<第1実施形態>
以下、本発明の実施形態について図面を参照しながら説明するが、本発明はこれに限定されない。以下の説明では、XYZ直交座標系を参照しつつ各部の位置関係について説明する。このXYZ直交座標系において、水平面内の所定方向をX軸方向、水平面内においてX軸方向と直交する方向をY軸方向、X軸方向及びY軸方向のそれぞれと直交する方向(すなわち鉛直方向)をZ軸方向とする。X軸、Y軸、及びZ軸まわりの回転(傾斜)方向をそれぞれ、θX、θY、及びθZ方向とする。
図1は、第1実施形態のデバイス製造システムの一例を示す図である。本例のデバイス製造システムSYSは、コータデベロッパ装置CD、露光装置EX、及びインターフェース部IFを含む。デバイス製造システムSYSは、デバイス製造用の基板Pに各種処理を行う。デバイス製造用の基板Pには、必要に応じて、図示略の成膜装置等によってデバイスを構成する膜が形成される。この膜は、例えば、配線や電極となる導電膜、各種ダイオードの半導体層となる半導体膜、保護膜や誘電体となる絶縁膜等である。
本例のデバイス製造システムSYSは、概略すると以下のように動作する。コータデベロッパ装置CDは、デバイス製造用の基板Pに感光材(フォトレジスト)の膜を形成する。本例のインターフェース部IFは、ロードロック機構を含み、コータデベロッパ装置CDと露光装置EXとを接続している。感光材の膜が形成された基板Pは、インターフェース部IFを介して露光装置EXに搬送される。露光装置EXは、基板Pにパターンを露光する。露光された基板Pは、インターフェース部IFを介してコータデベロッパ装置CDに搬送される。コータデベロッパ装置CDは、露光処理後の基板Pを現像する。現像処理後の基板Pは、必要に応じて、図示略のエッチング装置等によってエッチングされる。
次に、デバイス製造システムSYSの構成要素について説明する。本例の露光装置EXは、液浸露光装置である。本発明は、液浸露光以外の露光装置にも適用可能である。本例の露光装置EXは、マスクステージ1、基板ステージ2、照明光学系IL、投影光学系PL、液浸部材3、制御装置4、記憶装置5、第1干渉計6、第2干渉計7、第1搬送装置8、表面検出装置9、及び第1チャンバ装置CH1を含む。
マスクステージ1は、マスクMを保持して移動可能である。第1干渉計6は、マスクステージ1の位置を計測する。照明光学系ILは、マスクMを露光光ELで照明する。第1搬送装置8は、インターフェース部IFと基板ステージ2との間で基板Pを搬送する。表面検出装置9は、基板Pの表面等を検出する。基板ステージ2は、基板Pを保持して移動可能である。第2干渉計7は、基板ステージ2の位置を計測する。液浸部材3は、基板Pに照射される露光光ELの光路が液体LQ1で満たされるように基板Pとの間で液体LQ1を保持して、液浸空間を形成する。投影光学系PLは、露光光ELで照明されたマスクMのパターンの像を基板Pに投影する。制御装置4は、記憶装置5に記憶されているプログラムやデータに基づいて、露光装置EXを制御する。
マスクステージ1は、マスクMを保持した状態で、照明領域を含む領域を移動可能である。マスクMは、基板Pに投影されるデバイスパターンが形成されたレチクルを含む。本例のマスクMは、透過型マスクを含む。この透過型マスクは、例えば、ガラス板等の透明板と、その透明板上にクロム等の遮光材料を用いて形成されたパターンとを有する。マスクステージ1は、例えば米国特許第6452292号明細書に開示されているような平面モータを含む駆動システムの作動により、X軸、Y軸、Z軸、θX、θY、及びθZ方向の6つの方向に移動可能である。
基板ステージ2は、基板Pを保持した状態で、投影領域を含む領域を移動可能である。本例の基板ステージ2は、マスクステージ1と同様の駆動システムの作動により、X軸、Y軸、Z軸、θX、θY、及びθZ方向の6つの方向に移動可能である。基板ステージ2を移動させる駆動システムは、平面モータでなくてもよい。
本例の基板ステージ2は、例えば米国特許出願公開第2007/0177125号明細書、及び米国特許出願公開第2008/0049209号明細書等に開示されているような、カバー部材をリリース可能に保持するカバー部材保持部を含む。本例の基板ステージ2の上面は、カバー部材保持部に保持されたカバー部材の上面を含む。基板ステージ2の上面が、基板ステージ2に搭載されているセンサ、計測部材等の表面を含んでもよい。
本例の基板ステージ2は、基板Pをリリース可能に保持する基板保持部を含む。基板保持部は、基板Pの表面が+Z方向を向くように基板Pを保持する。本例では、基板保持部に保持された基板Pの表面と、その基板Pの周囲に配置される基板ステージ2の上面とは、ほぼ同一平面内に配置される(面一である)。
