JP2012256235A - 運転支援用情報提供装置、車載運転支援装置及び運転支援システム - Google Patents
運転支援用情報提供装置、車載運転支援装置及び運転支援システム Download PDFInfo
- Publication number
- JP2012256235A JP2012256235A JP2011129378A JP2011129378A JP2012256235A JP 2012256235 A JP2012256235 A JP 2012256235A JP 2011129378 A JP2011129378 A JP 2011129378A JP 2011129378 A JP2011129378 A JP 2011129378A JP 2012256235 A JP2012256235 A JP 2012256235A
- Authority
- JP
- Japan
- Prior art keywords
- vehicle
- distance
- driving support
- symbol
- unit
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Withdrawn
Links
Images

























Abstract
【課題】簡易な構成で、先行車両の走行状態を的確に検出して効率よく運転支援することができる運転支援システム、運転支援用情報提供装置及び車載運転支援装置を提供する。
【解決手段】車載カメラ1により撮影された撮影画像から、先行車両に搭載された運転支援用情報提供装置3の液晶パネル4の画像を抽出し、抽出した液晶パネル4の画像からバーコード様のシンボルを検出し、車両の運転操作及び走行の状態に対応付けた数値データに基づいて、検出されたシンボルに対応する先行車両の運転操作及び走行の状態を検出し、検出された先行車両の運転操作及び走行の状態に基づいて、予め設定した運転支援の内容を示す情報のうちから、運転者に提供すべき情報を選別し、この情報に基づいて自車両の運転支援を行う。
【選択図】図2
【解決手段】車載カメラ1により撮影された撮影画像から、先行車両に搭載された運転支援用情報提供装置3の液晶パネル4の画像を抽出し、抽出した液晶パネル4の画像からバーコード様のシンボルを検出し、車両の運転操作及び走行の状態に対応付けた数値データに基づいて、検出されたシンボルに対応する先行車両の運転操作及び走行の状態を検出し、検出された先行車両の運転操作及び走行の状態に基づいて、予め設定した運転支援の内容を示す情報のうちから、運転者に提供すべき情報を選別し、この情報に基づいて自車両の運転支援を行う。
【選択図】図2
Description
この発明は、自車両に関する情報を運転支援用情報として後続車両へ提供する運転支援用情報提供装置、車両前方の撮影画像から検出した運転支援用情報に基づき自車両の運転支援を行う車載運転支援装置及びこれらの装置を用いた運転支援システムに関する。
従来から、道路交通の安全性や快適性を高めるため、様々な車載の運転支援装置が実現されている。例えば、追突事故では、被追突側の車両に過失がない場合が多く、前方車両と後方車両との車間距離が適切に保たれていれば、事故の発生を防ぐことができる。
このような追突事故等を防止するための従来の安全運転支援システムとしては、例えばASV(Advanced Safety Vehicle;先進安全自動車)と呼ばれる車間距離制御機能付きの自動速度走行装置や、追突防止のための警報装置、衝突防止のための自動ブレーキ装置(プリクラッシュセーフティシステム)等が挙げられる。
このような追突事故等を防止するための従来の安全運転支援システムとしては、例えばASV(Advanced Safety Vehicle;先進安全自動車)と呼ばれる車間距離制御機能付きの自動速度走行装置や、追突防止のための警報装置、衝突防止のための自動ブレーキ装置(プリクラッシュセーフティシステム)等が挙げられる。
上述した安全運転支援システムに用いられる装置は、自身を搭載した車両の前方を走行する先行車両(直近の前方を走行する車両あるいは同じ車線上の先行車両)を検知して、それら先行車両と自車両との車間距離を所望の時間内で検知する必要がある。
この手段として、例えば、特許文献1には、赤外光レーダや電波レーダ等のレーダ装置を利用する技術が開示されている。また、特許文献2,3では、車両前方を撮影する車載カメラ及びこのカメラで撮影された画像を画像処理する画像処理装置を用いて、車両前方の撮影画像の画像処理により先行車両と自車両との車間距離を求めている。
例えば、特許文献3に記載の装置では、撮影画像から先行車両のテールランプ及びナンバープレートを検出し、検出したテールランプ及びナンバープレートの中の所定部位間の距離や面積等のスケールとその変化率を、実寸比情報と比較して車間距離及び相対速度を算出している。
この手段として、例えば、特許文献1には、赤外光レーダや電波レーダ等のレーダ装置を利用する技術が開示されている。また、特許文献2,3では、車両前方を撮影する車載カメラ及びこのカメラで撮影された画像を画像処理する画像処理装置を用いて、車両前方の撮影画像の画像処理により先行車両と自車両との車間距離を求めている。
例えば、特許文献3に記載の装置では、撮影画像から先行車両のテールランプ及びナンバープレートを検出し、検出したテールランプ及びナンバープレートの中の所定部位間の距離や面積等のスケールとその変化率を、実寸比情報と比較して車間距離及び相対速度を算出している。
車間距離制御機能付きの自動速度走行装置で短い車間距離の走行をしなければならない場合や、自車両に対して先行車両が遠い距離から近い距離までの車間距離を衝突防止装置で検出する場合は、車間距離の検出精度が不十分であると、先行車両の急ブレーキなどで追突する可能性がある。このため、従来では、先行車両のブレーキランプ(停止ランプ)の点灯を、車載カメラで撮影された前方の撮影画像の画像処理により検出して、車間距離の検出結果を補間している(例えば、特許文献4参照)。
また、特許文献5は、前方の視界の映像をカメラで撮影し、後続車両の運転者に対して自己車両の後部に搭載した大型の表示器で上記カメラで撮影された映像を表示し、さらに自己車両の走行に関する車両情報を2次元バーコードで表示する後続車両用情報伝達装置と、後続車両に設けられ、前方車両の表示器に表示された2次元バーコードから車両情報を読み取るコード読み取りカメラとを備えたシステムを開示する。
さらに、特許文献6には、車間距離以外に自車両の走行状態や前方の道路画像を後方の車両に伝達するために、テールランプが発する光に変調(時間的な光の変動)を加えて送信する光送信装置と、その変調された光信号を受信して復調する光受信装置とを備えた車車間通信システムが開示されている。これにより、速度制御や警報を的確に行うことが可能である。
さらに、車間距離が短い場合における自動車間距離の制御に加えて、操舵の自動制御も行うシステムが、特許文献7,8で提案されている。これら文献に記載のシステムでは、先行車両の後部に複数のマーカを設けておき、後続車両に搭載した運転支援装置が、車載カメラで撮影した画像情報からマーカを検出する。運転支援装置は、検出されたマーカを基準として先行車両との相対的な位置情報(車間距離や進行方向のズレ等)を求め、自動的に先行車両に対する追従走行を行う。これにより、複数の大型車による隊列走行を実現している。
特許文献9には、運転者が適当な先頭車両(あるいは先行車両)を見つけてこれに追従することを指示したときに、車間距離制御を自動的に行う運転支援システムが開示されている。このシステムでは、自車両が自動走行車あるいは手動走行であるか、急減速状態であるか否か、先頭車両又は追従車両であるか等に応じて、予め定められた2次元LEDアレイの点灯パターンを持つ“インジケータ”を車両後部に設けておく。そして、このインジケータが搭載された車両の直近の後続車両に設けた車載カメラで、インジケータの画像をパターン認識して先行車両の走行状態を検出し、隊列走行に利用する。
特許文献1に代表される従来のシステムでは、レーダ装置で車間距離を検知する際に、車両だけでなく、標識や街灯、電柱、信号機、トンネル、高架道路、橋桁等といった道路上あるいは路側の構造物についても検知結果として出力される。従って、道路内の車両であることを限定するために、車載カメラ及びその撮影画像を画像処理する画像処理装置を用いて路面の白線や構造物を認識する機能を追加する必要があった。
また、レーダ装置自体は、光又は電波の送信装置と受信装置が必要であり、さらに測定する車間距離の範囲を実用的なものにするためには、光又は電波の送出方向を可変にする仕組みも導入しなければならない。
また、レーダ装置自体は、光又は電波の送信装置と受信装置が必要であり、さらに測定する車間距離の範囲を実用的なものにするためには、光又は電波の送出方向を可変にする仕組みも導入しなければならない。
また、特許文献2に代表される従来の技術は、光軸調整された2つの車載カメラが必要であり、加えて三角測量が可能な場所に車載カメラを搭載し、調整済の2つの車載カメラの光軸がずれないようにしなければならず、構造設計が制約されるという課題があった。
特許文献3に代表される従来の技術では、ナンバープレート及び昼間は点灯していないテールランプ等を画像から抽出するために高度な画像処理技術を使用するので、高速動作が可能な画像処理装置が必要となり、回路規模も大きくなるという課題があった。
特許文献3に代表される従来の技術では、ナンバープレート及び昼間は点灯していないテールランプ等を画像から抽出するために高度な画像処理技術を使用するので、高速動作が可能な画像処理装置が必要となり、回路規模も大きくなるという課題があった。
特許文献4に代表される従来の技術では、ブレーキランプ等の点灯動作を画像処理装置で検出した結果を利用することで、特許文献1に記載の車間距離検出装置の欠点(応答性と検出の信頼性)を解消できる。しかしながら、特許文献4の発明を適用するためには、車載カメラに加え、自車両前方の撮像画像に、道路及び先行車両の3次元情報による位置情報から設定した先行車両の検出枠に基づいて、先行車両のテールランプ検出領域を設定し、このテールランプ検出領域の輝度変化または面積変化により先行車両のブレーキランプ点灯を検出する画像処理装置を新たに追加する必要があるという課題があった。このような道路及び先行車両の3次元情報による位置情報から設定した先行車両の検出枠等の画像処理を行うには、高性能の画像処理装置が必要である。
特許文献5に記載の従来の技術は、運転支援システムとして最も重要な情報である前方車両との車間距離の測定に前方測距センサを別途設置しなければならず、コストアップとなる。また、2次元バーコードの表示器は、車載の外部表示器としてはかなり大型のものとなり、その搭載が大型トラック等に限定されてしまい、一般車両に搭載しても実用性がほとんどないという欠点がある。さらに、通常の2次元バーコードの読み取り距離は遠くても1m程度であり、それ以上の車間距離で走行する車両に搭載された表示器の2次元バーコードを読み取るには、特殊でかつ高価な読み取り機を用意する必要がある。
また、特許文献6に代表される従来の技術は、光変調信号を用いた車車間通信そのものでは車間距離を検出できないので、車間距離を検出する装置を別個に設ける必要がある。
さらに、光通信システムの構成として、テールランプが発する光を変調した光信号を送信する光変調送信装置及びこの送信信号を受信して復調する受信装置を備える必要がある。加えて、受信側がいずれの車両に搭載した装置と通信しているのかを同定する機能も必要となる。このため、今までにない高速動作が可能な専用のイメージセンサが必要であり、実用化までにはかなりの障壁があるという課題があった。
車間距離の検知結果の信頼性を向上させるためには、複雑な画像処理アルゴリムを構築して、膨大な画像データの演算処理を実行する技術が提案されている。
しかしながら、車載用として実用化する上で必須となる小型であって、搭載性がよく、消費電力が少ないものであり、かつ応答速度(処理速度)を向上させるためには、新たに構築したアルゴリズムを、ソフトウェアからハードウェア処理に替えて、専用デバイスを構成する必要があった。
さらに、光通信システムの構成として、テールランプが発する光を変調した光信号を送信する光変調送信装置及びこの送信信号を受信して復調する受信装置を備える必要がある。加えて、受信側がいずれの車両に搭載した装置と通信しているのかを同定する機能も必要となる。このため、今までにない高速動作が可能な専用のイメージセンサが必要であり、実用化までにはかなりの障壁があるという課題があった。
車間距離の検知結果の信頼性を向上させるためには、複雑な画像処理アルゴリムを構築して、膨大な画像データの演算処理を実行する技術が提案されている。
しかしながら、車載用として実用化する上で必須となる小型であって、搭載性がよく、消費電力が少ないものであり、かつ応答速度(処理速度)を向上させるためには、新たに構築したアルゴリズムを、ソフトウェアからハードウェア処理に替えて、専用デバイスを構成する必要があった。
特許文献7,8に記載される従来のシステムでは、複数のマーカを設けるための大きな平面部を後部に有する大型車両でなければ適用することができず、一般の自動車への適用が非常に困難であるという課題があった。
また、特許文献9は、自車両が自動走行車両あるいは手動走行であるか、急減速状態であるか否か、先頭車両又は追従車両であるかなどに応じて、予め設定された2次元LEDアレイの点灯パターンを持つ“インジケータ”を車両の後部に設けておき、インジケータが搭載された車両の直近後方を走行する車両に設けた車載カメラでインジケータ画像をパターン認識して前方車両の走行状態を検出して隊列走行に利用する。しかしながら、高速道路や自動車専用道路だけでなく、一般道での運転支援システムとして適用や、車載装置として実用化するには、下記のような課題がある。
また、特許文献9は、自車両が自動走行車両あるいは手動走行であるか、急減速状態であるか否か、先頭車両又は追従車両であるかなどに応じて、予め設定された2次元LEDアレイの点灯パターンを持つ“インジケータ”を車両の後部に設けておき、インジケータが搭載された車両の直近後方を走行する車両に設けた車載カメラでインジケータ画像をパターン認識して前方車両の走行状態を検出して隊列走行に利用する。しかしながら、高速道路や自動車専用道路だけでなく、一般道での運転支援システムとして適用や、車載装置として実用化するには、下記のような課題がある。
先ず、特許文献9においても、レーダ装置で車間距離を検知するので、自車両が一般道を走行する際、標識や街灯、電柱、信号機、トンネル、高架道路、橋桁等といった道路上あるいは路側の構造物についても検知結果として出力される。従って、道路内の車両であることを限定するための画像処理が必要となる。
また、インジケータ画像をパターン認識(テンプレートマッチング)して、前方車両の走行状態を検出するため、高度な画像処理技術を使用する必要があり、高速動作が可能な画像処理装置を用いた回路規模の大きい装置となって、車載装置としての実用性に欠けるという課題があった。
例えば、後続車両への情報提供をパターンで行う場合、提供できる情報の種類に応じてその数と同じ数の異なるパターンを、送る側及び受ける側で全ての種類のパターンを画像として保持する必要がある。さらに、受ける側では、提供されてきたパターンがどの情報に対応するかわからないため、自身が有する全てのパターンについて、1個ずつパターン認識を繰り返す処理を行わなければならない。このため、非常に効率が悪くリアルタイム性が確保できない。
また、インジケータ画像をパターン認識(テンプレートマッチング)して、前方車両の走行状態を検出するため、高度な画像処理技術を使用する必要があり、高速動作が可能な画像処理装置を用いた回路規模の大きい装置となって、車載装置としての実用性に欠けるという課題があった。
例えば、後続車両への情報提供をパターンで行う場合、提供できる情報の種類に応じてその数と同じ数の異なるパターンを、送る側及び受ける側で全ての種類のパターンを画像として保持する必要がある。さらに、受ける側では、提供されてきたパターンがどの情報に対応するかわからないため、自身が有する全てのパターンについて、1個ずつパターン認識を繰り返す処理を行わなければならない。このため、非常に効率が悪くリアルタイム性が確保できない。
この発明は、上記のような課題を解決するためになされたもので、簡易な構成で、先行車両の走行状態を的確に検出して効率よく運転支援することができる運転支援システム、運転支援用情報提供装置及び車載運転支援装置を得ることを目的とする。
この発明に係る運転支援システムは、バーコード様のシンボルを標示する標示部と、自車両の運転操作及び走行の状態を検出する運転操作・走行状態検出部と、運転操作・走行状態検出部により検出された自車両の運転操作及び走行の状態に対応するシンボルのデータ列を所定時間ごとに順次標示するように、標示部を制御する制御部とを備えた運転支援用情報提供装置と、自車両の前方を撮影する車載カメラと、車載カメラにより撮影された撮影画像から、先行車両に搭載された上記運転支援用情報提供装置の標示部の画像を抽出する抽出部と、抽出部により抽出された標示部の画像から、当該標示部に標示されたバーコード様のシンボルを検出するシンボル情報検出処理部と、シンボル情報検出処理部により検出されたシンボルに対応する先行車両の運転操作及び走行の状態を検出する状態検出部と、状態検出部により検出された先行車両の運転操作及び走行の状態に基づいて、予め設定した運転支援の内容を示す情報のうちから、運転者に提供すべき情報を選別し、当該選別した情報に基づいて自車両の運転支援を行う運転支援判断処理部とを備えた車載運転支援装置とを備える。
この発明によれば、簡易な構成で、先行車両の走行状態を的確に検出して効率よく運転支援することができるという効果がある。
実施の形態1.
