JP2012194683A - 制御装置およびシステムプログラム - Google Patents
制御装置およびシステムプログラム Download PDFInfo
- Publication number
- JP2012194683A JP2012194683A JP2011056872A JP2011056872A JP2012194683A JP 2012194683 A JP2012194683 A JP 2012194683A JP 2011056872 A JP2011056872 A JP 2011056872A JP 2011056872 A JP2011056872 A JP 2011056872A JP 2012194683 A JP2012194683 A JP 2012194683A
- Authority
- JP
- Japan
- Prior art keywords
- task
- tasks
- unit
- collection
- reference data
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Granted
Links
Images







Classifications
-
- G—PHYSICS
- G05—CONTROLLING; REGULATING
- G05B—CONTROL OR REGULATING SYSTEMS IN GENERAL; FUNCTIONAL ELEMENTS OF SUCH SYSTEMS; MONITORING OR TESTING ARRANGEMENTS FOR SUCH SYSTEMS OR ELEMENTS
- G05B15/00—Systems controlled by a computer
- G05B15/02—Systems controlled by a computer electric
-
- G—PHYSICS
- G05—CONTROLLING; REGULATING
- G05B—CONTROL OR REGULATING SYSTEMS IN GENERAL; FUNCTIONAL ELEMENTS OF SUCH SYSTEMS; MONITORING OR TESTING ARRANGEMENTS FOR SUCH SYSTEMS OR ELEMENTS
- G05B19/00—Programme-control systems
- G05B19/02—Programme-control systems electric
- G05B19/04—Programme control other than numerical control, i.e. in sequence controllers or logic controllers
- G05B19/042—Programme control other than numerical control, i.e. in sequence controllers or logic controllers using digital processors
- G05B19/0426—Programming the control sequence
-
- G—PHYSICS
- G05—CONTROLLING; REGULATING
- G05B—CONTROL OR REGULATING SYSTEMS IN GENERAL; FUNCTIONAL ELEMENTS OF SUCH SYSTEMS; MONITORING OR TESTING ARRANGEMENTS FOR SUCH SYSTEMS OR ELEMENTS
- G05B19/00—Programme-control systems
- G05B19/02—Programme-control systems electric
- G05B19/04—Programme control other than numerical control, i.e. in sequence controllers or logic controllers
- G05B19/05—Programmable logic controllers, e.g. simulating logic interconnections of signals according to ladder diagrams or function charts
- G05B19/056—Programming the PLC
-
- G—PHYSICS
- G06—COMPUTING; CALCULATING OR COUNTING
- G06F—ELECTRIC DIGITAL DATA PROCESSING
- G06F11/00—Error detection; Error correction; Monitoring
- G06F11/30—Monitoring
- G06F11/32—Monitoring with visual or acoustical indication of the functioning of the machine
- G06F11/323—Visualisation of programs or trace data
-
- G—PHYSICS
- G06—COMPUTING; CALCULATING OR COUNTING
- G06F—ELECTRIC DIGITAL DATA PROCESSING
- G06F9/00—Arrangements for program control, e.g. control units
- G06F9/06—Arrangements for program control, e.g. control units using stored programs, i.e. using an internal store of processing equipment to receive or retain programs
- G06F9/46—Multiprogramming arrangements
- G06F9/52—Program synchronisation; Mutual exclusion, e.g. by means of semaphores
-
- G—PHYSICS
- G06—COMPUTING; CALCULATING OR COUNTING
- G06F—ELECTRIC DIGITAL DATA PROCESSING
- G06F2201/00—Indexing scheme relating to error detection, to error correction, and to monitoring
