JP2012183621A - プレパラート用グリッパーヘッド - Google Patents
プレパラート用グリッパーヘッド Download PDFInfo
- Publication number
- JP2012183621A JP2012183621A JP2011049711A JP2011049711A JP2012183621A JP 2012183621 A JP2012183621 A JP 2012183621A JP 2011049711 A JP2011049711 A JP 2011049711A JP 2011049711 A JP2011049711 A JP 2011049711A JP 2012183621 A JP2012183621 A JP 2012183621A
- Authority
- JP
- Japan
- Prior art keywords
- thin
- base
- frame
- center
- coil
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Granted
Links
Images










Landscapes
- Microscoopes, Condenser (AREA)
- Manipulator (AREA)
- Linear Motors (AREA)
Abstract
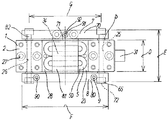
【解決手段】 凹状装着部21に薄型コイル30を装着し、該凹状装着部21を挟む左右端がわ夫々に左右ガイドレール部24,24を形成したベース2を設けると共に、進退枠60から薄型マグネット32を有するヨーク61を突設し左右端がわから左右スライドピン64,64を延伸した可動体6を形成し、該薄型マグネット32を薄型コイル30に対峙可能とするよう、左右スライドピン64,64夫々を左右ガイドレール部24,24に前後進退自在に組み込んだ上、ベース2の後辺寄り下面適所、および、可動体6進退枠60の下面適所夫々に、三点クランプピン9を垂下、突設してなるプレパラートP用グリッパーヘッド1である。
【選択図】 図1
Description
地域医療および遠隔医療の発展に伴い、近年はテーラーメード医療へのニーズが高まり、国内外の課題となっている病理医の不足を補う新たな診断ツールとして、患者から得られた臓器、組織、血液、細胞、分子、遺伝子などから顕微鏡標本を作製し、光学顕微鏡や電子顕微鏡に供給しながらデジタル映像化するバーチャルスライド作製装置(バーチャルスライド:登録商標)の導入が進められているが、多くの顕微鏡標本をデジタル映像化する作業は、検体1枚当りに費やす時間が、検体の大きさや意図とする精査に対応する倍率により異なるが概ね数分〜数十分必要で、多大な時間と労力負担とを強いられる上、撮影処理の間オペレーターが常時機器の前で待機している必要があり、大変非効率的なものとなっていた。
こうした状況を反映し、その打開策となるような提案もこれまでに散見されない訳ではない。
例えば、下記の特許文献1(1)に提案されているものに代表されるように、撮像部に対し、搭載した試料(プレパラート)を水平方向および垂直方向に移動させるステージ移動部を設け、画像処理部および記録・再生部を有する顕微鏡システムをはじめ、特許文献1(2)に示されているように、プレパラート収納マガジンから、試料の入ったプレパラートを負圧により吸着保持して取り出し、顕微鏡の対物レンズの直下に移動させるプレパラート保持ハンドを有したプレパラート自動交換装置、または特許文献1(3)に見られるような、装置本体に収容された多数枚のガラス板の最下位のガラス板と接触するローラを駆動し、ガラス板とローラとの摩擦力によってガラス板を送出するようにしたプレパラート用ガラス板自動操出装置、さらにまた特許文献1(4)のような、グリッパー上部の駆動機構を薄型化し、搬送作業空間を効率的に活用できるようにした移送ロボット用ハンド装置などが散見される。
