JP2012251809A - 磁気式回転角検出装置及びブレーキバイワイヤ型制動制御装置 - Google Patents
磁気式回転角検出装置及びブレーキバイワイヤ型制動制御装置 Download PDFInfo
- Publication number
- JP2012251809A JP2012251809A JP2011123105A JP2011123105A JP2012251809A JP 2012251809 A JP2012251809 A JP 2012251809A JP 2011123105 A JP2011123105 A JP 2011123105A JP 2011123105 A JP2011123105 A JP 2011123105A JP 2012251809 A JP2012251809 A JP 2012251809A
- Authority
- JP
- Japan
- Prior art keywords
- magnetic
- rotation angle
- detection device
- value
- abnormality
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Granted
Links
Images


Landscapes
- Engineering & Computer Science (AREA)
- Physics & Mathematics (AREA)
- General Physics & Mathematics (AREA)
- Regulating Braking Force (AREA)
- Mechanical Control Devices (AREA)
- Measurement Of Length, Angles, Or The Like Using Electric Or Magnetic Means (AREA)
- Transmission And Conversion Of Sensor Element Output (AREA)
- Valves And Accessory Devices For Braking Systems (AREA)
- Braking Elements And Transmission Devices (AREA)
- Transportation (AREA)
- Mechanical Engineering (AREA)
- Automation & Control Theory (AREA)
Abstract
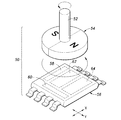
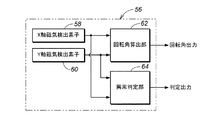
【解決手段】回転軸52の回転に伴って回転変位する磁石54と、磁石54の回転面に平行な面上に互いに直交方向する軸線方向に沿って配置され、90度の回転位相をもって磁石54の磁気強度を検出する2個の磁気検出素子58、・60と、磁気検出素子58、60により検出される磁気強度を合成した合成ベクトルに基づいて回転軸52の回転角を算出する回転角算出部62とを備えた磁気式回転角検出装置において、前記合成ベクトルの値と予め定められた閾値とを比較し、前記合成ベクトルの値が前記閾値を超えれば、異常を判定する異常判定部64を設ける。
【選択図】図1
Description
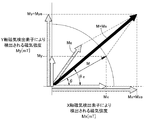
θ=arctan(My/Mx)
θeとθとは等しくなく、θeとθの相違による回転角検出誤差が発生する。
Claims (6)
- 回転軸の回転に伴って回転変位する磁石と、前記磁石の回転面に平行な面上に沿って配置され、それぞれことなる方向への前記磁石の磁気強度を検出する複数の磁気検出素子と、前記複数の磁気検出素子により検出される磁気強度を合成した合成ベクトルに基づいて前記回転軸の回転角を算出する回転角算出部とを備えた磁気式回転角検出装置であって、
前記合成ベクトルの値と予め定められた閾値とを比較し、前記合成ベクトルの値が前記閾値を超えれば、異常を判定する異常判定部を有する磁気式回転角検出装置。 - 前記異常判定部は、前記合成ベクトルの値と予め定められた閾値とを比較し、前記合成ベクトルの値が前記閾値を超え、且つ前記合成ベクトルの絶対値の時間変化量を算出し、当該時間変化量が予め定められた閾値を上回った場合には、異常を判定する請求項1に記載の磁気式回転角検出装置。
- 前記異常判定部は、前記合成ベクトルの値と予め定められた上下限の閾値を比較する請求項1また2に記載の磁気式回転角検出装置。
- 前記異常判定部は、前記合成ベクトルの絶対値と予め定められた閾値とを比較する請求項1または2に記載の磁気式回転角検出装置。
- 回転軸の回転に伴って回転変位する磁石と、前記磁石の回転面に平行な面上に沿って配置され、それぞれ異なる方向への前記磁石の磁気強度を検出する複数の磁気検出素子と、前記複数の磁気検出素子により検出される磁気強度を合成した合成ベクトルに基づいて前記回転軸の回転角を算出する回転角算出部とを備えた磁気式回転角検出装置であって、
前記2個の磁気検出素子により検出される磁気強度の合成ベクトルの絶対値の時間変化量を算出し、当該時間変化量が予め定められた閾値を上回った際を超えれば、異常を判定する異常判定部を有する磁気式回転角検出装置。 - ブレーキペダルの踏込量に相関する回転角を検出する回転角検出装置として、請求項1から5の何れか一項に記載に磁気式回転角検出装置により構成され、前記ブレーキペダルの踏込量に相関する回転角を検出するブレーキペダルセンサと、
前記ブレーキペダルセンサによって検出される回転角に基づき車両の液圧式の制動装置に供給する液圧を発生する電動式液圧発生装置と、
前記ブレーキペダルと機械的に連結されて前記ブレーキペダルの踏み込みに応じて前記制動装置に供給する液圧を発生する機械式液圧発生装置と、
前記異常判定部が異常を判定してない場合には、前記電動式液圧発生装置が発生する液圧のみを前記制動装置に供給し、前記異常判定部が異常を判定した場合には、前記機械式液圧発生装置が発生する液圧のみを前記制動装置に供給する切換部と、