- G06F2201/865—Monitoring of software
Landscapes
- Engineering & Computer Science (AREA)
- Physics & Mathematics (AREA)
- General Physics & Mathematics (AREA)
- Theoretical Computer Science (AREA)
- Automation & Control Theory (AREA)
- General Engineering & Computer Science (AREA)
- Software Systems (AREA)
- Data Mining & Analysis (AREA)
- Quality & Reliability (AREA)
- Programmable Controllers (AREA)
- Debugging And Monitoring (AREA)
Abstract
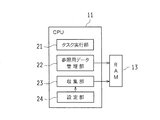
【解決手段】CPUユニットは、複数のタスクを並行に実行し、かつ、複数のタスクの各タスクを各タスクに応じた周期で実行するタスク実行部21と、更新タスクにより更新および参照されるグローバル変数と、グローバル変数に対応し、参照タスクにより参照される参照用データとを記憶するRAM13と、タスク実行部21により複数のタスクが実行されているときに、グローバル変数および参照用データを収集する収集部23とを備える。
【選択図】図5
Description
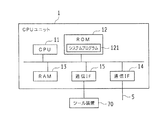
13 RAM(記憶手段)
15 通信IF(通信手段)
21 タスク実行部(タスク実行手段)
22 参照用データ管理部(参照用データ管理手段)
23 収集部(収集手段)
24 設定部(設定手段)
60 制御対象機器
70 ツール装置
121 システムプログラム
Claims (9)
- 制御対象機器を制御する制御装置であって、
プログラムを含むタスクを実行するタスク実行手段と、
プログラムにおいて参照および更新することが可能な変数を記憶する記憶手段と、
前記タスク実行手段によりプログラムを含むタスクが実行されているときに、前記変数を収集する収集手段とを備え、
前記タスク実行手段は、複数の前記タスクを並行に実行し、かつ、前記複数のタスクの各タスクを前記各タスクに応じた周期で実行するように構成され、
前記記憶手段には、前記変数に対応する参照用データが記憶され、
前記複数のタスクは、前記変数を更新および参照することが可能な更新タスクと、前記参照用データを参照することが可能な参照タスクとを含み、
前記収集手段は、前記タスク実行手段により前記複数のタスクが実行されているときに、前記参照用データを収集するように構成されていること
を特徴とする制御装置。 - 請求項1に記載の制御装置であって、
前記収集手段は、前記タスク実行手段により前記複数のタスクが実行されているときに、前記更新タスクにより更新および参照される変数を収集するように構成されていること
を特徴とする制御装置。 - 請求項1または請求項2に記載の制御装置であって、
前記複数のタスクは、1個の前記更新タスクと、複数の前記参照タスクとを含み、
前記記憶手段には、前記変数に対応する参照用データが前記複数の参照タスク毎に記憶され、
前記収集手段は、前記タスク実行手段により前記複数のタスクが実行されているときに、複数の前記参照用データを収集するように構成されていること
を特徴とする制御装置。 - 請求項1から請求項3までのいずれか一つに記載の制御装置であって、
前記記憶手段に記憶される参照用データを管理する参照用データ管理手段を備え、
前記参照用データ管理手段は、前記参照タスクが実行される前に、前記参照用データの値を前記変数の値に変更するように構成されていること
を特徴とする制御装置。 - 請求項1から請求項4までのいずれか一つに記載の制御装置であって、
前記収集手段による収集対象を設定する設定手段を備え、
前記収集手段は、前記タスク実行手段により前記複数のタスクが実行されているときに、前記設定手段により設定された収集対象の値を収集するように構成されていること
を特徴とする制御装置。 - 請求項1から請求項5までのいずれか一つに記載の制御装置であって、
前記収集手段による収集対象と、前記収集対象の値を収集する収集周期とをツール装置から受信するための通信手段を備え、
前記収集手段は、前記タスク実行手段により前記複数のタスクが実行されているときに、前記通信手段により受信した収集対象の値を、前記通信手段により受信した収集周期で収集するように構成されていること
を特徴とする制御装置。 - 請求項6に記載の制御装置であって、
前記通信手段は、前記収集手段により収集された収集結果を前記ツール装置に送信する機能を有すること
を特徴とする制御装置。 - 請求項1から請求項7までのいずれか一つに記載の制御装置であって、
前記記憶手段は、前記収集手段により収集された収集結果を記憶すること
を特徴とする制御装置。 - 制御対象機器を制御する制御装置を、
プログラムを含むタスクを実行するタスク実行手段と、
プログラムにおいて参照および更新することが可能な変数を記憶する記憶手段と、
前記タスク実行手段によりプログラムを含むタスクが実行されているときに、前記変数を収集する収集手段として機能させるシステムプログラムであって、
前記記憶手段には、前記変数に対応する参照用データが記憶され、
前記タスク実行手段は、前記変数を更新および参照することが可能な更新タスクと、前記参照用データを参照することが可能な参照タスクとを含む複数のタスクを並行に実行し、かつ、前記複数のタスクの各タスクを前記各タスクに応じた周期で実行し、
前記収集手段は、前記タスク実行手段により前記複数のタスクが実行されているときに、前記参照用データを収集すること
を特徴とするシステムプログラム。
Priority Applications (5)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2011056872A JP5218585B2 (ja) | 2011-03-15 | 2011-03-15 | 制御装置およびシステムプログラム |
| EP12757853.2A EP2687931B1 (en) | 2011-03-15 | 2012-03-06 | Control device and system program |