上述したとおり、従前までに提案のある各種顕微鏡システム、および各種プレパラート自動交換装置やプレパラート用ガラス自動操出装置類などは、何れも無人で効率的に、多数枚のプレパラートを顕微鏡ステージ上に順次供給、送出しながら、無人でデジタル画像データ化することは非常に困難であり、特に、プレパラートを把持、搬送するハンド装置類は、真空ポンプなどが不可欠で大型化してしまったり、構造の複雑なリンク機構を駆使したものでは、搬送の対象が略一定形状、寸法のプレパラートに制限されてしまったりと様々な欠点を残すものであり、永年、様々な利用者に対し、画像処理装置の開発、提供に携わり、顕微鏡画像のデジタル映像化技術を提供し続けてきている中、それらから得られた様々な知見やユーザーからの情報などを契機に、顕微鏡ステージ上の狭いスペースにプレパラートを水平姿勢のまま周囲に干渉することなく搬送し、各部の摩耗を避ける目的からステージ上でプレパラートを滑らせることなく安全に把持、移送するという機能上の課題を解決するのは勿論のこと、装置の大型化を阻止し、スペース効率を高めたものとすると共に、デジタル画像化作業工程上からも、正確且つ効率的なデータ化を実現可能とするための構成につき、更なる改善の可能性を痛感するに至ったものである。
そこで、この発明は、プレパラートの周縁端面の複数箇所を同時把持且つ水平保持可能とする上、顕微鏡ステージ上と対物レンズとの極狭い空間内に効率的にプレパラートを搬送できる程度に充分に軽量・小型・薄型化してなる新たなロボットハンド技術の開発はできないものかとの判断から、逸速くその開発、研究に着手し、長期に渡る試行錯誤と幾多の試作、実験とを繰り返してきた結果、今回、遂に新規な構造のプレパラート用グリッパーヘッドを実現化することに成功したものであり、以下では、図面に示すこの発明を代表する実施例と共に、その構成を詳述することとする。
図面に示すこの発明を代表する実施例からも明確に理解されるように、この発明のプレパラート用グリッパーヘッドは、基本的に次のような構成から成り立っている。
即ち、矩形状平板の前辺左右間中央から、これとは反対がわの後辺中央付近に達するよう凹設した凹状装着部に、駆動モータ用の薄型コイルかまたは薄型マグネットかの何れか一方を装着し、該凹状装着部を挟む左右端がわ夫々に、該前辺および後辺の夫々に直交する方向に平行、且つ互いに平行な左右ガイドレール部を形成したベースを設けると共に、該ベース前辺に凹状装着部を左右跨ぎ対峙可能な進退枠の左右間中央から、凹状装着部薄型コイルか薄型マグネットかの何れか一方に対峙可能であって、駆動モータ用の薄型コイルかまたは薄型マグネットかの何れか他方を装着したヨークを突設し、該進退枠のヨークを挟む左右端がわから左右スライドピンを互いに平行に延伸した可動体を形成し、該可動体進退枠ヨークの薄型コイルまたは薄型マグネットの何れか他方をベース薄型コイルまたは薄型マグネットの何れか一方に対峙可能とするよう、該進退枠左右スライドピン夫々を当該ベース左右ガイドレール部に前後進退自在に組み込み、左右スライドピン各適所に進退枠の前進量を規制可能とするストッパを設けた上、水平姿勢とした場合の当該ベースの後辺寄り下面適所に、左右端クランプピンか、中央クランプピンかの何れか一方を垂下、突設し、且つ、可動体進退枠の下面適所に、左右端クランプピンか、中央クランプピンかの何れか他方を垂下、突設して三点クランプピンを形成してなるものとした、構成を要旨とするプレパラート用グリッパーヘッドである。
ベースは、グリッパーヘッドをロボットアームやスライドレールなどの移動装置がわに着脱不能か、または、着脱可能かの何れかにて装着可能とすると共に、駆動モータの薄型コイルかまたは薄型マグネットかの何れか一方、および可動体を組込み可能、且つ、夫々動作可能とする機能を果たすものであり、矩形状平板前後辺の少なくとも何れか一方に、可動体の進退枠を進退自在に設けることができるものとし、しかも軽量、薄型のものとしなければならず、後述する実施例に示すように、必要に応じて駆動モータなど内部構造を保護可能な外カバー類を装着してなるものとすることができ、また、矩形状平板の前辺左右間中央から、これとは反対がわの後辺中央付近に達するよう凹設した凹状装着部に、駆動モータ用の薄型コイルおよび電力供給部を配線装着し、該凹状装着部を挟む左右端がわ夫々に、該前辺および後辺の夫々に直交する方向に平行、且つ互いに平行な左右ガイドレール部を形成したものとするのが望ましい。
以下では、図面に示すこの発明を代表する実施例と共に、その構造について詳述することとする。
以上のとおりの構成からなるこの発明のプレパラートP用グリッパーヘッド1は、図1および図2中に示すように、その外郭寸法を前後巾27mm、左右巾60mm、厚さ8mmに抑え、総重量を47.5gに削減してあるから、従来型(例えば前後巾123mm、左右巾155mm、厚さ60mm、重量1.11kg)のものに比較して体積比で2.2%(約1/45)、重量比では4.5%(約1/22)と、遙かに小型・薄型化、軽量化したものとなり、顕微鏡ステージ上と対物レンズとの間の極狭いスペースにも干渉せずに効率的且つ安全に移動可能なものとなり、しかも挟持動作の耐久寿命を10倍前後(従来型では10万回程度のものであったが、100万回の耐久試験を実施し合格済み)まで延命化することができた。
