JP7452467B2 - ペダル装置 - Google Patents
ペダル装置 Download PDFInfo
- Publication number
- JP7452467B2 JP7452467B2 JP2021029092A JP2021029092A JP7452467B2 JP 7452467 B2 JP7452467 B2 JP 7452467B2 JP 2021029092 A JP2021029092 A JP 2021029092A JP 2021029092 A JP2021029092 A JP 2021029092A JP 7452467 B2 JP7452467 B2 JP 7452467B2
- Authority
- JP
- Japan
- Prior art keywords
- pedal
- shaft
- housing
- signal output
- pedal pad
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Active
Links
- 239000000463 material Substances 0.000 claims description 2
- 230000000694 effects Effects 0.000 description 13
- 230000004907 flux Effects 0.000 description 12
- 238000001514 detection method Methods 0.000 description 10
- 239000012530 fluid Substances 0.000 description 7
- 239000002184 metal Substances 0.000 description 7
- 238000000034 method Methods 0.000 description 6
- 230000000994 depressogenic effect Effects 0.000 description 3
- 238000010586 diagram Methods 0.000 description 3
- 230000001965 increasing effect Effects 0.000 description 3
- 238000003780 insertion Methods 0.000 description 3
- 230000037431 insertion Effects 0.000 description 3
- 238000000465 moulding Methods 0.000 description 3
- 239000011347 resin Substances 0.000 description 3
- 229920005989 resin Polymers 0.000 description 3
- 239000000470 constituent Substances 0.000 description 2
- 230000007423 decrease Effects 0.000 description 2
- 230000002093 peripheral effect Effects 0.000 description 2
- 230000001133 acceleration Effects 0.000 description 1
- 230000001939 inductive effect Effects 0.000 description 1
- 230000007257 malfunction Effects 0.000 description 1
- 238000005192 partition Methods 0.000 description 1
- 230000008929 regeneration Effects 0.000 description 1
- 238000011069 regeneration method Methods 0.000 description 1
- 210000002784 stomach Anatomy 0.000 description 1
Images


























Classifications
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60T—VEHICLE BRAKE CONTROL SYSTEMS OR PARTS THEREOF; BRAKE CONTROL SYSTEMS OR PARTS THEREOF, IN GENERAL; ARRANGEMENT OF BRAKING ELEMENTS ON VEHICLES IN GENERAL; PORTABLE DEVICES FOR PREVENTING UNWANTED MOVEMENT OF VEHICLES; VEHICLE MODIFICATIONS TO FACILITATE COOLING OF BRAKES
- B60T7/00—Brake-action initiating means
- B60T7/02—Brake-action initiating means for personal initiation
- B60T7/04—Brake-action initiating means for personal initiation foot actuated