| PCT/JP2012/055675 WO2012124542A1 (ja) | 2011-03-15 | 2012-03-06 | 制御装置およびシステムプログラム |
| CN201280011200.6A CN103403634B (zh) | 2011-03-15 | 2012-03-06 | 控制装置及其控制方法 |
| US14/027,578 US9778630B2 (en) | 2011-03-15 | 2013-09-16 | Control device and system program for maintaining global variable and reference data consistency during parallel processing of multiple tasks |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2011056872A JP5218585B2 (ja) | 2011-03-15 | 2011-03-15 | 制御装置およびシステムプログラム |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2012194683A true JP2012194683A (ja) | 2012-10-11 |
| JP5218585B2 JP5218585B2 (ja) | 2013-06-26 |
Family
ID=46830617
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2011056872A Active JP5218585B2 (ja) | 2011-03-15 | 2011-03-15 | 制御装置およびシステムプログラム |
Country Status (5)
| Country | Link |
|---|---|
| US (1) | US9778630B2 (ja) |
| EP (1) | EP2687931B1 (ja) |
| JP (1) | JP5218585B2 (ja) |
| CN (1) | CN103403634B (ja) |
| WO (1) | WO2012124542A1 (ja) |
Cited By (6)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| WO2015162760A1 (ja) * | 2014-04-24 | 2015-10-29 | 三菱電機株式会社 | Plcユニット及びプログラマブルロジックコントローラ |
| KR20180012600A (ko) * | 2016-07-27 | 2018-02-06 | 엘에스산전 주식회사 | 감시제어장치 |
| EP3364313A1 (en) | 2017-02-17 | 2018-08-22 | Omron Corporation | Control device |
| CN109284194A (zh) * | 2018-08-16 | 2019-01-29 | 平安科技(深圳)有限公司 | 数据采集方法、征信主体设备、计算机设备及存储介质 |
| WO2019176755A1 (ja) * | 2018-03-15 | 2019-09-19 | オムロン株式会社 | ネットワークシステム |
| CN109284194B (zh) * | 2018-08-16 | 2024-05-24 | 平安科技(深圳)有限公司 | 数据采集方法、征信主体设备、计算机设备及存储介质 |
Families Citing this family (9)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US9851728B2 (en) * | 2010-12-31 | 2017-12-26 | Google Inc. | Inhibiting deleterious control coupling in an enclosure having multiple HVAC regions |
| JP5252014B2 (ja) * | 2011-03-15 | 2013-07-31 | オムロン株式会社 | 制御装置、制御システム、ツール装置および収集指示プログラム |
| US10191887B2 (en) * | 2013-07-18 | 2019-01-29 | Microsoft Technology Licensing, Llc | Context affinity in a remote scripting environment |
| CN106104397B (zh) * | 2014-03-14 | 2018-07-10 | 欧姆龙株式会社 | 控制装置及控制系统 |
| CN107615189B (zh) * | 2015-05-19 | 2019-04-12 | 三菱电机株式会社 | 可编程逻辑控制器、工程设计工具及存储有工程设计工具程序的存储装置 |
| FR3038990B1 (fr) * | 2015-07-13 | 2019-04-05 | Tlogic Automation | Procede de surveillance et d'expertise du fonctionnement d'une installation industrielle pilotee par un controleur programmable et equipement mettant en œuvre ledit procede |
| DE102016202305A1 (de) | 2016-02-16 | 2017-08-17 | Robert Bosch Gmbh | Verfahren und Vorrichtung zum Betreiben eines Steuergeräts |
| JP6859922B2 (ja) | 2017-10-24 | 2021-04-14 | オムロン株式会社 | 制御装置、制御装置の制御方法、情報処理プログラム、および記録媒体 |
| JP6761158B1 (ja) * | 2019-12-16 | 2020-09-23 | 株式会社安川電機 | プログラム作成装置、プログラム作成方法、及びプログラム |
Citations (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH10511484A (ja) * | 1994-12-21 | 1998-11-04 | ローベルト ボツシユ ゲゼルシヤフト ミツト ベシユレンクテル ハフツング | 技術的プロセスの制御方法 |