図1は、この発明に係る運転支援システムの概要を示す図である。この発明に係る運転支援システムは、先行車両で標示されている情報に基づいて後続車両の運転支援(衝突防止など)を実施するシステムであり、車載運転支援装置及び運転支援用情報提供装置を備える。図1において、この発明に係る車載運転支援装置は、車載カメラ1(フロントカメラ)を備えた車両Aに搭載され、この発明に係る運転支援用情報提供装置は、バーコード様のシンボルデータを標示するハイマウントランプ2を備えた車両Bに搭載される。
図1は、この発明に係る運転支援システムの概要を示す図である。この発明に係る運転支援システムは、先行車両で標示されている情報に基づいて後続車両の運転支援(衝突防止など)を実施するシステムであり、車載運転支援装置及び運転支援用情報提供装置を備える。図1において、この発明に係る車載運転支援装置は、車載カメラ1(フロントカメラ)を備えた車両Aに搭載され、この発明に係る運転支援用情報提供装置は、バーコード様のシンボルデータを標示するハイマウントランプ2を備えた車両Bに搭載される。
また、この発明に係る運転支援用情報提供装置は、車両Bの後部に配置されたハイマウントランプ2の液晶表示を制御してバーコード様のシンボルのデータ列を所定時間ごとに順次標示することにより、そのシンボルデータから後方を走行する車両Aの運転者へ注意を喚起する情報を伝達する。一方、この発明に係る車載運転支援装置は、車載カメラ1に撮影された車両Bの画像からハイマウントランプ2が標示するバーコード様のシンボルを検出し、このシンボルに対応する情報に基づいて自車両の運転支援を行う。
例えば、渋滞車列の最後尾にある車両Bは、後方から接近する車両Aに追突される可能性がある。そこで、車両Bの後部に設けたハイマウントランプ2において、車両Bの走行状態及び車両Bの運転操作状態に対応した情報を、バーコード様のシンボルデータとして標示する。そして、車両Aに搭載された車載運転支援装置は、車載カメラ1の撮影画像からバーコード様のシンボルデータを検出し、シンボルデータから車両Bに関する情報を特定する。この情報に基づいて、渋滞で車両Bの減速していることや車両Bが停車したこと等を車両A側で把握することができる。
(1)運転支援用情報提供装置について
先ず、この発明に係る運転支援用情報提供装置の構成及びその動作について説明する。
図2は、実施の形態1に係る運転支援用情報提供装置の構成を示すブロック図である。図2において、実施の形態1に係る運転支援用情報提供装置3は、ハイマウントランプ2の液晶パネルを利用して自車両に関する情報を後続車両へ伝達する装置であり、ハイマウントランプ2、運転操作・走行状態検出部6及びハイマウントランプ制御部7を備える。また、ハイマウントランプ2は、液晶パネル4及び液晶駆動回路5を備える。
先ず、この発明に係る運転支援用情報提供装置の構成及びその動作について説明する。
図2は、実施の形態1に係る運転支援用情報提供装置の構成を示すブロック図である。図2において、実施の形態1に係る運転支援用情報提供装置3は、ハイマウントランプ2の液晶パネルを利用して自車両に関する情報を後続車両へ伝達する装置であり、ハイマウントランプ2、運転操作・走行状態検出部6及びハイマウントランプ制御部7を備える。また、ハイマウントランプ2は、液晶パネル4及び液晶駆動回路5を備える。
液晶パネル4は、ハイマウントランプ2を構成する標示部であり、バーコード様データを標示する。液晶パネル4は、車両の後部に搭載可能な大きさであればよい。
液晶駆動回路5は、液晶パネル4の駆動回路であり、ハイマウントランプ制御部7からの制御信号8に従って液晶パネル4を駆動する回路である。
液晶駆動回路5は、液晶パネル4の駆動回路であり、ハイマウントランプ制御部7からの制御信号8に従って液晶パネル4を駆動する回路である。
運転操作・走行状態検出部6は、自車両の運転操作及び走行の状態を検出する構成部である。例えば、ブレーキ操作信号、アクセル操作信号、車輪速パルス、エアーバッグ動作信号(衝突信号)を入力して、運転者によるブレーキ操作(ブレーキON)、アクセル操作(アクセルON)、車両走行速度、自車両の異常状態(衝突、被衝突のどちらでも、衝突だけでもよい)が検出される。
ハイマウントランプ制御部7は、ハイマウントランプ2内の液晶駆動回路5による液晶パネル4の駆動を制御する構成部であり、運転操作・走行状態検出部6により検出された自車両の運転操作及び走行の状態に対応するシンボルデータがコード化されたバーコード様のデータを標示させる制御信号8を生成して液晶駆動回路5に出力する。
図3は、実施の形態1に係るハイマウントランプの液晶パネル部の構成を示す図である。本発明では、後続車両に搭載された車載運転支援装置において、車載カメラ1の撮影画像から、図3(a)に示すようなハイマウントランプ2の液晶パネル4に標示した縦縞のバーコードを抽出する。液晶パネル4の外枠は、例えば自車両の後部に搭載可能な大きさであるとよい。また、ハイマウントランプ2は、図3(b)に示すように、透過型の液晶パネル4とその照明器4Aで構成される。この照明器4Aからの照明光が、液晶パネル4のバックライトとなる。
図4は、運転支援用情報提供装置が提示するバーコード様データを説明するための図である。先ず、既存のバーコードは、図4(a)に示すように、ディジタル値“0”を表す幅の狭い黒色の帯とディジタル値“1”を表す幅の広い黒色の帯を、白色の下地に対して配置している。また、帯と帯との間隔には、狭い間隔と広い間隔がある。これら黒色帯とその間隔との組み合わせによって情報がシンボル化される。一般にバーコードは、符号化した複数の情報、すなわち複数のシンボルデータを並べて記載される。
本発明に係る運転支援用情報提供装置は、図4(b)に示すように、上述のバーコードのような模様を液晶パネル4に標示する。液晶パネル4において、黒色帯は、照明器4Aが発した光を液晶で遮った非発光部に相当し、帯と帯との間隔は、照明器4Aが発した光が透過される発光部に相当する。なお、図4(b)の例では、広い帯幅を狭い帯幅の2倍としている。
また、図4(a)に示した通常のバーコードが複数のシンボルデータを並べて記載されるのに対して、本発明では、図4(b)に矢印で示すように、複数のシンボルのデータ列を所定時間ごとに変化させて液晶パネル4に標示する。例えば、通常の車載カメラでは、30フレーム/秒で撮影されているので、本発明では、1フレーム分の撮影時間より若干早め、すなわち1/31秒から1/32秒で変化させる。
図5は、運転支援用情報提供装置に提示されるバーコード様データを構成するシンボルデータの名称及びその標示サイクルの一例を示す図である。また、図6は、図5の各シンボルデータの詳細を示す図である。図5に示す例では、バーコード様データを構成する各シンボルデータが所定時間ごと(T1〜T5)のサイクルで標示される。
時間T1に標示する“フラグ”は、例えば、図6(a)に示すように、数値“20”のデータである。この値は、バーコード様のシンボルのデータ列うち、シンボル“フラグ”のみに設定される。すなわち、“フラグ”は、数値“20”という特有な値を付したユニークシンボルであり、その検出によってバーコード様のシンボルデータ列の標示サイクルの先頭位置を知ることができる。
時間T1に標示する“フラグ”は、例えば、図6(a)に示すように、数値“20”のデータである。この値は、バーコード様のシンボルのデータ列うち、シンボル“フラグ”のみに設定される。すなわち、“フラグ”は、数値“20”という特有な値を付したユニークシンボルであり、その検出によってバーコード様のシンボルデータ列の標示サイクルの先頭位置を知ることができる。
“フラグ”に続いて、時間T2に“車両走行速度”、時間T3に“運転操作状態”、時間T4に“車間距離演算用のシンボル幅情報”が標示される。
シンボルデータ“車両走行速度”は、図6(b)に例示するように、所定の車両走行速度(20km/h)ごとに区分されており、自車両の車速が0〜20km/hであるとき、数値“1”のシンボルデータが標示される。また、車両走行速度が40〜60km/hであるとき、数値“2”のシンボルデータが標示される。この他、例えば自車両の異常状態を知らせる際には、数値“8”のシンボルデータが標示される。
シンボルデータ“車両走行速度”は、図6(b)に例示するように、所定の車両走行速度(20km/h)ごとに区分されており、自車両の車速が0〜20km/hであるとき、数値“1”のシンボルデータが標示される。また、車両走行速度が40〜60km/hであるとき、数値“2”のシンボルデータが標示される。この他、例えば自車両の異常状態を知らせる際には、数値“8”のシンボルデータが標示される。
また、シンボルデータ“運転操作状態”は、図6(c)に示すように例えば緩い減速、急な減速、通常の減速、加速、クルーズ状態の各段階に区分されており、自車両の運転者がブレーキペダルを踏まず、アクセルペダルを踏み込んでいないとき(クルーズ状態)として、数値“1”のシンボルデータが標示される。また、運転者が、アクセルペダルを踏み込んだとき(加速操作)、数値“2”のシンボルデータが標示される。
さらに、シンボルデータ“車間距離演算用のシンボル幅情報”は、液晶パネル4の画面幅の実距離、すなわちその時点で標示されているシンボル幅を示しており、図6(d)に示すように、例えば実距離が20cmであると、数値“1”のシンボルデータが標示される。また、車間距離演算用のシンボル幅の実距離が30cmの場合は、数値“2”のシンボルデータが標示される。
“車間距離演算用のシンボル幅情報”に続いて、時間T5に“CRC”が標示される。CRC(Cyclic Redundancy Check、巡回冗長検査)は、時間T1〜T4までのデータにおける誤りの有無を検査するためのデータである。図5に示すように、CRCの後はフラグに戻り、以降繰り返し標示される。
また、車種ごとに対応付けた数値データに基づいて、自車両の“車種”に対応する数値を示すシンボルデータを生成し、液晶パネル4に標示するようにしてもよい。“車種”としては、一般車、大型車、バイクなどが挙げられる。これにより、後続車両において、先行車両の車種に応じた運転支援を行うことができる。
次に、運転支援用情報提供装置の動作について説明する。
運転操作・走行状態検出部6には、運転者の運転操作によって生じたブレーキ操作信号及びアクセル操作信号が入力される。ブレーキ操作信号及びアクセル操作信号としては、例えば、それぞれのペダルの動き(踏み込み動作)に応じてオン又はオフするスイッチの電気信号が挙げられる。また、運転操作・走行状態検出部6には、車輪速パルスが入力され、衝突等の異常が生じた場合にはエアーバッグ動作信号が入力される。ここで、車輪速パルスとは、駆動車輪のドライブシャフトの回転と同期して回転する磁石発電機などから取り出せる交流の電気信号を波形整形したものである。また、エアーバッグ動作信号は、車両の衝突時に発生するエアーバッグECU(電子コントロールユニット)内の衝突信号である。
運転操作・走行状態検出部6には、運転者の運転操作によって生じたブレーキ操作信号及びアクセル操作信号が入力される。ブレーキ操作信号及びアクセル操作信号としては、例えば、それぞれのペダルの動き(踏み込み動作)に応じてオン又はオフするスイッチの電気信号が挙げられる。また、運転操作・走行状態検出部6には、車輪速パルスが入力され、衝突等の異常が生じた場合にはエアーバッグ動作信号が入力される。ここで、車輪速パルスとは、駆動車輪のドライブシャフトの回転と同期して回転する磁石発電機などから取り出せる交流の電気信号を波形整形したものである。また、エアーバッグ動作信号は、車両の衝突時に発生するエアーバッグECU(電子コントロールユニット)内の衝突信号である。
運転操作・走行状態検出部6では、ブレーキ操作信号及びアクセル操作信号を受けて、ブレーキがオンかオフか、アクセルがオンかオフか、という各1ビットのオンオフ信号をハイマウントランプ制御部7へ出力する。
また、運転操作・走行状態検出部6は、車輪速パルス数を所定周期でカウントし、車輪の外形を考慮して車両走行速度を演算する。例えば、1ビット当たり0.5km/hの8ビットのディジタル信号により、0から128km/hまでの車輪速度信号を、リアルタイムでハイマウントランプ制御部7へ出力する。ただし、128km/h以上の車両走行速度では128km/hとする。
また、運転操作・走行状態検出部6は、車輪速パルス数を所定周期でカウントし、車輪の外形を考慮して車両走行速度を演算する。例えば、1ビット当たり0.5km/hの8ビットのディジタル信号により、0から128km/hまでの車輪速度信号を、リアルタイムでハイマウントランプ制御部7へ出力する。ただし、128km/h以上の車両走行速度では128km/hとする。
さらに、運転操作・走行状態検出部6は、エアーバッグECUからの衝突信号の入力と同期して、異常状態であることを表すオンの信号を、ハイマウントランプ制御部7へ出力する。なお、衝突信号の入力信号がパルス的なものか、ステップ状のものかに拘わらず、一旦入力されると、所定時間(例えば10秒〜数十秒間)は異常状態がオンの信号を出力する。
ハイマウントランプ制御部7は、運転操作・走行状態検出部6から出力される上記4種の信号を入力すると、後続車両に提供する情報のシンボルデータを生成し、このシンボルデータを標示させる制御信号8をハイマウントランプ2の液晶駆動回路5へ出力する。
図7は、アクセル操作によるハイマウントランプ制御部への入力信号と出力信号の生成の概要を示す図である。ハイマウントランプ制御部7は、例えば、図7(a)に示すようなアクセルのオンオフ信号(アクセル操作信号)を入力すると、入力したアクセルのオンオフ信号に連動して、対応する“運転操作状態”を示すシンボルデータを標示させる制御信号8(出力信号)を生成して出力する。
図7は、アクセル操作によるハイマウントランプ制御部への入力信号と出力信号の生成の概要を示す図である。ハイマウントランプ制御部7は、例えば、図7(a)に示すようなアクセルのオンオフ信号(アクセル操作信号)を入力すると、入力したアクセルのオンオフ信号に連動して、対応する“運転操作状態”を示すシンボルデータを標示させる制御信号8(出力信号)を生成して出力する。