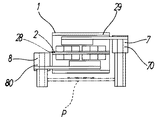
この発明のプレパラートP用の改良型グリッパーヘッド1は、図9ないし図12に示すように、ベース2の前後辺がわ夫々に表可動体7表進退枠70および裏可動体8裏進退枠80を合計8個の軸受けb,b,……を介してより一段と低摩擦且つ高速で円脱に進退駆動可能とするよう組み込んでなるものとしてあるから、表裏進退枠70,80夫々の進退移動距離を前記実施例1のものに比較して約1/2に短縮し、しかも各表可動体7および裏可動体8を同時に進退動作可能で、把持動作に伴うプレパラートPの水平方向の滑動を最小限度に抑え、プレパラートPや顕微鏡ステージなどの摩耗を一段と軽減することができると共に、プレパラートPの1回の挟持・解放毎に要する動作時間を半減することができ、しかも開閉に伴う振動や衝撃を互いの動きで相殺可能となり、一段と静粛且つ安全、迅速にプレパラートPを水平把持、搬送することができるものになる。
叙述の如く、この発明のプレパラート用グリッパーヘッドは、その新規な構成によって所期の目的を遍く達成可能とするものであり、しかも製造も容易で、従前からのロボットハンド技術に比較して部品点数を大幅に削減して格段に小型・軽量・薄型化することができ、しかも耐久強度を高め、低廉化して遥かに経済的なものとすることができる上、大量のプレパラート上の標本を24時間、無人でデジタル画像データ化することが可能となり、標本管理や病理検査、画像解析、遠隔医療など様々な分野の作業効率を格段に高め、人件費を大幅に削減することが可能となり、病理医不足に起因する診断の遅れなどを解消できることとなるから、従前までは必ずオペレーターが立ち会いデジタルデータ化作業を行わざるを得なかった医療業界、およびデジタル映像化技術を提供する医療機器業界はもとより、より低価格で早期診断が可能な医療を希望する一般家庭や、新薬の研究開発経費を削減したい医薬品業界においても高く評価され、広範に渡って利用、普及していくものになると予想される。
2 ベース
20 同 ヨーク用収容溝
21 同 凹状装着部
22 同 表凹状装着部
23 同 裏凹状装着部
24 同 左右ガイドレール部
25 同 表左右ガイドレール部
26 同 裏左右ガイドレール部
27 同 取付部
28 同 中層隔壁
29 同 カバーパネル
3 駆動モータ
30 同 薄型コイル
31 同 電源コネクタ(電力供給部)
32 同 薄型マグネット
33 同 薄型表マグネット
34 同 薄型裏マグネット
4 表駆動モータ
40 同 薄型表コイル
5 裏駆動モータ
50 同 薄型裏コイル
6 可動体
60 同 進退枠
61 同 ヨーク
62 同 天板部
63 同 下板部
64 同 左右スライドピン
65 同 ストッパ
7 表可動体
70 同 表進退枠
71 同 表ヨーク
72 同 表左右スライドピン
8 裏可動体
80 同 裏進退枠
81 同 裏ヨーク
82 同 裏左右スライドピン
9 三点クランプピン
90 同 左右後クランプピン
91 同 中前クランプピン
92 同 クッションパイプ
b 軸受け
P プレパラート
A グリッパーヘッドの左右全巾寸法
B 可動体6の前後全巾寸法
C ベースの全厚さ寸法
D ベースの前後巾寸法
E 表裏進退枠までの前後巾寸法
F 表裏進退枠夫々の左右巾寸法
G 表裏左右スライドピン夫々の左右軸心間距離
H ベースの上下厚み寸法
J ベース下面から三点クランプピンの垂下、突出寸法
K 左右後クランプピンの左右中心間距離
L 三点クランプピンの側面視最小挟持中心間距離
M 三点クランプピンの側面視最大挟持中心間距離
Claims (6)
- 矩形状平板の前辺左右間中央から、これとは反対がわの後辺中央付近に達するよう凹設した凹状装着部に、駆動モータ用の薄型コイルかまたは薄型マグネットかの何れか一方を装着し、該凹状装着部を挟む左右端がわ夫々に、該前辺および後辺の夫々に直交する方向に平行、且つ互いに平行な左右ガイドレール部を形成したベースを設けると共に、該ベース前辺に凹状装着部を左右跨ぎ対峙可能な進退枠の左右間中央から、凹状装着部薄型コイルか薄型マグネットかの何れか一方に対峙可能であって、駆動モータ用の薄型コイルかまたは薄型マグネットかの何れか他方を装着したヨークを突設し、該進退枠のヨークを挟む左右端がわから左右スライドピンを互いに平行に延伸した可動体を形成し、該可動体進退枠ヨークの薄型コイルまたは薄型マグネットの何れか他方をベース薄型コイルまたは薄型マグネットの何れか一方に対峙可能とするよう、該進退枠左右スライドピン夫々を当該ベース左右ガイドレール部に前後進退自在に組み込み、左右スライドピン各適所に進退枠の前進量を規制可能とするストッパを設けた上、水平姿勢とした場合の当該ベースの後辺寄り下面適所に、左右端クランプピンか、中央クランプピンかの何れか一方を垂下、突設し、且つ、可動体進退枠の下面適所に、左右端クランプピンか、中央クランプピンかの何れか他方を垂下、突設して三点クランプピンを形成してなるものとしたことを特徴とするプレパラート用グリッパーヘッド。