- B60T7/042—Brake-action initiating means for personal initiation foot actuated by electrical means, e.g. using travel or force sensors
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60T—VEHICLE BRAKE CONTROL SYSTEMS OR PARTS THEREOF; BRAKE CONTROL SYSTEMS OR PARTS THEREOF, IN GENERAL; ARRANGEMENT OF BRAKING ELEMENTS ON VEHICLES IN GENERAL; PORTABLE DEVICES FOR PREVENTING UNWANTED MOVEMENT OF VEHICLES; VEHICLE MODIFICATIONS TO FACILITATE COOLING OF BRAKES
- B60T7/00—Brake-action initiating means
- B60T7/02—Brake-action initiating means for personal initiation
- B60T7/04—Brake-action initiating means for personal initiation foot actuated
- B60T7/06—Disposition of pedal
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60T—VEHICLE BRAKE CONTROL SYSTEMS OR PARTS THEREOF; BRAKE CONTROL SYSTEMS OR PARTS THEREOF, IN GENERAL; ARRANGEMENT OF BRAKING ELEMENTS ON VEHICLES IN GENERAL; PORTABLE DEVICES FOR PREVENTING UNWANTED MOVEMENT OF VEHICLES; VEHICLE MODIFICATIONS TO FACILITATE COOLING OF BRAKES
- B60T7/00—Brake-action initiating means
- B60T7/02—Brake-action initiating means for personal initiation
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60T—VEHICLE BRAKE CONTROL SYSTEMS OR PARTS THEREOF; BRAKE CONTROL SYSTEMS OR PARTS THEREOF, IN GENERAL; ARRANGEMENT OF BRAKING ELEMENTS ON VEHICLES IN GENERAL; PORTABLE DEVICES FOR PREVENTING UNWANTED MOVEMENT OF VEHICLES; VEHICLE MODIFICATIONS TO FACILITATE COOLING OF BRAKES
- B60T8/00—Arrangements for adjusting wheel-braking force to meet varying vehicular or ground-surface conditions, e.g. limiting or varying distribution of braking force
- B60T8/17—Using electrical or electronic regulation means to control braking
-
- G—PHYSICS
- G05—CONTROLLING; REGULATING
- G05G—CONTROL DEVICES OR SYSTEMS INSOFAR AS CHARACTERISED BY MECHANICAL FEATURES ONLY
- G05G1/00—Controlling members, e.g. knobs or handles; Assemblies or arrangements thereof; Indicating position of controlling members
- G05G1/30—Controlling members actuated by foot
- G05G1/38—Controlling members actuated by foot comprising means to continuously detect pedal position
-
- G—PHYSICS
- G05—CONTROLLING; REGULATING
- G05G—CONTROL DEVICES OR SYSTEMS INSOFAR AS CHARACTERISED BY MECHANICAL FEATURES ONLY
- G05G1/00—Controlling members, e.g. knobs or handles; Assemblies or arrangements thereof; Indicating position of controlling members
- G05G1/30—Controlling members actuated by foot
- G05G1/44—Controlling members actuated by foot pivoting
-
- G—PHYSICS
- G05—CONTROLLING; REGULATING