| JP2009181443A (ja) * | 2008-01-31 | 2009-08-13 | Omron Corp | 産業用コントローラ用機器 |
| JP2010181923A (ja) * | 2009-02-03 | 2010-08-19 | Yaskawa Electric Corp | ロボットの制御システムおよびリアルタイムos |
Family Cites Families (18)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2001154711A (ja) * | 1999-11-29 | 2001-06-08 | Omron Corp | 工程歩進型プログラムのデバッグ方法および装置 |
| JP2003114908A (ja) * | 2001-10-05 | 2003-04-18 | Omron Corp | データ収集装置及びデータ収集システム並びにプログラム製品 |
| JP2003233403A (ja) * | 2002-02-06 | 2003-08-22 | Toshiba Corp | 制御装置およびプログラミング装置 |
| JP4660058B2 (ja) * | 2002-09-24 | 2011-03-30 | 株式会社東芝 | 監視計測用ネットワーク情報端末 |
| US20070067373A1 (en) * | 2003-11-03 | 2007-03-22 | Steven Higgins | Methods and apparatuses to provide mobile applications |
| JP2005275846A (ja) * | 2004-03-25 | 2005-10-06 | Hitachi Information Systems Ltd | データファイル自動収集システム、データファイル自動収集方法およびそのためのプログラム |
| DE602004029508D1 (de) * | 2004-04-15 | 2010-11-18 | Mitsubishi Electric Corp | Peripherieeinrichtung einer programmierbaren logisür |
| DE102004051952A1 (de) * | 2004-10-25 | 2006-04-27 | Robert Bosch Gmbh | Verfahren zur Datenverteilung und Datenverteilungseinheit in einem Mehrprozessorsystem |
| JP2007219920A (ja) * | 2006-02-17 | 2007-08-30 | Omron Corp | データ収集管理システム |
| US20070198979A1 (en) * | 2006-02-22 | 2007-08-23 | David Dice | Methods and apparatus to implement parallel transactions |
| JP4890545B2 (ja) * | 2006-06-13 | 2012-03-07 | 三菱電機株式会社 | プログラマブルロジックコントローラの周辺装置 |
| JP4609381B2 (ja) * | 2006-06-14 | 2011-01-12 | 株式会社デンソー | 異常監視用プログラム、記録媒体及び電子装置 |
| US20080056239A1 (en) * | 2006-07-13 | 2008-03-06 | Kalat Software, Inc. | VOIP Service Over a Regular Phone |
| JP4883314B2 (ja) * | 2007-12-12 | 2012-02-22 | オムロン株式会社 | Plcを用いたデータトレースシステム |
| JP5186334B2 (ja) * | 2008-11-06 | 2013-04-17 | インターナショナル・ビジネス・マシーンズ・コーポレーション | 変換装置、プログラムおよび変換方法 |
| JP2010170536A (ja) * | 2008-12-26 | 2010-08-05 | Omron Corp | プログラマブル・コントローラ |
| US8776061B2 (en) * | 2010-12-16 | 2014-07-08 | International Business Machines Corporation | Real-time distributed monitoring of local and global processor resource allocations and deallocations |
| US9377769B2 (en) | 2011-03-15 | 2016-06-28 | Omron Corporation | Control apparatus for updating a user program while processing is being performed and recording medium |
-
2011
- 2011-03-15 JP JP2011056872A patent/JP5218585B2/ja active Active
-
2012
- 2012-03-06 CN CN201280011200.6A patent/CN103403634B/zh active Active
- 2012-03-06 WO PCT/JP2012/055675 patent/WO2012124542A1/ja active Application Filing
- 2012-03-06 EP EP12757853.2A patent/EP2687931B1/en active Active
-
2013
- 2013-09-16 US US14/027,578 patent/US9778630B2/en active Active
Patent Citations (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH10511484A (ja) * | 1994-12-21 | 1998-11-04 | ローベルト ボツシユ ゲゼルシヤフト ミツト ベシユレンクテル ハフツング | 技術的プロセスの制御方法 |
| JP2009181443A (ja) * | 2008-01-31 | 2009-08-13 | Omron Corp | 産業用コントローラ用機器 |
| JP2010181923A (ja) * | 2009-02-03 | 2010-08-19 | Yaskawa Electric Corp | ロボットの制御システムおよびリアルタイムos |