- 矩形状平板の前辺左右間中央から、これとは反対がわの後辺中央付近に達するよう凹設した凹状装着部に、駆動モータ用の薄型コイルかまたは薄型マグネットかの何れか一方を装着し、該凹状装着部を挟む左右端がわ夫々に、該前辺および後辺の夫々に直交する方向に平行、且つ互いに平行な左右ガイドレール部を形成したベースを設けると共に、該ベース前辺に凹状装着部を左右跨ぎ対峙可能な進退枠の左右間中央から、凹状装着部薄型コイルか薄型マグネットかの何れか一方に対峙可能であって、駆動モータ用の薄型コイルかまたは薄型マグネットかの何れか他方を装着したヨークを突設し、該進退枠のヨークを挟む左右端がわから左右スライドピンを互いに平行に延伸した可動体を形成し、該可動体進退枠ヨークの薄型コイルまたは薄型マグネットの何れか他方をベース薄型コイルまたは薄型マグネットの何れか一方に対峙可能とするよう、該進退枠左右スライドピン夫々を当該ベース左右ガイドレール部に前後進退自在に組み込み、左右スライドピン各適所に進退枠の前進量を規制可能とするストッパを設けた上、水平姿勢とした場合の当該ベースの後辺寄り下面適所に、左右端クランプピンか、中央クランプピンかの何れか一方を垂下、突設し、且つ、可動体進退枠の下面適所に、左右端クランプピンか、中央クランプピンかの何れか他方を垂下、突設して三点クランプピンを形成し、当該駆動モータが可動体をベースに対して前進駆動した場合に三点クランプピンを開放し、当該駆動モータが可動体をベースに対して後退駆動した場合に、三点クランプピン間に水平姿勢のプレパラート外周縁の三点を挟持可能としてなるものとしたことを特徴とするプレパラート用グリッパーヘッド。
- 矩形状平板の前辺左右間中央から、これとは反対がわの後辺中央付近に達するよう凹設した凹状装着部に、駆動モータ用の薄型コイルおよび電力供給部を配線装着し、該凹状装着部を挟む左右端がわ夫々に、該前辺および後辺の夫々に直交する方向に平行、且つ互いに平行な左右ガイドレール部を形成したベースを設けると共に、該ベース前辺に凹状装着部を左右跨ぎ対峙可能な進退枠の左右間中央から、凹状装着部薄型コイルに対峙可能であって、薄型マグネットを有するヨークを突設し、該進退枠のヨークを挟む左右端がわから左右スライドピンを互いに平行に延伸した可動体を形成し、該可動体進退枠のヨーク薄型マグネットをベース薄型コイルに対峙可能とするよう、該進退枠左右スライドピン夫々を当該ベース左右ガイドレール部に前後進退自在に組み込み、左右スライドピン各適所に進退枠の前進量を規制可能とするストッパを設けた上、水平姿勢とした場合の当該ベースの後辺寄り下面適所に、左右端クランプピンか、中央クランプピンかの何れか一方を垂下、突設し、且つ、可動体進退枠の下面適所に、左右端クランプピンか、中央クランプピンかの何れか他方を垂下、突設して三点クランプピンを形成してなるものとしたことを特徴とするプレパラート用グリッパーヘッド。
- 矩形状平板の前辺左右間中央から、これとは反対がわの後辺中央付近に達するよう凹設した凹状装着部に、駆動モータ用の薄型コイルおよび電力供給部を配線装着し、該凹状装着部を挟む左右端がわ夫々に、該前辺および後辺の夫々に直交する方向に平行、且つ互いに平行な左右ガイドレール部を形成したベースを設けると共に、該ベース前辺に凹状装着部を左右跨ぎ対峙可能な進退枠の左右間中央から、凹状装着部薄型コイルに対峙可能であって、薄型マグネットを有するヨークを突設し、該進退枠のヨークを挟む左右端がわから左右スライドピンを互いに平行に延伸した可動体を形成し、該可動体進退枠のヨーク薄型マグネットをベース薄型コイルに対峙可能とするよう、該進退枠左右スライドピン夫々を当該ベース左右ガイドレール部に前後進退自在に組み込み、左右スライドピン各適所に進退枠の前進量を規制可能とするストッパを設けた上、水平姿勢とした場合の当該ベース凹状装着部の左右がわ後辺寄りとなる下面左右対称箇所夫々に左右後クランプピン、および、可動体進退枠の左右間中央となる下面適所に中前クランプピンを夫々垂下、突設し、三点クランプピンを形成してなるものとしたことを特徴とするプレパラート用グリッパーヘッド。