- G05G—CONTROL DEVICES OR SYSTEMS INSOFAR AS CHARACTERISED BY MECHANICAL FEATURES ONLY
- G05G1/00—Controlling members, e.g. knobs or handles; Assemblies or arrangements thereof; Indicating position of controlling members
- G05G1/30—Controlling members actuated by foot
- G05G1/50—Manufacturing of pedals; Pedals characterised by the material used
-
- G—PHYSICS
- G05—CONTROLLING; REGULATING
- G05G—CONTROL DEVICES OR SYSTEMS INSOFAR AS CHARACTERISED BY MECHANICAL FEATURES ONLY
- G05G5/00—Means for preventing, limiting or returning the movements of parts of a control mechanism, e.g. locking controlling member
- G05G5/04—Stops for limiting movement of members, e.g. adjustable stop
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60T—VEHICLE BRAKE CONTROL SYSTEMS OR PARTS THEREOF; BRAKE CONTROL SYSTEMS OR PARTS THEREOF, IN GENERAL; ARRANGEMENT OF BRAKING ELEMENTS ON VEHICLES IN GENERAL; PORTABLE DEVICES FOR PREVENTING UNWANTED MOVEMENT OF VEHICLES; VEHICLE MODIFICATIONS TO FACILITATE COOLING OF BRAKES
- B60T2220/00—Monitoring, detecting driver behaviour; Signalling thereof; Counteracting thereof
- B60T2220/04—Pedal travel sensor, stroke sensor; Sensing brake request
Landscapes
- Engineering & Computer Science (AREA)
- Transportation (AREA)
- Mechanical Engineering (AREA)
- Physics & Mathematics (AREA)
- General Physics & Mathematics (AREA)
- Automation & Control Theory (AREA)
- Manufacturing & Machinery (AREA)
- Mechanical Control Devices (AREA)
- Braking Elements And Transmission Devices (AREA)
- Regulating Braking Force (AREA)
- Auxiliary Drives, Propulsion Controls, And Safety Devices (AREA)
Description
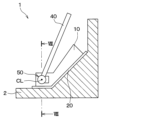
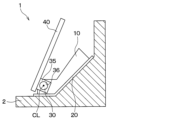
第1実施形態について図面を参照しつつ説明する。図1~図3に示すように、本実施形態のペダル装置1は、車両に搭載され、運転者の踏力により踏み込み操作されるオルガン式のペダル装置1である。オルガン式のペダル装置1とは、ペダルパッド40のうち運転者に踏まれる部位が回転中心(以下、「回転軸CL」という)に対して車両搭載時の天地方向における上方に配置される構成のものをいう。オルガン式のペダル装置1は、ペダルパッド40に印加される運転者の踏力の増加に応じてペダルパッド40のうち回転軸CLより車両前方の部位が車室内のフロア2側またはダッシュパネル側に回転動作する。このようなオルガン式のペダル装置1は、アクセルペダル装置またはブレーキペダル装置などとして用いられる。本実施形態では、ペダル装置1の一例として、ブレーキペダル装置について説明する。
図6に示すように、ブレーキバイワイヤシステム100とは、ペダル装置1のセンサユニット50から出力される電気信号に基づき、車両に搭載される電子制御装置(以下、ECU110という)の駆動制御によりブレーキ回路120が車両の制動に必要な油圧を発生させてホイールシリンダ131~134を駆動するシステムである。
図1~図5に示すように、ペダル装置1は、ハウジング10、ベースプレート20、シャフト30、ペダルパッド40およびセンサユニット50などを備えている。
(1)第1実施形態では、オルガン式のペダル装置1において、ペダルパッド40とシャフト30とが同一の回転軸CL周りに回転動作する構成である。そして、センサユニット50は、シャフト30に設けられる回動部51、およびハウジング10に設けられる信号出力部55を有している。
