JP2012203085A - 振動アクチュエータ、レンズ鏡筒及び電子機器 - Google Patents
振動アクチュエータ、レンズ鏡筒及び電子機器 Download PDFInfo
- Publication number
- JP2012203085A JP2012203085A JP2011065850A JP2011065850A JP2012203085A JP 2012203085 A JP2012203085 A JP 2012203085A JP 2011065850 A JP2011065850 A JP 2011065850A JP 2011065850 A JP2011065850 A JP 2011065850A JP 2012203085 A JP2012203085 A JP 2012203085A
- Authority
- JP
- Japan
- Prior art keywords
- vibrator
- resin film
- contact surface
- ultrasonic motor
- vibration actuator
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Pending
Links
Images

Landscapes
- Lens Barrels (AREA)
- General Electrical Machinery Utilizing Piezoelectricity, Electrostriction Or Magnetostriction (AREA)
Abstract
【解決手段】振動を発生する振動子と、振動子と加圧接触され、振動によって振動子に対して相対移動する相対移動部材とを備え、振動子の相対移動部材に対する第一接触面、及び、相対移動部材の振動子に対する第二接触面、の一方は、弾性率が5GPa以下となるようにフッ素樹脂を含む樹脂膜で形成されており、第一接触面及び第二接触面の他方は、クルトシスが3.5〜6.5となるようにクロム化合物で形成されている。
【選択図】図1
Description
[第一実施形態]
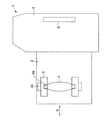
図1は、本発明の第一実施形態に係るカメラ1の構成を示す図である。
本実施形態では、振動アクチュエータとして、超音波の振動域を利用する超音波モータを一例に挙げて説明する。また、本実施形態では、電子機器として、カメラを一例に挙げて説明する。
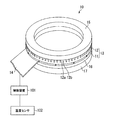
本実施形態の超音波モータ10は、圧電体11及び弾性体12を備える振動子13と、移動体15と、フレキシブルプリント基板14と、振動吸収材16と、支持体17等とを備えている。
(2)樹脂膜18の剥離強度や振動子13(弾性体12)に対する密着性が向上し、樹脂膜18の耐久性が向上する。
(3)樹脂膜18の耐熱性が向上し、超音波モータ10の駆動時に発生する摩擦熱によって、樹脂膜18が変質することを防止できる。
(4)樹脂膜18の耐水性が向上し、空気中の水分によって樹脂膜18が化学的に変質することを防止できる。
まず、弾性体12の移動体15との接触面(櫛歯部12aの先端面)の脱脂処理を行う。このとき、更なる密着性向上のためにブラスト・エッチング等面を荒らす処理を行なってもよい。

まず、ポリアミドイミド樹脂を主成分とする樹脂膜を有する測定例の超音波モータの保持トルク、最大トルク、最低起動電圧、消費電力は、測定例13(エポキシ樹脂を主成分)の超音波モータに比べて良好である。
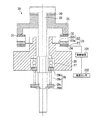
図4は、本発明の第二実施形態に係る超音波モータ20を示す断面図である。
本発明の第二実施形態に係る超音波モータ20は、上記第一実施形態の超音波モータ10と同様のカメラ1のレンズ鏡筒3に設けられ、フォーカス動作を行なう際のレンズ4を駆動する駆動源として用いられている。この超音波モータ20は、不図示のギアを介して駆動力を不図示のカム筒に伝え、このカム筒に保持されるレンズ4を駆動する形態となっている点が第一実施形態とは異なる。
上記各実施形態では、顔料としてコバルトニッケルを使用する例を示したが、これに限らず、カーボンブラック等の顔料でもよい。
Claims (7)
- 振動を発生する振動子と、
前記振動子と加圧接触され、前記振動によって前記振動子に対して相対移動する相対移動部材と
を備え、
前記振動子の前記相対移動部材に対する第一接触面、及び、前記相対移動部材の前記振動子に対する第二接触面、の一方は、弾性率が5GPa以下となるようにフッ素樹脂を含む樹脂膜で形成されており、
前記第一接触面及び前記第二接触面の他方は、クルトシスが3.5〜6.5となるようにクロム化合物で形成されている
振動アクチュエータ。 - 前記第一接触面及び前記第二接触面の他方は、最大高さ粗さが0.13〜1.3μmとなるように形成されている
請求項1に記載の振動アクチュエータ。 - 前記樹脂膜は、ポリアミドイミドを含む
請求項1又は請求項2に記載の振動アクチュエータ。 - 前記クロム化合物は、窒化クロムを含む
請求項1から請求項3のうちいずれか一項に記載の振動アクチュエータ。 - 前記樹脂膜に含まれるフッ素樹脂は、重量比において主剤樹脂を100としたときに20〜40含まれている
請求項1から請求項4のうちいずれか一項に記載の振動アクチュエータ。 - 請求項1から請求項5のうちいずれか一項に記載の振動アクチュエータを備える
レンズ鏡筒。 - 請求項1から請求項5のうちいずれか一項に記載の振動アクチュエータを備える
電子機器。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2011065850A JP2012203085A (ja) | 2011-03-24 | 2011-03-24 | 振動アクチュエータ、レンズ鏡筒及び電子機器 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2011065850A JP2012203085A (ja) | 2011-03-24 | 2011-03-24 | 振動アクチュエータ、レンズ鏡筒及び電子機器 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2012203085A true JP2012203085A (ja) | 2012-10-22 |
| JP2012203085A5 JP2012203085A5 (ja) | 2014-05-08 |
Family
ID=47184192
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2011065850A Pending JP2012203085A (ja) | 2011-03-24 | 2011-03-24 | 振動アクチュエータ、レンズ鏡筒及び電子機器 |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP2012203085A (ja) |
Cited By (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2014233175A (ja) * | 2013-05-30 | 2014-12-11 | 株式会社ニコン | 振動アクチュエータ、レンズ鏡筒及び電子機器 |
| JP2018050467A (ja) * | 2017-11-29 | 2018-03-29 | 株式会社ニコン | 振動アクチュエータ、レンズ鏡筒及び電子機器 |