- 矩形状平板表面壁の前辺左右間中央から、これとは反対がわの後辺中央付近に達するよう凹設した表凹状装着部に、表駆動モータ用の薄型表コイルかまたは薄型表マグネットかの何れか一方を装着し、同矩形状平板裏面壁の後辺左右間中央から、これとは反対がわの前辺中央付近に達するよう凹設した裏凹状装着部に、裏駆動モータ用の薄型裏コイルかまたは薄型表マグネットかの何れか一方を装着し、該表凹状装着部を挟む左右端がわ夫々に、該前辺および後辺の夫々に直交する方向に平行、且つ互いに平行な表左右ガイドレール部を形成し、且つ、該裏凹状装着部を挟む左右端がわ夫々に、該前辺および後辺の夫々に直交する方向に平行、且つ互いに平行な裏左右ガイドレール部を形成した表裏二重構造のベースを設けると共に、該ベース前辺に表凹状装着部を左右跨ぎ対峙可能とした表進退枠の左右間中央から、表凹状装着部薄型表コイルまたは薄型表マグネットの何れか一方に対峙可能であって、薄型表コイルかまたは薄型表マグネットかの何れか他方を有する表ヨークを突設し、該表進退枠の表ヨークを挟む左右端がわから表左右スライドピンを互いに平行に延伸した表可動体を形成し、該表可動体表進退枠の表ヨーク薄型表コイルかまたは薄型表マグネットかの何れか他方を当該ベース表凹状装着部薄型表コイルまたは薄型表マグネットの何れか一方に対峙可能とするよう、該表進退枠表左右スライドピン夫々を当該ベース表左右ガイドレール部に前後進退自在に組み込み、該ベース後辺に裏凹状装着部を左右跨ぎ対峙可能とした裏進退枠の左右間中央から、裏凹状装着部薄型裏コイルまたは薄型裏マグネットの何れか一方に対峙可能であって、薄型裏コイルかまたは薄型裏マグネットかの何れか他方を有する裏ヨークを突設し、該裏進退枠の裏ヨークを挟む左右端がわから裏左右スライドピンを互いに平行に延伸した裏可動体を形成し、該裏可動体裏進退枠の裏ヨーク薄型裏コイルかまたは薄型裏マグネットかの何れか他方を当該ベース薄型裏コイル薄型裏コイルまたは薄型裏マグネットの何れか一方に対峙可能とするよう、該裏進退枠裏左右スライドピン夫々を当該ベース裏左右ガイドレール部に前後進退自在に組み込み、表裏各左右スライドピンの夫々適所に表裏進退枠の前後突出量を夫々規制可能とするストッパを設けた上、当該ベースを水平姿勢とした場合の表可動体表進退枠か、裏可動体裏進退枠かの何れか一方の下面左右端寄りとなる左右対称箇所に左右クランプピン、および、表可動体表進退枠か、裏可動体裏進退枠かの何れか他方の左右間中央となる下面適所に中央クランプピンを夫々垂下、突設し、三点クランプピンを形成してなるものとしたことを特徴とするプレパラート用グリッパーヘッド。
- ベースが、その適所にロボットアームの先端などに着脱可能となる取付部を形成し、三点クランプピンの夫々にクッションパイプを装着してなるものとした、請求項1ないし5何れか一項記載のプレパラート用グリッパーヘッド。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2011049711A JP5787436B2 (ja) | 2011-03-07 | 2011-03-07 | プレパラート用グリッパーヘッド |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2011049711A JP5787436B2 (ja) | 2011-03-07 | 2011-03-07 | プレパラート用グリッパーヘッド |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2012183621A true JP2012183621A (ja) | 2012-09-27 |
| JP5787436B2 JP5787436B2 (ja) | 2015-09-30 |
Family
ID=47014173
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2011049711A Expired - Fee Related JP5787436B2 (ja) | 2011-03-07 | 2011-03-07 | プレパラート用グリッパーヘッド |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP5787436B2 (ja) |
