JP2012115553A - 術具及びその術具を有する手術支援システム - Google Patents
術具及びその術具を有する手術支援システム Download PDFInfo
- Publication number
- JP2012115553A JP2012115553A JP2010269301A JP2010269301A JP2012115553A JP 2012115553 A JP2012115553 A JP 2012115553A JP 2010269301 A JP2010269301 A JP 2010269301A JP 2010269301 A JP2010269301 A JP 2010269301A JP 2012115553 A JP2012115553 A JP 2012115553A
- Authority
- JP
- Japan
- Prior art keywords
- surgical instrument
- unit
- distal end
- drive
- tip
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Granted
Links
- 238000001356 surgical procedure Methods 0.000 title claims abstract description 10
- 230000007246 mechanism Effects 0.000 claims abstract description 42
- 230000033001 locomotion Effects 0.000 claims description 20
- 238000001514 detection method Methods 0.000 claims description 16
- 238000005259 measurement Methods 0.000 claims description 8
- 239000004615 ingredient Substances 0.000 claims 1
- 230000005540 biological transmission Effects 0.000 description 43
- 238000000034 method Methods 0.000 description 11
- 238000012545 processing Methods 0.000 description 9
- 230000008569 process Effects 0.000 description 5
- 230000004048 modification Effects 0.000 description 4
- 238000012986 modification Methods 0.000 description 4
- 238000010586 diagram Methods 0.000 description 3
- 230000000694 effects Effects 0.000 description 2
- 230000006870 function Effects 0.000 description 2
- 238000004458 analytical method Methods 0.000 description 1
- 230000008859 change Effects 0.000 description 1
- 239000000470 constituent Substances 0.000 description 1
- 230000000994 depressogenic effect Effects 0.000 description 1
- 230000006866 deterioration Effects 0.000 description 1
- 239000004973 liquid crystal related substance Substances 0.000 description 1
- 230000007257 malfunction Effects 0.000 description 1
- 238000011160 research Methods 0.000 description 1
- 230000002269 spontaneous effect Effects 0.000 description 1
- 230000001954 sterilising effect Effects 0.000 description 1
- 238000004659 sterilization and disinfection Methods 0.000 description 1
Images








Classifications
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B34/00—Computer-aided surgery; Manipulators or robots specially adapted for use in surgery
- A61B34/30—Surgical robots
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B34/00—Computer-aided surgery; Manipulators or robots specially adapted for use in surgery
- A61B34/30—Surgical robots
- A61B34/37—Master-slave robots
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B90/00—Instruments, implements or accessories specially adapted for surgery or diagnosis and not covered by any of the groups A61B1/00 - A61B50/00, e.g. for luxation treatment or for protecting wound edges
- A61B90/08—Accessories or related features not otherwise provided for
- A61B2090/0803—Counting the number of times an instrument is used
Landscapes
- Health & Medical Sciences (AREA)
- Engineering & Computer Science (AREA)
- Life Sciences & Earth Sciences (AREA)
- Surgery (AREA)
- Robotics (AREA)
- Medical Informatics (AREA)
- Biomedical Technology (AREA)
- Heart & Thoracic Surgery (AREA)
- Nuclear Medicine, Radiotherapy & Molecular Imaging (AREA)
- Molecular Biology (AREA)
- Animal Behavior & Ethology (AREA)
- General Health & Medical Sciences (AREA)
- Public Health (AREA)
- Veterinary Medicine (AREA)
- Manipulator (AREA)
- Endoscopes (AREA)
Abstract
【解決手段】術具先端部200の内部に、術具先端部200が位置決めアーム部100に装着されたときに通電されるタイマ201を設ける。このタイマ201は、位置決めアーム部100によって通電されたときに術具先端部200の使用時間又は動作回数をカウントする。タイマ201のカウントの結果、術具先端部200が寿命に達した場合にはロック機構201aが動作して術具の動作がロックされる。
【選択図】図2
Description
[第1の実施形態]
図1は、本発明の各実施形態に係る手術支援システムの一例としてのマスタスレーブマニピュレータの全体構成を示す図である。図1に示すように、本実施形態に係るマスタスレーブマニピュレータは、遠隔操作装置10と、制御装置20と、スレーブマニピュレータ30と、を有している。
操作部11は、例えば複数の駆動軸やグリッパー部を有している。操作者1が、操作部11を操作することにより、操作部11を構成する各駆動軸が駆動される。各駆動軸の駆動量は、各駆動軸に設けられた図示しない位置検出器(例えばエンコーダ)によって検出され、各位置検出器の検出信号が、スレーブマニピュレータ30のスレーブアーム31の手先の位置・姿勢を指令するための、操作部11の操作情報を示す信号(操作信号)として制御装置20に出力される。
マスタ制御部21は、遠隔操作装置10からの操作信号に従って、スレーブアーム31の手先の位置・姿勢の指令値を算出し、この位置・姿勢の指令値を、後述する駆動量検出部において検出された検出値とともにマニピュレータ制御部22に出力する。
画像処理部23は、スレーブアーム31の先端に設けられた電子カメラ(電子内視鏡等)から得られた画像信号を処理し、表示部12の表示用の画像信号を生成して表示部12に出力する。
位置決めアーム部100の先端には、術具先端部200を装着するための着脱部が形成されている。この着脱部には、術具先端部200を駆動するための駆動部である駆動機構101と、術具先端部200内に設けられているタイマ201に電力を供給するための電力供給部111とが設けられている。
使用状況計測部の一例としてのタイマ201は、電力供給部111からの電力供給を受けてカウントダウン動作するタイマである。このタイマ201がカウントする時間は、術具先端部200の使用可能時間(寿命)に対応している。なお、タイマ201は、ぜんまい等の機械機構によってカウントを行うアナログ式のタイマであっても良いし、デジタルカウンタのようなデジタル式のタイマであっても良い。また、図2に示すように、本実施形態のタイマ201には、ロック機構201aが設けられている。ロック機構201aは、タイマ201のカウントが「0」、即ち術具先端部200の寿命がなくなったときに作動して動力伝達部202の動作をロックする。ロック機構201aは、係止部材等を用いて機械的に動力伝達部202の動作をロックするものであっても良いし、リレー等を用いて電気的に動力伝達部202の動作をロックするものであっても良い。例えば、図4は、動力部の動作を機械的にロックする例を示している。