これにより、ペダル回転角をセンサユニット50により直接検出することが可能である。すなわち、センサユニット50は、車両走行を制御するために運転者が踏み込み操作した実際のペダルパッド40の操作量(すなわち、ペダル回転角)に応じた精度の高い電気信号を出力する。したがって、このペダル装置1は、ペダル操作量の検出精度を高め、より正確な車両走行制御を実現することができる。
これによれば、ハウジング10と車体との間にベースプレート20を設けることで、ハウジング10の剛性が高くなる。そのため、ハウジング10のうちシャフト30を回転可能に支持するシャフト受部13の変形が防がれる。したがって、このペダル装置1は、センサユニット50が有する回動部51と信号出力部55との位置ずれを防ぎ、ペダル回転角の検出精度を高めることができる。
これによれば、回動部51と信号出力部55との接触がないため、両部材の摩耗や破損がなく、センサユニット50からの出力信号の信頼性を向上することができる。
これによれば、センサユニット50の回動部51と信号出力部55の具体的構成が例示される。
これによれば、センサユニット50によるペダル回転角の検出精度を向上することができる。
これによれば、センサユニット50の信号出力部55をハウジング10に組み付ける際に信号出力部55のセンサ中心が所定の位置(本実施形態では、シャフト30の回転軸CL)から位置ずれすることを防ぎ、センサユニット50によるペダル回転角の検出精度を向上することができる。
これによれば、位置決め構造の凸部58と凹部17の具体的構成が例示される。
これによれば、ペダルパッド40およびシャフト30の回転軸CLの周りの空間にセンサユニット50を設けることが可能である。そして、運転者からペダルを見たとき、ペダルパッド40の裏側から離れた位置にセンサユニット50を配置することで、運転者の足が意図せずセンサユニット50に接触してセンサユニット50が故障するといった不具合を防ぐことが可能である。したがって、ペダルパッド40の回転角度をセンサユニット50で直接検出する構成において、センサユニット50の強度安全性を確保することができる。
これによれば、シャフト30が軸部31、固定部32および連結部33を有する構成とすることで、ペダルパッド40の回転軸CL(すなわち、軸部31の中心)とペダルパッド40とを離れた位置に配置し、その回転軸CLの周りの空間にセンサユニット50を設けることが可能である。そして、そのセンサユニット50により、ペダル回転角を直接検出することができる。
これによれば、仮に、ハウジング本体11とハウジングカバー12とでシャフト30を支持する構成とした場合、ハウジング本体11とハウジングカバー12との組み付けのばらつきなどで、シャフト30の回転軸CLの傾きが生じることがある。それに対し、本実施形態では、ハウジング本体11のみでシャフト30を支持し、ハウジングカバー12はシャフト30を支持しない構成とすることで、ハウジング本体11に対するシャフト30の回転軸CLの傾きが防がれる。さらに、信号出力部55の位置決め構造もハウジング本体11に設けることで、信号出力部55とシャフト30の回転軸CLとの位置ずれが防がれるので、ペダル回転角の検出精度を高めることができる。
これによれば、軸受14を使用することで、ハウジング10およびシャフト30の摩耗を低減することが可能である。そのため、センサユニット50の信号出力部55を固定するハウジング10に対してペダルパッド40およびシャフト30の回転軸CLの傾きが防がれるので、センサユニット50によるペダル回転角の検出精度を高めることができる。
これによれば、ペダルパッド40の最小回転角と最大回転角とを規定することで、センサユニット50から出力されるペダル回転角度に対する出力信号の特性のばらつきを低減し、センサユニット50の出力信号の信頼性を向上することができる。
また、ペダルパッド40が設計値以上に回転しないよう規制することで、ペダルパッド40が意図しない範囲に回転動作することを防ぎ、ペダル装置1の強度安全性を確保することができる。
これによれば、第1実施形態のペダル装置1をブレーキバイワイヤシステム100に使用することで、ペダル装置1のセンサユニット50から出力される検出精度の高い電気信号に基づき、ECU110は、より正確な車両走行制御を実現することができる。
第2実施形態について説明する。第2実施形態は、第1実施形態に対してシャフト30などの構成の一部を変更したものであり、その他については第1実施形態と同様であるため、第1実施形態と異なる部分についてのみ説明する。
第3実施形態について説明する。第3実施形態は、第1実施形態等に対してセンサユニット50の構成の一部を変更したものであり、その他については第1実施形態等と同様であるため、第1実施形態等と異なる部分についてのみ説明する。
第4実施形態について説明する。第4実施形態も、第1実施形態等に対してセンサユニット50の構成の一部を変更したものであり、その他については第1実施形態等と同様であるため、第1実施形態等と異なる部分についてのみ説明する。
第5実施形態について説明する。第5実施形態も、第1実施形態等に対してセンサユニット50の構成の一部を変更したものであり、その他については第1実施形態等と同様であるため、第1実施形態等と異なる部分についてのみ説明する。
第6実施形態について説明する。第6実施形態も、第1実施形態等に対してセンサユニット50の構成の一部を変更したものであり、その他については第1実施形態等と同様であるため、第1実施形態等と異なる部分についてのみ説明する。
第7実施形態について説明する。第7実施形態も、第1実施形態等に対してセンサユニット50の構成の一部を変更したものであり、その他については第1実施形態等と同様であるため、第1実施形態等と異なる部分についてのみ説明する。
第8実施形態について説明する。第8実施形態は、第1実施形態等に対してセンサユニット50とハウジング10との固定方法の例を説明するものである。
