JP2012143089A - モータ - Google Patents
モータ Download PDFInfo
- Publication number
- JP2012143089A JP2012143089A JP2011000178A JP2011000178A JP2012143089A JP 2012143089 A JP2012143089 A JP 2012143089A JP 2011000178 A JP2011000178 A JP 2011000178A JP 2011000178 A JP2011000178 A JP 2011000178A JP 2012143089 A JP2012143089 A JP 2012143089A
- Authority
- JP
- Japan
- Prior art keywords
- conductor
- phase
- conductor portion
- winding
- slot
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Pending
Links
Images

















Landscapes
- Insulation, Fastening Of Motor, Generator Windings (AREA)
- Motor Or Generator Frames (AREA)
- Windings For Motors And Generators (AREA)
Abstract
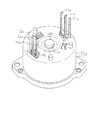
【解決手段】引出線L1u,L1v,L1w,L2u,L2v,L2wと接続されるステータ6に巻回されたSC巻線の各電力受電端子を、フロントカバー4側の密集するセグメントSGの溶接箇所を避けて、リアカバー壁3a側に配置する。そして、引出線L1u,L1v,L1w,L2u,L2v,L2wは、軸線方向に引き出されリアカバー壁3aに形成した第1及び第2貫通孔H1,H2を貫通してリアカバー壁3aに隣接する収容ボックス5内の制御回路の回路基板21に形成した各出力端子O1u,O1v,O1w,O2u,O2v,O2wに接続されるようにした。
【選択図】図1
Description
請求項5に記載の発明によれば、収容凹部に引出線を貫通させる貫通孔を形成したにので、引出線を貫通させるだけの最低限の大きさの孔でよく、モータケースと隣接する制御回路との間で、行き来する異物の相互間移動を抑制することができる。
請求項8に記載の発明は、2×p極(但し、pは極数対)の磁極が周方向に交互に配置されたコンシクエントロータと、前記磁極当たり複数個設けられる前記ロータと径方向に対向して2×p×m×n個(但し、mはステータ巻線の相数、nは自然数)のティース及びスロットを有するコアと前記スロットに巻回された多相の巻線とを有するステータと
を備えたブラシレスモータであって、前記セグメントに定形状のセグメントが挿入されてステータ巻線を構成し、前記セグメントの電力受電端子がそのまま軸線方向に延びる引出線となって、あるいは、軸線方向に延びる引出線に接続され、その引出線が前記ステータを内装する筒状ケースの開口部に配置されたカバーに形成された貫通孔から突出して前記カバーに隣接する制御回路の端子と接続するようにした。
図1に示すように、ブラシレスモータ1のモータケース2は、有底の筒状ハウジング3と、その筒状ハウジング3のフロント側の開口部を閉塞するフロントカバー4とで形成されている。また、筒状ハウジング3のリア側のリアカバー壁3aには、収容ボックス5が取着されている。

(第1系統3相巻線)
次に、第1系統3相巻線について説明する。
第1系統のU1相の巻線に使用されるスロットSは、表1に示すスロット番号のスロットSが割り当てられ、10個のセグメントSG1〜SG10が使用される。
体部ISiと外側導体OSの第1導体部OSiが配置され、スロット番号「12」のスロットSには、内側導体ISの第3導体部ISoと外側導体OSの第4導体部OSoが配置されている。
なお、説明の便宜上、スロット番号「60」及び「6」のスロットSに挿入される1個目のセグメントSG1に対して、隣接する2個目のセグメントSG2と10個目のセグメントSG10との間の溶接について説明する。
(中性点端子及び電力受電端子の設定)
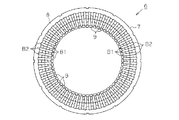
図6に示すように、本実施形態では、U1相の巻線について、1個目のセグメントSG1の外側導体OS及び内側導体ISのリアカバー壁3a側に位置する連結導体部OSc,IScを分離する。
また、図6に示すように、V1相の巻線について、スロット番号「56」及び「2」に挿入されたセグメントSGの外側導体OS及び内側導体ISの連結導体部OSc,IScを分離する。
また、図6に示すように、W1相の巻線について、スロット番号「52」及び「58」に挿入されたセグメントSGの外側導体OS及び内側導体ISの連結導体部OSc,IScを分離する。
これによって、各相の電力受電端子T1u,T1v,T1wは、スロットS内の径方向において3番目に外側の位置にそれぞれ配置され、各相の中性点端子T0u,T0v,T0wは、スロットS内の径方向において最も内側にそれぞれ配置される。しかも、各相の電力受電端子T1u,T1v,T1wは互いに短い位置に配置されている。同様に、各相の中性点端子T0u,T0v,T0wも、各相の電力受電端子T1u,T1v,T1wの内側であって互いに短い位置に配置されている。