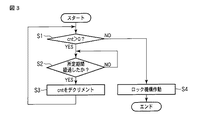
ここで、図3で示した動作にはカウントcntが0を超えているか否かの判定が含まれている。ぜんまい等の機械機構によってカウントを行うアナログ式のタイマの場合にはこのような判定は行われずにカウントcntが0となったときにステップS4のロック動作が行われる。
図5は、マニピュレータ制御部22の動作を示したフローチャートである。マニピュレータ制御部22は、操作者1による操作部11の操作に従った指令値がマスタ制御部21から入力されたか否かを判定している(ステップS11)。ステップS11の判定において、指令値が入力されていない場合に、マニピュレータ制御部22は、指令値が入力されるまで、ステップS11の判定を行いつつ待機する。ステップS11の判定において、指令値が入力された場合に、マニピュレータ制御部22は、入力された指定値に従って位置決めアーム部100の各関節を駆動するための動力部102の目標の駆動量を、例えば逆運動学計算によって算出する(ステップS12)。なお、逆運動学計算については、例えば解析的な手法等の従来周知の各種の手法を用いることができる。ここでは、その詳細についての説明は省略する。
次に、本発明の第2の実施形態について説明する。上述の第1の実施形態は、術具先端部200が位置決めアーム部100に装着されている時間を術具先端部200の寿命として計測するようにしている。これに対し、第2の実施形態は、術具先端部200が実際に使用された(動作した)回数又は時間を術具先端部200の寿命として計測する例である。
また、上述の例では、カウンタIC201によって計測を行うようにしているが、第1の実施形態と同様に、機械式のカウンタを用いて計測を行うようにしても良い。
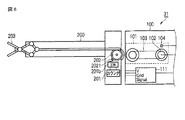
例えば、上述した第1及び第2の実施形態では、位置決めアーム部100の駆動機構が回転動力によって術具先端部200を駆動する例を示している。しかしながら、位置決めアーム部100内部の構成は特に限定されるものではなく、例えば、位置決めアーム部100の駆動機構が直動動力によって術具先端部200を駆動するものであっても良い。図8は、位置決めアーム部100の駆動機構が直動機構を有する場合の第2の実施形態の構成の適用例である。図8に示す駆動機構1011は、ラックアンドピニオンあるいはボールねじ等を有して構成され、動力部を構成するモータの回転動力を直動運動に変換する。このような直動運動に従って、術具先端部200の動力伝達部202を構成するロッド2022も直動運動する。ロッド2022には第2の実施形態で説明したのと同様の突出部2022aが設けられており、また、突出部2022aの近傍には第2の実施形態で説明したのと同様のSW201b及びカウンタIC201が設けられている。このような構成において、ロッド2022の直動運動により、突出部2022aがSW201bに接触する毎にSW201bがオンすることでカウンタIC201によるカウントアップ動作が行われる。このようにして、第2の実施形態と同様に寿命の計測を行うことが可能である。ここで、図8は、位置決めアーム部100の駆動機構が直動機構を有する場合の第2の実施形態の構成の適用例を示しているが、第1の実施形態の構成を適用するようにしても良い。
また、術具先端部200と位置決めアーム部100との間に駆動力を伝達可能なアダプタを介しても良い。
さらに、上述した各実施形態では、術具先端部200が位置決めアーム部100に着脱される位置を、先端を例にとって説明したが、特に先端に限るものではなく、術具先端部200が着脱される位置であれば、どの位置でも良い。
また、上述した各実施形態では、術具先端部200が位置決めアーム部100によって通電された際に術具先端部200の寿命のカウントを行うようにしている。これに対し、位置決めアーム部100の装着を機械的に検出しつつ、術具先端部200の寿命がきたときに術具先端部200の動作を自動的にロックさせるようにしても良い。図10は、このような変形例の構成を示した図である。動作については、上述した図5のフローチャートにおける動作と同じのため、その説明は省略する。なお、図10は、位置決めアーム部100の駆動機構が直動機構の例を示しているが、駆動機構は必ずしも直動機構とする必要はない。
図10に示す駆動機構1011の動力伝達部103は、ラックアンドピニオンあるいはボールねじ等を有して構成され、動力部102を構成するモータの回転動力を直動運動に変換する。この動力伝達部103の先端には係合突起103aが形成されている。この係合突起103aは、位置決めアーム部100に術具先端部200が装着された際に、図10(b)に示すようにして術具先端部200のロッド2022と係合するように構成されている。このような構成により、動力伝達部103の直動運動に応じてロッド2022も直動運動する。
また、図10に示すように、位置決めアーム部100の術具先端部200との対向面には押圧突起100aが形成されている。この押圧突起100aは、位置決めアーム部100に術具先端部200が装着された際に、図10(b)に示すようにして術具先端部200の可動部2023aと当接して可動部2023aを回動可能とするように構成されている。
つまり、図10(a)に示すように、可動部2023aが術具先端部200の位置決めアーム部100との対向面からぜんまい式ギヤ2023の下方にかけて形成されている。この可動部2023aは、位置決めアーム部100に術具先端部200が装着されていない場合には、図10(a)に示すようにしてぜんまい式ギヤ2023を係止している。一方、位置決めアーム部100に術具先端部200が装着された際には、可動部2023aは、図10(b)に示すようにして回動してぜんまい式ギヤの係止を解除する。また、可動部2023aの下方にはばね2023bが設けられている。このばね2023bは、位置決めアーム部100から術具先端部200が外された場合に、可動部2023aを図10(a)の状態に復帰させるために設けられている。
ただし、ぜんまい式ギヤ2023は、可動部2023aによる係止が解除されても、図示されていない突起により、ぜんまいバネによる回転力は開放されず、図上反時計まわりには回転可能だが、時計回りには回転しないように保持されており、反時計まわりに回転することで、ぜんまいバネに力が蓄えられる構造になっている。
また、術具先端部200のロッド2022には、突起2022bが形成されている。この突起2022bは、ロッド2022が図面左方向に動いた場合にのみぜんまい式ギヤ2023と噛み合い、ロッド2022が図面右方向に動いた場合にはぜんまい式ギヤ2023と噛み合わないように構成されている。なお、ロッド2022は、図10では省略しているが、図8のロッド2022や図9のように術具先端の開閉部や関節などを駆動する駆動ロッドである。
図10に示すような構成において、位置決めアーム部100に術具先端部200が装着されると、可動部2023aが回動してぜんまいギヤ2023が可動な状態となる。この状態でロッド2022が直動運動すると、ぜんまいギヤ2023が回転してぜんまいに力が蓄えられる。したがって、術具先端部200が動くほど、ぜんまいに力が蓄えられる。これにより、術具先端部200の動作回数が規定回数を超え、ぜんまいに蓄えられた力が駆動部102の駆動力を上回った時点で、それ以上術具先端部200が駆動できなくなる(術具先端部200の動作がロックされる)。この時点が術具先端部200の寿命となる。ぜんまいバネの強さを変えることで、術具毎に使用時間を設定することができる。このような構成を用いても第1の実施形態と同様の効果を得ることが可能である。
つまり、術具に電力を供給しなくても術具の実際の使用時間を計測し、設定した使用時間に達したら術具を動かなくなるようにすることが可能であり、術具の総動作量をIC等を用いずに保持可能である。
上記各実施形態(変形例を含む)では、術具として術具先端部200を駆動するための駆動機構101、1011、101a、101bを術具先端部200が着脱される位置決めアーム部100に設けたものを例にとって説明したが、次に示す術具であっても良い。
術具が、術具先端部200と、術具先端部200を操作するための操作部とを有し、術具先端部200は操作部に着脱自在となっており、駆動部としての駆動機構101、1011、101a、101bを位置決めアーム部100ではなく、操作部に設けたもの。
また、術具が、術具先端部200と前記操作部とが一体となったものであっても良い。
上記各術具において、駆動部としての駆動機構が、上記したような電気的な機構でなく、機械的な機構からなっていても良い。
また、上記各実施形態(変形例を含む)では、手術支援システムとして、術具先端部200と、術具先端部200が着脱される位置決めアーム部100とを有するものを例にとって説明したが、これに限るものではなく、上記した術具先端部200と駆動機構101、1011、101a、101bが設けられた操作部とが一体となった術具を、駆動部のない位置決めアーム部100に取り付ける手術支援システムであっても良い。
Claims (7)
- 術具であって、
前記術具の内部に設けられ、前記術具の使用又は動作されたときに連動して術具の使用時間又は動作量を取得可能な使用状況計測部を有することを特徴とする術具。 - 前記術具は、開閉部又は関節部を有し、
前記使用状況計測部が取得する使用時間又は動作量として、前記開閉部又は前記関節部の動きとすることを特徴とする請求項1に記載の術具。 - 前記使用状況計測部が取得する前記使用時間又は前記動作量が規定値を越えたときに、前記術具の動作をロックする機構を具備することを特徴とする請求項1又は2に記載の術具。
- 前記術具は、術具先端部とこの術具先端部を駆動するための駆動部とを有し、
前記術具先端部と前記駆動部とは着脱自在で、