第9実施形態について説明する。第9実施形態も、第1実施形態等に対してセンサユニット50とハウジング10との固定方法の例を説明するものである。
第10実施形態について説明する。第10実施形態も、第1実施形態等に対してセンサユニット50とハウジング10との固定方法の例を説明するものである。
第11実施形態について説明する。第11実施形態は、第1実施形態等に対してシャフト30とペダルパッド40との固定方法を変更したものであり、その他については第1実施形態等と同様であるため、第1実施形態等と異なる部分についてのみ説明する。
また、第11実施形態では、ペダルパッド40とシャフト30とが連結部材35により固定され、シャフト30の中心がペダルパッド40の回転軸CLとなる構成である。そのシャフト30は、ハウジング10のシャフト受部13に回転可能に支持される。そのため、ペダルパッド40およびシャフト30の回転軸CL周りの強度および耐久性を向上することができる。
さらに、第11実施形態では、シャフト30の構成を簡素にすると共に、シャフト30とペダルパッド40とを簡素な構成で固定することができる。
第12実施形態について説明する。第12実施形態は、第1実施形態等に対してシャフト30の構成の例を説明するものである。
以上説明した第12実施形態も、第1実施形態と同様の構成から、第1実施形態と同様の作用効果を奏することができる。
第13実施形態について説明する。第13実施形態も、第1実施形態等に対してシャフト30の構成の例を説明するものである。
第14実施形態について説明する。第14実施形態も、第1実施形態等に対してシャフト30の構成の例を説明するものである。
第15実施形態について説明する。第15実施形態は、第1実施形態等に対してベースプレート20を廃止したものであり、その他については第1実施形態等と同様であるため、第1実施形態等と異なる部分についてのみ説明する。
以上説明した第15実施形態も、第1実施形態と同様の構成から、第1実施形態と同様の作用効果を奏することができる。また、第15実施形態では、ペダル装置1の部品点数を少なくすることが可能である。
(1)上記各実施形態では、ペダル装置1の一例としてブレーキペダル装置について説明したが、これに限らず、ペダル装置1はアクセルペダル装置とすることもできる。または、ペダル装置1は、運転者が足で操作する種々の装置とすることもできる。
10 ハウジング
30 シャフト
40 ペダルパッド
50 センサユニット
51 回動部
55 信号出力部
CL 回転軸
Claims (14)
- 運転者によるペダル操作量に応じた電気信号を車両の電子制御装置に送信するオルガン式のペダル装置において、
車体に取り付けられるハウジング(10)と、
前記ハウジングに設けられたシャフト受部(13)の中心を回転軸(CL)として回転可能に支持されるシャフト(30)と、
前記シャフトに固定されて前記シャフトと同一の前記回転軸周りに回転動作するペダルパッド(40)であって、前記ペダルパッドのうち前記運転者に踏まれる部位(41)が前記回転軸に対して車両搭載時の天地方向における上方に配置される前記ペダルパッドと、
前記シャフトに設けられる回動部(51)、および前記ハウジングに設けられて前記回動部の位相に応じた信号を出力する信号出力部(55)を有し、前記ペダルパッドおよび前記シャフトの回転角度を検出するセンサユニット(50)と、を備え、
前記シャフトと前記ペダルパッドとは、同一の前記回転軸を中心として回転する構成となっているペダル装置。 - 前記ハウジングのうち前記ペダルパッドとは反対側の面に設けられ、前記車体に固定されるベースプレート(20)をさらに備え、
前記ベースプレートは、前記ハウジングに比べて強度の高い材料により構成されている請求項1に記載のペダル装置。 - 前記センサユニットは、前記回動部と前記信号出力部とが非接触で前記ペダルパッドおよび前記シャフトの回転角度を検出可能な非接触式のセンサである、請求項1または2に記載のペダル装置。
- 前記回動部は、磁界を形成する磁気回路(52)を含んで構成され、
前記信号出力部は、前記ペダルパッドおよび前記シャフトの回転に伴って変化する磁界に応じた電気信号を出力するホールIC(56)を含んで構成されるものである、請求項1ないし3のいずれか1つに記載のペダル装置。 - 前記回動部の回転中心と前記信号出力部のセンサ中心はいずれも、前記回転軸上に配置されている、請求項1ないし4のいずれか1つに記載のペダル装置。
- 前記信号出力部と前記ハウジングは、前記信号出力部のセンサ中心を、前記回動部の位相を検出可能な所定の位置に組み付け可能な位置決め構造を有しており、
前記位置決め構造は、
前記信号出力部または前記ハウジングの一方に設けられる凸部(58)と、
前記信号出力部または前記ハウジングの他方に設けられ、前記凸部と嵌合する凹部(17)とにより構成されている、請求項1ないし5のいずれか1つに記載のペダル装置。 - 前記凹部は、前記ハウジングに設けられた開口部(18)の内壁面であり、
前記凸部は、前記信号出力部が有するセンサ保持部(57)の外壁面である、請求項6に記載のペダル装置。 - 前記信号出力部の少なくとも一部が前記ハウジングに埋め込まれた状態で、前記信号出力部と前記ハウジングとは一体に固定されている、請求項1ないし5のいずれか1つに記載のペダル装置。
- 前記ペダルパッドに前記運転者の踏力が印加されていない状態で、前記ペダルパッドのうち前記回転軸と同一の高さの部位およびそれより下側の部位に対して車両前方に離れた場所に前記回転軸が位置している、請求項1ないし8のいずれか1つに記載のペダル装置。
- 前記シャフトは、