(第2系統3相巻線)
次に、第2系統3相巻線について説明する。
第2系統のU2相の巻線に使用されるスロットSは、表1に示すスロット番号のスロットSが割り当てられ、10個のセグメントSG1a〜SG10aが使用される。
(中性点端子及び電力受電端子の設定)
図6、図7に示すように、本実施形態では、U2相の巻線について、中性点端子T0ua及び電力受電端子T2uは、U1相の中性点端子T0u及び電力受電端子T1uに対して周方向において180度相対向する位置に設けられる。従って、U2相の巻線について、5個目のセグメントSG5aの外側導体OS及び内側導体ISの連結導体部OSc,IScを分離する。
Z=2×5(マグネットMGの個数)×3(相数)×2=60個
となる。
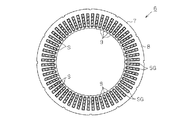
(1)本実施形態によれば、ステータ6のSC巻線の各電力受電端子T1u,T1v,T1w,T2u,T2v,T2wを、フロントカバー4側に設けたセグメントSGの先端部間の溶接部材B1,B2と反対側のリアカバー壁3a側に設けた。従って、各電力受電端子T1u,T1v,T1w,T2u,T2v,T2wは、フロントカバー4側の密集する溶接箇所を避けて、リアカバー壁3a側でそれぞれ各引出線L1u,L1v,L1w,L2u,L2v,L2wと接続でき、コギングトルクの小さなSC巻線からなるブラシレスモータ1の体格を小さくできる。
(4)本実施形態によれば、筒状ハウジング3のリアカバー壁3aの内側であって、中性線L1n,L2nと対峙した位置に、第1及び第2収容凹部18,19を形成し、その第1及び第2第1収容凹部18,19に、中性線L1n,L2nが介在するスペースを設けた。これによって、リアカバー壁3a側に張り出される中性線L1,L2nを、この第1及び第2収容凹部18,19により軸方向に吸収することができ、その分、モータの軸方向の体格を小さくできる。
・上記実施の形態では、第1及び第2収容凹部18,19の一部分の電力受電端子T1u,T1v,T1w,T2u,T2v,T2wと対峙した部分に、それぞれ第1及び第2貫通孔H1,H2を形成した。これを、リアカバー壁3aに第1及び第2収容凹部18,19を形成しない実施してもよい。
・上記実施の形態では、電力受電端子及び前記中性点端子を前記波巻用の外側導体OSの連結導体部OSc及び前記重ね巻用の内側導体ISの連結導体部IScでそれぞれ分離し、その一方を前記外側導体OSの前記第4導体部OSoに繋がる分離端と前記内側導体ISの前記第2導体部ISiに繋がる分離端とを電気的に接続するとともに、その他方を用いず、前記内側導体ISの分離した他方のものと同形態であって前記第3導体部ISoに繋がって軸方向に延びる引出し部を一体に形成した第1片側セグメントを用い、その引出し部を各相の前記電力受電端子T1u,T1v,T1w,T2u,T2v,T2wとし、前記外側導体OSの分離した他方のもとの同形態であって前記第1導体部OSiに繋がって軸方向に延びる引出し部を一体に形成した第2片側セグメントを用い、その引出し部を各相の前記中性点端子T0u,T0v,T0w,T0ua,T0va,T0waとしてもよい。
Claims (8)
- 筒状ケースのフロント側開口部にフロントカバーが取着され、筒状ケースのリア側開口部にリアカバーが取着されなるモータケースと、
前記モータケース内に配設され、回転軸の中心軸線に向かって延出形成されたてティースが径方向に等間隔に複数個配置され、ティースとティース間に形成される軸線方向に延びる各スロットに、U字状のセグメントが一方向から挿入され、各スロットから突出した先端間を周方向に繋げてなるSC巻線にて形成されたステータと、
を備えたモータであって、
前記ステータを、周方向に繋げたU字状のセグメントの先端間の溶接部がフロントカバーに、SC巻線の電力受電端子がリアカバーにそれぞれ対峙するように、モータケースに配設し、
前記SC巻線の電力受電端子をそのまま引出線としあるいは引出線を接続し、その引出線を軸方向に延出させてリアカバーに形成した貫通孔から突出させて前記リアカバーに隣接する制御回路の端子と接続するようにしたことを特徴とするモータ。 - 請求項1に記載のモータにおいて、
前記電力受電端子は、スロットS内の径方向において外側の位置にそれぞれ配置され、その電力受電端子に接続された前記引出線が軸線方向にリアカバーに形成した貫通孔を介して前記制御回路の端子と接続したことを特徴とするモータ。 - 請求項1又は2に記載のモータにおいて、
前記フロントカバー側に配置された前記ステータの周方向に繋げたU字状のセグメントの先端間の各溶接部は、軸方向の長さが同一であることを特徴とするモータ。 - 請求項1〜3のいずれか1項に記載のモータにおいて、
前記ステータに巻装したSC巻線は、各相の中性点端子を互いに接続する中性線を、リアカバーと対峙する位置に形成し、前記リアカバーには前記中性線あるいは中性線と前記中性点端子との結線部を逃がす収容凹部が形成されていることを特徴とするモータ。 - 請求項4に記載のモータにおいて、
前リアカバーに形成した収容凹部は、前記引出線を貫通させる前記貫通孔であることを特徴とするモータ。 - 請求項1〜5のいずれか1項に記載のモータにおいて、