前記使用状況計測部は、前記術具先端部の内部に設けられ、前記駆動部と独立で前記使用時間又は前記動作量が保存されていることを特徴とする請求項1乃至請求項3の何れか1項に記載の術具。 - 請求項1乃至請求項3の何れか1項に記載の術具と、
前記術具が取り付けられるアーム部と、を有することを特徴とする手術支援システム。 - 請求項4に記載の術具先端部と、
前記術具先端部が着脱され、請求項4に記載の駆動部が設けられたアーム部と、を有することを特徴とする手術支援システム。 - 前記駆動部は、前記術具を駆動するための動力を発生する動力部を有し、
前記動力部の目標の駆動量を算出し、該算出した目標の駆動量に従って前記動力部を駆動させる制御部と、
前記動力部の実際の駆動量を検出する駆動量検出部と、をさらに有し、
前記制御部は、前記算出した目標の駆動量と前記動力部の実際の駆動量との差から、前記術具の動作がロックされているか否かを判定し、該判定の結果、前記術具の動作がロックされている場合には、前記術具の交換を促す旨の警告をすることを特徴とする請求項6に記載の手術支援システム。
Priority Applications (5)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2010269301A JP5734631B2 (ja) | 2010-12-02 | 2010-12-02 | 手術支援システム |
| EP11844452.0A EP2623063B1 (en) | 2010-12-02 | 2011-11-28 | Surgical instrument and surgery support system having said surgical instrument |
| PCT/JP2011/077302 WO2012073849A1 (ja) | 2010-12-02 | 2011-11-28 | 術具及びその術具を有する手術支援システム |
| CN201180057298.4A CN103228226B (zh) | 2010-12-02 | 2011-11-28 | 手术器械以及具有该手术器械的手术辅助系统 |
| US13/308,718 US20120143211A1 (en) | 2010-12-02 | 2011-12-01 | Surgical instrument and operation support system having the surgical instrument |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2010269301A JP5734631B2 (ja) | 2010-12-02 | 2010-12-02 | 手術支援システム |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2012115553A true JP2012115553A (ja) | 2012-06-21 |
| JP5734631B2 JP5734631B2 (ja) | 2015-06-17 |
Family
ID=46162923
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2010269301A Active JP5734631B2 (ja) | 2010-12-02 | 2010-12-02 | 手術支援システム |
Country Status (5)
| Country | Link |
|---|---|
| US (1) | US20120143211A1 (ja) |
| EP (1) | EP2623063B1 (ja) |
| JP (1) | JP5734631B2 (ja) |
| CN (1) | CN103228226B (ja) |
| WO (1) | WO2012073849A1 (ja) |
Cited By (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| KR101366794B1 (ko) | 2012-06-27 | 2014-02-26 | 한국과학기술원 | 유연한 수술도구용 경도조절장치 |
| WO2015012023A1 (ja) * | 2013-07-24 | 2015-01-29 | オリンパス株式会社 | 医療用マニピュレータ |
| US10881475B2 (en) | 2015-07-09 | 2021-01-05 | Kawasaki Jukogyo Kabushiki Kaisha | Surgical robot |
| JP2022002787A (ja) * | 2017-08-10 | 2022-01-11 | インテュイティブ サージカル オペレーションズ, インコーポレイテッド | 遠隔手術システムでの器具の使用可能寿命の延長 |
Families Citing this family (148)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US11229472B2 (en) | 2001-06-12 | 2022-01-25 | Cilag Gmbh International | Modular battery powered handheld surgical instrument with multiple magnetic position sensors |
| US8182501B2 (en) | 2004-02-27 | 2012-05-22 | Ethicon Endo-Surgery, Inc. | Ultrasonic surgical shears and method for sealing a blood vessel using same |
| AU2005295010B2 (en) | 2004-10-08 | 2012-05-31 | Ethicon Endo-Surgery, Inc. | Ultrasonic surgical instrument |
| ES2717309T3 (es) | 2004-10-08 | 2019-06-20 | Covidien Lp | Aplicador endoscópico de grapas quirúrgicas |
| US20070191713A1 (en) | 2005-10-14 | 2007-08-16 | Eichmann Stephen E | Ultrasonic device for cutting and coagulating |
| US7621930B2 (en) | 2006-01-20 | 2009-11-24 | Ethicon Endo-Surgery, Inc. | Ultrasound medical instrument having a medical ultrasonic blade |
| US8057498B2 (en) | 2007-11-30 | 2011-11-15 | Ethicon Endo-Surgery, Inc. | Ultrasonic surgical instrument blades |
| US8911460B2 (en) | 2007-03-22 | 2014-12-16 | Ethicon Endo-Surgery, Inc. | Ultrasonic surgical instruments |
| US8226675B2 (en) | 2007-03-22 | 2012-07-24 | Ethicon Endo-Surgery, Inc. | Surgical instruments |
| US8142461B2 (en) | 2007-03-22 | 2012-03-27 | Ethicon Endo-Surgery, Inc. | Surgical instruments |
| US8882791B2 (en) | 2007-07-27 | 2014-11-11 | Ethicon Endo-Surgery, Inc. | Ultrasonic surgical instruments |
| US8808319B2 (en) | 2007-07-27 | 2014-08-19 | Ethicon Endo-Surgery, Inc. | Surgical instruments |
| US8523889B2 (en) | 2007-07-27 | 2013-09-03 | Ethicon Endo-Surgery, Inc. | Ultrasonic end effectors with increased active length |
| US8512365B2 (en) | 2007-07-31 | 2013-08-20 | Ethicon Endo-Surgery, Inc. | Surgical instruments |
| US9044261B2 (en) | 2007-07-31 | 2015-06-02 | Ethicon Endo-Surgery, Inc. | Temperature controlled ultrasonic surgical instruments |
| US8430898B2 (en) | 2007-07-31 | 2013-04-30 | Ethicon Endo-Surgery, Inc. | Ultrasonic surgical instruments |
| JP2010540186A (ja) | 2007-10-05 | 2010-12-24 | エシコン・エンド−サージェリィ・インコーポレイテッド | 人間工学的外科用器具 |
| US10010339B2 (en) | 2007-11-30 | 2018-07-03 | Ethicon Llc | Ultrasonic surgical blades |
| US8058771B2 (en) | 2008-08-06 | 2011-11-15 | Ethicon Endo-Surgery, Inc. | Ultrasonic device for cutting and coagulating with stepped output |
| US9089360B2 (en) | 2008-08-06 | 2015-07-28 | Ethicon Endo-Surgery, Inc. | Devices and techniques for cutting and coagulating tissue |