前記シャフト受部に回転可能に支持され、前記回転軸と平行に延びる軸部(31)と、
前記ペダルパッドに回転不能に固定される固定部(32)と、
前記軸部と前記固定部とを連結する連結部(33)とを有している、請求項1ないし9のいずれか1つに記載のペダル装置。 - 前記ハウジングは、
前記シャフト受部を有し、且つ、前記信号出力部のセンサ中心を前記回動部の位相を検出可能な所定の位置に組み付け可能な位置決め構造を有するハウジング本体(11)と、
前記シャフトを支持することなく、且つ、前記信号出力部の位置決め構造を有することなく、前記ハウジング本体の内側に形成される空間の側面開口部を塞ぐハウジングカバー(12)と、を有している、請求項1ないし10のいずれか1つに記載のペダル装置。 - 前記ハウジング本体と前記シャフトとの間に配置される軸受(14)をさらに備える、請求項11に記載のペダル装置。
- 前記ハウジングのうち前記回転軸より車両前方側の部位に設けられ、前記ペダルパッドに印加される前記運転者の踏力が増加したときに前記ペダルパッドに直接接触し、前記ペダルパッドの最大回転位置を規定する全開ストッパ(71)と、
前記ハウジングのうち前記回転軸より車両後方側の部位に設けられ、前記ペダルパッドに前記運転者の踏力が印加されないときに前記ペダルパッドに直接接触し、前記ペダルパッドの最小回転位置を規定する全閉ストッパ(70)と、をさらに備える、請求項1ないし12のいずれか1つに記載のペダル装置。 - 前記ペダル装置は、前記センサユニットの出力信号に基づく電子制御装置(110)の駆動制御によりブレーキ回路(120)が車両の制動に必要な油圧を発生させるブレーキバイワイヤシステム(100)に使用されるブレーキペダルである、請求項1ないし13のいずれか1つに記載のペダル装置。
Priority Applications (6)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2021029092A JP7452467B2 (ja) | 2021-02-25 | 2021-02-25 | ペダル装置 |
| CN202280016620.7A CN116917830A (zh) | 2021-02-25 | 2022-02-09 | 踏板装置 |
| DE112022001183.1T DE112022001183T5 (de) | 2021-02-25 | 2022-02-09 | Pedalvorrichtung |
| PCT/JP2022/005052 WO2022181326A1 (ja) | 2021-02-25 | 2022-02-09 | ペダル装置 |
| US18/454,564 US20230406270A1 (en) | 2021-02-25 | 2023-08-23 | Pedal device |
| JP2024027613A JP2024055930A (ja) | 2021-02-25 | 2024-02-27 | ペダル装置 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2021029092A JP7452467B2 (ja) | 2021-02-25 | 2021-02-25 | ペダル装置 |
Related Child Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2024027613A Division JP2024055930A (ja) | 2021-02-25 | 2024-02-27 | ペダル装置 |
Publications (3)
| Publication Number | Publication Date |
|---|---|
| JP2022130111A JP2022130111A (ja) | 2022-09-06 |
| JP2022130111A5 JP2022130111A5 (ja) | 2023-03-28 |
| JP7452467B2 true JP7452467B2 (ja) | 2024-03-19 |
Family
ID=83048254
Family Applications (2)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2021029092A Active JP7452467B2 (ja) | 2021-02-25 | 2021-02-25 | ペダル装置 |
| JP2024027613A Pending JP2024055930A (ja) | 2021-02-25 | 2024-02-27 | ペダル装置 |
Family Applications After (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2024027613A Pending JP2024055930A (ja) | 2021-02-25 | 2024-02-27 | ペダル装置 |
Country Status (5)
| Country | Link |
|---|---|
| US (1) | US20230406270A1 (ja) |
| JP (2) | JP7452467B2 (ja) |
| CN (1) | CN116917830A (ja) |
| DE (1) | DE112022001183T5 (ja) |
| WO (1) | WO2022181326A1 (ja) |
Citations (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2012251809A (ja) | 2011-06-01 | 2012-12-20 | Honda Motor Co Ltd | 磁気式回転角検出装置及びブレーキバイワイヤ型制動制御装置 |