このとき、ハイマウントランプ制御部7は、運転操作の状態が所定時間(例えば0.1秒程度)以上継続したときのみ、その運転操作の状態に移行したものとして制御信号8を生成する。例えば、図7(a)上段のアクセルのオンオフ信号が、実際の動作として(実動的には)図7(a)下段に示す挙動を示していた場合、アクセルの実動的なオン状態に相当する閾値(ディジタルもしくはアナログ的に設定した値、アナログタイマーもしくはディジタルタイマーに対応した時間計測用の閾値でもある)(図7(a)に一点破線で示す)に達していない、もしくは当該閾値に達した時間が所定時間未満の期間については、信号がカットオフされる。そして、図7(b)に示すようにアクセルの実動的なオン状態に相当する閾値に達した時間が所定時間以上継続した期間のみアクセルがオン状態であることを示す制御信号8が生成される。なお、ブレーキ操作信号についても、図7と同様な動作波形となるが、カットオフされる時間は、アクセル操作の場合よりも短い時間とするのが望ましい。
図8は、車速に応じたハイマウントランプ制御部への入力信号と出力信号の生成の概要を示す図である。図8(a)は運転操作・走行状態検出部6からハイマウントランプ制御部7へ入力される自車両の車輪速度信号の経時変化を示しており、図8(b)は図8(a)の車輪速度信号に対応する速度範囲を示す制御信号8の概要を示している。なお、図8(a)に示す車輪速度信号は、8ビットのディジタル信号であるが、説明の簡単のためアナログ的に表記している。
ハイマウントランプ制御部7は、運転操作・走行状態検出部6から入力された自車両の車輪速度信号を速度範囲ごとに規定した閾値と比較して、この比較結果から自車両の車両走行速度を、速度範囲ごとに弁別する。図8に示す例では、0から128km/hまでの車両走行速度を20km/hごとの速度範囲に区分し、各速度範囲を規定する閾値速度と比較して車両走行速度を弁別する。このとき、ハイマウントランプ制御部7は、自車両の走行速度が現在の速度範囲の上限を規定する閾値速度以上になり、次に速い速度範囲に弁別された場合、所定の時間だけ元の速度範囲に戻らないように、当該閾値速度にヒステリシス(閾値速度を下げる)を設ける。
また、自車両の車両走行速度が、現在の速度範囲の下限を規定する閾値速度未満となり、次に遅い速度範囲に弁別された場合においても、所定の時間だけ元の速度範囲に戻らないように当該閾値速度にヒステリシスを設ける(閾値速度を上げる)。
ヒステリシスを設ける時間は、低速範囲から高速範囲へ変化する場合よりも、高速範囲から低速範囲へ変化する場合の方が長くなるように設定するのが望ましい。例えば、低速範囲から高速範囲へ変化する場合は0.2秒程度の時間を設定し、高速範囲から低速範囲へ変化する場合は、0.5秒程度の時間を設定する。
ヒステリシスを設ける時間は、低速範囲から高速範囲へ変化する場合よりも、高速範囲から低速範囲へ変化する場合の方が長くなるように設定するのが望ましい。例えば、低速範囲から高速範囲へ変化する場合は0.2秒程度の時間を設定し、高速範囲から低速範囲へ変化する場合は、0.5秒程度の時間を設定する。
ハイマウントランプ2の液晶駆動回路5は、ハイマウントランプ制御部7から制御信号8を入力すると、当該制御信号8に従って液晶パネル4へのバーコード様データの標示を実施する。ここで、自車両の車両走行速度が40〜60km/hの速度範囲であり、前方を走行する車両の運転者がブレーキペダルを踏んで減速しており、さらに車間距離演算用のシンボル幅情報が30cmである場合を例に挙げる。この場合、液晶駆動回路5には、図5及び図6に示したように、“フラグ”の数値“20”のシンボル、“車両走行速度”の数値“3”のシンボル、“運転操作状態”の数値“3”のシンボル、“車間距離演算用のシンボル幅情報”の数値“2”のシンボル、“CRC”の数値CRCのシンボルを、それぞれ標示させる制御信号8が順次入力される。液晶駆動回路5は、制御信号8に従って、液晶パネル4にバーコード様データを構成する各シンボルを順次標示させる。
(2)車載運転支援装置について
次に、この発明に係る車載運転支援装置の構成及びその動作について説明する。
図9は、実施の形態1に係る車載運転支援装置の構成を示すブロック図である。図9において、実施の形態1に係る車載運転支援装置9は、車載カメラ1、前段処理部10、運転支援判断処理部14、音声発生部15、操作力発生部16及び減速制御部17を備える。車載カメラ1は、車両前方部(例えば、フロントウィンドウの上辺部、ルームミラーの裏側など)に設置されたカメラであり、車両前方の被撮影領域の映像(先行車両を被写体に含む画像)を濃淡画像で撮影する。
次に、この発明に係る車載運転支援装置の構成及びその動作について説明する。
図9は、実施の形態1に係る車載運転支援装置の構成を示すブロック図である。図9において、実施の形態1に係る車載運転支援装置9は、車載カメラ1、前段処理部10、運転支援判断処理部14、音声発生部15、操作力発生部16及び減速制御部17を備える。車載カメラ1は、車両前方部(例えば、フロントウィンドウの上辺部、ルームミラーの裏側など)に設置されたカメラであり、車両前方の被撮影領域の映像(先行車両を被写体に含む画像)を濃淡画像で撮影する。
前段処理部10は、車載カメラ1により撮影された前方画像から、先行車両のハイマウントランプ2の画像部分を抽出してバーコード様データを検出し、バーコード様データのシンボルデータを参照して、自車両との車間距離、先行車両の運転操作及び走行の状態を検出する構成部である。その構成として、画像処理部11、距離演算部12及び走行状態検出部13を備える。画像処理部11は、車載カメラ1により撮影された前方画像から、先行車両のハイマウントランプ2の画像部分を抽出するハイマウントランプ抽出処理部11aと、ハイマウントランプ抽出処理部11aにより抽出されたハイマウントランプ2の画像部分からシンボルデータを検出するシンボル情報検出処理部11bを備える。
距離演算部12は、シンボル情報検出処理部11bによって検出されたシンボルデータから自車両と先行車両との車間距離を検出する構成部である。走行状態検出部13は、シンボル情報検出処理部11bにより検出されたランプ部4の点灯状態から、先行車両の運転操作及び走行の状態を検出する構成部である。
運転支援判断処理部14は、前段処理部10の距離演算部12及び走行状態検出部13から入力した情報に基づいて、記憶部14aに記憶されている運転支援の内容を示す情報のうちから運転者に提供すべき情報を選別し、当該情報に基づいて自車両の運転支援を行う構成部である。記憶部14aは、運転支援の内容を示す情報を、前段処理部10から入力される自車両との車間距離、先行車両の運転操作及び走行の状態に対応付けて記憶する記憶部である。
運転支援の内容を示す情報とは、自車両との車間距離を、所定の距離範囲ごとの複数の段階に区分された車間距離(適正な車間距離、適正な車間距離より短い車間距離、危険な車間距離)に分類し、その距離範囲における先行車両の運転操作及び走行の状態に応じた運転支援の内容を予め設定した情報である。例えば、自車両との車間距離が10mの距離範囲にあり、先行車両の運転操作状態が急減速、走行状態が40〜60km/hの車両走行速度である場合には、自車両が当該先行車両に追突するおそれがあるので、直ちに急減速する旨の内容が特定される。また、運転支援の内容を示す情報には、運転支援の内容を伝える音声情報や警報音が含まれる。
音声発生部15は、運転支援判断処理部14により選別された運転支援の内容を伝える音声情報や警報音を出力する構成部である。例えば、車内スピーカが利用される。操作力発生部16は、自車両のブレーキペダルの操作に応じたブレーキ力を発生して自車両の制動動作を行う構成部である。減速制御部17は、自車両の車両走行速度の減速を制御する構成部である。これらの構成部は、運転支援判断処理部14からの駆動信号を受けて制動や減速を実施する。
次に、車載運転支援装置の動作について説明する。
図10は、実施の形態1に係る車載運転支援装置による先行車両に関する情報の取得処理を示すフローチャートである。この図に沿って先行車両に関する情報の取得処理の詳細を説明する。
先ず、前段処理部10の画像処理部11におけるハイマウントランプ抽出処理部11aが、車載カメラ1により撮影された前方画像(先行車両を被写体に含む濃淡画像)を入力する(ステップST1)。車載カメラ1では、通常の車載カメラと同様に、例えば、30フレーム/秒で撮影を行い、先行車両に搭載されたハイマウントランプ2の液晶パネル4は、バーコード様データを構成する各シンボルデータを、車載カメラ1の1フレームの撮影時間よりも短い1/31秒程度の時間ごとに変化させている。
図10は、実施の形態1に係る車載運転支援装置による先行車両に関する情報の取得処理を示すフローチャートである。この図に沿って先行車両に関する情報の取得処理の詳細を説明する。
先ず、前段処理部10の画像処理部11におけるハイマウントランプ抽出処理部11aが、車載カメラ1により撮影された前方画像(先行車両を被写体に含む濃淡画像)を入力する(ステップST1)。車載カメラ1では、通常の車載カメラと同様に、例えば、30フレーム/秒で撮影を行い、先行車両に搭載されたハイマウントランプ2の液晶パネル4は、バーコード様データを構成する各シンボルデータを、車載カメラ1の1フレームの撮影時間よりも短い1/31秒程度の時間ごとに変化させている。
図11は、前方画像の一例を示す図である。図11に示すように、本発明では、ハイマウントランプ2の液晶パネル4の画像部分aが情報取得に必要であり、前方画像におけるその他の画像部分は情報取得に無関係である。また、先行車両の情報取得には、液晶パネル4に標示されたバーコード様データを読み取れればよい。
そこで、ハイマウントランプ抽出処理部11aは、前方画像を入力すると、図12に示すように、当該画像を数ライン(平行線)ごとに飛び飛びに1ラインずつ読み取り、濃淡画像をフーリエ変換(周波数成分へ変換)する(ステップST2)。なお、フーリエ変換には高速でフーリエ変換を行うFFT(高速フーリエ変換)が知られており、最近の半導体及びマイクロプロセッサの進歩で安価に実現できるようになっている。
そこで、ハイマウントランプ抽出処理部11aは、前方画像を入力すると、図12に示すように、当該画像を数ライン(平行線)ごとに飛び飛びに1ラインずつ読み取り、濃淡画像をフーリエ変換(周波数成分へ変換)する(ステップST2)。なお、フーリエ変換には高速でフーリエ変換を行うFFT(高速フーリエ変換)が知られており、最近の半導体及びマイクロプロセッサの進歩で安価に実現できるようになっている。
次に、ハイマウントランプ抽出処理部11aは、前方画像の1ライン分をフーリエ変換した結果に基本波と派生波があるか否かを判定する(ステップST3)。なお、基本波とその派生波は、バーコード様データに起因した周波数成分であり、バーコード様データがない画像部分のフーリエ変換結果には出現しない。また、帯の間隔が一定であれば、基本波のみが出現する。つまり、バーコード様のシンボルのうちの少なくとも一つにおいて、黒色の帯の幅を狭い幅及び広い幅を混在させることで、所定の情報をシンボル化することができ、このとき黒色の帯の幅に応じて、基本波に加えて、特定の周波数成分の派生波が出現する。
図13,14は、前方画像の1ライン分をフーリエ変換した結果を示すグラフであり、横軸が周波数、縦軸が信号強度である。図13は、図12のラインkの画像部分をフーリエ変換した結果を示している。ラインkの画像部分にはバーコード様データがないため、背景画像の周波数成分のみが得られる。図14(a)は、図12のラインnの画像部分をフーリエ変換した結果を示しており、図14(b)は、図12のラインmの画像部分をフーリエ変換した結果を示している。
基本波の周波数(基本周波数成分)は、バーコード様データにおける黒色の狭い方の帯幅に反比例し、当該先行車両と自車両の車間距離に正比例する。また、基本周波数成分は、背景画像の周波数成分と比べて強い信号強度となる。
派生波は、基本波の周波数以下の特定の周波数(例えば、基本波の周波数の2/3)で出現し、その信号強度は基本波よりも小さい。
従って、基本周波数成分及び派生波の特定周波数成分の有無を確認することで、フーリエ変換した画像部分が、前方車両の情報がシンボル化されたバーコード様データの画像部分であるか否かを判定できる。
派生波は、基本波の周波数以下の特定の周波数(例えば、基本波の周波数の2/3)で出現し、その信号強度は基本波よりも小さい。
従って、基本周波数成分及び派生波の特定周波数成分の有無を確認することで、フーリエ変換した画像部分が、前方車両の情報がシンボル化されたバーコード様データの画像部分であるか否かを判定できる。
図10の説明に戻る。1ラインの画像部分をフーリエ変換した結果に基本波と派生波がなかった場合(ステップST3;NO)、ハイマウントランプ抽出処理部11aは、ステップST1に戻り、前方画像における次のラインに対して上述の処理を繰り返す。
一方、1ラインの画像部分をフーリエ変換した結果に基本波と派生波がある場合(ステップST3;YES)、ハイマウントランプ抽出処理部11aは、当該ラインの画像部分をフーリエ変換して得られた基本波の周波数データを、距離演算部12へ出力する。
一方、1ラインの画像部分をフーリエ変換した結果に基本波と派生波がある場合(ステップST3;YES)、ハイマウントランプ抽出処理部11aは、当該ラインの画像部分をフーリエ変換して得られた基本波の周波数データを、距離演算部12へ出力する。
距離演算部12は、入力した基本波の周波数から自車両と先行車両との車間距離を演算する(ステップST4)。図12の前方画像において、自車両の手前に存在する先行車両のハイマウントランプ2で標示されたバーコード様データは、前方画像上で大きく撮影される。一方、この先行車両より自車両から離れた位置にある車両のハイマウントランプ2で標示されたバーコード様データは、自車両に近いものより前方画像上で小さく撮影される。
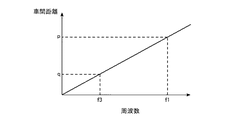
また、図14(a)及び図14(b)に示すように、自車両手前の先行車両に関するラインmの画像部分のフーリエ変換結果は、基本波の周波数f3とその派生波の周波数はf4である。この先行車両より、さらに自車両から離れた位置の先行車両に関するラインnの画像部分のフーリエ変換結果は、基本波の周波数f1とその派生波の周波数はf2である。
周波数f1>f3、f2>f4となり、自車両手前の先行車両に関するラインmの画像部分のフーリエ変換結果は、この先行車両よりさらに自車両から離れた位置の先行車両に関するラインnの画像部分のフーリエ変換結果よりも基本波及びその派生波の周波数が低くなる。従って、基本波や派生波の周波数を比較することで、ハイマウントランプ2が搭載された先行車両が自車両に対して近くにいるのか離れた位置にあるのかを認識できる。