| US9700339B2 (en) | 2009-05-20 | 2017-07-11 | Ethicon Endo-Surgery, Inc. | Coupling arrangements and methods for attaching tools to ultrasonic surgical instruments |
| US8650728B2 (en) | 2009-06-24 | 2014-02-18 | Ethicon Endo-Surgery, Inc. | Method of assembling a transducer for a surgical instrument |
| US8663220B2 (en) | 2009-07-15 | 2014-03-04 | Ethicon Endo-Surgery, Inc. | Ultrasonic surgical instruments |
| US11090104B2 (en) | 2009-10-09 | 2021-08-17 | Cilag Gmbh International | Surgical generator for ultrasonic and electrosurgical devices |
| US9168054B2 (en) | 2009-10-09 | 2015-10-27 | Ethicon Endo-Surgery, Inc. | Surgical generator for ultrasonic and electrosurgical devices |
| US10441345B2 (en) | 2009-10-09 | 2019-10-15 | Ethicon Llc | Surgical generator for ultrasonic and electrosurgical devices |
| US8956349B2 (en) | 2009-10-09 | 2015-02-17 | Ethicon Endo-Surgery, Inc. | Surgical generator for ultrasonic and electrosurgical devices |
| USRE47996E1 (en) | 2009-10-09 | 2020-05-19 | Ethicon Llc | Surgical generator for ultrasonic and electrosurgical devices |
| US8951272B2 (en) | 2010-02-11 | 2015-02-10 | Ethicon Endo-Surgery, Inc. | Seal arrangements for ultrasonically powered surgical instruments |
| US8579928B2 (en) | 2010-02-11 | 2013-11-12 | Ethicon Endo-Surgery, Inc. | Outer sheath and blade arrangements for ultrasonic surgical instruments |
| US8486096B2 (en) | 2010-02-11 | 2013-07-16 | Ethicon Endo-Surgery, Inc. | Dual purpose surgical instrument for cutting and coagulating tissue |
| US8469981B2 (en) | 2010-02-11 | 2013-06-25 | Ethicon Endo-Surgery, Inc. | Rotatable cutting implement arrangements for ultrasonic surgical instruments |
| US8961547B2 (en) | 2010-02-11 | 2015-02-24 | Ethicon Endo-Surgery, Inc. | Ultrasonic surgical instruments with moving cutting implement |
| GB2480498A (en) | 2010-05-21 | 2011-11-23 | Ethicon Endo Surgery Inc | Medical device comprising RF circuitry |
| US8795327B2 (en) | 2010-07-22 | 2014-08-05 | Ethicon Endo-Surgery, Inc. | Electrosurgical instrument with separate closure and cutting members |
| US9192431B2 (en) | 2010-07-23 | 2015-11-24 | Ethicon Endo-Surgery, Inc. | Electrosurgical cutting and sealing instrument |
| US9259265B2 (en) | 2011-07-22 | 2016-02-16 | Ethicon Endo-Surgery, Llc | Surgical instruments for tensioning tissue |
| WO2013119545A1 (en) | 2012-02-10 | 2013-08-15 | Ethicon-Endo Surgery, Inc. | Robotically controlled surgical instrument |
| US9226766B2 (en) | 2012-04-09 | 2016-01-05 | Ethicon Endo-Surgery, Inc. | Serial communication protocol for medical device |
| US9237921B2 (en) | 2012-04-09 | 2016-01-19 | Ethicon Endo-Surgery, Inc. | Devices and techniques for cutting and coagulating tissue |
| US9724118B2 (en) | 2012-04-09 | 2017-08-08 | Ethicon Endo-Surgery, Llc | Techniques for cutting and coagulating tissue for ultrasonic surgical instruments |
| US9241731B2 (en) | 2012-04-09 | 2016-01-26 | Ethicon Endo-Surgery, Inc. | Rotatable electrical connection for ultrasonic surgical instruments |
| US9439668B2 (en) | 2012-04-09 | 2016-09-13 | Ethicon Endo-Surgery, Llc | Switch arrangements for ultrasonic surgical instruments |
| US20140005705A1 (en) | 2012-06-29 | 2014-01-02 | Ethicon Endo-Surgery, Inc. | Surgical instruments with articulating shafts |
| US9226767B2 (en) | 2012-06-29 | 2016-01-05 | Ethicon Endo-Surgery, Inc. | Closed feedback control for electrosurgical device |
| US9393037B2 (en) | 2012-06-29 | 2016-07-19 | Ethicon Endo-Surgery, Llc | Surgical instruments with articulating shafts |
| US9198714B2 (en) | 2012-06-29 | 2015-12-01 | Ethicon Endo-Surgery, Inc. | Haptic feedback devices for surgical robot |
| US9820768B2 (en) | 2012-06-29 | 2017-11-21 | Ethicon Llc | Ultrasonic surgical instruments with control mechanisms |
| US9326788B2 (en) | 2012-06-29 | 2016-05-03 | Ethicon Endo-Surgery, Llc | Lockout mechanism for use with robotic electrosurgical device |
| US9351754B2 (en) | 2012-06-29 | 2016-05-31 | Ethicon Endo-Surgery, Llc | Ultrasonic surgical instruments with distally positioned jaw assemblies |
| US20140005702A1 (en) | 2012-06-29 | 2014-01-02 | Ethicon Endo-Surgery, Inc. | Ultrasonic surgical instruments with distally positioned transducers |
| US9283045B2 (en) | 2012-06-29 | 2016-03-15 | Ethicon Endo-Surgery, Llc | Surgical instruments with fluid management system |
| US9408622B2 (en) | 2012-06-29 | 2016-08-09 | Ethicon Endo-Surgery, Llc | Surgical instruments with articulating shafts |
| JP6042652B2 (ja) * | 2012-07-30 | 2016-12-14 | オリンパス株式会社 | 術具及び医療用マニピュレータ |