| JP2015081023A (ja) | 2013-10-23 | 2015-04-27 | 株式会社デンソー | アクセル装置 |
| WO2020129359A1 (ja) | 2018-12-20 | 2020-06-25 | 株式会社デンソー | アクセル装置 |
Family Cites Families (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP6581678B2 (ja) | 2017-03-06 | 2019-09-25 | タイコ エレクトロニクス アンプ コリア カンパニー リミテッドTyco Electronics AMP Korea Co.,Ltd | ペダル装置及びその製造方法 |
| JP7226182B2 (ja) | 2019-08-13 | 2023-02-21 | 株式会社明電舎 | 電力変換装置の制御装置および電力変換装置の制御方法 |
-
2021
- 2021-02-25 JP JP2021029092A patent/JP7452467B2/ja active Active
-
2022
- 2022-02-09 DE DE112022001183.1T patent/DE112022001183T5/de active Pending
- 2022-02-09 CN CN202280016620.7A patent/CN116917830A/zh active Pending
- 2022-02-09 WO PCT/JP2022/005052 patent/WO2022181326A1/ja active Application Filing
-
2023
- 2023-08-23 US US18/454,564 patent/US20230406270A1/en active Pending
-
2024
- 2024-02-27 JP JP2024027613A patent/JP2024055930A/ja active Pending
Patent Citations (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2012251809A (ja) | 2011-06-01 | 2012-12-20 | Honda Motor Co Ltd | 磁気式回転角検出装置及びブレーキバイワイヤ型制動制御装置 |
| JP2015081023A (ja) | 2013-10-23 | 2015-04-27 | 株式会社デンソー | アクセル装置 |
| WO2020129359A1 (ja) | 2018-12-20 | 2020-06-25 | 株式会社デンソー | アクセル装置 |
Also Published As
| Publication number | Publication date |
|---|---|
| DE112022001183T5 (de) | 2023-12-07 |
| US20230406270A1 (en) | 2023-12-21 |
| JP2022130111A (ja) | 2022-09-06 |
| WO2022181326A1 (ja) | 2022-09-01 |
| JP2024055930A (ja) | 2024-04-19 |
| CN116917830A (zh) | 2023-10-20 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| US20240116483A1 (en) | Brake system | |
| JP7452467B2 (ja) | ペダル装置 | |
| JP7444105B2 (ja) | ペダル装置 | |
| US20230393605A1 (en) | Pedal device | |
| JP7529122B2 (ja) | ペダル装置およびペダル装置の製造方法 | |
| JP7459847B2 (ja) | 位置検出装置およびブレーキペダル装置 | |
| JP7380648B2 (ja) | ペダル装置 | |
| KR20210093018A (ko) | 차량의 핸들 타입 통합 제어장치 | |
| JP7380649B2 (ja) | ペダル装置 | |
| WO2024053492A1 (ja) | ペダル装置 | |
| JP7517603B2 (ja) | ペダル装置 | |
| WO2023145538A1 (ja) | ブレーキペダル装置 | |
| CN117296017A (zh) | 车辆用踏板模块 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20230317 |
|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20230418 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20240206 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20240219 |
|
| R151 | Written notification of patent or utility model registration |
Ref document number: 7452467 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R151 |