前記SC巻線は、第1導体部と第4導体部を有し前記第1導体部と前記第4導体部が基端部で連結された波巻用の外側導体と、第2導体部と第3導体部を有し前記第2導体部と前記第3導体部が基端部で連結され前記波巻用の外側導体に内包される重ね巻用の内側導体とからなるセグメントを有し、前記第1導体部と前記第2導体部、及び、前記第3導体部と前記第4導体部をそれぞれの組とし、前記各組を互いに隣接する同相の各スロットにそれぞれ挿入し、前記各スロットに、前記第1導体部から第4導体部を径方向に内側から第1導体部、第2導体部、第3導体部、第4導体部の順で配置し、
隣接する一方のスロットの第1導体部の先端部と隣接する他方のスロットの第2導体部の先端部とを接続するとともに、隣接する一方のスロットの第3導体部の先端部と隣接する他方のスロットの第4導体部の先端部とを接続することによって、SC巻線よりなる3相Y結線巻線が2つ1スロットピッチずれて形成され、前記2つの3相Y結線巻線の各相の電力受電端子と中性点端子を、それぞれ同一の導体部から軸線方向に引き出したことを特徴とするモータ。 - 請求項6に記載のモータにおいて、
前記一方の3相Y結線巻線の各相の前記電力受電端子及び前記中性点端子は、
隣接する各相のセグメントについて、前記波巻用の外側導体の基端連結部分及び前記重ね巻用の内側導体の基端連結部分でそれぞれ分離し、その一方を前記外側導体の前記第4導体部に繋がる分離端と前記内側導体の前記第2導体部に繋がる分離端とを電気的に接続するとともに、その他方を用いず、前記内側導体の分離した他方のものと同形態であって前記第3導体部に繋がって軸方向に延びる引出し部を一体に形成した第1片側セグメントを用い、その引出し部を各相の前記電力受電端子とし、前記外側導体の分離した他方のもとの同形態であって前記第1導体部に繋がって軸方向に延びる引出し部を一体に形成した第2片側セグメントを用い、その引出し部を各相の前記中性点端子とし、
前記他方の3相Y結線巻線の各相の前記電力受電端子及び前記中性点端子は、
隣接する各相のセグメントについて、前記波巻用の外側導体の基端連結部分及び前記重ね巻用の内側導体の基端連結部分でそれぞれ分離し、その一方を前記外側導体の前記第4導体部に繋がる分離端と前記内側導体の前記第2導体部に繋がる分離端とを電気的に接続するとともに、その他方を用いず、前記内側導体の分離した他方のものと同形態であって前記第3導体部に繋がって軸方向に延びる引出し部を一体に形成した第1片側セグメントを用い、その引出し部を各相の前記電力受電端子とし、前記外側導体の分離した他方のもとの同形態であって前記第1導体部に繋がって軸方向に延びる引出し部を一体に形成した第2片側セグメントを用い、その引出し部を各相の前記中性点端子としたことを特徴とするモータ。 - 2×p極(但し、pは極数対)の磁極が周方向に交互に配置されたコンシクエントロータと、
前記磁極当たり複数個設けられる前記ロータと径方向に対向して2×p×m×n個(但し、mはステータ巻線の相数、nは自然数)のティース及びスロットを有するコアと前記スロットに巻回された多相の巻線とを有するステータと
を備えたブラシレスモータであって、
前記セグメントに定形状のセグメントが挿入されてステータ巻線を構成し、
前記セグメントの電力受電端子がそのまま軸線方向に延びる引出線となって、あるいは、軸線方向に延びる引出線に接続され、その引出線が前記ステータを内装する筒状ケースの開口部に配置されたカバーに形成された貫通孔から突出して前記カバーに隣接する制御回路の端子と接続するようにしたことを特徴とするモータ。
Priority Applications (3)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2011000178A JP2012143089A (ja) | 2011-01-04 | 2011-01-04 | モータ |
| US13/335,000 US8916999B2 (en) | 2011-01-01 | 2011-12-22 | Motors containing segment conductor coils |
| CN201110462000.XA CN102593976B (zh) | 2011-01-04 | 2011-12-29 | 电动机 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2011000178A JP2012143089A (ja) | 2011-01-04 | 2011-01-04 | モータ |
Publications (1)
| Publication Number | Publication Date |
|---|---|
| JP2012143089A true JP2012143089A (ja) | 2012-07-26 |
Family
ID=46678800
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2011000178A Pending JP2012143089A (ja) | 2011-01-01 | 2011-01-04 | モータ |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP2012143089A (ja) |