| WO2022230712A1 (ja) * | 2021-04-27 | 2022-11-03 | キヤノン株式会社 | 振動型アクチュエータ、光学機器および電子機器 |
Citations (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH07194152A (ja) * | 1993-12-28 | 1995-07-28 | Canon Inc | 振動波モータの摩擦部材の形成方法 |
| JPH09327183A (ja) * | 1996-06-06 | 1997-12-16 | Canon Inc | 振動波駆動装置およびこれを備えた装置 |
| JP2004007923A (ja) * | 2002-05-31 | 2004-01-08 | Canon Inc | 振動モータ用摩擦材、この製造方法、振動モータおよび電気機器 |
| JP2007231351A (ja) * | 2006-02-28 | 2007-09-13 | Canon Inc | 表面硬化部材の製造方法、表面硬化部材、及び振動型駆動装置 |
-
2011
- 2011-03-24 JP JP2011065850A patent/JP2012203085A/ja active Pending
Patent Citations (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH07194152A (ja) * | 1993-12-28 | 1995-07-28 | Canon Inc | 振動波モータの摩擦部材の形成方法 |
| JPH09327183A (ja) * | 1996-06-06 | 1997-12-16 | Canon Inc | 振動波駆動装置およびこれを備えた装置 |
| JP2004007923A (ja) * | 2002-05-31 | 2004-01-08 | Canon Inc | 振動モータ用摩擦材、この製造方法、振動モータおよび電気機器 |
| JP2007231351A (ja) * | 2006-02-28 | 2007-09-13 | Canon Inc | 表面硬化部材の製造方法、表面硬化部材、及び振動型駆動装置 |
Cited By (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2014233175A (ja) * | 2013-05-30 | 2014-12-11 | 株式会社ニコン | 振動アクチュエータ、レンズ鏡筒及び電子機器 |
| JP2018050467A (ja) * | 2017-11-29 | 2018-03-29 | 株式会社ニコン | 振動アクチュエータ、レンズ鏡筒及び電子機器 |
| WO2022230712A1 (ja) * | 2021-04-27 | 2022-11-03 | キヤノン株式会社 | 振動型アクチュエータ、光学機器および電子機器 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| US7619348B2 (en) | Motor, lens barrel, camera system, and method for producing motor | |
| US10527815B2 (en) | Vibration actuator, and lens barrel and camera provided with same | |
| JP4882252B2 (ja) | 振動波モータ | |
| JP2012203085A (ja) | 振動アクチュエータ、レンズ鏡筒及び電子機器 | |
| JP2018050467A (ja) | 振動アクチュエータ、レンズ鏡筒及び電子機器 | |
| JP6197787B2 (ja) | 振動アクチュエータ、レンズ鏡筒及び電子機器 | |
| JP6229461B2 (ja) | 振動アクチュエータ、振動アクチュエータの制御装置、レンズ鏡筒及び電子機器 | |
| US6320299B1 (en) | Friction member used in vibration wave driving apparatus, and device using the vibration wave driving apparatus as driving source | |
| JP2014233175A (ja) | 振動アクチュエータ、レンズ鏡筒及び電子機器 | |
| JP2009232622A (ja) | 振動アクチュエータ、レンズ鏡筒、カメラ | |
| JP2022007314A (ja) | 振動アクチュエータ、レンズ鏡筒および電子機器 | |
| JPH05219762A (ja) | 振動波モータ | |
| JP6331334B2 (ja) | 摺動体、振動アクチュエータ及び光学部材 | |
| JP2011010424A (ja) | 振動アクチュエータ、光学機器 | |
| JP6614274B2 (ja) | 摺動体、振動アクチュエータ及び光学部材 | |
| JP2017099209A (ja) | 振動アクチュエータ、レンズ鏡筒及び電子機器 | |
| JP5453781B2 (ja) | 振動波アクチュエータ、それを備えるレンズ鏡筒及びカメラ | |
| JP6589960B2 (ja) | 振動アクチュエータ、振動アクチュエータの制御装置、レンズ鏡筒及び電子機器 | |
| US11644736B2 (en) | Vibration type actuator, camera platform, and electronic device | |
| JPH03178578A (ja) | 振動波駆動装置 | |
| JP2018170952A (ja) | 振動アクチュエータ及び光学機器 | |
| JP2000166266A (ja) | 振動型駆動装置およびこれを備えた機器 | |
| JP2014018016A (ja) | 振動アクチュエータ、レンズ鏡筒及びカメラ | |
| JPH11113272A (ja) | 振動型駆動装置およびこれを備えた装置 | |
| JPH07177768A (ja) | 振動波モータ |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A521 | Written amendment |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20140320 |
|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20140320 |
|
| A521 | Written amendment |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20140404 |
|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20140320 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20150203 |
|
| A02 | Decision of refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A02 Effective date: 20150602 |