Cited By (10)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| WO2015162760A1 (ja) * | 2014-04-24 | 2015-10-29 | 三菱電機株式会社 | Plcユニット及びプログラマブルロジックコントローラ |
| JPWO2015162760A1 (ja) * | 2014-04-24 | 2017-04-13 | 三菱電機株式会社 | Plcユニット及びプログラマブルロジックコントローラ |
| US10073431B2 (en) | 2014-04-24 | 2018-09-11 | Mitsubishi Electric Corporation | PLC unit and programmable logic controller |
| KR20180012600A (ko) * | 2016-07-27 | 2018-02-06 | 엘에스산전 주식회사 | 감시제어장치 |
| KR102492399B1 (ko) | 2016-07-27 | 2023-01-26 | 엘에스일렉트릭(주) | 감시제어장치 |
| EP3364313A1 (en) | 2017-02-17 | 2018-08-22 | Omron Corporation | Control device |
| WO2019176755A1 (ja) * | 2018-03-15 | 2019-09-19 | オムロン株式会社 | ネットワークシステム |
| US11374788B2 (en) | 2018-03-15 | 2022-06-28 | Omron Corporation | Network system having master device carrying out part of a process and slave device carrying out remainder of the process |
| CN109284194A (zh) * | 2018-08-16 | 2019-01-29 | 平安科技(深圳)有限公司 | 数据采集方法、征信主体设备、计算机设备及存储介质 |
| CN109284194B (zh) * | 2018-08-16 | 2024-05-24 | 平安科技(深圳)有限公司 | 数据采集方法、征信主体设备、计算机设备及存储介质 |
Also Published As
| Publication number | Publication date |
|---|---|
| EP2687931A4 (en) | 2015-08-26 |
| CN103403634A (zh) | 2013-11-20 |
| CN103403634B (zh) | 2016-08-10 |
| US20140018939A1 (en) | 2014-01-16 |
| WO2012124542A1 (ja) | 2012-09-20 |
| US9778630B2 (en) | 2017-10-03 |
| EP2687931A1 (en) | 2014-01-22 |
| JP5218585B2 (ja) | 2013-06-26 |
| EP2687931B1 (en) | 2019-05-08 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP5218585B2 (ja) | 制御装置およびシステムプログラム | |
| JP5252014B2 (ja) | 制御装置、制御システム、ツール装置および収集指示プログラム | |
| JP5747584B2 (ja) | 制御装置およびシステムプログラム | |
| JP5661222B1 (ja) | 監視制御システム及び制御装置 | |
| JP2018530443A (ja) | リアルタイム制御システム、リアルタイム制御装置及びシステムの制御方法 | |
| JP5796311B2 (ja) | 制御装置およびシステムプログラム | |
| JP2011028752A5 (ja) | ||
| TWI534569B (zh) | 控制裝置、開發裝置,及開發程式 | |
| JP2018151726A (ja) | 制御装置およびプログラム | |
| EP2733613B1 (en) | Controller and program | |
| WO2015136973A1 (ja) | 制御装置及び制御システム | |
| JP4883314B2 (ja) | Plcを用いたデータトレースシステム | |
| JP5241388B2 (ja) | ログデータ取得システムおよびプログラマブル表示器 | |
| JP5549455B2 (ja) | プログラマブルコントローラシステムおよびそのプログラム更新方法 | |
| CN111586087B (zh) | 通信系统、通信方法和程序 | |
| US20210405597A1 (en) | Engineering device, engineering method, and information storage medium | |
| JP2013029914A (ja) | 制御プログラム試験装置、制御プログラム試験システム、及び制御プログラムの試験方法 | |
| JP6394014B2 (ja) | 制御システム及びプログラム部品 | |
| CN103365756B (zh) | 数据分层监控系统及监控方法 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20120727 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20130205 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20130218 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20160315 Year of fee payment: 3 |
|
| R150 | Certificate of patent or registration of utility model |
Ref document number: 5218585 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 Free format text: JAPANESE INTERMEDIATE CODE: R150 |