Cited By (7)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2014064420A (ja) * | 2012-09-24 | 2014-04-10 | Hitachi Industrial Equipment Systems Co Ltd | 回転電機 |
| JP2014107973A (ja) * | 2012-11-28 | 2014-06-09 | Denso Corp | 回転電機 |
| JP2015201920A (ja) * | 2014-04-04 | 2015-11-12 | アスモ株式会社 | モータ |
| JP2016013000A (ja) * | 2014-06-30 | 2016-01-21 | 日本精工株式会社 | モータ並びにそれを搭載した電動パワーステアリング装置及び車両 |
| JP2016101035A (ja) * | 2014-11-25 | 2016-05-30 | 日本電産株式会社 | モータ |
| JP2019176589A (ja) * | 2018-03-28 | 2019-10-10 | 本田技研工業株式会社 | 巻きコイル、回転電機用のコイル、回転電機、巻きコイルの製造方法及び装置 |
| EP3678282A1 (en) * | 2019-01-02 | 2020-07-08 | Lg Electronics Inc. | Stator of electric rotating machine, hairpin of stator of electric rotating machine and manufacturing method thereof |
Citations (6)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2002058189A (ja) * | 2000-08-10 | 2002-02-22 | Mitsubishi Electric Corp | 回転電機 |
| JP2002078261A (ja) * | 2000-08-25 | 2002-03-15 | Denso Corp | 車両用交流発電機 |
| JP2005269875A (ja) * | 2004-03-22 | 2005-09-29 | Asmo Co Ltd | 電動機 |
| JP2007228756A (ja) * | 2006-02-24 | 2007-09-06 | Denso Corp | 車両用交流発電機の固定子 |
| JP2008211945A (ja) * | 2007-02-28 | 2008-09-11 | Hitachi Ltd | 車両駆動装置 |
| JP2010263763A (ja) * | 2008-12-17 | 2010-11-18 | Asmo Co Ltd | ブラシレスモータ |
-
2011
- 2011-01-04 JP JP2011000178A patent/JP2012143089A/ja active Pending
Patent Citations (6)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2002058189A (ja) * | 2000-08-10 | 2002-02-22 | Mitsubishi Electric Corp | 回転電機 |
| JP2002078261A (ja) * | 2000-08-25 | 2002-03-15 | Denso Corp | 車両用交流発電機 |
| JP2005269875A (ja) * | 2004-03-22 | 2005-09-29 | Asmo Co Ltd | 電動機 |
| JP2007228756A (ja) * | 2006-02-24 | 2007-09-06 | Denso Corp | 車両用交流発電機の固定子 |
| JP2008211945A (ja) * | 2007-02-28 | 2008-09-11 | Hitachi Ltd | 車両駆動装置 |
| JP2010263763A (ja) * | 2008-12-17 | 2010-11-18 | Asmo Co Ltd | ブラシレスモータ |
Cited By (10)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2014064420A (ja) * | 2012-09-24 | 2014-04-10 | Hitachi Industrial Equipment Systems Co Ltd | 回転電機 |
| JP2014107973A (ja) * | 2012-11-28 | 2014-06-09 | Denso Corp | 回転電機 |
| JP2015201920A (ja) * | 2014-04-04 | 2015-11-12 | アスモ株式会社 | モータ |
| JP2016013000A (ja) * | 2014-06-30 | 2016-01-21 | 日本精工株式会社 | モータ並びにそれを搭載した電動パワーステアリング装置及び車両 |
| EP3163720A4 (en) * | 2014-06-30 | 2018-05-23 | NSK Ltd. | Motor, and electric power steering device and vehicle in which said motor is installed |