を有するブレーキバイワイヤ型制動制御装置。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2011123105A JP5619677B2 (ja) | 2011-06-01 | 2011-06-01 | 磁気式回転角検出装置及びブレーキバイワイヤ型制動制御装置 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2011123105A JP5619677B2 (ja) | 2011-06-01 | 2011-06-01 | 磁気式回転角検出装置及びブレーキバイワイヤ型制動制御装置 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2012251809A true JP2012251809A (ja) | 2012-12-20 |
| JP5619677B2 JP5619677B2 (ja) | 2014-11-05 |
Family
ID=47524761
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2011123105A Expired - Fee Related JP5619677B2 (ja) | 2011-06-01 | 2011-06-01 | 磁気式回転角検出装置及びブレーキバイワイヤ型制動制御装置 |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP5619677B2 (ja) |
Cited By (8)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US8844380B2 (en) | 2012-11-15 | 2014-09-30 | Denso Corporation | Torque sensor |
| WO2016027838A1 (ja) * | 2014-08-20 | 2016-02-25 | 旭化成エレクトロニクス株式会社 | 故障診断装置、回転角センサ、故障診断方法、およびプログラム |
| EP3006285A1 (en) | 2014-10-08 | 2016-04-13 | Valeo Japan Co., Ltd. | A magnetic type switch |
| JP2018189512A (ja) * | 2017-05-08 | 2018-11-29 | 株式会社東海理化電機製作所 | 磁気式位置検出装置 |
| CN109435935A (zh) * | 2018-12-05 | 2019-03-08 | 曾子珂 | 一种用于检测踏板位移的角度位移传感器装置 |
| US11193794B2 (en) | 2019-06-21 | 2021-12-07 | Asahi Kasei Microdevices Corporation | Rotation angle sensor, angle signal calculation method and non-transitory computer readable medium |
| WO2022181326A1 (ja) * | 2021-02-25 | 2022-09-01 | 株式会社デンソー | ペダル装置 |
| WO2023286476A1 (ja) * | 2021-07-16 | 2023-01-19 | 株式会社デンソー | 位置検出装置およびブレーキペダル装置 |
Citations (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2002296072A (ja) * | 2001-03-13 | 2002-10-09 | Koninkl Philips Electronics Nv | 角度測定装置 |
| JP2006306221A (ja) * | 2005-04-27 | 2006-11-09 | Honda Motor Co Ltd | ブレーキ装置 |
| JP2007139739A (ja) * | 2005-10-20 | 2007-06-07 | Denso Corp | 回転角度検出装置 |
| JP2007298291A (ja) * | 2006-04-27 | 2007-11-15 | Tokai Rika Co Ltd | 回転角度検出装置 |
-
2011
- 2011-06-01 JP JP2011123105A patent/JP5619677B2/ja not_active Expired - Fee Related
Patent Citations (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2002296072A (ja) * | 2001-03-13 | 2002-10-09 | Koninkl Philips Electronics Nv | 角度測定装置 |
| JP2006306221A (ja) * | 2005-04-27 | 2006-11-09 | Honda Motor Co Ltd | ブレーキ装置 |
| JP2007139739A (ja) * | 2005-10-20 | 2007-06-07 | Denso Corp | 回転角度検出装置 |
| JP2007298291A (ja) * | 2006-04-27 | 2007-11-15 | Tokai Rika Co Ltd | 回転角度検出装置 |
Cited By (11)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US8844380B2 (en) | 2012-11-15 | 2014-09-30 | Denso Corporation | Torque sensor |
| WO2016027838A1 (ja) * | 2014-08-20 | 2016-02-25 | 旭化成エレクトロニクス株式会社 | 故障診断装置、回転角センサ、故障診断方法、およびプログラム |
| EP3006285A1 (en) | 2014-10-08 | 2016-04-13 | Valeo Japan Co., Ltd. | A magnetic type switch |