| JP6275727B2 (ja) | 2012-09-28 | 2018-02-07 | エシコン・エンド−サージェリィ・インコーポレイテッドEthicon Endo−Surgery,Inc. | 多機能バイポーラ鉗子 |
| US10201365B2 (en) | 2012-10-22 | 2019-02-12 | Ethicon Llc | Surgeon feedback sensing and display methods |
| US9095367B2 (en) | 2012-10-22 | 2015-08-04 | Ethicon Endo-Surgery, Inc. | Flexible harmonic waveguides/blades for surgical instruments |
| US20140135804A1 (en) | 2012-11-15 | 2014-05-15 | Ethicon Endo-Surgery, Inc. | Ultrasonic and electrosurgical devices |
| US10226273B2 (en) | 2013-03-14 | 2019-03-12 | Ethicon Llc | Mechanical fasteners for use with surgical energy devices |
| US9241728B2 (en) | 2013-03-15 | 2016-01-26 | Ethicon Endo-Surgery, Inc. | Surgical instrument with multiple clamping mechanisms |
| US9814514B2 (en) | 2013-09-13 | 2017-11-14 | Ethicon Llc | Electrosurgical (RF) medical instruments for cutting and coagulating tissue |
| US9265926B2 (en) | 2013-11-08 | 2016-02-23 | Ethicon Endo-Surgery, Llc | Electrosurgical devices |
| GB2521229A (en) | 2013-12-16 | 2015-06-17 | Ethicon Endo Surgery Inc | Medical device |
| GB2521228A (en) | 2013-12-16 | 2015-06-17 | Ethicon Endo Surgery Inc | Medical device |
| US9795436B2 (en) | 2014-01-07 | 2017-10-24 | Ethicon Llc | Harvesting energy from a surgical generator |
| JP6869723B2 (ja) * | 2014-03-17 | 2021-05-12 | インテュイティブ サージカル オペレーションズ, インコーポレイテッド | アクチュエータ制御手術器具のための表示機構 |
| US9554854B2 (en) | 2014-03-18 | 2017-01-31 | Ethicon Endo-Surgery, Llc | Detecting short circuits in electrosurgical medical devices |
| US10463421B2 (en) | 2014-03-27 | 2019-11-05 | Ethicon Llc | Two stage trigger, clamp and cut bipolar vessel sealer |
| US10092310B2 (en) | 2014-03-27 | 2018-10-09 | Ethicon Llc | Electrosurgical devices |
| US9737355B2 (en) | 2014-03-31 | 2017-08-22 | Ethicon Llc | Controlling impedance rise in electrosurgical medical devices |
| US9913680B2 (en) | 2014-04-15 | 2018-03-13 | Ethicon Llc | Software algorithms for electrosurgical instruments |
| US20150297200A1 (en) * | 2014-04-17 | 2015-10-22 | Covidien Lp | End of life transmission system for surgical instruments |
| US10133248B2 (en) | 2014-04-28 | 2018-11-20 | Covidien Lp | Systems and methods for determining an end of life state for surgical devices |
| US10285724B2 (en) | 2014-07-31 | 2019-05-14 | Ethicon Llc | Actuation mechanisms and load adjustment assemblies for surgical instruments |
| CA2957622C (en) | 2014-09-04 | 2023-07-04 | Memic Innovative Surgery Ltd. | Control of device including mechanical arms |
| DE102014117408A1 (de) * | 2014-11-27 | 2016-06-02 | avateramedical GmBH | Vorrichtung zur robotergestützten Chirurgie |
| US10639092B2 (en) | 2014-12-08 | 2020-05-05 | Ethicon Llc | Electrode configurations for surgical instruments |
| US10245095B2 (en) | 2015-02-06 | 2019-04-02 | Ethicon Llc | Electrosurgical instrument with rotation and articulation mechanisms |
| JP6109440B2 (ja) * | 2015-02-25 | 2017-04-05 | オリンパス株式会社 | マニピュレータ |
| EP3267920A4 (en) * | 2015-03-10 | 2019-03-06 | Covidien LP | MEASURING THE HEALTH OF A CONNECTING ELEMENT OF A SURGICAL ROBOTIC SYSTEM |
| US10321950B2 (en) | 2015-03-17 | 2019-06-18 | Ethicon Llc | Managing tissue treatment |
| US10342602B2 (en) | 2015-03-17 | 2019-07-09 | Ethicon Llc | Managing tissue treatment |
| US10595929B2 (en) | 2015-03-24 | 2020-03-24 | Ethicon Llc | Surgical instruments with firing system overload protection mechanisms |
| US10034684B2 (en) | 2015-06-15 | 2018-07-31 | Ethicon Llc | Apparatus and method for dissecting and coagulating tissue |
| US11020140B2 (en) | 2015-06-17 | 2021-06-01 | Cilag Gmbh International | Ultrasonic surgical blade for use with ultrasonic surgical instruments |
| US10357303B2 (en) | 2015-06-30 | 2019-07-23 | Ethicon Llc | Translatable outer tube for sealing using shielded lap chole dissector |
| US11051873B2 (en) | 2015-06-30 | 2021-07-06 | Cilag Gmbh International | Surgical system with user adaptable techniques employing multiple energy modalities based on tissue parameters |
| US11129669B2 (en) | 2015-06-30 | 2021-09-28 | Cilag Gmbh International | Surgical system with user adaptable techniques based on tissue type |
| US10898256B2 (en) | 2015-06-30 | 2021-01-26 | Ethicon Llc | Surgical system with user adaptable techniques based on tissue impedance |
| US10034704B2 (en) | 2015-06-30 | 2018-07-31 | Ethicon Llc | Surgical instrument with user adaptable algorithms |
| US10765470B2 (en) | 2015-06-30 | 2020-09-08 | Ethicon Llc | Surgical system with user adaptable techniques employing simultaneous energy modalities based on tissue parameters |