Cited By (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN108393861A (zh) * | 2018-02-11 | 2018-08-14 | 合肥中科奥威智能科技有限公司 | 一种人机交互式智能机器人 |
| CN115946146A (zh) * | 2023-03-16 | 2023-04-11 | 季华实验室 | 一种用于机械手的两自由度执行机构及驱动方法 |
Families Citing this family (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN109664260B (zh) * | 2018-11-21 | 2020-11-03 | 杭州亚美利嘉科技有限公司 | 悬挂式机器人导轨方向定位装置及其定位方法 |
Citations (14)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPS5953320U (ja) * | 1982-10-01 | 1984-04-07 | 明星電気株式会社 | スライドグラスの取出し装置 |
| JPS62178095U (ja) * | 1986-04-28 | 1987-11-12 | ||
| US5163729A (en) * | 1991-08-22 | 1992-11-17 | Nicky Borcea | Parallel gripper assembly |
| JPH0561143U (ja) * | 1992-01-27 | 1993-08-10 | 武藤化学薬品株式会社 | プレパラート用ガラス板自動繰出装置 |
| JPH05241075A (ja) * | 1992-03-02 | 1993-09-21 | Olympus Optical Co Ltd | 顕微鏡システム |
| WO1996012170A1 (en) * | 1994-10-14 | 1996-04-25 | Becton Dickinson And Company | Automatic slide handling and feeding apparatus |
| JP2001198873A (ja) * | 2000-01-13 | 2001-07-24 | Fuji Mach Mfg Co Ltd | リニアモータチャックおよび電気部品装着システム |
| JP2002355786A (ja) * | 2001-05-30 | 2002-12-10 | Fuji Mach Mfg Co Ltd | 電子部品のクランプ機構及びクランプ装置 |
| JP2004136400A (ja) * | 2002-10-17 | 2004-05-13 | Toshiba Corp | チャック装置 |
| JP2005292725A (ja) * | 2004-04-05 | 2005-10-20 | Direct Communications:Kk | プレパラート自動交換装置 |
| JP2010186850A (ja) * | 2009-02-12 | 2010-08-26 | Yaskawa Electric Corp | 基板把持ハンド、基板把持機構およびそれを備えた基板搬送装置、製造装置 |
| JP2011222683A (ja) * | 2010-04-08 | 2011-11-04 | Yaskawa Electric Corp | 把持装置 |
| JP2012013953A (ja) * | 2010-06-30 | 2012-01-19 | Sony Corp | スライドガラス保管器、搬送装置及び顕微鏡システム |
| JP2012105517A (ja) * | 2010-11-15 | 2012-05-31 | Smc Corp | リニアアクチュエータ |
-
2011
- 2011-03-07 JP JP2011049711A patent/JP5787436B2/ja not_active Expired - Fee Related
Patent Citations (14)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPS5953320U (ja) * | 1982-10-01 | 1984-04-07 | 明星電気株式会社 | スライドグラスの取出し装置 |
| JPS62178095U (ja) * | 1986-04-28 | 1987-11-12 | ||
| US5163729A (en) * | 1991-08-22 | 1992-11-17 | Nicky Borcea | Parallel gripper assembly |