| JP2018189512A (ja) * | 2017-05-08 | 2018-11-29 | 株式会社東海理化電機製作所 | 磁気式位置検出装置 |
| CN109435935A (zh) * | 2018-12-05 | 2019-03-08 | 曾子珂 | 一种用于检测踏板位移的角度位移传感器装置 |
| CN109435935B (zh) * | 2018-12-05 | 2024-03-26 | 曾子珂 | 一种用于检测踏板位移的角度位移传感器装置 |
| US11193794B2 (en) | 2019-06-21 | 2021-12-07 | Asahi Kasei Microdevices Corporation | Rotation angle sensor, angle signal calculation method and non-transitory computer readable medium |
| WO2022181326A1 (ja) * | 2021-02-25 | 2022-09-01 | 株式会社デンソー | ペダル装置 |
| JP7452467B2 (ja) | 2021-02-25 | 2024-03-19 | 株式会社デンソー | ペダル装置 |
| WO2023286476A1 (ja) * | 2021-07-16 | 2023-01-19 | 株式会社デンソー | 位置検出装置およびブレーキペダル装置 |
| JP7459847B2 (ja) | 2021-07-16 | 2024-04-02 | 株式会社デンソー | 位置検出装置およびブレーキペダル装置 |
Also Published As
| Publication number | Publication date |
|---|---|
| JP5619677B2 (ja) | 2014-11-05 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP5619677B2 (ja) | 磁気式回転角検出装置及びブレーキバイワイヤ型制動制御装置 | |
| JP5498541B2 (ja) | 車両用制動力発生装置 | |
| US10696281B2 (en) | Electric brake system and operating method thereof | |
| JP5953635B2 (ja) | 液圧発生装置 | |
| JP6081349B2 (ja) | 車両の旋回制御システム | |
| US20170101150A1 (en) | Saddle riding type vehicle | |
| JP6046699B2 (ja) | 制動装置 | |
| CN109572659B (zh) | 电制动系统及其控制方法 | |
| CN101372225A (zh) | 主动制动器脉动控制 | |
| JP5916141B2 (ja) | 車両用制動装置 | |
| JP2018052142A (ja) | 車両の制動制御装置 | |
| KR101601462B1 (ko) | 차량의 전기유압식 브레이크 시스템 | |
| JP2017043300A (ja) | 異常検出装置 | |
| JP5856133B2 (ja) | 車両用制動システム | |
| US20160053907A1 (en) | Pressure regulator and hydraulic brake system for vehicle equipped with the same | |
| JP6487726B2 (ja) | 車両用制動システム | |
| US20180257614A1 (en) | Pedal displacement sensor and electronic brake system comprising the same | |
| Ho et al. | Fault-tolerant control of an electrohydraulic brake using virtual pressure sensor | |
| WO2018066610A1 (ja) | 車両用制動装置 | |
| US20160053900A1 (en) | Pressure regulator and hydraulic brake system for vehicle equipped with the same | |
| JP6666582B2 (ja) | 車両の制動制御装置 | |
| JP2013216268A (ja) | 液圧制動装置の異常検出装置 | |
| JP6139472B2 (ja) | 車両用ブレーキ装置、および、車両用ブレーキ装置に備わる電動機の電気角検出方法 | |
| JP2013147183A (ja) | 液圧制動装置の異常検出装置 | |
| JP6686363B2 (ja) | 車両の制動制御装置 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20131128 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20140409 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20140520 |
|
| A521 | Written amendment |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20140715 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20140909 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20140917 |
|
| R150 | Certificate of patent or registration of utility model |
Ref document number: 5619677 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| LAPS | Cancellation because of no payment of annual fees |