| US10154852B2 (en) | 2015-07-01 | 2018-12-18 | Ethicon Llc | Ultrasonic surgical blade with improved cutting and coagulation features |
| WO2017037723A1 (en) * | 2015-09-04 | 2017-03-09 | Memic Innovative Surgery Ltd. | Actuation of a device comprising mechanical arms |
| US10687884B2 (en) | 2015-09-30 | 2020-06-23 | Ethicon Llc | Circuits for supplying isolated direct current (DC) voltage to surgical instruments |
| US10595930B2 (en) | 2015-10-16 | 2020-03-24 | Ethicon Llc | Electrode wiping surgical device |
| US10179022B2 (en) | 2015-12-30 | 2019-01-15 | Ethicon Llc | Jaw position impedance limiter for electrosurgical instrument |
| US10575892B2 (en) | 2015-12-31 | 2020-03-03 | Ethicon Llc | Adapter for electrical surgical instruments |
| US10842523B2 (en) | 2016-01-15 | 2020-11-24 | Ethicon Llc | Modular battery powered handheld surgical instrument and methods therefor |
| US10716615B2 (en) | 2016-01-15 | 2020-07-21 | Ethicon Llc | Modular battery powered handheld surgical instrument with curved end effectors having asymmetric engagement between jaw and blade |
| US11229471B2 (en) | 2016-01-15 | 2022-01-25 | Cilag Gmbh International | Modular battery powered handheld surgical instrument with selective application of energy based on tissue characterization |
| US11129670B2 (en) | 2016-01-15 | 2021-09-28 | Cilag Gmbh International | Modular battery powered handheld surgical instrument with selective application of energy based on button displacement, intensity, or local tissue characterization |
| US10555769B2 (en) | 2016-02-22 | 2020-02-11 | Ethicon Llc | Flexible circuits for electrosurgical instrument |
| LT3219283T (lt) | 2016-03-09 | 2021-03-10 | Memic Innovative Surgery Ltd. | Modulinis chirurginis įtaisas, apimantis mechanines rankas |
| JP2017177290A (ja) * | 2016-03-30 | 2017-10-05 | ソニー株式会社 | アーム制御方法及びアーム制御装置 |
| US10485607B2 (en) | 2016-04-29 | 2019-11-26 | Ethicon Llc | Jaw structure with distal closure for electrosurgical instruments |
| US10702329B2 (en) | 2016-04-29 | 2020-07-07 | Ethicon Llc | Jaw structure with distal post for electrosurgical instruments |
| US10646269B2 (en) | 2016-04-29 | 2020-05-12 | Ethicon Llc | Non-linear jaw gap for electrosurgical instruments |
| US10456193B2 (en) | 2016-05-03 | 2019-10-29 | Ethicon Llc | Medical device with a bilateral jaw configuration for nerve stimulation |
| AU2017269374B2 (en) | 2016-05-26 | 2021-07-08 | Covidien Lp | Instrument drive units |
| JP2019519280A (ja) | 2016-05-26 | 2019-07-11 | コヴィディエン リミテッド パートナーシップ | ロボット外科手術アセンブリおよびその器具駆動部 |
| US11272992B2 (en) | 2016-06-03 | 2022-03-15 | Covidien Lp | Robotic surgical assemblies and instrument drive units thereof |
| GB2551541B (en) | 2016-06-21 | 2021-09-01 | Cmr Surgical Ltd | Instrument-arm communications in a surgical robotic system |
| US10245064B2 (en) | 2016-07-12 | 2019-04-02 | Ethicon Llc | Ultrasonic surgical instrument with piezoelectric central lumen transducer |
| US10893883B2 (en) | 2016-07-13 | 2021-01-19 | Ethicon Llc | Ultrasonic assembly for use with ultrasonic surgical instruments |
| US10842522B2 (en) | 2016-07-15 | 2020-11-24 | Ethicon Llc | Ultrasonic surgical instruments having offset blades |
| US10376305B2 (en) | 2016-08-05 | 2019-08-13 | Ethicon Llc | Methods and systems for advanced harmonic energy |
| US10285723B2 (en) | 2016-08-09 | 2019-05-14 | Ethicon Llc | Ultrasonic surgical blade with improved heel portion |
| USD847990S1 (en) | 2016-08-16 | 2019-05-07 | Ethicon Llc | Surgical instrument |
| US10952759B2 (en) | 2016-08-25 | 2021-03-23 | Ethicon Llc | Tissue loading of a surgical instrument |
| US10736649B2 (en) | 2016-08-25 | 2020-08-11 | Ethicon Llc | Electrical and thermal connections for ultrasonic transducer |
| JP7044760B2 (ja) * | 2016-09-09 | 2022-03-30 | インテュイティブ サージカル オペレーションズ, インコーポレイテッド | 可撓性引張部材を用いたプッシュ/プル方式の手術用器具エンドエフェクタの作動 |
| US10603064B2 (en) | 2016-11-28 | 2020-03-31 | Ethicon Llc | Ultrasonic transducer |
| US11266430B2 (en) | 2016-11-29 | 2022-03-08 | Cilag Gmbh International | End effector control and calibration |
| US10973592B2 (en) | 2017-03-09 | 2021-04-13 | Memie Innovative Surgery Ltd. | Control console for surgical device with mechanical arms |
| US11779410B2 (en) | 2017-03-09 | 2023-10-10 | Momentis Surgical Ltd | Control console including an input arm for control of a surgical mechanical arm |
| US10820920B2 (en) | 2017-07-05 | 2020-11-03 | Ethicon Llc | Reusable ultrasonic medical devices and methods of their use |
| CN107334530B (zh) * | 2017-07-31 | 2021-04-16 | 成都博恩思医学机器人有限公司 | 一种用于微创手术机器人的手术器械及微创手术机器人 |