| US10218241B2 (en) | 2014-06-30 | 2019-02-26 | Nsk Ltd. | Motor, and electric power steering apparatus and vehicle equipped with the same |
| JP2016101035A (ja) * | 2014-11-25 | 2016-05-30 | 日本電産株式会社 | モータ |
| JP2019176589A (ja) * | 2018-03-28 | 2019-10-10 | 本田技研工業株式会社 | 巻きコイル、回転電機用のコイル、回転電機、巻きコイルの製造方法及び装置 |
| EP3678282A1 (en) * | 2019-01-02 | 2020-07-08 | Lg Electronics Inc. | Stator of electric rotating machine, hairpin of stator of electric rotating machine and manufacturing method thereof |
| US11557935B2 (en) | 2019-01-02 | 2023-01-17 | Lg Magna E-Powertrain Co., Ltd. | Stator of electric rotating machine, hairpin of stator of electric rotating machine and manufacturing method thereof |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP6068953B2 (ja) | 電動モータ | |
| JP5040303B2 (ja) | 回転電機 | |
| JP2012157236A (ja) | ブラシレスモータ及びブラシレスモータの駆動方法 | |
| JP5758718B2 (ja) | ステータ、モータ、導体の製造方法、ステータの製造方法 | |
| JP2012143089A (ja) | モータ | |
| JP5070248B2 (ja) | 回転電機とその製造方法 | |
| JP2018198482A (ja) | 回転電機 | |
| EP3346586A1 (en) | Stator coil, stator equipped with same, and rotary electric machine equipped with this stator | |
| JP2008211880A (ja) | 回転電機及び固定子の製造方法 | |
| CN110771013B (zh) | 旋转电机的定子以及旋转电机 | |
| CN109478814B (zh) | 旋转电机的定子和旋转电机 | |
| EP3352340A1 (en) | Stator coil, method for manufacturing stator, and dynamo-electric machine | |
| JPWO2013145977A1 (ja) | 回転電機 | |
| CN110086280B (zh) | 定子及具备该定子的旋转电机 | |
| JP5700643B2 (ja) | ブラシレスモータ及びブラシレスモータの駆動方法 | |
| JP2019017211A (ja) | ブラシレスモータ及び電動パワーステアリング装置 | |
| JP2012143087A (ja) | モータ | |
| JP2014103834A (ja) | 回転電機のステータ | |
| JPH08182236A (ja) | 回転電機の電機子コイル巻回方法 | |
| JP2021052536A (ja) | ステータ | |
| JP2012235671A (ja) | モータ | |
| JP2013247715A (ja) | ステータ及びモータ | |
| CN110741537B (zh) | 旋转电机 | |
| JP6926893B2 (ja) | 回転電機 | |
| JP2014192997A (ja) | 電動モータ |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20130925 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20140722 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20140724 |
|
| A521 | Written amendment |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20140903 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20150310 |
|
| A02 | Decision of refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A02 Effective date: 20150701 |