| JPH0561143U (ja) * | 1992-01-27 | 1993-08-10 | 武藤化学薬品株式会社 | プレパラート用ガラス板自動繰出装置 |
| JPH05241075A (ja) * | 1992-03-02 | 1993-09-21 | Olympus Optical Co Ltd | 顕微鏡システム |
| WO1996012170A1 (en) * | 1994-10-14 | 1996-04-25 | Becton Dickinson And Company | Automatic slide handling and feeding apparatus |
| JP2001198873A (ja) * | 2000-01-13 | 2001-07-24 | Fuji Mach Mfg Co Ltd | リニアモータチャックおよび電気部品装着システム |
| JP2002355786A (ja) * | 2001-05-30 | 2002-12-10 | Fuji Mach Mfg Co Ltd | 電子部品のクランプ機構及びクランプ装置 |
| JP2004136400A (ja) * | 2002-10-17 | 2004-05-13 | Toshiba Corp | チャック装置 |
| JP2005292725A (ja) * | 2004-04-05 | 2005-10-20 | Direct Communications:Kk | プレパラート自動交換装置 |
| JP2010186850A (ja) * | 2009-02-12 | 2010-08-26 | Yaskawa Electric Corp | 基板把持ハンド、基板把持機構およびそれを備えた基板搬送装置、製造装置 |
| JP2011222683A (ja) * | 2010-04-08 | 2011-11-04 | Yaskawa Electric Corp | 把持装置 |
| JP2012013953A (ja) * | 2010-06-30 | 2012-01-19 | Sony Corp | スライドガラス保管器、搬送装置及び顕微鏡システム |
| JP2012105517A (ja) * | 2010-11-15 | 2012-05-31 | Smc Corp | リニアアクチュエータ |
Cited By (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN108393861A (zh) * | 2018-02-11 | 2018-08-14 | 合肥中科奥威智能科技有限公司 | 一种人机交互式智能机器人 |
| CN115946146A (zh) * | 2023-03-16 | 2023-04-11 | 季华实验室 | 一种用于机械手的两自由度执行机构及驱动方法 |
| CN115946146B (zh) * | 2023-03-16 | 2023-05-05 | 季华实验室 | 一种用于机械手的两自由度执行机构及驱动方法 |
Also Published As
| Publication number | Publication date |
|---|---|
| JP5787436B2 (ja) | 2015-09-30 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| US10696185B2 (en) | Unmanned aerial vehicle dock and battery replacement device thereof | |
| JP5787436B2 (ja) | プレパラート用グリッパーヘッド | |
| KR101532357B1 (ko) | 백라이트유닛 조립장치 | |
| US20130020175A1 (en) | Sample transport systems and methods | |
| BR112014005007B1 (pt) | Cassete portador de lâmina para microscópio | |
| EP2051281A3 (en) | Motorized manipulator for positioning a TEM specimen | |
| CN103286558B (zh) | 一种夹子组装机 | |
| CN110987810A (zh) | 玻片分析机 | |
| CN102122065A (zh) | 显微镜载玻片自动供给装置 | |