| CN107320183B (zh) * | 2017-07-31 | 2021-03-19 | 成都博恩思医学机器人有限公司 | 一种用于微创手术机器人的手术器械及微创手术机器人 |
| EP3664739A4 (en) * | 2017-08-10 | 2021-04-21 | Intuitive Surgical Operations, Inc. | SYSTEMS AND METHODS FOR DISPLAYS OF INTERACTION POINTS IN A TELEOPERATIONAL SYSTEM |
| US11134932B2 (en) | 2018-08-13 | 2021-10-05 | Covidien Lp | Specimen retrieval device |
| US11759251B2 (en) | 2019-12-30 | 2023-09-19 | Cilag Gmbh International | Control program adaptation based on device status and user input |
| US11950797B2 (en) | 2019-12-30 | 2024-04-09 | Cilag Gmbh International | Deflectable electrode with higher distal bias relative to proximal bias |
| US11786291B2 (en) | 2019-12-30 | 2023-10-17 | Cilag Gmbh International | Deflectable support of RF energy electrode with respect to opposing ultrasonic blade |
| US11779387B2 (en) | 2019-12-30 | 2023-10-10 | Cilag Gmbh International | Clamp arm jaw to minimize tissue sticking and improve tissue control |
| US11812957B2 (en) | 2019-12-30 | 2023-11-14 | Cilag Gmbh International | Surgical instrument comprising a signal interference resolution system |
| US11707318B2 (en) | 2019-12-30 | 2023-07-25 | Cilag Gmbh International | Surgical instrument with jaw alignment features |
| US11779329B2 (en) | 2019-12-30 | 2023-10-10 | Cilag Gmbh International | Surgical instrument comprising a flex circuit including a sensor system |
| US11696776B2 (en) | 2019-12-30 | 2023-07-11 | Cilag Gmbh International | Articulatable surgical instrument |
| US11937863B2 (en) | 2019-12-30 | 2024-03-26 | Cilag Gmbh International | Deflectable electrode with variable compression bias along the length of the deflectable electrode |
| US11911063B2 (en) | 2019-12-30 | 2024-02-27 | Cilag Gmbh International | Techniques for detecting ultrasonic blade to electrode contact and reducing power to ultrasonic blade |
| US11986201B2 (en) | 2019-12-30 | 2024-05-21 | Cilag Gmbh International | Method for operating a surgical instrument |
| US11974801B2 (en) | 2019-12-30 | 2024-05-07 | Cilag Gmbh International | Electrosurgical instrument with flexible wiring assemblies |
| US11452525B2 (en) | 2019-12-30 | 2022-09-27 | Cilag Gmbh International | Surgical instrument comprising an adjustment system |
| US11944366B2 (en) | 2019-12-30 | 2024-04-02 | Cilag Gmbh International | Asymmetric segmented ultrasonic support pad for cooperative engagement with a movable RF electrode |
| US20210196359A1 (en) | 2019-12-30 | 2021-07-01 | Ethicon Llc | Electrosurgical instruments with electrodes having energy focusing features |
| US11660089B2 (en) | 2019-12-30 | 2023-05-30 | Cilag Gmbh International | Surgical instrument comprising a sensing system |
| US11937866B2 (en) | 2019-12-30 | 2024-03-26 | Cilag Gmbh International | Method for an electrosurgical procedure |
| US20230093375A1 (en) * | 2020-05-08 | 2023-03-23 | Covidien Lp | Surgical robotic systems |
Citations (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2009153989A (ja) * | 2001-08-08 | 2009-07-16 | Stryker Corp | 外科用電動ハンドピースとともに使用する取付具 |
| JP2010214128A (ja) * | 2010-05-19 | 2010-09-30 | Olympus Medical Systems Corp | 処置具システム及びマニピュレータシステム |
| JP2010227331A (ja) * | 2009-03-27 | 2010-10-14 | Terumo Corp | 医療用マニピュレータ |
Family Cites Families (13)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US5359993A (en) * | 1992-12-31 | 1994-11-01 | Symbiosis Corporation | Apparatus for counting the number of times a medical instrument has been used |
| US6331181B1 (en) * | 1998-12-08 | 2001-12-18 | Intuitive Surgical, Inc. | Surgical robotic tools, data architecture, and use |
| US6231565B1 (en) * | 1997-06-18 | 2001-05-15 | United States Surgical Corporation | Robotic arm DLUs for performing surgical tasks |
| SE9702679D0 (sv) * | 1997-07-11 | 1997-07-11 | Siemens Elema Ab | Anordning för att räkna antalet användningar av en givare |
| JP4142173B2 (ja) * | 1998-10-09 | 2008-08-27 | アルフレッサファーマ株式会社 | ディスポーザブル医療器具及びこれを組み込んだ医療装置 |
| US20040176751A1 (en) * | 2002-08-14 | 2004-09-09 | Endovia Medical, Inc. | Robotic medical instrument system |
| US7303108B2 (en) * | 2003-09-29 | 2007-12-04 | Ethicon Endo-Surgery, Inc. | Surgical stapling instrument incorporating a multi-stroke firing mechanism with a flexible rack |
| JP2006155199A (ja) * | 2004-11-29 | 2006-06-15 | Nachi Fujikoshi Corp | サーボモータのブレーキ寿命監視方法および装置 |
| WO2007014355A2 (en) * | 2005-07-27 | 2007-02-01 | Power Medical Interventions, Inc. | Shaft, e.g., for an electro-mechanical surgical device |