また、図14(a)及び図14(b)に示すように、自車両手前の先行車両に関するラインmの画像部分のフーリエ変換結果は、基本波の周波数f3とその派生波の周波数はf4である。この先行車両より、さらに自車両から離れた位置の先行車両に関するラインnの画像部分のフーリエ変換結果は、基本波の周波数f1とその派生波の周波数はf2である。
周波数f1>f3、f2>f4となり、自車両手前の先行車両に関するラインmの画像部分のフーリエ変換結果は、この先行車両よりさらに自車両から離れた位置の先行車両に関するラインnの画像部分のフーリエ変換結果よりも基本波及びその派生波の周波数が低くなる。従って、基本波や派生波の周波数を比較することで、ハイマウントランプ2が搭載された先行車両が自車両に対して近くにいるのか離れた位置にあるのかを認識できる。
図15は、基本波の周波数と車間距離との関係を示す図である。バーコード様データにおける黒色の狭い方の帯幅が先行する全ての車両で同一であれば、図15に示すように、基本波の周波数と車間距離は比例関係となる。距離演算部12は、この関係を利用して、基本波の周波数から、この基本波が得られたバーコード様データを標示する先行車両との車間距離を求める。図15では、ラインnの画像部分をフーリエ変換して得られた先行車両との車間距離はpとなり、ラインmの画像部分をフーリエ変換して得られた先行車両との車間距離はqとなる。例えば、ラインnの画像部分をフーリエ変換して得られた基本波の周波数f1と、ラインmの画像部分をフーリエ変換して得られた基本波の周波数f3とは下記の関係になる。
f1:f3=p:q
f1:f3=p:q
上述のようにして車間距離が演算されると、ハイマウントランプ抽出処理部11aは、フーリエ変換した結果に基本波と派生波があった1ライン分の濃淡画像を、シンボル情報検出処理部11bへ出力する。シンボル情報検出処理部11bは、入力した1ライン分の濃淡画像の画像部分から、シンボルを読み取る(ステップST5)。読み取られたシンボルは、シンボル情報検出処理部11bから走行状態検出部13へ出力される。
走行状態検出部13は、図6に示したようなシンボルデータが取り得る数値の対応表に基づいて、シンボル情報検出処理部11bから得たシンボルが“フラグ”であるか否かを判定する(ステップST6)。
ここで、シンボルが“フラグ”でなければ(ステップST6;NO)、ステップST1へ戻り、上述の処理を繰り返す。
また、シンボルが“フラグ”である場合(ステップST6;YES)、シンボル情報検出処理部11bは、車載カメラ1で撮影された次のフレームの前方画像を入力し(ステップST7)、当該画像における同一ラインの画像部分から、シンボルを読み取る(ステップST8)。
走行状態検出部13は、図6に示したようなシンボルデータが取り得る数値の対応表に基づいて、シンボル情報検出処理部11bから得たシンボルが“フラグ”であるか否かを判定する(ステップST6)。
ここで、シンボルが“フラグ”でなければ(ステップST6;NO)、ステップST1へ戻り、上述の処理を繰り返す。
また、シンボルが“フラグ”である場合(ステップST6;YES)、シンボル情報検出処理部11bは、車載カメラ1で撮影された次のフレームの前方画像を入力し(ステップST7)、当該画像における同一ラインの画像部分から、シンボルを読み取る(ステップST8)。
次に、走行状態検出部13は、先行車両のハイマウントランプ2が標示するバーコード様データの同一ラインの画像部分から、全てのシンボルを読み取ったか否かを判定する(ステップST9)。例えば、走行状態検出部13が、バーコード様データで最後に標示される“CRC”のシンボルを読み取った場合に、全てのシンボルを読み取ったものと判定する。未だに読み取っていないシンボルがある場合(ステップST9;NO)、ステップST7に戻り、車載カメラ1により撮影された次のフレームの前方画像を順次入力して、上述の処理を繰り返し、“車両走行速度”、“運転操作状態”、“車間距離演算用のシンボル幅情報”、“CRC”を順次読み取る。また、全てのシンボルを読み取った場合(ステップST9;YES)、処理を終了する。
上述のようにして得られた自車両と先行車両の車間距離と、先行車両の運転操作及び走行の状態を示す情報は、距離演算部12及び走行状態検出部13から運転支援判断処理部14へ出力される。運転支援判断処理部14は、距離演算部12及び走行状態検出部13から入力した情報に基づいて、記憶部14aに記憶されている運転支援の内容を示す情報のうちから、運転者に提供すべき情報を選別する。
そして、音声発生部15が、運転支援判断処理部14により選別された運転支援の内容を伝える音声情報や警報音を出力する。もしくは、操作力発生部16が、運転支援判断処理部14により選別された運転支援の内容に基づいて、自車両のブレーキペダルの操作、あるいは、アクセルペダルの操作に応じたブレーキ力、あるいは、加速力を発生して自車両の制動、あるいは、加速の動作を行う。さらに、減速制御部17が、運転支援判断処理部14により選別された運転支援の内容に基づいて、自車両の車両走行速度の減速を制御する。
そして、音声発生部15が、運転支援判断処理部14により選別された運転支援の内容を伝える音声情報や警報音を出力する。もしくは、操作力発生部16が、運転支援判断処理部14により選別された運転支援の内容に基づいて、自車両のブレーキペダルの操作、あるいは、アクセルペダルの操作に応じたブレーキ力、あるいは、加速力を発生して自車両の制動、あるいは、加速の動作を行う。さらに、減速制御部17が、運転支援判断処理部14により選別された運転支援の内容に基づいて、自車両の車両走行速度の減速を制御する。
次に、図10のステップST5,8におけるシンボル読み取り処理の詳細を説明する。
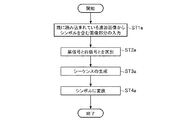
図16は、ラインごとの濃淡画像からシンボルを読み取る処理を示すフローチャートである。先ず、シンボル情報検出処理部11bが、ハイマウントランプ抽出処理部11aにより既に読み込まれている濃淡画像(前方画像)のうち、フーリエ変換の結果に基本波と派生波があったラインの画像部分を入力する(ステップST1a)。例えば、図12に示すラインn,mの画像部分が入力されたものとする。
図16は、ラインごとの濃淡画像からシンボルを読み取る処理を示すフローチャートである。先ず、シンボル情報検出処理部11bが、ハイマウントランプ抽出処理部11aにより既に読み込まれている濃淡画像(前方画像)のうち、フーリエ変換の結果に基本波と派生波があったラインの画像部分を入力する(ステップST1a)。例えば、図12に示すラインn,mの画像部分が入力されたものとする。
次に、シンボル情報検出処理部11bは、入力したラインの画像部分における黒信号と白信号とを区別する(ステップST2a)。例えば、入力した1ライン分の画像部分を、輝度値に関する所定の閾値を用いて2値化してから、当該ラインの2値化画像部分を走査することにより、黒信号と白信号とを区別する。
図17は、黒信号と白信号を区別する処理の概要を示す図である。図17に示す例は、ラインmの2値化画像部分を走査した結果である。ラインmの2値化画像部分をラインmに沿って走査することにより、ディジタル値“1”の白信号と、ディジタル値“0”の黒信号が得られる。
図17は、黒信号と白信号を区別する処理の概要を示す図である。図17に示す例は、ラインmの2値化画像部分を走査した結果である。ラインmの2値化画像部分をラインmに沿って走査することにより、ディジタル値“1”の白信号と、ディジタル値“0”の黒信号が得られる。
次いで、シンボル情報検出処理部11bは、走査結果のディジタル信号に基づき、黒い帯と白い帯(黒い帯同士の間隔)とが交互に現れるシーケンスを生成する(ステップST3a)。このとき、ディジタル値“0”の黒信号が得られる範囲と、ディジタル値“1”の白信号が得られる範囲によってそれぞれの帯が狭い幅(細バー)か広い幅(太バー)かも認識され、図17のようなシーケンスが得られる。
この後、シンボル情報検出処理部11bは、得られたシーケンスを、シンボルデータに変換する(ステップST4a)。すなわち、黒帯の幅とその間隔に基づいて、そのシーケンスが表すディジタル値を判別し、シンボルデータとする。
以上の処理が終了すると、シンボル情報検出処理部11bは、走行状態検出部13へシンボルデータを出力する。走行状態検出部13は、図6に示したようなシンボルデータが取り得る数値の対応表に基づいて、シンボル情報検出処理部11bで得られたシンボルの数値から、その内容を解析する。この結果、シンボルが“フラグ”であれば、車載カメラ1で撮影された次のフレームの画像を順次入力し、上記処理を繰り返してシンボルを順次出力する。このようにして、走行状態検出部13が、“車輌走行速度”、“運転操作状態”、“車間距離演算用のシンボル幅情報”を得る。
一方、最初の結果が“フラグ”でなければ、再度画像を入力し、バーコード様データの検出からやり直す。
以上の処理が終了すると、シンボル情報検出処理部11bは、走行状態検出部13へシンボルデータを出力する。走行状態検出部13は、図6に示したようなシンボルデータが取り得る数値の対応表に基づいて、シンボル情報検出処理部11bで得られたシンボルの数値から、その内容を解析する。この結果、シンボルが“フラグ”であれば、車載カメラ1で撮影された次のフレームの画像を順次入力し、上記処理を繰り返してシンボルを順次出力する。このようにして、走行状態検出部13が、“車輌走行速度”、“運転操作状態”、“車間距離演算用のシンボル幅情報”を得る。
一方、最初の結果が“フラグ”でなければ、再度画像を入力し、バーコード様データの検出からやり直す。
以上のように、この実施の形態1によれば、バーコード様のシンボルを標示する液晶パネル4と、自車両の運転操作及び走行の状態を検出する運転操作・走行状態検出部6と、運転操作・走行状態検出部6により検出された自車両の運転操作及び走行の状態に対応するシンボルのデータ列を所定時間ごとに順次標示するように、液晶パネル4を制御するハイマウントランプ制御部7とを備えた運転支援用情報提供装置3と、自車両の前方を撮影する車載カメラ1と、車載カメラ1により撮影された撮影画像から、先行車両に搭載された上記運転支援用情報提供装置3の液晶パネル4の画像を抽出するハイマウントランプ抽出処理部11aと、ハイマウントランプ抽出処理部11aにより抽出された液晶パネル4の画像から、当該液晶パネル4に標示されたバーコード様のシンボルを検出するシンボル情報検出処理部11bと、シンボル情報検出処理部11bにより検出されたシンボルに対応する先行車両の運転操作及び走行の状態を検出する走行状態検出部13と、走行状態検出部13により検出された先行車両の運転操作及び走行の状態に基づいて、予め設定した運転支援の内容を示す情報のうちから、運転者に提供すべき情報を選別し、当該選別した情報に基づいて自車両の運転支援を行う運転支援判断処理部14とを備えた車載運転支援装置9とを備える。このように構成することにより、簡易な構成で、先行車両の走行状態を的確に検出して効率よく運転支援することができる。
また、この実施の形態1によれば、バーコード様のシンボルの少なくとも1つが、当該シンボルの画像を周波数成分に変換(フーリエ変換)した場合に、帯状部の幅に応じた基本周波数成分とこれに派生する特定の周波数成分とを含む。さらに、ハイマウントランプ抽出処理部11aが、車載カメラ1により撮影された撮影画像をフーリエ変換し、帯状部の幅に応じた基本周波数成分とこれに派生する特定の周波数成分とを含むか否かに応じて、撮影画像から液晶パネル4の画像を抽出する。このようにすることで、車載運転支援装置9側で液晶パネル4の撮影画像からバーコード様のシンボルを含む画像部分を容易に抽出することができる。
さらに、この実施の形態1によれば、ハイマウントランプ抽出処理部11aにより抽出された液晶パネル4の画像のフーリエ変換結果に含まれる基本周波数成分及びこれに派生する特定の周波数成分の値から前方車両までの距離を算出する距離演算部12を備える。この構成を備えることにより、容易に先行車両との車間距離を算出することができる。
さらに、この実施の形態1によれば、ハイマウントランプ制御部7が、所定の速度単位で区分した車両の速度範囲ごとに対応付けた数値データに基づいて、運転操作・走行状態検出部6により検出された自車両の走行速度の速度範囲に対応する数値を示すシンボルのデータ列を所定時間ごとに順次標示するように、液晶パネル4を制御する。このようにすることにより、後続車両において、先行車両の走行速度の速度範囲に応じた運転支援を行うことができる。
さらに、この実施の形態1によれば、ハイマウントランプ制御部7が、アクセル操作及びブレーキ操作の状態ごとに対応付けた数値データに基づいて、運転操作・走行状態検出部6により検出された自車両のアクセル操作及びブレーキ操作の状態に対応する数値を示すシンボルのデータ列を所定時間ごとに順次標示するように、液晶パネル4を制御する。このようにすることで、後続車両において、先行車両のアクセル操作及びブレーキ操作の状態に応じた運転支援を行うことができる。
さらに、この実施の形態1によれば、ハイマウントランプ制御部7が、エアーバッグ作動の有無にそれぞれ対応付けた数値データに基づいて、運転操作・走行状態検出部6により検出された自車両でのエアーバッグ作動の有無に対応する数値を示すシンボルのデータ列を所定時間ごとに順次標示するように液晶パネル4を制御する。このようにすることにより、後続車両において、先行車両におけるエアーバッグの作動有無に応じた運転支援を行うことができる。
さらに、この実施の形態1によれば、ハイマウントランプ制御部7が、液晶パネル4に標示されるバーコード様のシンボルの実幅に対応する数値データ、あるいは車両の種類に対応する数値データに基づいて、自車両の液晶パネル4に標示されるバーコード様のシンボルの実幅に対応する数値を示すシンボル、あるいは自車両の種類に対応する数値を示すシンボルのデータ列を所定時間ごとに順次標示するように液晶パネル4を制御する。このようにすることにより、後続車両において、先行車両との車間距離の正確な測定が可能であり、また、先行車両の車種に応じた運転支援を行うことができる。
実施の形態2.
実施の形態2では、運転者のアクセル操作やブレーキ操作とは関係なく、つまり運転者が意図せず、主に道路の勾配等によって生じた自車両の加速や減速の状態を、後続車両に提供する。
図18は、この発明の実施の形態2に係る運転支援用情報提供装置の構成を示すブロック図である。図18において、実施の形態2に係る運転支援用情報提供装置3Aには、図2に示したエアーバッグ動作信号に替わって、進行方向のGセンサ18からの出力信号が運転操作・走行状態検出部6Aに入力される。進行方向のGセンサ18は、自車両の進行方向における加速度を検出するセンサである。運転操作・走行状態検出部6Aは、進行方向のGセンサ18から入力した自車両の進行方向における加減速度に基づいて、自車両の進行方向における加速や減速、緩減速、急減速の各状態を、自車両の走行状態として検出する。ハイマウントランプ制御部7Aは、アクセル及びブレーキ操作、車両走行速度に関しては、上記実施の形態1と同様に処理するとともに、運転操作・走行状態検出部6Aにより検出された自車両の進行方向における加速や減速、緩減速、急減速の状態に対応するシンボル“運転操作状態”を標示する制御信号8を生成し、液晶駆動回路5に出力する。
実施の形態2では、運転者のアクセル操作やブレーキ操作とは関係なく、つまり運転者が意図せず、主に道路の勾配等によって生じた自車両の加速や減速の状態を、後続車両に提供する。
図18は、この発明の実施の形態2に係る運転支援用情報提供装置の構成を示すブロック図である。図18において、実施の形態2に係る運転支援用情報提供装置3Aには、図2に示したエアーバッグ動作信号に替わって、進行方向のGセンサ18からの出力信号が運転操作・走行状態検出部6Aに入力される。進行方向のGセンサ18は、自車両の進行方向における加速度を検出するセンサである。運転操作・走行状態検出部6Aは、進行方向のGセンサ18から入力した自車両の進行方向における加減速度に基づいて、自車両の進行方向における加速や減速、緩減速、急減速の各状態を、自車両の走行状態として検出する。ハイマウントランプ制御部7Aは、アクセル及びブレーキ操作、車両走行速度に関しては、上記実施の形態1と同様に処理するとともに、運転操作・走行状態検出部6Aにより検出された自車両の進行方向における加速や減速、緩減速、急減速の状態に対応するシンボル“運転操作状態”を標示する制御信号8を生成し、液晶駆動回路5に出力する。
実際の道路環境、特に夜間においては、運転者が標識を見過ごしたり、慣れない道程での注意不足等のため、道路勾配に起因した予期しない車両の減速が発生する場合が多い。
このような状況が直近の先行車両で発生した場合は、後続車両が追突する危険性が高くなる。従って、先行車両の運転者が意図しないで発生した進行方向における減速や急減速の状態を、後続車両へいち早く情報提供することは非常に重要である。
また、車両の下り勾配での加速現象については、先行車両と後続車両の車間距離が一時的に大きくなる。このため、車両の追従走行制御や運転者自身の判断で過剰あるいは不要な加速(アクセル操作)をすることとなり、エコ走行の観点から好ましくない。
このような状況が直近の先行車両で発生した場合は、後続車両が追突する危険性が高くなる。従って、先行車両の運転者が意図しないで発生した進行方向における減速や急減速の状態を、後続車両へいち早く情報提供することは非常に重要である。
また、車両の下り勾配での加速現象については、先行車両と後続車両の車間距離が一時的に大きくなる。このため、車両の追従走行制御や運転者自身の判断で過剰あるいは不要な加速(アクセル操作)をすることとなり、エコ走行の観点から好ましくない。
そこで、この実施の形態2では、自車両の進行方向における加速度を検出する進行方向のGセンサ18を備え、運転操作・走行状態検出部6Aが、進行方向のGセンサ18の出力信号に基づいて、自車両の進行方向における加速や減速、緩減速、急減速の各状態を、自車両の走行状態として検出する。そして、ハイマウントランプ制御部7Aが、運転操作・走行状態検出部6Aにより検出された自車両の進行方向における加速や減速、緩減速、急減速の状態に対応するシンボルを標示する制御信号8を生成して液晶駆動回路5に出力する。
一般に車載用として使用されるGセンサは、例えばアナログの電圧信号で−2〜+2Gを0〜4V、あるいは、進行方向の減速度0Gを0Vにして1Gあたり1Vぐらいの電圧信号を出力するようになっている。この信号を受けて、運転操作・走行状態検出部6Aでは、自車両の走行状態を、緩減速、減速、急減速のそれぞれに応じた閾値を使って判別する。例えば、Gセンサ18で検出された進行方向の減速度が−0.05G〜−0.2Gである場合は“緩い減速”と判別し、進行方向の減速度が−0.2G〜−0.5Gである場合は“減速”と判別し、進行方向の減速度が−0.5G〜−1Gである場合は“急減速”と判別する。
ハイマウントランプ制御部7Aは、運転操作・走行状態検出部6Aにより判別された自車両の進行方向における減速の状態を入力すると、図6で示した対応表に基づいて、当該運転操作状態に対応する数値のシンボルデータを生成して、このシンボルを標示する制御信号8をハイマウントランプ2の液晶駆動回路5へ出力する。
液晶駆動回路5は、ハイマウントランプ制御部7Aの制御信号8に従い、当該シンボルを含むバーコード様データを液晶パネル4に標示させる。図6の例を用いて説明すると、自車両が道路勾配により緩減速する場合、“運転操作状態”のシンボルデータとして、数値“5”のシンボルを含むバーコード様データが標示される。
液晶駆動回路5は、ハイマウントランプ制御部7Aの制御信号8に従い、当該シンボルを含むバーコード様データを液晶パネル4に標示させる。図6の例を用いて説明すると、自車両が道路勾配により緩減速する場合、“運転操作状態”のシンボルデータとして、数値“5”のシンボルを含むバーコード様データが標示される。
一方、自車両が進行方向に加速する場合、運転者が意図しない(アクセル操作によらない)急加速は考えにくいので、運転操作・走行状態検出部6Aは、自車両の走行状態を、緩加速と加速のそれぞれに応じた閾値を使って判別する。例えば、Gセンサ18で検出された進行方向の加速度に関する閾値として+0.05Gを設定し、進行方向の加速度が、+0.05G以下である場合は“緩い加速”と判別し、上記閾値を超えるが急加速と判別するための閾値未満である場合は“加速”と判別する。ここでは、特にカットオフ時間や閾値のヒステリシスは考慮しない。
以上のように、この実施の形態2によれば、自車両の進行方向の加速度を検出するGセンサ18を備え、運転操作・走行状態検出部6Aが、Gセンサ18により検出された自車両の進行方向の加速度に基づいて、自車両の進行方向における加減速の状態を検出し、ハイマウントランプ制御部7Aが、複数の段階に区分した車両の進行方向における加減速の状態ごとに対応付けた数値データに基づいて、運転操作・走行状態検出部6Aにより検出された自車両の進行方向における加減速の状態の段階に対応する数値を示すシンボルのデータ列を所定時間ごとに順次標示するように液晶パネル4を制御する。このようにすることで、走行道路の勾配等に起因した運転者が意図しない自車両の進行方向における加減速の状態を、後続車両に伝達することができる。これにより、先行車両の進行方向における減速に起因した追突や渋滞の発生を防止することができ、また先行車両の進行方向における加速に起因した後続車両の不要な加速を抑制することができる。
実施の形態3.
実施の形態3では、先行車両が車間距離センサを搭載しており、さらに先行する車両との車間距離を、後続車両に提供する。
図19は、この発明の実施の形態3に係る運転支援用情報提供装置の構成を示すブロック図である。図19において、実施の形態3に係る運転支援用情報提供装置3Bでは、運転操作・走行状態検出部6Bが、図2に示したエアーバッグ動作信号を入力せず、車間距離演算部20が、車間距離センサ19に検出された先行車両のプローブ情報に基づいて、自車両と同じ車線を走行する先行車両との車間距離を算出する。
ハイマウントランプ制御部7Bは、運転操作・走行状態検出部6Bから入力されるアクセル及びブレーキ操作、車両走行速度に関しては、上記実施の形態1と同様に処理するとともに、車間距離演算部20により算出された先行車両と自車両との車間距離に対応した“車間距離演算用のシンボル幅情報”のシンボルを標示する制御信号8を生成し、液晶駆動回路5に出力する。液晶駆動回路5は、ハイマウントランプ制御部7Bの制御信号8に従って液晶パネル4にバーコード様データを標示する。
実施の形態3では、先行車両が車間距離センサを搭載しており、さらに先行する車両との車間距離を、後続車両に提供する。
図19は、この発明の実施の形態3に係る運転支援用情報提供装置の構成を示すブロック図である。図19において、実施の形態3に係る運転支援用情報提供装置3Bでは、運転操作・走行状態検出部6Bが、図2に示したエアーバッグ動作信号を入力せず、車間距離演算部20が、車間距離センサ19に検出された先行車両のプローブ情報に基づいて、自車両と同じ車線を走行する先行車両との車間距離を算出する。
ハイマウントランプ制御部7Bは、運転操作・走行状態検出部6Bから入力されるアクセル及びブレーキ操作、車両走行速度に関しては、上記実施の形態1と同様に処理するとともに、車間距離演算部20により算出された先行車両と自車両との車間距離に対応した“車間距離演算用のシンボル幅情報”のシンボルを標示する制御信号8を生成し、液晶駆動回路5に出力する。液晶駆動回路5は、ハイマウントランプ制御部7Bの制御信号8に従って液晶パネル4にバーコード様データを標示する。
このようにすることで、後続車両に搭載された車載運転支援装置9は、自車両と先行車両との車間距離に加え、先行車両とさらに先行する車両との間の車間距離を認識することができる。これにより、自車両が、先行車両とさらに先行する車両との間での走行状態に起因した交通障害等を回避する運転支援を実施可能である。例えば、ある道路を走行する各車両が、先行車両との車間距離及び先行車両とさらに先行する車両との車間距離を把握して走行することにより、渋滞していない状況から、激しい渋滞や車両の流れが停滞する状況へ移行する道路状況(サグ(sag)といわれる停止の車列)に移行することを回避できる。
以上のように、この実施の形態3によれば、自車両と同じ車線を走行する先行車両を検出する車間距離センサ19を備え、運転操作・走行状態検出部6Bが、車間距離センサ19で検出された先行車両の検出情報に基づいて、自車両と同じ車線を走行する先行車両との車間距離を検出し、ハイマウントランプ制御部7Bが、複数に区分した車間距離範囲ごとに対応付けた数値データに基づいて、運転操作・走行状態検出部6Bにより検出された車間距離の車間距離範囲に対応する数値を示すシンボルのデータ列を所定時間ごとに順次標示するように液晶パネル4を制御する。このようにすることで、自車両が、先行車両とさらに先行する車両との間での走行状態に起因した交通障害等を回避する運転支援を実施できる。
実施の形態4.
実施の形態4は、アクセル操作・ブレーキ操作の信号、車輪の回転速度の信号など、車両側で出力される信号との接続がなくても、車両に搭載することができる運転支援用情報提供装置について述べる。
図20は、この発明の実施の形態4に係る運転支援用情報提供装置の構成を示すブロック図である。図20において、実施の形態4に係る運転支援用情報提供装置3Cは、ハイマウントランプ2、ハイマウントランプ制御部7C、進行方向のGセンサ18、運転状況検出部21、電池・電源回路22及び車体装着部23を一つの筐体に一体化して構成される。
運転状況検出部21は、進行方向のGセンサ18から入力した自車両の進行方向における加減速度に基づいて、自車両の進行方向における加速や減速、緩減速、急減速の各状態を検出する構成部である。また、電池・電源回路22は、車両側とは無関係に、運転支援用情報提供装置3C内の各構成部へ電源を供給する回路である。車体装着部23は、運転支援用情報提供装置3Cを車両へ装着する構成部であり、車両内の信号線と接続することなく、運転支援用情報提供装置3Cを物理的に装着する。
実施の形態4は、アクセル操作・ブレーキ操作の信号、車輪の回転速度の信号など、車両側で出力される信号との接続がなくても、車両に搭載することができる運転支援用情報提供装置について述べる。
図20は、この発明の実施の形態4に係る運転支援用情報提供装置の構成を示すブロック図である。図20において、実施の形態4に係る運転支援用情報提供装置3Cは、ハイマウントランプ2、ハイマウントランプ制御部7C、進行方向のGセンサ18、運転状況検出部21、電池・電源回路22及び車体装着部23を一つの筐体に一体化して構成される。
運転状況検出部21は、進行方向のGセンサ18から入力した自車両の進行方向における加減速度に基づいて、自車両の進行方向における加速や減速、緩減速、急減速の各状態を検出する構成部である。また、電池・電源回路22は、車両側とは無関係に、運転支援用情報提供装置3C内の各構成部へ電源を供給する回路である。車体装着部23は、運転支援用情報提供装置3Cを車両へ装着する構成部であり、車両内の信号線と接続することなく、運転支援用情報提供装置3Cを物理的に装着する。
この実施の形態4に係る運転支援用情報提供装置3Cは、自車両の車両情報が伝播する信号線と接続せずに取り付けられる。つまり、運転状況検出部21が、自装置3Cに内蔵されたGセンサ18の出力信号から、自車両の運転状況(緩減速、普通の減速、急減速、加速)を検出する。ハイマウントランプ制御部7Cは、運転状況検出部21に検出された自車両の進行方向における加速や減速、緩減速、急減速の状態に対応する“運転操作状態”のシンボルを標示する制御信号8を生成して液晶駆動回路5に出力する。液晶駆動回路5は、ハイマウントランプ制御部7Cの制御信号8に従って、液晶パネル4にバーコード様データを標示する。
以上のように、この実施の形態4によれば、バーコード様のシンボルを標示する液晶パネル4と、自車両の進行方向の加速度を検出するGセンサ18と、Gセンサ18により検出された自車両の進行方向の加速度に基づいて、自車両の進行方向における加減速の状態を検出する運転状況検出部21と、複数に区分した車間距離範囲ごとに対応する数値データに基づいて、運転状況検出部21により検出された車間距離の車間距離範囲に対応する数値を示すシンボルのデータ列を所定時間ごとに順次標示するように液晶パネル4を制御するハイマウントランプ制御部7Cとを備え、液晶パネル4、Gセンサ18、運転状況検出部21及びハイマウントランプ制御部7Cを一つの筐体に設ける。このように構成することで、車両情報がなくても、自装置3Cで検出された自車両の運転状況に基づいて、液晶パネル4に標示するシンボルデータを決定することから、異なる車両にも後付けで搭載できる。これにより、汎用性の高い運転支援用情報提供装置を実現することができる。
実施の形態5.
実施の形態5は、運転支援用情報提供装置と車載運転支援装置を互いに接続して1台の車両に搭載した場合について示す。
図21は、この発明の実施の形態5に係る運転支援用情報提供装置の構成を示すブロック図である。図21において、実施の形態5に係る運転支援用情報提供装置3Dでは、運転操作・走行状態検出部6Cが、図2に示したエアーバッグ動作信号を入力せず、ハイマウントランプ制御部7Dが、車載運転支援装置9の前段処理部10で得られた先行車両の車両走行速度及び車間距離に対応した“車両走行速度”のシンボル及び“車間距離演算用のシンボル幅情報”のシンボルを標示する制御信号8を生成して、液晶駆動回路5に出力する。液晶駆動回路5は、ハイマウントランプ制御部7Dの制御信号8に従って、液晶パネル4にバーコード様データを標示する。
実施の形態5は、運転支援用情報提供装置と車載運転支援装置を互いに接続して1台の車両に搭載した場合について示す。
図21は、この発明の実施の形態5に係る運転支援用情報提供装置の構成を示すブロック図である。図21において、実施の形態5に係る運転支援用情報提供装置3Dでは、運転操作・走行状態検出部6Cが、図2に示したエアーバッグ動作信号を入力せず、ハイマウントランプ制御部7Dが、車載運転支援装置9の前段処理部10で得られた先行車両の車両走行速度及び車間距離に対応した“車両走行速度”のシンボル及び“車間距離演算用のシンボル幅情報”のシンボルを標示する制御信号8を生成して、液晶駆動回路5に出力する。液晶駆動回路5は、ハイマウントランプ制御部7Dの制御信号8に従って、液晶パネル4にバーコード様データを標示する。
実施の形態5に係る前段処理部10は、車載カメラ1により撮影された前方の撮影画像から、先行車両の車両走行速度及び自車両と先行車両との車間距離を検出する。例えば、先行車両が、本発明に係る運転支援用情報提供装置を搭載していれば、その液晶パネル4に標示されたバーコード様データから、上記実施の形態1と同様にして、距離演算部12及び走行状態検出部13により先行車両の車両走行速度及び自車両と先行車両との車間距離が検出される。
以上のように、この実施の形態5によれば、ハイマウントランプ制御部7Dが、複数に区分した車間距離範囲ごとに対応する数値データに基づいて、上記車載運転支援装置9の距離演算部12により算出された自車両と先行車両との車間距離の車両距離範囲に対応する数値を示すシンボルのデータ列を、所定時間ごとに順次標示するように液晶パネル4を制御する。このようにすることで、上記実施の形態1〜4で説明した運転支援用情報提供装置及び車載運転支援装置における効果を同時に得ることができる。
実施の形態6.
実施の形態6に係る車載運転支援装置は、車載カメラ1の視野角(画角)を切り替えることで、画像処理部が自車両の前方の距離に応じて、先行車両の液晶パネル4に標示されたバーコード様データを検出する。なお、実施の形態6に係る車載運転支援装置の構成は、上記実施の形態1で図9を用いた構成と基本的に同様であるが、前段処理部10における画像処理部11によって車載カメラ1が視野角を切り替える点で異なる。従って、以降で装置構成を説明する場合は、図9を参照する。
実施の形態6に係る車載運転支援装置は、車載カメラ1の視野角(画角)を切り替えることで、画像処理部が自車両の前方の距離に応じて、先行車両の液晶パネル4に標示されたバーコード様データを検出する。なお、実施の形態6に係る車載運転支援装置の構成は、上記実施の形態1で図9を用いた構成と基本的に同様であるが、前段処理部10における画像処理部11によって車載カメラ1が視野角を切り替える点で異なる。従って、以降で装置構成を説明する場合は、図9を参照する。
図22は、前方画像と距離ゾーンとの関係を示す図である。車載カメラ1の撮影画像上(イメージセンサ上)では、車載カメラ1に近い側(自車両側)が上記撮影画像の下辺側となり、車載カメラ1から遠い側(先行車両側)は、上記撮影画像の上辺側となる。
すなわち、図22に示すように、撮影画像の下辺側から近距離ゾーン、中距離ゾーン、遠距離ゾーンとなる。このような距離ゾーンは、車載カメラ1の仰角(下向き角)に依存する。従って、適切な仰角を決めて車載カメラ1を設置すれば、自車両のずっと先を走行する車両や背景画像は、遠距離ゾーンの画像範囲に含まれる。また、自車両の直近の先行車両又はその先を走行する車両に搭載されたハイマウントランプ2は、近距離ゾーン又は中距離ゾーンの画像範囲に含まれる。
すなわち、図22に示すように、撮影画像の下辺側から近距離ゾーン、中距離ゾーン、遠距離ゾーンとなる。このような距離ゾーンは、車載カメラ1の仰角(下向き角)に依存する。従って、適切な仰角を決めて車載カメラ1を設置すれば、自車両のずっと先を走行する車両や背景画像は、遠距離ゾーンの画像範囲に含まれる。また、自車両の直近の先行車両又はその先を走行する車両に搭載されたハイマウントランプ2は、近距離ゾーン又は中距離ゾーンの画像範囲に含まれる。
図23は、この発明の実施の形態6に係る運転支援システムの概要を示す図である。図23(a)は、車両Aに搭載される車載運転支援装置が上記近距離ゾーンに対応した近距離モードである場合を示しており、図23(b)は車両Aに搭載される車載運転支援装置が上記遠距離ゾーンに対応した遠距離モードである場合を示している。
実施の形態6に係る車載運転支援装置9は、車載カメラ1の視野角を広角度として遠距離の物体分解能は低下するが、自車両の直近を走行する先行車両が撮影範囲に含められる近距離モードを有し、また、車載カメラ1の視野角を狭角度として自車両の直近の物体が撮影範囲から漏れるが、自車両から遠距離の先行車両を撮影できる遠距離モードを有し、車載カメラ1の視野角を近距離モードと遠距離モードの中間の角度とした上記中距離ゾーンに対応する中距離モードを有する。
実施の形態6に係る車載運転支援装置9は、車載カメラ1の視野角を広角度として遠距離の物体分解能は低下するが、自車両の直近を走行する先行車両が撮影範囲に含められる近距離モードを有し、また、車載カメラ1の視野角を狭角度として自車両の直近の物体が撮影範囲から漏れるが、自車両から遠距離の先行車両を撮影できる遠距離モードを有し、車載カメラ1の視野角を近距離モードと遠距離モードの中間の角度とした上記中距離ゾーンに対応する中距離モードを有する。
例えば、自車両から近い所定の距離範囲(例えば30mまでの距離範囲)にある先行車両(車両C)のハイマウントランプ2を情報取得対象とする場合、図23(a)に示すように、車載カメラ1の視野角を所定の範囲だけ広くした近距離モードを設定する。また、自車両から遠い所定の距離範囲(例えば50m以上の距離範囲)にある先行車両(車両B)のハイマウントランプ2を情報取得対象とする場合、図23(b)に示すように、車載カメラ1の視野角を所定の範囲だけ狭くした遠距離モードを設定する。さらに、近距離モードと遠距離モードの中間に位置する距離範囲(例えば20mから50mまでの距離範囲)にある先行車両のハイマウントランプ2を情報取得対象とする場合は、車載カメラ1の視野角を近距離と遠距離の中間の範囲とした中距離モードを設定する。
次に動作について説明する。
(1)先行車両に関する情報の取得処理について
図24は、実施の形態6に係る車載運転支援装置による先行車両に関する情報の取得処理を示すフローチャートである。この図に沿って先行車両に関する情報の取得処理の詳細を説明する。
先ず、車載カメラ1により撮影された前方画像(先行車両を被写体に含む濃淡画像)を入力する(ステップST1b)。なお、車載カメラ1では、通常の車載カメラと同様に、例えば、30フレーム/秒で撮影を行い、先行車両に搭載されたハイマウントランプ2の液晶パネル4は、バーコード様データを構成する各シンボルデータを、車載カメラ1の1フレームの撮影時間よりも短い1/31秒程度の時間ごとに変化させている。
次に、ハイマウントランプ抽出処理部11aは、入力した前方画像を数ライン(平行線)ごとに飛び飛びに1ラインずつ読み取り、濃淡画像をフーリエ変換する(ステップST2b)。
(1)先行車両に関する情報の取得処理について
図24は、実施の形態6に係る車載運転支援装置による先行車両に関する情報の取得処理を示すフローチャートである。この図に沿って先行車両に関する情報の取得処理の詳細を説明する。
先ず、車載カメラ1により撮影された前方画像(先行車両を被写体に含む濃淡画像)を入力する(ステップST1b)。なお、車載カメラ1では、通常の車載カメラと同様に、例えば、30フレーム/秒で撮影を行い、先行車両に搭載されたハイマウントランプ2の液晶パネル4は、バーコード様データを構成する各シンボルデータを、車載カメラ1の1フレームの撮影時間よりも短い1/31秒程度の時間ごとに変化させている。
次に、ハイマウントランプ抽出処理部11aは、入力した前方画像を数ライン(平行線)ごとに飛び飛びに1ラインずつ読み取り、濃淡画像をフーリエ変換する(ステップST2b)。
次いで、ハイマウントランプ抽出処理部11aは、前方画像の1ライン分をフーリエ変換した結果に基本波と派生波があるか否かを判定する(ステップST3b)。1ラインの画像部分をフーリエ変換した結果に基本波と派生波がなかった場合(ステップST3b;NO)、ハイマウントランプ抽出処理部11aは、ステップST1bに戻って、前方画像における次のラインに対して、上述の処理を繰り返す。
一方、1ラインの画像部分をフーリエ変換した結果に基本波と派生波がある場合(ステップST3b;YES)、ハイマウントランプ抽出処理部11aは、この基本波の周波数データを距離演算部12へ出力する。
一方、1ラインの画像部分をフーリエ変換した結果に基本波と派生波がある場合(ステップST3b;YES)、ハイマウントランプ抽出処理部11aは、この基本波の周波数データを距離演算部12へ出力する。
距離演算部12は、基本波の周波数データを入力すると、現時点で遠距離モードが設定されているか否かを判定する(ステップST4b)。ここで、遠距離モードが設定されている場合(ステップST4b;YES)、距離演算部12は、遠距離モードの距離演算換算係数を選択する(ステップST5b)。また、近距離モードが設定されていない場合(ステップST4b;NO)、距離演算部12は、近距離モードの距離演算換算係数を選択する(ステップST6b)。
図25は、各距離モードに対応する基本波の周波数と車間距離の関係を示す図である。図25に示すように、1ラインの画像部分をフーリエ変換して得られた基本波の周波数とこれに対応する車間距離との関係は、距離モードに対応したものとなる。
そこで、距離演算部12には、各距離モードに応じた距離演算換算係数が設定される。例えば、同じ基本波の周波数f1において、近距離モードの車間距離と遠距離モードの車間距離には、p1:p2の関係があるので、近距離モードの距離演算換算係数はp1/(p1+p2)、遠距離モードの距離演算換算係数はp2/(p1+p2)となる。
距離演算部12は、ハイマウントランプ抽出処理部11aから入力した基本波の周波数と、選択した距離演算係数とを用いて、自車両と先行車両との車間距離を演算する(ステップST7b)。
図25は、各距離モードに対応する基本波の周波数と車間距離の関係を示す図である。図25に示すように、1ラインの画像部分をフーリエ変換して得られた基本波の周波数とこれに対応する車間距離との関係は、距離モードに対応したものとなる。
そこで、距離演算部12には、各距離モードに応じた距離演算換算係数が設定される。例えば、同じ基本波の周波数f1において、近距離モードの車間距離と遠距離モードの車間距離には、p1:p2の関係があるので、近距離モードの距離演算換算係数はp1/(p1+p2)、遠距離モードの距離演算換算係数はp2/(p1+p2)となる。
距離演算部12は、ハイマウントランプ抽出処理部11aから入力した基本波の周波数と、選択した距離演算係数とを用いて、自車両と先行車両との車間距離を演算する(ステップST7b)。
上述のようにして車間距離が演算されると、ハイマウントランプ抽出処理部11aは、フーリエ変換した結果に基本波と派生波があったラインの濃淡画像を、シンボル情報検出処理部11bへ出力する。シンボル情報検出処理部11bは、入力したラインの濃淡画像部分からシンボルを読み取る(ステップST8b)。読み取られたシンボルは、シンボル情報検出処理部11bから走行状態検出部13へ出力される。
走行状態検出部13は、図6に示したようなシンボルデータが取り得る数値の対応表に基づいて、シンボル情報検出処理部11bから得たシンボルが“フラグ”であるか否かを判定する(ステップST9b)。
ここで、シンボルが“フラグ”でなければ(ステップST9b;NO)、ステップST1bへ戻り、上述の処理を繰り返す。
また、シンボルが“フラグ”である場合(ステップST9b;YES)、シンボル情報検出処理部11bは、走行状態検出部13からシンボルが“フラグ”である旨を受けると、車載カメラ1により撮影された次のフレームの前方画像を入力し(ステップST10b)、当該画像における同一ラインの画像部分から、シンボルを読み取る(ステップST11b)。
走行状態検出部13は、図6に示したようなシンボルデータが取り得る数値の対応表に基づいて、シンボル情報検出処理部11bから得たシンボルが“フラグ”であるか否かを判定する(ステップST9b)。
ここで、シンボルが“フラグ”でなければ(ステップST9b;NO)、ステップST1bへ戻り、上述の処理を繰り返す。
また、シンボルが“フラグ”である場合(ステップST9b;YES)、シンボル情報検出処理部11bは、走行状態検出部13からシンボルが“フラグ”である旨を受けると、車載カメラ1により撮影された次のフレームの前方画像を入力し(ステップST10b)、当該画像における同一ラインの画像部分から、シンボルを読み取る(ステップST11b)。
次に、走行状態検出部13は、先行車両のハイマウントランプ2が標示するバーコード様データの同一ラインの画像部分から、全てのシンボルを読み取ったか否かを判定する(ステップST12b)。例えば、走行状態検出部13が、バーコード様データで最後に標示される“CRC”のシンボルを読み取った場合に、全てのシンボルを読み取ったものと判定する。
未だに読み取っていないシンボルがある場合(ステップST12b;NO)、ステップST10bに戻り、車載カメラ1により撮影された次のフレームの前方画像を順次入力して、上述の処理を繰り返し、“車両走行速度”、“運転操作状態”、“車間距離演算用のシンボル幅情報”、“CRC”を順次読み取る。また、全てのシンボルを読み取った場合(ステップST12b;YES)、処理を終了する。
未だに読み取っていないシンボルがある場合(ステップST12b;NO)、ステップST10bに戻り、車載カメラ1により撮影された次のフレームの前方画像を順次入力して、上述の処理を繰り返し、“車両走行速度”、“運転操作状態”、“車間距離演算用のシンボル幅情報”、“CRC”を順次読み取る。また、全てのシンボルを読み取った場合(ステップST12b;YES)、処理を終了する。
(2)距離モードの切り替えについて
例えば、図23(b)に示すように、自車両Aと先行車両Bの車間距離が大きく、自車両Aに搭載された車載運転支援装置9には、先行車両Bを対象とする遠距離モードが設定されていた場合を考える。実際の道路環境では、先行車両Bとの車間距離が大きい場合、図23(b)に示すように、割り込み車両Dが自車両Aの走行車線上に進入してくることが考えられる。この割り込み車両Dが、自車両Aの走行車線上の近距離モードに対応する距離範囲に進入した場合、遠距離モードでの車載カメラ1の視野角では当該車両Dが撮影範囲から漏れる可能性がある。従って、距離モードは固定的に設定するのではなく、所定の周期で切り替えることが望ましい。
例えば、図23(b)に示すように、自車両Aと先行車両Bの車間距離が大きく、自車両Aに搭載された車載運転支援装置9には、先行車両Bを対象とする遠距離モードが設定されていた場合を考える。実際の道路環境では、先行車両Bとの車間距離が大きい場合、図23(b)に示すように、割り込み車両Dが自車両Aの走行車線上に進入してくることが考えられる。この割り込み車両Dが、自車両Aの走行車線上の近距離モードに対応する距離範囲に進入した場合、遠距離モードでの車載カメラ1の視野角では当該車両Dが撮影範囲から漏れる可能性がある。従って、距離モードは固定的に設定するのではなく、所定の周期で切り替えることが望ましい。
そこで、実施の形態6では、距離演算部12が、車輪速パルスを入力して自車両の車両走行速度をモニタし、自車両の車両走行速度に応じて距離モードを自動的に切り替える。ここでは、車両走行速度が速いほど車載カメラ1の視野角を狭くする。
例えば、近距離モードと遠距離モードの2モードで切り替えを行う場合、車両走行速度が、0〜40km/hから50km/hまでの速度範囲で近距離モード(広角度)とし、50km/h以上の速度範囲で遠距離モード(狭角度)とする。
また、距離モードの切り替えの速度範囲の閾値速度にヒステリシスを設ける。つまり、自車両の車両走行速度が近距離モードから遠距離モードの速度範囲になった場合、所定の時間だけ近距離モードに戻らないように、遠距離モードと判定する閾値速度にヒステリシス(閾値速度を下げる)を設ける。反対に、自車両の車両走行速度が遠距離モードから近距離モードになった場合においても、所定の時間だけ遠距離モードに戻らないように、近距離モードと判定する閾値速度にヒステリシスを設ける(閾値速度を上げる)。
近距離、中距離、遠距離の3モードの場合は、例えば、車両走行速度が、20km/hから30km/hまでの速度範囲で近距離モード(広角度)とし、30km/hから60km/hまでの速度範囲で近距離モード(中間角度)とし、70km/h以上の速度範囲で遠距離モード(狭角度)とする。この場合も同様に、距離モードの切り替えの速度範囲の閾値速度にヒステリシスを設ける。
例えば、近距離モードと遠距離モードの2モードで切り替えを行う場合、車両走行速度が、0〜40km/hから50km/hまでの速度範囲で近距離モード(広角度)とし、50km/h以上の速度範囲で遠距離モード(狭角度)とする。
また、距離モードの切り替えの速度範囲の閾値速度にヒステリシスを設ける。つまり、自車両の車両走行速度が近距離モードから遠距離モードの速度範囲になった場合、所定の時間だけ近距離モードに戻らないように、遠距離モードと判定する閾値速度にヒステリシス(閾値速度を下げる)を設ける。反対に、自車両の車両走行速度が遠距離モードから近距離モードになった場合においても、所定の時間だけ遠距離モードに戻らないように、近距離モードと判定する閾値速度にヒステリシスを設ける(閾値速度を上げる)。
近距離、中距離、遠距離の3モードの場合は、例えば、車両走行速度が、20km/hから30km/hまでの速度範囲で近距離モード(広角度)とし、30km/hから60km/hまでの速度範囲で近距離モード(中間角度)とし、70km/h以上の速度範囲で遠距離モード(狭角度)とする。この場合も同様に、距離モードの切り替えの速度範囲の閾値速度にヒステリシスを設ける。
また、近距離モードと遠距離モードの2モードで切り替えを行う場合、遠距離モードが設定されているとき、周期的かつ一時的に近距離モードに切り替えてもよい。
例えば、0.6秒間を一周期として遠距離モードを0.5秒間だけ継続して、その後に0.1秒間だけ一時的に近距離モードへ切り替える。このようにすることで、自車両の走行車線への急な割り込みがあっても、実施の形態6に係る車載運転支援装置9は、当該割り込み車両から提供される情報を得ることができる。
例えば、0.6秒間を一周期として遠距離モードを0.5秒間だけ継続して、その後に0.1秒間だけ一時的に近距離モードへ切り替える。このようにすることで、自車両の走行車線への急な割り込みがあっても、実施の形態6に係る車載運転支援装置9は、当該割り込み車両から提供される情報を得ることができる。
また、先行車両との車間距離が大きくなるほど、車両の割り込みが発生しやすいことを考慮して距離モードを切り替えてもよい。つまり、遠距離モード及び近距離モードを設定する周期を、先行車両との車間距離に応じて変更する。すなわち近距離モードを設定する割合を大きくする(頻度を上げる)。例えば、距離演算部12により算出された車間距離が50m程度であれば、0.6秒間を一周期として遠距離モードを0.5秒間だけ継続し、その後に0.1秒間だけ一時的に近距離モードへ切り替える。続いて、車間距離が70m程度に広がった場合、一周期を0.4秒間として遠距離モードを0.3秒間だけ継続しその後に0.1秒間だけ一時的に近距離モードへ切り替える。このようにしても、割り込み車両から提供される情報を的確に取得することができる。
以上のように、この実施の形態6によれば、車載カメラ1が、視野角変更可能であり、距離演算部12が、車載カメラ1の視野角に応じて自車両からの距離を区分した距離モードが設定されており、ハイマウントランプ抽出処理部11aにより抽出された液晶パネル4の画像のフーリエ変換結果に含まれる基本周波数成分及びこれに派生する特定の周波数成分の値と、距離モードに応じて設定された換算係数を用いて、自車両と先行車両の車間距離を算出する。この構成において、特に車載カメラ1の視野角を自車両の車両走行速度に応じて変更して距離モードが切り替えたり、あるいは、所定の周期ごとに距離モードを切り替える。このように車載カメラ1の視野角(画角)に応じた距離モードを設定することで、先行車両のハイマウントランプ制御部から的確に情報を得ることができる。
実施の形態7.
上記実施の形態1〜6では、所定時間ごとに標示できるシンボル(シンボル列)の長さには制限があるため、提供情報の種類や内容が詳細になると1つのシンボル列が時系列でサイクリックに戻るまでの時間が長くなる。従って、車載運転支援装置側でバーコード様データを背景画像の中から抽出するための遅れ時間が増大し、提供情報の全てを取得できない場合が発生し得る。
そこで、この実施の形態7では、バーコード様データを標示する液晶パネルと、複数のLED(Light Emitting Diode)の点灯状態に応じた情報を提供するランプ部と組み合わせたハイマウントランプを設けている。このランプ部は、複数のLEDの点灯状態(点灯パターン)を提供情報の種類や内容に応じて設定すればよいため、車載運転支援装置での情報抽出の遅れを防ぐことができる。
上記実施の形態1〜6では、所定時間ごとに標示できるシンボル(シンボル列)の長さには制限があるため、提供情報の種類や内容が詳細になると1つのシンボル列が時系列でサイクリックに戻るまでの時間が長くなる。従って、車載運転支援装置側でバーコード様データを背景画像の中から抽出するための遅れ時間が増大し、提供情報の全てを取得できない場合が発生し得る。
そこで、この実施の形態7では、バーコード様データを標示する液晶パネルと、複数のLED(Light Emitting Diode)の点灯状態に応じた情報を提供するランプ部と組み合わせたハイマウントランプを設けている。このランプ部は、複数のLEDの点灯状態(点灯パターン)を提供情報の種類や内容に応じて設定すればよいため、車載運転支援装置での情報抽出の遅れを防ぐことができる。
図26は、この発明の実施の形態7に係る運転支援用情報提供装置のハイマウントランプを示す図である。図26に示す実施の形態7に係るハイマウントランプ2Aでは、枠の上辺に沿って複数のLED4a−1〜4a−6,4b−1,4b−2(LED1〜8)が配置され、枠内に液晶パネル4が配置される。なお、ハイマウントランプ2Aの外枠は自車両の後部に搭載可能な大きさであるとよい。
液晶パネル4は、上記実施の形態1〜6と同様にバーコード様データを標示する。
ここで、LED4a−1〜4a−6は、車両走行情報提供用のLED(番号1〜6)であり、LED4b−1,4b−2は、車間距離検出用のLED(LED4a〜4d)間の実距離データ提供用のLED(番号7,8)である。LED4f−1〜4f−6,4g−1,4g−2からなるLED列を、LEDがオンでディジタル値“1”、LEDがオフでディジタル値“0”となる8ビットのディジタルデータとみなして、その点灯状態と自車両の運転操作及び走行の状態とを対応付ける。このLED列の点灯状態と自車両の運転操作及び走行の状態との対応関係を情報コードと呼称する。なお、LED列の点灯状態と自車両の運転操作及び走行の状態との対応の規定は、予め決定しておくのが望ましい。
ここで、LED4a−1〜4a−6は、車両走行情報提供用のLED(番号1〜6)であり、LED4b−1,4b−2は、車間距離検出用のLED(LED4a〜4d)間の実距離データ提供用のLED(番号7,8)である。LED4f−1〜4f−6,4g−1,4g−2からなるLED列を、LEDがオンでディジタル値“1”、LEDがオフでディジタル値“0”となる8ビットのディジタルデータとみなして、その点灯状態と自車両の運転操作及び走行の状態とを対応付ける。このLED列の点灯状態と自車両の運転操作及び走行の状態との対応関係を情報コードと呼称する。なお、LED列の点灯状態と自車両の運転操作及び走行の状態との対応の規定は、予め決定しておくのが望ましい。
図27は、実施の形態7に係る運転支援用情報提供装置の構成を示すブロック図である。図27において、実施の形態7に係る運転支援用情報提供装置3Eは、ハイマウントランプ2AのLED4a−1〜4a−6,4b−1,4b−2の点灯状態及び液晶パネル4に標示したバーコード様データを利用して自車両に関する情報を後続車両へ伝達する。その構成として、ハイマウントランプ2A、運転操作・走行状態検出部6とハイマウントランプ制御部7を備える。また、ハイマウントランプ2Aは、LED4a−1〜4a−6,4b−1,4b−2、液晶パネル4、及び液晶・LED駆動回路5Aを備える。
液晶・LED駆動回路5Aは、ハイマウントランプ2Aの駆動回路であり、ハイマウントランプ制御部7からの制御信号8に従って、液晶パネル4にバーコード様データを標示し、LED4a−1〜4a−6,4b−1,4b−2を点灯する回路である。
運転操作・走行状態検出部6は、自車両の運転操作及び走行の状態を検出する構成部である。例えば、ブレーキ操作信号、アクセル操作信号、車輪速パルス、エアーバッグ動作信号(衝突信号)を入力して、運転者によるブレーキ操作(ブレーキON)、アクセル操作(アクセルON)、車両走行速度、自車両の異常状態(衝突、被衝突のどちらでも、衝突だけでもよい)が検出される。
運転操作・走行状態検出部6は、自車両の運転操作及び走行の状態を検出する構成部である。例えば、ブレーキ操作信号、アクセル操作信号、車輪速パルス、エアーバッグ動作信号(衝突信号)を入力して、運転者によるブレーキ操作(ブレーキON)、アクセル操作(アクセルON)、車両走行速度、自車両の異常状態(衝突、被衝突のどちらでも、衝突だけでもよい)が検出される。
ハイマウントランプ制御部7は、ハイマウントランプ2Aの液晶・LED駆動回路5Aによる液晶パネル4の標示及びLED4a−1〜4a−6,4b−1,4b−2の点灯を制御する構成部であって、運転操作・走行状態検出部6により検出された自車両の運転操作及び走行の状態に対応した、シンボルの標示及びLEDの点灯状態とする制御信号8を生成して、液晶・LED駆動回路5Aに出力する。
車載運転支援装置9では、ハイマウントランプ抽出処理部11aが、車載カメラ1により撮影された前方画像(先行車両を被写体に含む濃淡画像)を入力する。ここでは、上記実施の形態1〜6と同様に、車載カメラ1が、例えば、30フレーム/秒で撮影を行い、先行車両に搭載されたハイマウントランプ2Aの液晶パネル4は、バーコード様データを構成する各シンボルデータを、車載カメラ1の1フレームの撮影時間よりも短い1/31秒程度の時間ごとに変化させている。
次に、ハイマウントランプ抽出処理部11aは、入力した前方画像を数ライン(平行線)ごとに飛び飛びに1ラインずつ読み取り、濃淡画像をフーリエ変換する。
次いで、ハイマウントランプ抽出処理部11aは、前方画像の1ラインをフーリエ変換した結果に基本波と派生波があるか否かを判定する。1ラインの画像部分をフーリエ変換した結果に基本波と派生波がなかった場合、ハイマウントランプ抽出処理部11aは、前方画像における次のラインに対して、上述の処理を繰り返す。
次いで、ハイマウントランプ抽出処理部11aは、前方画像の1ラインをフーリエ変換した結果に基本波と派生波があるか否かを判定する。1ラインの画像部分をフーリエ変換した結果に基本波と派生波がなかった場合、ハイマウントランプ抽出処理部11aは、前方画像における次のラインに対して、上述の処理を繰り返す。
一方、1ラインの画像部分をフーリエ変換した結果に基本波と派生波がある場合、ハイマウントランプ抽出処理部11aは、当該ラインの画像部分をフーリエ変換して得られた基本波の周波数データを、距離演算部12へ出力する。
距離演算部12は、図15に示した基本波の周波数と車間距離の対応関係に基づいて、基本波の周波数から自車両と先行車両の車間距離を演算する。
上述のようにして車間距離が演算されると、ハイマウントランプ抽出処理部11aは、フーリエ変換した結果に基本波と派生波があったラインの濃淡画像を、シンボル情報検出処理部11bへ出力する。シンボル情報検出処理部11bは、入力したラインの濃淡画像部分からシンボルを読み取る。読み取られたシンボルは、シンボル情報検出処理部11bから走行状態検出部13へ出力される。
距離演算部12は、図15に示した基本波の周波数と車間距離の対応関係に基づいて、基本波の周波数から自車両と先行車両の車間距離を演算する。
上述のようにして車間距離が演算されると、ハイマウントランプ抽出処理部11aは、フーリエ変換した結果に基本波と派生波があったラインの濃淡画像を、シンボル情報検出処理部11bへ出力する。シンボル情報検出処理部11bは、入力したラインの濃淡画像部分からシンボルを読み取る。読み取られたシンボルは、シンボル情報検出処理部11bから走行状態検出部13へ出力される。
走行状態検出部13は、前方画像(濃淡画像)においてシンボル情報検出処理部11bでシーケンスが得られた画像領域のうち、LED4a−1〜4a−6,4b−1,4b−2(LED1〜8)に相当する画像部分があるものを抽出する。続いて、走行状態検出部13は、抽出した画像部分における輝度レベルの差異から、LEDごとに点灯しているか否かを判別する。走行状態検出部13には、LED1〜8の点灯状態によって規定されるディジタルデータと車両情報との対応データが予め設定されており、この対応データを基に、判別したLED1〜8の点灯状態に対応する情報を特定する。
例えば、LED4a−1〜4a−3(LED1〜3)の点灯状態で規定される3ビットのディジタルデータで、所定の速度ごとに複数の段階に区分された自車両の車両走行速度(km/h)を表す。また、LED4a−4〜4a−6(LED4〜6)の点灯状態で規定される3ビットのディジタルデータで、複数の段階に区分された自車両の加減速の状態(自車両の運転操作及び走行の状態)を表す。さらに、LED4b−1,4b−2(LED7,8)の点灯状態で規定される2ビットのディジタルデータで、車間距離検出用のLED間の実距離データを表す。
また、走行状態検出部13は、図6に示したシンボルデータが取り得る数値の対応表に基づいて、シンボル情報検出処理部11bから得たシンボルが“フラグ”であるか否かを判定する。ここで、シンボルが“フラグ”でなければ、上述の処理を繰り返す。
また、シンボルが“フラグ”である場合、シンボル情報検出処理部11bは、車載カメラ1により撮影された次のフレームの前方画像を入力し、当該画像における同一ラインの画像部分から、シンボルを読み取る。
また、シンボルが“フラグ”である場合、シンボル情報検出処理部11bは、車載カメラ1により撮影された次のフレームの前方画像を入力し、当該画像における同一ラインの画像部分から、シンボルを読み取る。
次に、走行状態検出部13は、先行車両のハイマウントランプ2が標示するバーコード様データの同一ラインの画像部分から、全てのシンボルを読み取ったか否かを判定する。例えば、走行状態検出部13が、バーコード様データで最後に標示される“CRC”のシンボルを読み取った場合に、全てのシンボルを読み取ったものと判定する。
未だに読み取っていないシンボルがある場合、車載カメラ1により撮影された次のフレームの前方画像を順次入力して上述の処理を繰り返し、シンボルを順次読み取る。また、全てのシンボルを読み取った場合、処理を終了する。
未だに読み取っていないシンボルがある場合、車載カメラ1により撮影された次のフレームの前方画像を順次入力して上述の処理を繰り返し、シンボルを順次読み取る。また、全てのシンボルを読み取った場合、処理を終了する。
以上のように、この実施の形態7によれば、バーコード様データを標示する液晶パネルと、複数のLEDの点灯状態に応じた情報を提供するランプ部と組み合わせたハイマウントランプを設けたので、上記実施の形態1〜6と比較してさらに的確に先行車両に関する情報を検出することができ、効率的な運転支援が可能である。
なお、本発明はその発明の範囲内において、各実施の形態の自由な組み合わせ、あるいは各実施の形態の任意の構成要素の変形、もしくは各実施の形態において任意の構成要素の省略が可能である。
1 車載カメラ、2,2A ハイマウントランプ、3,3A〜3E 運転支援用情報提供装置、4 液晶パネル、4A 照明器、4a−1〜4a−6,4b−1,4b−2 LED、5 液晶駆動回路、5A 液晶・LED駆動回路、6,6A〜6C 運転操作・走行状態検出部、7,7A〜7D ハイマウントランプ制御部、8 制御信号、9 車載運転支援装置、10 前段処理部、11 画像処理部、11a ハイマウントランプ抽出処理部、11b シンボル情報検出処理部、12 距離演算部、13 走行状態検出部、14 運転支援判断処理部、14a 記憶部、15 音声発生部、16 操作力発生部、17 減速制御部、18 進行方向のGセンサ、19 車間距離センサ、20 車間距離演算部、21 運転状況検出部、22 電池・電源回路、23 車体装着部。
Claims (17)
- バーコード様のシンボルを標示する標示部と、
自車両の運転操作及び走行の状態を検出する運転操作・走行状態検出部と、
前記運転操作・走行状態検出部により検出された前記自車両の運転操作及び走行の状態に対応する前記シンボルのデータ列を所定時間ごとに順次標示するように、前記標示部を制御する制御部とを備えた運転支援用情報提供装置。 - 前記バーコード様のシンボルの少なくとも1つは、当該シンボルの画像を周波数成分に変換した場合に、帯状部の幅に応じた基本周波数成分とこれに派生する特定の周波数成分とを含むことを特徴とする請求項1記載の運転支援用情報提供装置。
- 前記制御部は、所定の速度単位で区分した車両の速度範囲ごとに対応付けた数値データに基づいて、前記運転操作・走行状態検出部により検出された自車両の走行速度の速度範囲に対応する数値を示すシンボルのデータ列を所定時間ごとに順次標示するように、前記標示部を制御することを特徴とする請求項1又は請求項2記載の運転支援用情報提供装置。
- 前記制御部は、アクセル操作及びブレーキ操作の状態ごとに対応付けた数値データに基づいて、前記運転操作・走行状態検出部により検出された自車両のアクセル操作及びブレーキ操作の状態に対応する数値を示すシンボルのデータ列を所定時間ごとに順次標示するように、前記標示部を制御することを特徴とする請求項1から請求項3のうちのいずれか1項記載の運転支援用情報提供装置。
- 前記制御部は、エアーバッグ作動の有無にそれぞれ対応付けた数値データに基づいて、前記運転操作・走行状態検出部により検出された自車両でのエアーバッグ作動の有無に対応する数値を示すシンボルのデータ列を所定時間ごとに順次標示するように、前記標示部を制御することを特徴とする請求項1から請求項4のうちのいずれか1項記載の運転支援用情報提供装置。
- 自車両の進行方向の加速度を検出する加速度センサを備え、
前記運転操作・走行状態検出部は、前記加速度センサにより検出された自車両の進行方向の加速度に基づいて、自車両の進行方向における加減速の状態を検出し、
前記制御部は、複数の段階に区分した車両の進行方向における加減速の状態ごとに対応付けた数値データに基づいて、前記運転操作・走行状態検出部により検出された自車両の進行方向における加減速の状態の段階に対応する数値を示すシンボルのデータ列を所定時間ごとに順次標示するように、前記標示部を制御することを特徴とする請求項1から請求項5のうちのいずれか1項記載の運転支援用情報提供装置。 - 自車両と同じ車線を走行する先行車両を検出する先行車両センサを備え、
前記運転操作・走行状態検出部は、前記先行車両センサで検出された前記先行車両の検出情報に基づいて、自車両と同じ車線を走行する先行車両との車間距離を検出し、
前記制御部は、複数に区分した車間距離範囲ごとに対応付けた数値データに基づいて、前記運転操作・走行状態検出部により検出された前記車間距離の車間距離範囲に対応する数値を示すシンボルのデータ列を所定時間ごとに順次標示するように、前記標示部を制御することを特徴とする請求項1から請求項6のうちのいずれか1項記載の運転支援用情報提供装置。 - バーコード様のシンボルを標示する標示部と、
