の制動力の解除状態との関係の一例を示す図である。
また、図14は、登坂路で自車両100が自動制動により停車しており、自車両100の前後に他の車両201,202が存在する状態を示す図である。また、図15は、降坂路で自車両100が自動制動により停車しており、自車両100の前後に他の車両201,202が存在する状態を示す図である。
これにより、図14及び図15に示すように自車両100が坂路で停車している場合に単に制動力を解除すると、その解除は、平坦地の場合よりも遅くなる。この結果、自車両100は、坂路では平坦地の場合よりも緩やかに発進するようになる。
これにより、図15に示すように自車両100が降坂路で停車している場合にアクセルペダルが踏まれて制動力を解除すると、その解除は、平坦地又は登坂路の場合よりも遅くなる。この結果、自車両100は、アクセルペダルが踏まれている場合、降坂路では緩やかに発進するようになる。
これにより、図14及び図15に示すように先行車両201が存在する場合に自車両100が制動力を解除すると、その解除は遅くなる。この結果、自車両100は、先行車両201が存在する場合、緩やかに発進するようになる。
本実施形態は、次のような効果を奏する。
(1)外乱推定部32は、走行路の勾配を検出する。そして、制動力解除設定演算部45は、自車両が停止中に、リスクポテンシャルに基づき自車両に付与した制動力を解除する際のその減少度合いを、リスクポテンシャル及び走行路の勾配に基づいて変更する。
これにより、車両用衝突回避制動支援装置1は、坂路にて自車両の停止中に自動制動による制動力を解除した際に、自車両の動作が運転者が意図しないものになることを防止することができる。
これに対して、本実施形態の車両用衝突回避制動支援装置1は、走行路の勾配に基づいて、制動力の解除の際の減少度合いを変更することで、自車両の発進が運転者が意図しないものになってしまうことを防止できる。
また、制動力解除設定演算部45は、坂路の勾配が大きいほどアクセル全閉時減少側変化率△DEC_0を小さくする。この場合、坂路の勾配が大きいほど、減少側変化率ΔDECが小さくなるために、自動制動の制動力の解除は緩やかになる。
よって、車両用衝突回避制動支援装置1は、降坂路にて自動制動の制動力を解除した際に、自車両の加速度が大きくなってしまうことを抑制できる。
また、車両用衝突回避制動支援装置1は、アクセル全閉時減少側変化率△DEC_0に従うことで、登坂路においても自動制動の制動力の解除を緩やかに行うことができる。
以上のように、車両用衝突回避制動支援装置1は、坂路にて自動制動の制動力を解除した際に、自車両の動作が運転者が意図しないものになることを防止することができる。
このように、車両用衝突回避制動支援装置1は、坂路にて自動制動の制動力を解除した際に、自車両の動作が運転者が意図しないものになることを防止することができる。
これにより、車両用衝突回避制動支援装置1は、降坂路にて自動制動の制動力を解除した際に運転者のアクセルペダル踏み込みによる前進意図を上回る加速度になってしまうのを防止できる。
このように、車両用衝突回避制動支援装置1は、坂路にて自動制動の制動力を解除した際に、自車両の動作が運転者が意図しないものになることを防止することができる。
これにより、車両用衝突回避制動支援装置1は、デバイス等の特別な構成を新たに備えることなく走行路の勾配を検出できる。
本実施形態では、障害物への自車両の接近に関するリスクポテンシャルを障害物との距離や障害物との相対速度に基づいて算出しているが、これに限定されない。例えば、本実施形態では、運転者の注意度等の運転者に起因する情報や自速度等の自車両に起因する情報、道路の混雑度等の自車両周囲に起因する情報等に基づいてリスクポテンシャルを算出しても良い。
また、本実施形態は、自動制動の制動力の解除の設定について、自動制動によって自車両が停車した後の制動力の解除に適用されることに限らず、自動制動によって自車両が減速している最中の制動力の解除にも適用され得ることは言うまでもない。すなわち、本実施形態では、自動制動によって自車両が減速している最中の制動力を解除する際にも、自車両の動作が運転者が意図しないものになることを防止することができる等といった効果を発揮し得る。
以上、本発明の実施形態を具体的に説明したが、本発明の範囲は、図示され記載された例示的な実施形態に限定されるものではなく、本発明が目的とするものと均等な効果をもたらすすべての実施形態をも含む。さらに、本発明の範囲は、請求項1により画される発明の特徴の組み合わせに限定されるものではなく、すべての開示されたそれぞれの特徴のうち特定の特徴のあらゆる所望する組み合わせによって画されうる。
Claims (5)
- 自車両の前後方向に存在する障害物への自車両の接近リスクポテンシャルを検出する接近リスクポテンシャル検出手段と、
前記接近リスクポテンシャル検出手段が検出した接近リスクポテンシャルに基づいて、自車両に制動力を付与する制動力付与手段と、
自車両が停止しているときに、予め設定した解除条件を満たしたと判定すると、前記制動力付与手段が付与した制動力を解除する制動力解除手段と、
自車両が走行する走行路の勾配を検出する走行路勾配検出手段と、
前記接近リスクポテンシャル検出手段が検出した接近リスクポテンシャル及び前記走行路勾配検出手段が検出した走行路の勾配検出値に基づいて、前記制動力解除手段による解除の際の制動力の減少度合いを変更する変更手段と、
を備えることを特徴とする車両用制動支援装置。 - 前記変更手段は、前記接近リスクポテンシャルが高くなるほど、又は前記走行路の勾配検出値が大きくなるほど、前記解除の際の制動力の減少度合いを低くすることを特徴とする請求項1に記載した車両用制動支援装置。
- 前記変更手段は、前記走行路勾配検出手段が上り勾配を検出すると、アクセルペダルが踏まれている場合よりもアクセルペダルが踏まれていない場合の前記解除の際の制動力の減少度合いを低くすることを特徴とする請求項1又は請求項2に記載した車両用制動支援装置。
- 前記変更手段は、前記走行路勾配検出手段が下り勾配を検出すると、アクセルペダルが踏まれていない場合よりもアクセルペダルが踏まれている場合の前記解除の際の制動力の減少度合いを低くすることを特徴とする請求項1〜請求項3のいずれか1項に記載した車両用制動支援装置。
- 自車両の車輪速を検出する車輪速検出手段と、
運転者の操作によるアクセルペダルの開度量を検出するアクセルペダル開度量検出手段と、をさらに備え、
前記走行路勾配検出手段は、前記車輪速検出手段が検出した車輪速に基づいて、自車両の加速度である第一加速度推定値を算出し、前記アクセルペダル開度量に基づいて、エンジントルクを算出し、該エンジントルク及び予め設定された車両諸元から第二加速度推定値を算出し、前記第一加速度推定値及び前記第二加速度推定値から走行路の勾配を検出することを特徴とする請求項1〜請求項4のいずれか1項に記載した車両用制動支援装置。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2011168357A JP5957822B2 (ja) | 2011-08-01 | 2011-08-01 | 車両用制動支援装置 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2011168357A JP5957822B2 (ja) | 2011-08-01 | 2011-08-01 | 車両用制動支援装置 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2013032064A true JP2013032064A (ja) | 2013-02-14 |
| JP5957822B2 JP5957822B2 (ja) | 2016-07-27 |
Family
ID=47788332
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2011168357A Expired - Fee Related JP5957822B2 (ja) | 2011-08-01 | 2011-08-01 | 車両用制動支援装置 |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP5957822B2 (ja) |
Cited By (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN112937581A (zh) * | 2019-12-11 | 2021-06-11 | 奥迪股份公司 | 车辆驾驶辅助系统、包括其的车辆及相应的方法和介质 |
| JP2022105528A (ja) * | 2018-08-30 | 2022-07-14 | トヨタ自動車株式会社 | 制御装置、マネージャ、システム、制御方法及び車両 |
| JP2022105527A (ja) * | 2018-08-30 | 2022-07-14 | トヨタ自動車株式会社 | 制御装置、マネージャ、システム、制御方法及び車両 |
Families Citing this family (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2022091537A (ja) * | 2020-12-09 | 2022-06-21 | トヨタ自動車株式会社 | 運転支援装置 |
Citations (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH068808A (ja) * | 1992-06-26 | 1994-01-18 | Hino Motors Ltd | 自動車の坂道発進補助装置 |
| JPH10236290A (ja) * | 1997-02-24 | 1998-09-08 | Mitsubishi Motors Corp | 車両の制動制御装置 |
| JP2000006691A (ja) * | 1998-06-25 | 2000-01-11 | Nissan Motor Co Ltd | 制駆動力制御装置 |
| JP2005022437A (ja) * | 2003-06-30 | 2005-01-27 | Daihatsu Motor Co Ltd | 発進制御方法及び発進制御装置 |
| JP2006306273A (ja) * | 2005-04-28 | 2006-11-09 | Nissan Motor Co Ltd | 自動制動装置 |
-
2011
- 2011-08-01 JP JP2011168357A patent/JP5957822B2/ja not_active Expired - Fee Related
Patent Citations (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH068808A (ja) * | 1992-06-26 | 1994-01-18 | Hino Motors Ltd | 自動車の坂道発進補助装置 |
| JPH10236290A (ja) * | 1997-02-24 | 1998-09-08 | Mitsubishi Motors Corp | 車両の制動制御装置 |
| JP2000006691A (ja) * | 1998-06-25 | 2000-01-11 | Nissan Motor Co Ltd | 制駆動力制御装置 |
| JP2005022437A (ja) * | 2003-06-30 | 2005-01-27 | Daihatsu Motor Co Ltd | 発進制御方法及び発進制御装置 |
| JP2006306273A (ja) * | 2005-04-28 | 2006-11-09 | Nissan Motor Co Ltd | 自動制動装置 |
Cited By (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2022105528A (ja) * | 2018-08-30 | 2022-07-14 | トヨタ自動車株式会社 | 制御装置、マネージャ、システム、制御方法及び車両 |
| JP2022105527A (ja) * | 2018-08-30 | 2022-07-14 | トヨタ自動車株式会社 | 制御装置、マネージャ、システム、制御方法及び車両 |
| JP7243895B2 (ja) | 2018-08-30 | 2023-03-22 | トヨタ自動車株式会社 | 制御装置、マネージャ、システム、制御方法及び車両 |
| JP7243894B2 (ja) | 2018-08-30 | 2023-03-22 | トヨタ自動車株式会社 | 制御装置、マネージャ、システム、制御方法及び車両 |
| CN112937581A (zh) * | 2019-12-11 | 2021-06-11 | 奥迪股份公司 | 车辆驾驶辅助系统、包括其的车辆及相应的方法和介质 |
Also Published As
| Publication number | Publication date |
|---|---|
| JP5957822B2 (ja) | 2016-07-27 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP4645598B2 (ja) | 車両用ブレーキ制御装置 | |
| US8103424B2 (en) | Inter-vehicle distance control apparatus and method for controlling inter-vehicle distance | |
| JP2013248925A (ja) | 車両制御装置 | |
| JP2016215745A (ja) | 車両の制御装置 | |
| US8996275B2 (en) | Control device for vehicle | |
| JP6658565B2 (ja) | 運転支援装置 | |
| JP6304082B2 (ja) | 車両の制御装置 | |
| JP5731845B2 (ja) | 自動制動装置 | |
| JP5957822B2 (ja) | 車両用制動支援装置 | |
| JP2016111759A (ja) | 制駆動力制御装置及び制駆動力制御方法 | |
| JP2006200526A (ja) | 車両の出力特性制御装置 | |
| JP2022137732A (ja) | 車両の走行制御装置 | |
| JP2008037152A (ja) | 車両の駆動力制御装置 | |
| JP2007069727A (ja) | 走行制御装置 | |
| JP2010215171A (ja) | 定速走行制御装置 | |
| JP4797466B2 (ja) | 先行車追従制御装置 | |
| JP6313834B2 (ja) | 車両制御装置 | |
| JP2005263215A (ja) | 減速制御装置 | |
| US11279330B2 (en) | Braking force control apparatus for a vehicle | |
| JP6245076B2 (ja) | 車両用加速度センサの出力補正装置 | |
| JP2000219113A (ja) | 車両制動制御装置 | |
| JP2005297900A (ja) | 車速制御装置 | |
| JP2015030314A (ja) | 車両制御装置 | |
| JP5862068B2 (ja) | 車両用運転支援装置 | |
| US20190381979A1 (en) | Braking control device for vehicle |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20140625 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20150212 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20150217 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20150420 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20151013 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20151210 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20160524 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20160606 |
|
| R151 | Written notification of patent or utility model registration |
Ref document number: 5957822 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R151 |
|
| LAPS | Cancellation because of no payment of annual fees |