| CN214161666U (zh) | 电极搬运机器人 | |
| CN204027525U (zh) | 一种精密轴外径、总长度的自动检测设备 | |
| CN204027521U (zh) | 一种精密轴跳动和同轴度自动检测设备 | |
| CN112828917A (zh) | 机器人系统以及工具更换方法 | |
| JP2017044819A (ja) | ステージ装置及び顕微鏡システム | |
| ES2526916T3 (es) | Sistema porta-herramientas | |
| CN211553776U (zh) | 一种单驱丝杆传动检测装置 | |
| US9250433B2 (en) | Microscope system with plural attachable/detachable objective lens units | |
| CN210635369U (zh) | 一种花篮夹持搬运装置 | |
| CN210703457U (zh) | 一种上料夹具 | |
| CN211568731U (zh) | 一种医学检验用具分类放置的医学检验箱 | |
| CN211978482U (zh) | 一种带定位检测功能的全自动染色工作台 | |
| CN112743305A (zh) | 一种上料夹具 | |
| CN111007066A (zh) | 一种单驱丝杆传动检测装置 | |
| CN205099669U (zh) | 微生物检验工作台 | |
| JP2016171753A (ja) | ピペットホルダ、マイクロマニピュレータ、マイクロインジェクションシステム、及びマイクロインジェクション方法 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20140307 |
|
| A711 | Notification of change in applicant |
Free format text: JAPANESE INTERMEDIATE CODE: A711 Effective date: 20140307 |
|
| A521 | Written amendment |
Free format text: JAPANESE INTERMEDIATE CODE: A821 Effective date: 20140307 |
|
| A521 | Written amendment |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20140618 |
|
| A521 | Written amendment |
Free format text: JAPANESE INTERMEDIATE CODE: A821 Effective date: 20140618 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20141226 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20150106 |
|
| A521 | Written amendment |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20150306 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20150526 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20150630 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20150727 |
|
| R150 | Certificate of patent or registration of utility model |
Ref document number: 5787436 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 |
|
| R150 | Certificate of patent or registration of utility model |
Ref document number: 5787436 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 |
|
| LAPS | Cancellation because of no payment of annual fees |