自車両の進行方向の加速度を検出する加速度センサと、
前記加速度センサにより検出された自車両の進行方向の加速度に基づいて、自車両の進行方向における加減速の状態を検出する検出部と、
複数に区分した車間距離範囲ごとに対応する数値データに基づいて、前記検出部により検出された前記車間距離の車間距離範囲に対応する数値を示す前記シンボルのデータ列を所定時間ごとに順次標示するように、前記標示部を制御する制御部とを備え、
前記標示部、前記加速度センサ、前記検出部及び前記制御部を一つの筐体に設けた運転支援用情報提供装置。 - 前記制御部は、前記標示部に標示されるバーコード様のシンボルの実幅に対応する数値データ、あるいは車両の種類に対応する数値データに基づいて、自車両の前記標示部に標示されるバーコード様のシンボルの実幅に対応する数値を示すシンボル、あるいは自車両の種類に対応する数値を示すシンボルのデータ列を所定時間ごとに順次標示するように、前記標示部を制御することを特徴とする請求項1から請求項8のうちのいずれか1項記載の運転支援用情報提供装置。
- 自車両の前方を撮影する車載カメラと、
前記車載カメラにより撮影された撮影画像から、先行車両に搭載された請求項1から請求項9のうちのいずれか1項記載の運転支援用情報提供装置の標示部の画像を抽出する抽出部と、
前記抽出部により抽出された前記標示部の画像から、当該標示部に標示された前記バーコード様のシンボルを検出するシンボル情報検出処理部と、
前記シンボル情報検出処理部により検出されたシンボルに対応する前記先行車両の運転操作及び走行の状態を検出する状態検出部と、
前記状態検出部により検出された前記先行車両の運転操作及び走行の状態に基づいて、予め設定した運転支援の内容を示す情報のうちから、運転者に提供すべき情報を選別し、当該選別した情報に基づいて自車両の運転支援を行う運転支援判断処理部とを備えた車載運転支援装置。 - 前記抽出部は、前記車載カメラにより撮影された撮影画像をフーリエ変換し、帯状部の幅に応じた基本周波数成分とこれに派生する特定の周波数成分とを含むか否かに応じて、前記撮影画像から前記標示部の画像を抽出することを特徴とする請求項10記載の車載運転支援装置。
- 前記抽出部により抽出された前記標示部の画像のフーリエ変換結果に含まれる基本周波数成分及びこれに派生する特定の周波数成分の値から前方車両までの距離を算出する距離演算部を備えたことを特徴とする請求項11記載の車載運転支援装置。
- 前記車載カメラは、視野角が変更可能であり、
前記距離演算部は、前記車載カメラの視野角に応じて自車両からの距離を区分した距離モードが設定されており、前記抽出部により抽出された前記標示部の画像のフーリエ変換結果に含まれる基本周波数成分及びこれに派生する特定の周波数成分の値と、前記距離モードに応じて設定された換算係数を用いて、前記自車両と前記先行車両の車間距離を算出することを特徴とする請求項12記載の車載運転支援装置。 - 前記車載カメラは、自車両の車両走行速度に応じて視野角が変更され、
前記距離演算部は、前記車載カメラの視野角の変更に応じて前記距離モードを選択することを特徴とする請求項13記載の車載運転支援装置。 - 前記距離演算部は、前記距離モードを所定の周期ごとに切り替えることを特徴とする請求項13記載の車載運転支援装置。
- 前記制御部は、複数に区分した車間距離範囲ごとに対応する数値データに基づいて、請求項12から請求項15のうちのいずれか1項記載の車載運転支援装置の距離演算部により算出された自車両と先行車両との車間距離の車両距離範囲に対応する数値を示す前記シンボルのデータ列を所定時間ごとに順次標示するように、前記標示部を制御することを特徴とする請求項1から請求項6のうちのいずれか1項記載の運転支援用情報提供装置。
- 請求項1から請求項9のうちのいずれか1項記載の運転支援用情報提供装置と、請求項10から請求項15のうちのいずれか1項記載の車載運転支援装置とを備えた運転支援システム。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2011129378A JP2012256235A (ja) | 2011-06-09 | 2011-06-09 | 運転支援用情報提供装置、車載運転支援装置及び運転支援システム |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2011129378A JP2012256235A (ja) | 2011-06-09 | 2011-06-09 | 運転支援用情報提供装置、車載運転支援装置及び運転支援システム |
Publications (1)
| Publication Number | Publication Date |
|---|---|
| JP2012256235A true JP2012256235A (ja) | 2012-12-27 |
Family
ID=47527736
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2011129378A Withdrawn JP2012256235A (ja) | 2011-06-09 | 2011-06-09 | 運転支援用情報提供装置、車載運転支援装置及び運転支援システム |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP2012256235A (ja) |
Cited By (8)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2016037098A (ja) * | 2014-08-06 | 2016-03-22 | オムロンオートモーティブエレクトロニクス株式会社 | 車両用撮像装置 |
| US20180218606A1 (en) * | 2017-02-01 | 2018-08-02 | Toyota Research Institute, Inc. | Systems and methods for operating a vehicle on a roadway |
| JP2019175049A (ja) * | 2018-03-28 | 2019-10-10 | ヤンマー株式会社 | 作業車両の自動走行装置 |
| WO2020148863A1 (ja) * | 2019-01-17 | 2020-07-23 | コネクトフリー株式会社 | 車両と通信を行うための方法、プログラム及びシステム |
| WO2020174812A1 (ja) * | 2019-02-25 | 2020-09-03 | 村田機械株式会社 | 走行車及び走行車システム |
| WO2022249563A1 (ja) * | 2021-05-28 | 2022-12-01 | ソニーグループ株式会社 | 情報処理装置、情報処理方法、及び、プログラム |
| CN116912360A (zh) * | 2023-08-10 | 2023-10-20 | 领悦数字信息技术有限公司 | 多车辆车身显示的控制方法、控制装置、计算机系统和计算机可读存储介质 |
| TWI834818B (zh) | 2019-02-25 | 2024-03-11 | 日商村田機械股份有限公司 | 搬運車系統及搬運車 |
-
2011
- 2011-06-09 JP JP2011129378A patent/JP2012256235A/ja not_active Withdrawn
Cited By (18)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2016037098A (ja) * | 2014-08-06 | 2016-03-22 | オムロンオートモーティブエレクトロニクス株式会社 | 車両用撮像装置 |
| US20180218606A1 (en) * | 2017-02-01 | 2018-08-02 | Toyota Research Institute, Inc. | Systems and methods for operating a vehicle on a roadway |
| US10611378B2 (en) * | 2017-02-01 | 2020-04-07 | Toyota Research Institute, Inc. | Systems and methods for operating a vehicle on a roadway |
| JP2019175049A (ja) * | 2018-03-28 | 2019-10-10 | ヤンマー株式会社 | 作業車両の自動走行装置 |
| JP7210050B2 (ja) | 2019-01-17 | 2023-01-23 | コネクトフリー株式会社 | 方法およびシステム |
| JPWO2020148863A1 (ja) * | 2019-01-17 | 2021-11-25 | コネクトフリー株式会社 | 方法およびシステム |
| WO2020148863A1 (ja) * | 2019-01-17 | 2020-07-23 | コネクトフリー株式会社 | 車両と通信を行うための方法、プログラム及びシステム |
| US11904887B2 (en) | 2019-02-25 | 2024-02-20 | Murata Machinery, Ltd. | Traveling vehicle and traveling vehicle system |
| JPWO2020174812A1 (ja) * | 2019-02-25 | 2021-12-23 | 村田機械株式会社 | 走行車及び走行車システム |
| JP7151863B2 (ja) | 2019-02-25 | 2022-10-12 | 村田機械株式会社 | 走行車及び走行車システム |
| EP3933536A4 (en) * | 2019-02-25 | 2022-11-02 | Murata Machinery, Ltd. | MOVING VEHICLE AND SYSTEM OF A MOVING VEHICLE |
| CN113439248A (zh) * | 2019-02-25 | 2021-09-24 | 村田机械株式会社 | 行驶车及行驶车系统 |
| WO2020174812A1 (ja) * | 2019-02-25 | 2020-09-03 | 村田機械株式会社 | 走行車及び走行車システム |
| TWI834818B (zh) | 2019-02-25 | 2024-03-11 | 日商村田機械股份有限公司 | 搬運車系統及搬運車 |
| CN113439248B (zh) * | 2019-02-25 | 2024-04-19 | 村田机械株式会社 | 行驶车及行驶车系统 |
| WO2022249563A1 (ja) * | 2021-05-28 | 2022-12-01 | ソニーグループ株式会社 | 情報処理装置、情報処理方法、及び、プログラム |
| CN116912360A (zh) * | 2023-08-10 | 2023-10-20 | 领悦数字信息技术有限公司 | 多车辆车身显示的控制方法、控制装置、计算机系统和计算机可读存储介质 |
| CN116912360B (zh) * | 2023-08-10 | 2024-04-26 | 领悦数字信息技术有限公司 | 多车辆车身显示的控制方法、控制装置、计算机系统和计算机可读存储介质 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| US10296796B2 (en) | Video capturing device for predicting special driving situations | |
| KR101539207B1 (ko) | 가시광 통신을 이용한 자동차 안전 장치 | |
| US20160016509A1 (en) | Method for warning a vehicle driver of a tailgating third party vehicle | |
| US20210197824A1 (en) | Advanced driver assistance system, vehicle having the same and method for controlling the vehicle | |
| US10192443B2 (en) | Collision avoidance system and collision avoidance method | |
| US7319932B2 (en) | Speed-monitoring radar-activated brake light | |
| JP2012221303A (ja) | 運転支援用車載点灯装置、車載運転支援装置及び運転支援システム | |
| JP2012256235A (ja) | 運転支援用情報提供装置、車載運転支援装置及び運転支援システム | |
| JP2016095739A (ja) | 標識情報表示システム及び標識情報表示方法 | |
| CN1801243A (zh) | 车辆邻近报警系统和方法 | |
| CN103548069B (zh) | 用于识别可能的碰撞对象的方法和装置 | |
| CN110049899A (zh) | 具有用于生成图像标识的照明模块的机动车 | |
| JP5811543B2 (ja) | 後方車両衝突警報装置 | |
| CN112216111A (zh) | 一种基于微波雷达和视频图像的车速车距预警系统及方法 | |
| US11257372B2 (en) | Reverse-facing anti-collision system | |
| JP4751894B2 (ja) | 自動車の前方にある障害物を検知するシステム | |
| GB2492568A (en) | Vehicle warning system | |
| CN107554422B (zh) | 汽车安全警示装置和汽车安全警示的方法 | |
| KR101813354B1 (ko) | 후방 추돌 사고를 방지하는 장치 및 그 운영 시스템 | |
| CN109823344B (zh) | 驾驶提示方法与系统 | |
| US20220309924A1 (en) | Vehicle control device, vehicle, operation method for vehicle control device, and storage medium | |
| CN114005301A (zh) | 用于控制智慧路灯的方法和控制系统以及智慧路灯 | |
| JP2019204402A (ja) | 障害物表示装置及び車両用灯具システム | |
| KR102004818B1 (ko) | 차량의 추월 위험 경고장치 | |
| US11545032B2 (en) | Roadside apparatus and vehicle-side apparatus for road-to-vehicle communication, and road-to-vehicle communication system |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A300 | Withdrawal of application because of no request for examination |
Free format text: JAPANESE INTERMEDIATE CODE: A300 Effective date: 20140902 |