| US7835823B2 (en) * | 2006-01-05 | 2010-11-16 | Intuitive Surgical Operations, Inc. | Method for tracking and reporting usage events to determine when preventive maintenance is due for a medical robotic system |
| JP5085996B2 (ja) * | 2006-10-25 | 2012-11-28 | テルモ株式会社 | マニピュレータシステム |
| US7922063B2 (en) * | 2007-10-31 | 2011-04-12 | Tyco Healthcare Group, Lp | Powered surgical instrument |
| CN201353203Y (zh) * | 2009-02-09 | 2009-12-02 | 李晴航 | 计算机辅助手术术中定位系统 |
-
2010
- 2010-12-02 JP JP2010269301A patent/JP5734631B2/ja active Active
-
2011
- 2011-11-28 WO PCT/JP2011/077302 patent/WO2012073849A1/ja active Application Filing
- 2011-11-28 EP EP11844452.0A patent/EP2623063B1/en active Active
- 2011-11-28 CN CN201180057298.4A patent/CN103228226B/zh active Active
- 2011-12-01 US US13/308,718 patent/US20120143211A1/en not_active Abandoned
Patent Citations (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2009153989A (ja) * | 2001-08-08 | 2009-07-16 | Stryker Corp | 外科用電動ハンドピースとともに使用する取付具 |
| JP2010227331A (ja) * | 2009-03-27 | 2010-10-14 | Terumo Corp | 医療用マニピュレータ |
| JP2010214128A (ja) * | 2010-05-19 | 2010-09-30 | Olympus Medical Systems Corp | 処置具システム及びマニピュレータシステム |
Cited By (8)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| KR101366794B1 (ko) | 2012-06-27 | 2014-02-26 | 한국과학기술원 | 유연한 수술도구용 경도조절장치 |
| WO2015012023A1 (ja) * | 2013-07-24 | 2015-01-29 | オリンパス株式会社 | 医療用マニピュレータ |
| JP2015023886A (ja) * | 2013-07-24 | 2015-02-05 | オリンパス株式会社 | 医療用マニピュレータ |
| US10881475B2 (en) | 2015-07-09 | 2021-01-05 | Kawasaki Jukogyo Kabushiki Kaisha | Surgical robot |
| JP2022002787A (ja) * | 2017-08-10 | 2022-01-11 | インテュイティブ サージカル オペレーションズ, インコーポレイテッド | 遠隔手術システムでの器具の使用可能寿命の延長 |
| KR20220042477A (ko) * | 2017-08-10 | 2022-04-05 | 인튜어티브 서지컬 오퍼레이션즈 인코포레이티드 | 원격 수술 시스템에서 사용 가능한 기구 수명 증가 |
| US11617628B2 (en) | 2017-08-10 | 2023-04-04 | Intuitive Surgical Operations, Inc. | Increased usable instrument life in telesurgical systems |
| KR102607089B1 (ko) * | 2017-08-10 | 2023-11-29 | 인튜어티브 서지컬 오퍼레이션즈 인코포레이티드 | 원격 수술 시스템에서 사용 가능한 기구 수명 증가 |
Also Published As
| Publication number | Publication date |
|---|---|
| JP5734631B2 (ja) | 2015-06-17 |
| CN103228226A (zh) | 2013-07-31 |
| CN103228226B (zh) | 2016-08-10 |
| WO2012073849A1 (ja) | 2012-06-07 |
| US20120143211A1 (en) | 2012-06-07 |
| EP2623063A1 (en) | 2013-08-07 |
| EP2623063B1 (en) | 2015-09-16 |
| EP2623063A4 (en) | 2013-11-20 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP5734631B2 (ja) | 手術支援システム | |
| JP6808636B2 (ja) | 回転可能なシャフト上に配置された信号及び電力通信システム | |
| JP6779894B2 (ja) | ローカル信号処理を有するスマートセンサ | |
| JP6786505B2 (ja) | 電動外科用器具用の双方向フィードバックシステム | |
| RU2727594C2 (ru) | Хирургический сшивающий инструмент с управлением двигателем на основе токового зеркала | |
| JP6786506B2 (ja) | 外科用ステープラへのステープルカートリッジの誤挿入を検出するためのシステム | |
| JP6855485B2 (ja) | 駆動システム構成要素に基づいたモータ制御を有する外科用ステープラ | |
| US20120130160A1 (en) | Imaging system with disposable part | |
| CN107530081B (zh) | 利用来自柄部的选择控制处理的控制技术和容纳在模块化轴内的子处理器 | |
| JP6779895B2 (ja) | 測定の安定性要素、クリープ要素、及び粘弾性要素を決定するためのセンサデータの時間依存性評価 | |
| JP6698680B2 (ja) | ロック可能な電池ハウジングを含む、外科用器具 | |
| CN103767750B (zh) | 带有快速事后检测的手术器械 | |
| EP2739232B1 (en) | Medical equipment | |
| RU2628048C2 (ru) | Хирургический инструмент с механизмом переключения направления с различной скоростью | |
| JP2012161590A (ja) | 医療用マニピュレータシステム | |
| CN115444481A (zh) | 电池更换/手术计数的数目的验证 | |
| JP2018510694A (ja) | 電動外科用器具のためのモータの速度制御の監視及び精度の増分 | |
| JP2015221226A (ja) | イメージング装置 | |
| JP2010220955A (ja) | 医療用マニピュレータ、及びその初期化方法 | |
| CN106413581B (zh) | 具有可拆卸轴组件的模块化加电外科器械 | |
| CN109770823B (zh) | 一种电驱动内窥镜及操作方法 | |
| EP1972250A1 (en) | Endoscope system, program, and control method for endoscope system | |
| JP6776030B2 (ja) | 医療器具 | |
| WO2018189856A1 (ja) | マニピュレータシステム | |
| US20240115117A1 (en) | Manipulator system, manipulator system control method, and manipulator system control device |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20131029 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20140909 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20141104 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20150331 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20150415 |
|
| R151 | Written notification of patent or utility model registration |
Ref document number: 5734631 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R151 |
|
| S531 | Written request for registration of change of domicile |
Free format text: JAPANESE INTERMEDIATE CODE: R313531 |
|
| R350 | Written notification of registration of transfer |
Free format text: JAPANESE INTERMEDIATE CODE: R350 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |