JP2005297900A - 車速制御装置 - Google Patents
車速制御装置 Download PDFInfo
- Publication number
- JP2005297900A JP2005297900A JP2004120301A JP2004120301A JP2005297900A JP 2005297900 A JP2005297900 A JP 2005297900A JP 2004120301 A JP2004120301 A JP 2004120301A JP 2004120301 A JP2004120301 A JP 2004120301A JP 2005297900 A JP2005297900 A JP 2005297900A
- Authority
- JP
- Japan
- Prior art keywords
- vehicle
- vehicle speed
- target deceleration
- speed control
- state
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Pending
Links
Images











Landscapes
- Control Of Vehicle Engines Or Engines For Specific Uses (AREA)
- Control Of Driving Devices And Active Controlling Of Vehicle (AREA)
- Controls For Constant Speed Travelling (AREA)
Abstract
【課題】運転者の意図しない制御を排し、運転者の負荷を軽減可能な車速制御装置を提供する。
【解決手段】車両の操作状態を検出する操作状態検出手段(2,5)と、操作状態に基づいて、車両の目標減速度を設定する目標減速度設定手段(31)と、車両が走行している路面の勾配を検出する路面勾配検出手段(4)と、車両の走行状態を検出する車両走行状態検出手段(3,4)と、路面勾配が降坂路であって、車両操作状態が制動操作頻度の高い状態のときには目標減速度が大きくなるように補正するが、車両走行状態検出手段で検出した車両の走行状態によっては目標減速度の補正を中止する目標減速度補正手段(30)と、目標減速度に基づいて車速を制御する車速制御手段(40〜60)と、を有することを特徴とする。
【選択図】図1
【解決手段】車両の操作状態を検出する操作状態検出手段(2,5)と、操作状態に基づいて、車両の目標減速度を設定する目標減速度設定手段(31)と、車両が走行している路面の勾配を検出する路面勾配検出手段(4)と、車両の走行状態を検出する車両走行状態検出手段(3,4)と、路面勾配が降坂路であって、車両操作状態が制動操作頻度の高い状態のときには目標減速度が大きくなるように補正するが、車両走行状態検出手段で検出した車両の走行状態によっては目標減速度の補正を中止する目標減速度補正手段(30)と、目標減速度に基づいて車速を制御する車速制御手段(40〜60)と、を有することを特徴とする。
【選択図】図1
Description
本発明は、運転者の意図する車速に車両を制御する車速制御装置に関するものである。
運転者の負担軽減を目的として、車速指令信号に基づいてスロットル開度、変速比等を制御して車速を制御する車速制御装置が従来より種々提案されている。
例えば、特許文献1では、降坂路走行時のアクセル操作及びブレーキ操作の操作割合を検出して、アクセル操作割合が所定値以上、すなわち、降坂路走行であるにもかかわらずアクセルペダルを踏み込んでいる時間割合が大きいときには、エンジンブレーキが過剰な状態であると判定し、学習補正手段によって目標加速度を増大補正(減速度が小さくなる方向に補正)する。またブレーキ操作割合が所定値以上、すなわち、アクセルペダルを踏み込んでいる時間割合が小さく、ブレーキペダルを踏んで減速している時間割合が大きいときには、エンジンブレーキが不足している状態であると判定し、学習補正手段により目標加速度を減少補正(減速度が大きくなる方向に補正)する。
特開2001−141048号公報
しかし、前述した従来の車速制御装置は、降坂路走行時にブレーキ操作割合が所定値以上と判断された場合には、学習補正手段によって目標駆動力(目標加減速度)を減少側に補正するというものである。
そのため、例えば、降坂路走行時に先行車がブレーキ操作を繰り返して減速したために、それに合わせてブレーキペダル踏み込み操作が繰り返されたような場合であっても、従来の車速制御装置では目標駆動力が減少側に補正されてしまってエンジンブレーキが強められてしまう。その結果、運転者の意図(好み)に反して制御されてしまうので、かえって運転者の負荷が増加してしまう。
また、カーブが連続している降坂路を走行するときに、カーブのたびにブレーキペダル踏み込み操作が繰り返されたような場合であっても、従来の車速制御装置では目標駆動力が減少側に補正されてしまってエンジンブレーキが強められてしまう。その結果、運転者の意図に反して制御されてしまうので、直線路走行に戻ったときに運転負荷が増えてしまう。
さらに、信号機が連続する降坂路を走行するときに、信号機のたびにブレーキペダル踏み込み操作が繰り返されたような場合であっても、従来の車速制御装置では目標駆動力が減少側に補正されてしまってエンジンブレーキが強められてしまう。その結果、運転者の意図に反して制御されてしまうので、かえって運転者の負荷が増加してしまう。
さらにまた、隣接する車線と合流する降坂路を走行するときに、ブレーキペダル踏み込み操作が繰り返されたような場合であっても、従来の車速制御装置では目標駆動力が減少側に補正されてしまってエンジンブレーキが強められてしまう。その結果、運転者の意図に反して制御されてしまうので、かえって運転者の負荷が増加してしまう。
このように、さまざまな外部環境に起因して、運転者が望んでいないにもかかわらず、運転者の意図(好み)に反してエンジンブレーキが強められてしまう場合がある。すると、本来、運転者の負担軽減を目的とする車速制御装置のためにかえって運転者の疲労を増大してしまう可能性があったのである。
本発明は、このような従来の問題点に着目してなされたものであり、運転者の意図しない制御を排し、運転者の負荷を軽減可能な車速制御装置を提供することを目的としている。
本発明は以下のような解決手段によって前記課題を解決する。なお、理解を容易にするために本発明の実施形態に対応する符号を付するが、これに限定されるものではない。
本発明は、車両の操作状態を検出する操作状態検出手段(2,5)と、前記操作状態に基づいて、車両の目標減速度を設定する目標減速度設定手段(31)と、車両が走行している路面の勾配を検出する路面勾配検出手段(4)と、車両の走行状態を検出する車両走行状態検出手段(3,4)と、前記路面勾配が降坂路であって、前記車両操作状態が制動操作頻度の高い状態のときには前記目標減速度が大きくなるように補正するが、前記車両走行状態検出手段で検出した車両の走行状態によっては目標減速度の補正を中止する目標減速度補正手段(32,33)と、前記目標減速度に基づいて車速を制御する車速制御手段(40〜60)と、を有することを特徴とする。
本発明によれば、路面勾配が降坂路であって車両の制動操作頻度の高い状態のときには、目標減速度が大きくなるように補正するが、車両の走行状態によっては目標減速度の補正を中止するようにした。路面勾配が降坂路であって車両の制動操作頻度の高い状態のときは、エンジンブレーキが不足している状態であると考えられるので、そのようなときには、目標減速度が大きくなるように補正してエンジンブレーキをより強く効かせることができる。しかし、一定の走行状態のときも、そのような制御を行っては運転者の意図に反した制御となることがある。そこで、そのようなときは目標減速度を大きくする補正を中止したのである。このようにすることで、運転者の意図に反した制御を防止することができ、運転者が真にエンジンブレーキによる減速を望むと考えられるときにのみ、エンジンブレーキを効かせることができるのである。このようにすることで運転性の向上を図ることができたのである。
以下では図面等を参照して本発明の実施の形態についてさらに詳しく説明する。
(第1実施形態)
図1は本発明による車速制御装置の第1実施形態を示すシステム構成を示す図である。
(第1実施形態)
図1は本発明による車速制御装置の第1実施形態を示すシステム構成を示す図である。
制御開始スイッチ1は、車速制御を実行するか否かを検出する。スイッチオン状態の場合は、車速制御実行と判断する。スイッチオフの場合は、車速制御を停止する。
ブレーキスイッチ2は、ドライバーがブレーキを踏んでいるか否かを検出する。ブレーキを踏んでいる場合はオン状態となる。ブレーキを離している場合はオフ状態となる。
車間距離センサ3は、レーザや電波を利用したもので、反射波より先行車との車間距離La、相対速度検出値Vt、先行車認識フラグfLOCKを検出する。
ナビゲーションシステム4は、取込んでいる地図情報の内、道路情報(勾配情報、カーブ情報、信号機設置位置情報、車線情報など)を車速制御ECU10へ出力する。
アクセル開度センサ5は、ドライバーのアクセル踏込み量APOを検出する。
車速センサ6は、タイヤの回転速度から車両の実車速aVSPを検出する。
エンジン回転速度センサ7は、エンジンの点火信号からエンジン回転速度aNEを検出する。
車速制御ECU10は、マイクロコンピューターとその周辺部品により構成され、制御周期(例えば10ms)毎に制御開始スイッチ1、ブレーキスイッチ2、車間距離センサ3、ナビゲーションシステム4、アクセル開度センサ5、車速センサ6、エンジン回転速度センサ7からの信号を取込んで、エンジンECU8、トランスミッションECU9に指令値を出力する。車速制御ECU10は、図1に示すように、マイクロコンピューターのソフトウェア形態により構成される制御開始判定部20、目標車速算出部30、車速制御部40、実変速比算出部50、駆動力分配部60を備えている。
車速制御ECU10は、スロットルとトランスミッションを用いることによって、車速を制御する。
エンジンECU8は、車速制御ECU10から出力されたエンジントルク指令値cTEをもとにスロットル開度を算出し、スロットルアクチュエータ81にスロットル開度信号を出力する。スロットルアクチュエータ81は、スロットル開度信号に従ってエンジンのスロットルバルブを調整する。
トランスミッションECU9は、車速制御ECU10から出力された変速比指令値cRATIOをもとに変速機の変速比を調整する。
続いて車速制御ECU10の各構成部について詳述する。
≪制御開始判定部20≫
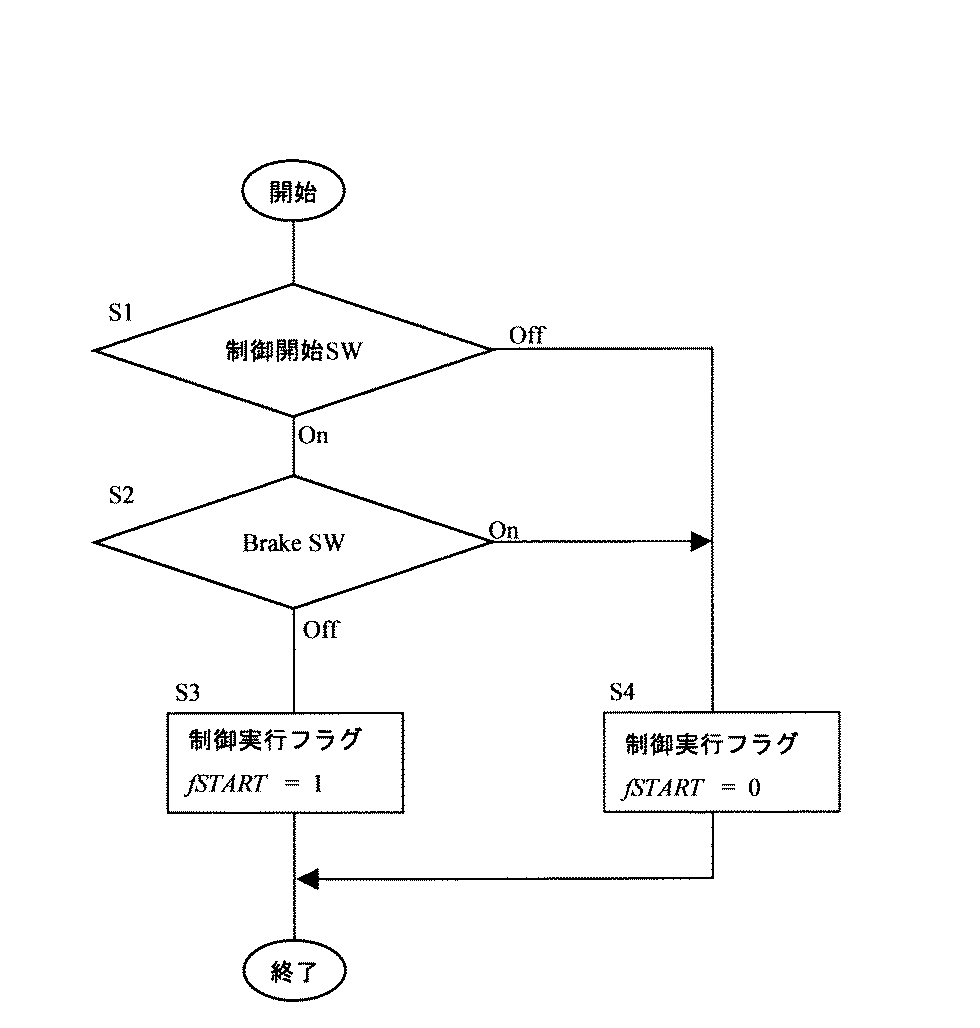
制御開始判定部20の動作を図2に示したフローチャートに基づいて説明する。
制御開始判定部20の動作を図2に示したフローチャートに基づいて説明する。
ステップ1(図では「S1」と略記する。以下同様)では、制御開始スイッチ1からの信号を取込んでスイッチがオン状態であるか、オフ状態であるかを判定する。オン状態である場合はステップ2へ進み、オフ状態である場合はステップ4へ進む。
ステップ2では、ブレーキスイッチ2からの信号を取込んでスイッチがオン状態であるか、オフ状態であるかを判定する。オン状態である場合はステップ4へ進み、オフ状態である場合はステップ3へ進む。
ステップ3では制御実行フラグfSTARTを1とし、以下のように車速制御を実行する。
ステップ4では制御実行フラグfSTARTを0とし、車速制御の停止処理を行う。例えば、ドライバーがブレーキを踏んでいる場合は、スロットル開度と変速比では目標車速tVSPに実車両の速度aVSPを追従させることができないのでフラグfSTARTを0として車速制御の停止処理を行う。
再び図1に戻る。制御開始判定部20から出力された制御実行フラグfSTARTは、エンジンECU8、トランスミッションECU9に入力される。
エンジンECU8は、制御実行フラグfSTARTが1の場合には車速制御実行状態と判定し、車速制御ECU10から出力されたエンジントルク指令値cTEに基づいたエンジントルクを出力するようにスロットルアクチュエータ81を制御する。一方、制御実行フラグfSTARTが0の場合には車速制御停止状態と判定し、アクセル踏込み量APOに応じたエンジントルクを出力するようにスロットルアクチュエータ81を制御する。
同様にトランスミッションECU9は、制御実行フラグfSTARTが1の場合には車速制御実行状態と判定し、車速制御ECU10から出力された変速比指令値cRATIOに変速比を設定する。一方、制御実行フラグfSTARTが0の場合には、車速制御停止状態と判定し、アクセル踏込み量APOと実車速aVSPに応じた変速比を設定する。
≪目標車速算出部30≫
目標車速算出部30は、図3に示すように目標加速度決定部31、目標加速度補正ゲイン算出部32、目標加速度補正処理部33、積分処理部34より構成され、制御実行フラグfSTART、実車速aVSP、アクセル踏込み量APO、ブレーキスイッチ信号、先行車認識フラグfLOCK、車間距離検出値La、相対速度検出値Vt、道路情報を取込み、目標車速tVSPを算出する。
目標車速算出部30は、図3に示すように目標加速度決定部31、目標加速度補正ゲイン算出部32、目標加速度補正処理部33、積分処理部34より構成され、制御実行フラグfSTART、実車速aVSP、アクセル踏込み量APO、ブレーキスイッチ信号、先行車認識フラグfLOCK、車間距離検出値La、相対速度検出値Vt、道路情報を取込み、目標車速tVSPを算出する。
目標加速度決定部31は、アクセル踏込み量APOと積分処理部34で算出された目標車速tVSPから図4に示すマップをもとに目標加速度tACCを決定する。図4に示されるように目標加速度tACCは、アクセル踏込み量が大きいほど大きくなる。また車速が高くなるほど走行抵抗は大きくなり、実現可能な加速度は小さくなることに対応するため、図4では同じアクセル踏込み量であれば、車速が高いほど、目標加速度は小さくなるように設定されている。
目標加速度補正ゲイン算出部32では、アクセル踏込み量APO、ブレーキSW信号、先行車認識フラグfLOCK、車間距離検出値La、相対速度検出値Vt、道路情報を入力として、目標加速度補正ゲイン最終値Gain_hosei1を算出する。動作の詳細は後に説明する。
目標加速度補正処理部33では、目標加速度補正ゲイン最終値Gain_hosei1をもとに目標加速度tACCを補正し、目標加速度補正値tACC_hoseiを算出する。動作の詳細は後に説明する。
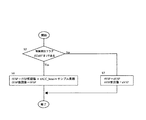
積分処理部34は、制御実行フラグfSTART、実車速aVSP、目標加速度補正値tACC_hoseiをもとに目標車速tVSPを算出する。ここで図5を参照して積分処理部34の処理内容について説明する。制御実行フラグfSTARTが0の場合、つまり制御開始スイッチ1がオフ状態、またはブレーキを踏んでいる場合は、目標車速tVSPとtVSP前回値を実車速aVSPで初期化する(ステップ7)。制御実行フラグfSTARTが1の場合、つまり制御開始スイッチ1オン状態かつブレーキを踏んでいない場合は、tVSP前回値に目標加速度補正値tACC_hoseiを加算して目標車速tVSPとする。目標車速tVSP算出後、tVSP前回値を目標車速tVSPで更新する(ステップ6)。目標車速tVSPは車速制御部40に出力される。
≪目標加速度補正ゲイン算出部32≫
目標加速度補正ゲイン算出部32は、アクセル踏込み量APO、ブレーキSW信号、先行車認識フラグfLOCK、車間距離検出値La、相対速度検出値Vt、道路情報(勾配情報、カーブ情報、信号機設置位置情報、車線情報)を入力として、目標加速度補正ゲイン最終値Gain_hosei1を算出する。目標加速度補正ゲイン算出部32の処理の流れを図6に示したフローチャートに基づいて説明する。
目標加速度補正ゲイン算出部32は、アクセル踏込み量APO、ブレーキSW信号、先行車認識フラグfLOCK、車間距離検出値La、相対速度検出値Vt、道路情報(勾配情報、カーブ情報、信号機設置位置情報、車線情報)を入力として、目標加速度補正ゲイン最終値Gain_hosei1を算出する。目標加速度補正ゲイン算出部32の処理の流れを図6に示したフローチャートに基づいて説明する。
ステップ11では、降坂路走行時間測定用タイマTIMERが、タイマしきい値TIMER_TH以下であるか否かを判定する。降坂路走行時間が所定時間以内と判定された場合は、ステップ12へ進む。このタイマしきい値TIMER_THは、実験によって予め決めておくが、例えば30〜60秒程度の一定値をあらかじめ実験によって決めておくとよい。また下り勾配がきついほど車速が上昇しやすいので、下り勾配がきついほどタイマしきい値TIMER_THを小さくするようにしてもよい。所定時間TIMER_THを越えたと判定された場合は、ステップ22へ進む。
ステップ12では、ナビゲーションシステム4からの道路情報をもとに現在降坂路を走行中か否かを判定する。現在降坂路を走行中と判定された場合は、ステップ13へ進む。登坂路または平坦路を走行中と判定された場合は、ステップ28へ進む。
ステップ13では、降坂路走行時間測定用タイマTIMERのカウントアップ(前回値に1を加算)を行い、ステップ14へ進む。
ステップ14では、アクセル踏込み量APOがアクセル踏込み量しきい値APO_TH以上であるか否かを判定する。所定のアクセル踏込み量以上であると判定された場合は、ステップ15へ進む。アクセル踏込み量が所定値未満であると判定された場合は、ステップ16へ進む。
ステップ15では、アクセル踏込み時間測定用カウンタAPO_CNTのカウントアップ(前回値に1を加算)を行い、ステップ16へ進む。
ステップ16では、先行車認識フラグfLOCKをもとに先行車の有無を判定する。先行車が存在しないと判定された場合は、ステップ18へ進む。先行車が存在すると判定された場合は、ステップ17へ進む。
ステップ17では、車間距離検出値Laが車間距離しきい値La_th以上であるか相対速度検出値Vtが0以上であるかを判定する。車間距離が所定値以上であるか先行車が離れて行っている(相対速度Vtが正)場合は、ステップ18へ進む。車間距離が所定値未満でかつ先行車に接近中(相対速度Vtが負)である場合は、ステップ28へ進む。
ステップ18では、ナビゲーションシステム4からの道路情報をもとに次のカーブまでの距離が所定値以上であるか否かを判定する。次のカーブまでの距離が所定値以上である判定された場合は、ステップ19へ進む。所定値未満であると判定された場合は、ステップ28へ進む。
ステップ19では、ナビゲーションシステム4からの道路情報をもとに次の信号機または車線変更・合流地点までの距離が所定値以上であるか否かを判定する。所定値以上であると判定された場合は、ステップ20へ進む。所定値未満であると判定された場合は、ステップ28へ進む。
ステップ20では、ブレーキSW信号をもとに運転者がブレーキ操作中であるか否かを判定する。ブレーキ操作中であると判定された場合は、ステップ21へ進む。ブレーキ操作中でないと判断された場合は、ステップ28へ進む。
ステップ21では、ブレーキ操作時間測定用カウンタBRK_CNTのカウントアップ(前回値に1を加算)を行い、ステップ28へ進む。
ステップ22では、降坂路測定時間が所定値を越えたとして降坂路走行時間測定用タイマTIMERを0で初期化し、ステップ23へ進む。
ステップ23では、ブレーキ操作時間測定用カウンタBRK_CNTがしきい値CNT_THより大であるか否かを判定する。ここで、CNT_THはタイマしきい値TIMER_THの1/2の値を設定する。ブレーキ操作時間が降坂路走行時間の50%より大であると判定された場合は、ステップ24へ進む。50%未満であると判定された場合は、ステップ25へ進む。
ステップ24では、目標加速度補正ゲインGain_hoseiの更新処理を行う。目標加速度補正ゲインGain_hosei前回値に0.1加算した値を目標加速度補正ゲインGain_hoseiの更新値とする。更新後、ステップ27へ進む。
ステップ25では、アクセル踏込み時間測定用カウンタAPO_CNTがしきい値CNT_THより大であるか否かを判定する。アクセル踏込み時間が降坂路走行時間の50%より大であると判定された場合は、ステップ26へ進む。50%未満であると判定された場合は、ステップ27へ進む。
ステップ26では、目標加速度補正ゲインGain_hoseiの更新処理を行う。目標加速度補正ゲインGain_hosei前回値から0.1を引いた値を目標加速度補正ゲインGain_hoseiの更新値とする。更新後、ステップ27へ進む。
ステップ27では、アクセル踏込み時間測定用カウンタAPO_CNTとブレーキ操作時間測定用カウンタBRK_CNTを0で初期化する。
ステップ28では、目標加速度補正ゲイン最終値Gain_hosei1を算出する。目標加速度補正ゲインGain_hoseiと勾配補正値Slope_hoseiを掛け合わせた値に1を加算した値を目標加速度補正ゲイン最終値Gain_hosei1とする。勾配補正値Slope_hoseiは図7に示されるようにナビゲーションシステム4からの道路勾配情報をもとに決定される。下り勾配が急になるほど大きな値をとる。道路勾配情報より平坦路または登坂路と判定された場合は、0となる。よって平坦路または登坂路では目標加速度補正ゲイン最終値Gain_hosei1は1となる。
以上より降坂路のアクセルオフ時( tACC < 0 )のみ目標加速度の補正を行うこととなる。降坂路にてブレーキの操作頻度が高い場合は、目標加速度補正ゲインGain_hoseiが大きくなり、アクセルオフ時の減速度が大きくなる。逆にアクセルの操作頻度が低い場合は、目標加速度補正ゲインGain_hoseiが小さくなり、アクセルオフ時の減速度が小さくなる。
≪目標加速度補正処理部33≫
再び図3に戻る。目標加速度補正処理部33は、以下のように目標加速度tACCが負の場合のみ、つまりアクセルを離している場合のみ、補正ゲイン最終値Gain_hosei1による補正を行う。
再び図3に戻る。目標加速度補正処理部33は、以下のように目標加速度tACCが負の場合のみ、つまりアクセルを離している場合のみ、補正ゲイン最終値Gain_hosei1による補正を行う。
・ tACC < 0 の場合、 tACC_hosei = tACC × Gain_hosei1
・ tACC ≧ 0 の場合、 tACC_hosei = tACC。
・ tACC ≧ 0 の場合、 tACC_hosei = tACC。
≪車速制御部40≫
図8に車速制御部40の構成を示す。車速制御部40はフィードフォワード制御部(以下F/F制御部と略す)とフィードバック制御部(以下F/B制御部と略す)からなる2自由度制御系で構成されている。車速制御部40は、目標車速tVSPを入力とし出力を自車速aVSPとした場合の伝達特性が図8の規範モデル42の伝達特性となるようにF/F制御部とF/B制御部を用いて制御を行う。規範モデル42の伝達関数GT(s)は、次式で表される。
図8に車速制御部40の構成を示す。車速制御部40はフィードフォワード制御部(以下F/F制御部と略す)とフィードバック制御部(以下F/B制御部と略す)からなる2自由度制御系で構成されている。車速制御部40は、目標車速tVSPを入力とし出力を自車速aVSPとした場合の伝達特性が図8の規範モデル42の伝達特性となるようにF/F制御部とF/B制御部を用いて制御を行う。規範モデル42の伝達関数GT(s)は、次式で表される。
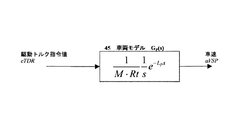
制御対象の車両モデルは、駆動トルク指令値を操作量とし、車速を制御量としてモデル化することによって、車両のパワートレインの挙動は図9に示す簡易非線形モデルで表すことができ、次式で表される。
F/F制御部は図8に示すように位相補償器41で構成され、F/F指令値は目標車速tVSPを入力とし実車速aVSPを出力とした場合の制御対象の応答特性を、予め定めた一次遅れと無駄時間要素を持つ所定の伝達特性GT(s)の特性に一致させる。制御対象の無駄時間を無視して、規範モデル42の伝達特性GT(s)を時定数τHの1次のローパスフィルタとすると、位相補償器41の伝達特性GC(s)は、次式で表される。
位相補償器(F/F制御部)41で算出されたF/F指令値にF/B補償器43で算出されたF/B指令値を加えた値に対して駆動トルク変換部44にて車両質量M、タイヤ動半径Rtを掛け合わせ、駆動トルク指令値cTDRを算出する。
≪実変速比算出部50≫
図1の実変速比算出部50は、自車速aVSPとエンジン回転速度aNEより下式に従って実変速比aRATIOを算出する。
図1の実変速比算出部50は、自車速aVSPとエンジン回転速度aNEより下式に従って実変速比aRATIOを算出する。
駆動力分配部60について図10をもとに説明する。駆動力分配部60では、車速aVSP、駆動トルク指令値cTDR、実変速比aRATIOを入力として変速比指令値cRATIOとエンジントルク指令値cTEを算出する。
変速比指令値cRATIOについては、変速比指令値設定部61にて算出される。変速比指令値設定部61では、図11に示されるマップを用いて駆動トルク指令値cTDRと自車速aVSPから変速比指令値cRATIOを決定する。尚、図11は無段変速機を用いた場合のマップを示している。
エンジントルク指令値算出部62では、駆動トルク指令値cTDRと実変速比aRATIOより下式に従ってエンジントルク指令値cTEを算出する。
本発明による車速制御装置の構成は以上であり、次に特に本発明のポイントとなる目標加速度補正ゲイン算出部32の動作について、図12、図13のタイムチャートに沿って説明する。なお、図6のフローチャートとの対応を明確にするため、フローチャートの各ステップを括弧内に付した。
図12は、降坂路走行中に、先行車等がないにもかかわらずブレーキ操作を繰り返した場合の動作を説明するタイムチャートである。
降坂路走行時間測定用タイマTIMERが、タイマしきい値TIMER_TH以下であって(S11でY)、降坂路走行中のときには(S12でY)、降坂路走行時間測定用タイマTIMERのカウントアップする(S13;図12(A))。アクセル踏込み量APOがアクセル踏込み量しきい値APO_TH未満であれば(S14でN)、アクセル踏込み時間測定用カウンタAPO_CNTのカウントアップしない。
そして、先行車もなく(S16でY)、次のカーブまでの距離があり(S18でY)、次の信号機又は合流ポイントまでの距離があるにもかかわらず(S19でY)、ブレーキ操作中のときは(S20)、ブレーキ操作時間測定用カウンタBRK_CNTのカウントアップし(S21;図12(B))、目標加速度補正ゲインGain_hoseiと勾配補正値Slope_hoseiを掛け合わせた値に1を加算して目標加速度補正ゲイン最終値Gain_hosei1を算出する(S28)。ただし、目標加速度補正ゲインGain_hoseiの初期値は、図12(C)に示すように0であるので、目標加速度補正ゲイン最終値Gain_hosei1は、図12(D)に示すように1のままである。以上の処理を制御周期ごとに繰り返し実行する。
降坂路走行時間測定用タイマTIMERが、タイマしきい値TIMER_THを超えたら(S11でN)、降坂路走行時間測定用タイマTIMERを0で初期化する(S22;図12(A))。
そしてブレーキ操作時間測定用カウンタBRK_CNTがしきい値CNT_THより大であるか否かを判定する(S23;図12(B))。本例では大であるので(S23でY)、目標加速度補正ゲインGain_hosei前回値に0.1加算して、目標加速度補正ゲインGain_hoseiの更新する(S24;図12(C)において、Gain_hosei=0→0.1)。そしてアクセル踏込み時間測定用カウンタAPO_CNTとブレーキ操作時間測定用カウンタBRK_CNTを0で初期化し(S27)、目標加速度補正ゲインGain_hoseiと勾配補正値Slope_hoseiを掛け合わせた値に1を加算して目標加速度補正ゲイン最終値Gain_hosei1を算出する(S28;図12(D)において、Gain_hosei1=1.0→1.1)。ただし、降坂勾配がきつく、勾配補正値Slope_hosei=1.0とした。
以上が、降坂走行における目標加速度補正ゲイン算出部32の通常の動作であり、降坂走行時において、ブレーキの踏み込み割合が多いときには、エンジンブレーキの不足を判定して目標加速度補正ゲイン最終値Gain_hosei1を変更するのである。
続いて、図13は、降坂路走行中に、先行車に起因してブレーキ操作が繰り返された場合の動作を説明するタイムチャートである。
降坂路走行時間測定用タイマTIMERが、タイマしきい値TIMER_TH以下であって(S11でY)、降坂路走行中のときには(S12でY)、降坂路走行時間測定用タイマTIMERのカウントアップする(S13;図13(A))。アクセル踏込み量APOがアクセル踏込み量しきい値APO_TH未満であれば(S14でN)、アクセル踏込み時間測定用カウンタAPO_CNTのカウントアップしない(図13(C))。
そして、先行車があり(S16でN)、車間距離検出値Laが車間距離しきい値La_th未満であって、かつ先行車に接近中(相対速度Vtが負)である場合は(S17でN)、ブレーキ操作時間測定用カウンタBRK_CNTのカウントアップすることなく(図13(B))、目標加速度補正ゲインGain_hoseiと勾配補正値Slope_hoseiを掛け合わせた値に1を加算して目標加速度補正ゲイン最終値Gain_hosei1を算出する(S28)。ただし、目標加速度補正ゲインGain_hoseiの初期値は、図13(D)に示すように0であるので、目標加速度補正ゲイン最終値Gain_hosei1は、図13(E)に示すように1のままである。以上の処理を制御周期ごとに繰り返し実行する。途中で先行車との車間距離が離れたときにブレーキ操作があったり、アクセル操作があったときには、図13(B)(C)に示すようにブレーキ操作時間測定用カウンタBRK_CNT、アクセル踏込み時間測定用カウンタAPO_CNTのカウントアップする。
降坂路走行時間測定用タイマTIMERが、タイマしきい値TIMER_THを超えたら(S11でN)、降坂路走行時間測定用タイマTIMERを0で初期化する(S22;図13(A))。
そしてブレーキ操作時間測定用カウンタBRK_CNTがしきい値CNT_THより大であるか否か(S23)、アクセル踏込み時間測定用カウンタAPO_CNTがしきい値CNT_THより大であるか否か(S25)を判定する。本例ではいずれも小であるので(S23でN、S25でN)、目標加速度補正ゲインGain_hoseiを更新しない。したがって、目標加速度補正ゲインGain_hoseiは初期値の0ままである(図13(D))。そして、目標加速度補正ゲインGain_hoseiと勾配補正値Slope_hoseiを掛け合わせた値に1を加算して目標加速度補正ゲイン最終値Gain_hosei1を算出する(S28)。ただし、目標加速度補正ゲインGain_hoseiが0のままであるので、目標加速度補正ゲイン最終値Gain_hosei1も、1.0のままである(図13(E))。
以上が、降坂走行において先行車に起因してブレーキ操作が繰り返された場合の制御であり、このようなときには、ブレーキ操作時間測定用カウンタBRK_CNTをカウントアップしないので、目標加速度補正ゲイン最終値Gain_hosei1を変更しないのである。
以上、詳細に述べたように、本実施形態では、降坂走行時においてブレーキの踏み込み割合が多いときには、エンジンブレーキの不足を判定して目標加速度補正ゲイン最終値Gain_hosei1を変更するが、そのブレーキ操作が先行車等の外部環境に起因するときは、目標加速度補正ゲイン最終値Gain_hosei1を変更しないようにしたのである。そして、この目標加速度補正ゲイン最終値Gain_hosei1に基づいて目標加速度tACCを補正して目標加速度補正値tACC_hoseiを算出するようにしたので、運転者の意図に反した制御を防止することができ、運転者が真にエンジンブレーキによる減速を望むと考えられるときにのみ、エンジンブレーキを効かせることができるのである。このようにすることで運転性の向上を図ることができたのである。
以上説明した実施形態に限定されることなく、その技術的思想の範囲内において種々の変形や変更が可能であり、それらも本発明と均等であることは明白である。
1 制御開始スイッチ
2 ブレーキスイッチ(操作状態検出手段)
3 車間距離センサ(車両走行状態検出手段)
4 ナビゲーションシステム(車両走行状態検出手段;路面勾配検出手段)
5 アクセル開度センサ(操作状態検出手段)
6 車速センサ
7 エンジン回転速度センサ
8 エンジンECU
9 トランスミッションECU
10 車速制御ECU
20 制御開始判定部
30 目標車速算出部
31 目標加速度決定部(目標減速度設定手段)
32 目標加速度補正ゲイン算出部(目標減速度補正手段)
33 目標加速度補正処理部(目標減速度補正手段)
40 車速制御部(車速制御手段)
50 実変速比算出部(車速制御手段)
60 駆動力分配部(車速制御手段)
2 ブレーキスイッチ(操作状態検出手段)
3 車間距離センサ(車両走行状態検出手段)
4 ナビゲーションシステム(車両走行状態検出手段;路面勾配検出手段)
5 アクセル開度センサ(操作状態検出手段)
6 車速センサ
7 エンジン回転速度センサ
8 エンジンECU
9 トランスミッションECU
10 車速制御ECU
20 制御開始判定部
30 目標車速算出部
31 目標加速度決定部(目標減速度設定手段)
32 目標加速度補正ゲイン算出部(目標減速度補正手段)
33 目標加速度補正処理部(目標減速度補正手段)
40 車速制御部(車速制御手段)
50 実変速比算出部(車速制御手段)
60 駆動力分配部(車速制御手段)
Claims (7)
- 車両の操作状態を検出する操作状態検出手段と、
前記操作状態に基づいて、車両の目標減速度を設定する目標減速度設定手段と、
車両が走行している路面の勾配を検出する路面勾配検出手段と、
車両の走行状態を検出する車両走行状態検出手段と、
前記路面勾配が降坂路であって、前記車両操作状態が制動操作頻度の高い状態のときには前記目標減速度が大きくなるように補正するが、前記車両走行状態検出手段で検出した車両の走行状態によっては目標減速度の補正を中止する目標減速度補正手段と、
前記目標減速度に基づいて車速を制御する車速制御手段と、
を有する車速制御装置。 - 前記車両操作状態が制動操作頻度の高い状態とは、或る時間のうち、半分以上の時間において制動操作がなされている状態である、
ことを特徴とする請求項1に記載の車速制御装置。 - 前記目標減速度補正手段は、前記車両走行状態検出手段で検出した車両の走行状態が、前方を走行する先行車との車間距離が所定距離未満であって、その先行車に接近中の走行状態のときには、目標減速度の補正を中止する、
ことを特徴とする請求項1又は請求項2に記載の車速制御装置。 - 前記目標減速度補正手段は、前記車両走行状態検出手段で検出した車両の走行状態が、カーブ手前を走行している走行状態であって、そのカーブまでの距離が所定距離未満であるときには、目標減速度の補正を中止する、
ことを特徴とする請求項1から請求項3までのいずれか1項に記載の車速制御装置。 - 前記目標減速度補正手段は、前記車両走行状態検出手段で検出した車両の走行状態が、信号機の手前を走行している走行状態であって、その信号機までの距離が所定距離未満であるときには、目標減速度の補正を中止する、
ことを特徴とする請求項1から請求項4までのいずれか1項に記載の車速制御装置。 - 前記目標減速度補正手段は、前記車両走行状態検出手段で検出した車両の走行状態が、他の道路との合流ポイントの手前を走行している走行状態であって、その合流ポイントまでの距離が所定距離未満であるときには、目標減速度の補正を中止する、
ことを特徴とする請求項1から請求項5までのいずれか1項に記載の車速制御装置。 - 前記目標減速度補正手段は、前記路面勾配に応じて目標減速度を補正する、
ことを特徴とする請求項1から請求項6までのいずれか1項に記載の車速制御装置。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2004120301A JP2005297900A (ja) | 2004-04-15 | 2004-04-15 | 車速制御装置 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2004120301A JP2005297900A (ja) | 2004-04-15 | 2004-04-15 | 車速制御装置 |
Publications (1)
| Publication Number | Publication Date |
|---|---|
| JP2005297900A true JP2005297900A (ja) | 2005-10-27 |
Family
ID=35329954
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2004120301A Pending JP2005297900A (ja) | 2004-04-15 | 2004-04-15 | 車速制御装置 |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP2005297900A (ja) |
Cited By (8)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2007239606A (ja) * | 2006-03-08 | 2007-09-20 | Nissan Motor Co Ltd | 車両の運動制御装置 |
| JP2007247417A (ja) * | 2006-03-13 | 2007-09-27 | Nissan Motor Co Ltd | 車両の駆動力制御装置 |
| JP2010076584A (ja) * | 2008-09-25 | 2010-04-08 | Hitachi Automotive Systems Ltd | 加減速制御装置 |
| JP2011020575A (ja) * | 2009-07-16 | 2011-02-03 | Hitachi Automotive Systems Ltd | 車両制御装置 |
| JP2012206699A (ja) * | 2011-03-30 | 2012-10-25 | Fuji Heavy Ind Ltd | 車両用運転支援装置 |
| JP2015123831A (ja) * | 2013-12-26 | 2015-07-06 | 富士重工業株式会社 | 車両の制御装置及び制御方法 |
| JP2020196382A (ja) * | 2019-06-04 | 2020-12-10 | 株式会社Subaru | 車両用走行制御装置 |
| US11945705B2 (en) | 2018-09-13 | 2024-04-02 | Crown Equipment Corporation | System and method for controlling a maximum vehicle speed for an industrial vehicle based on a calculated load |
-
2004
- 2004-04-15 JP JP2004120301A patent/JP2005297900A/ja active Pending
Cited By (9)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2007239606A (ja) * | 2006-03-08 | 2007-09-20 | Nissan Motor Co Ltd | 車両の運動制御装置 |
| JP2007247417A (ja) * | 2006-03-13 | 2007-09-27 | Nissan Motor Co Ltd | 車両の駆動力制御装置 |
| JP2010076584A (ja) * | 2008-09-25 | 2010-04-08 | Hitachi Automotive Systems Ltd | 加減速制御装置 |
| JP2011020575A (ja) * | 2009-07-16 | 2011-02-03 | Hitachi Automotive Systems Ltd | 車両制御装置 |
| JP2012206699A (ja) * | 2011-03-30 | 2012-10-25 | Fuji Heavy Ind Ltd | 車両用運転支援装置 |
| JP2015123831A (ja) * | 2013-12-26 | 2015-07-06 | 富士重工業株式会社 | 車両の制御装置及び制御方法 |
| US11945705B2 (en) | 2018-09-13 | 2024-04-02 | Crown Equipment Corporation | System and method for controlling a maximum vehicle speed for an industrial vehicle based on a calculated load |
| JP2020196382A (ja) * | 2019-06-04 | 2020-12-10 | 株式会社Subaru | 車両用走行制御装置 |
| JP7227855B2 (ja) | 2019-06-04 | 2023-02-22 | 株式会社Subaru | 車両用走行制御装置 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| EP1204541B1 (en) | Vehicle speed control system | |
| US6401024B1 (en) | Vehicle follow-up control system | |
| JP4045961B2 (ja) | 制動制御装置 | |
| EP1194308B1 (en) | Gear shifting on target speed reduction in vehicle speed control system | |
| EP1155900B1 (en) | Vehicle speed control system | |
| JP2004099023A (ja) | 車両速度の制限方法および装置 | |
| JP2005297900A (ja) | 車速制御装置 | |
| JP4608266B2 (ja) | 定速走行自動車の登坂路制御方法 | |
| JP3613138B2 (ja) | 車間距離制御装置 | |
| US6746368B2 (en) | Vehicle speed control system for automotive vehicle | |
| JPH0717298A (ja) | 自動車の走行制御装置 | |
| JP3680701B2 (ja) | 車速制御装置 | |
| JP2006291863A (ja) | 車両の駆動力制御装置 | |
| JP2013032064A (ja) | 車両用制動支援装置 | |
| JP2007076469A (ja) | 車両の制御装置 | |
| JP2004276669A (ja) | 車両の駆動力制御装置 | |
| JP3794242B2 (ja) | 車速制御装置 | |
| JP2008037152A (ja) | 車両の駆動力制御装置 | |
| JP3695284B2 (ja) | 車速制御装置 | |
| JP2007118746A (ja) | 車両の駆動力制御装置 | |
| JP2004161175A (ja) | 走行速度制御装置 | |
| JP2005125894A (ja) | 車両の速度制御装置 | |
| JP2005127424A (ja) | 車両の駆動力制御装置 | |
| JPH0717297A (ja) | 自動車の走行制御装置 | |
| JP2006291870A (ja) | 車速制御装置 |