照明光学系ILは、所定の照明領域に露光光ELを照射する。照明光学系ILは、照明領域に配置されたマスクMの少なくとも一部を均一な照度分布の露光光ELで照明する。照明光学系ILから射出される露光光ELとして、例えば水銀ランプから射出される輝線(g線、h線、i線)及びKrFエキシマレーザ光(波長248nm)等の遠紫外光(DUV光)、ArFエキシマレーザ光(波長193nm)、及びF2レーザ光(波長157nm)等の真空紫外光(VUV光)等が用いられる。本例では、露光光ELとして、紫外光(真空紫外光)であるArFエキシマレーザ光を用いる。
投影光学系PLは、所定の投影領域に露光光ELを照射する。本例の露光装置EXは、図示略の合焦装置を含んでいる。この合焦装置は、検出光を基板Pに照射して基板Pの表面(露光対象面)を検出し、投影光学系PLの焦点を露光対象面に合わせることが可能である。投影光学系PLは、投影領域に配置された基板Pの少なくとも一部に、マスクMのパターンの像を所定の投影倍率で投影する。投影光学系PLは、縮小系、等倍系、及び拡大系のいずれでもよい。本例の投影光学系PLの光軸AXは、Z軸と平行である。投影光学系PLは、投影光学系PLの像面に向けて露光光ELを射出する射出面を有する。投影光学系PLは、反射光学素子を含まない屈折系、屈折光学素子を含まない反射系、反射光学素子と屈折光学素子とを含む反射屈折系のいずれでもよい。投影光学系PLは、倒立像と正立像のいずれを形成してもよい。
第1干渉計6は、マスクステージ1に配置された計測ミラーを用いて、レーザ光の干渉によりマスクステージ1の位置を計測可能である。第2干渉計7は、基板ステージ2に配置された計測ミラーを用いて、レーザ光の干渉により基板ステージ2の位置を計測可能である。基板Pの露光処理、あるいは所定の計測処理を実行するとき、制御装置4は、第1干渉計6及び第2干渉計7の計測結果に基づいて、マスクステージ1(マスクM)及び基板ステージ2(基板P)の位置制御を実行する。
本例の露光装置EXは、マスクMと基板Pとを所定の走査方向に同期移動しつつ、マスクMのパターンの像を基板Pに投影する走査型露光装置(所謂スキャニングステッパ)である。本例では、基板Pの走査方向(同期移動方向)をY軸方向とし、マスクMの走査方向(同期移動方向)もY軸方向とする。制御装置4は、基板Pを投影光学系PLの投影領域に対してY軸方向に移動するとともに、その基板PのY軸方向への移動と同期して、照明光学系ILの照明領域に対してマスクMをY軸方向に移動しつつ、投影光学系PLと基板P上の液浸空間の液体LQ1とを介して基板Pに露光光ELを照射する。
液浸部材3は、投影領域に照射される露光光ELの光路が液体LQ1で満たされるように液浸空間を形成する。液浸部材3は、投影光学系PLの射出面と、射出面から射出される露光光ELを照射可能な位置に配置される物体との間の露光光ELの光路が液体LQ1で満たされるように、物体との間で液体LQ1を保持して液浸空間を形成する。
制御装置4は、露光装置EX全体の動作を制御する。記憶装置5は、制御装置4に接続されており、露光に関する各種の情報を記憶する。制御装置4及び記憶装置5は、例えばコンピュータシステムの一部又は全部である。記憶装置5は、例えばRAM等のメモリ、ハードディスク、CD−ROM等の記録媒体を含む。記憶装置5には、コンピュータシステムを制御するオペレーティングシステム(OS)がインストールされ、露光装置EXを制御するためのプログラムが記憶されている。
第1搬送装置8は、露光処理前の基板Pを、露光装置EXの基板ステージ2に搬入(ロード)する。第1搬送装置8は、露光処理後の基板Pを露光装置EXの基板ステージ2から搬出(アンロード)する。
本例の表面検出装置9は、本発明を適用した装置である。本例の表面検出装置9は、第1搬送装置8の搬送経路に配置されている。本例の表面検出装置9は、第1搬送装置8の搬送経路に対して固定されている。表面検出装置9は、その構成を後述するが、基板Pの光学特性に依らずに基板Pの表面を検出可能である。本例の制御装置4は、上述の合焦装置による基板Pの表面の検出結果と、表面検出装置9の検出結果とを比較して合焦の成否を判定する。本例の制御装置4は、合焦の成否の判定結果に基づいて、合焦装置を制御する。なお、基板ステージ1とインターフェース部IFとの間の搬送経路に、計測ステージが配置されていてもよい。計測ステージに、基板Pの表面を光学的に検出する検出装置が配置されていてもよい。この検出装置は、基板Pに検出光を照射し、基板Pを経由した光を検出する装置であってもよい。この検出装置の結果と、表面検出装置9の検出結果とを併用して、基板Pの表面を検出してもよい。
第1チャンバ装置CH1は、少なくとも投影光学系PL、液浸部材3、及び基板ステージ2が配置される内部空間を形成する。第1チャンバ装置CH1は、内部空間の環境(温度、湿度、圧力、及びクリーン度)を制御する環境制御装置を含む。
コータデベロッパ装置CDは、装置本体10、浸漬装置11、温度調整装置12、第2搬送装置13、及び第2チャンバ装置CH2を含む。第2チャンバ装置CH2は、第1チャンバ装置CH1と同様の装置であり、第1チャンバとは別の内部空間を形成する。装置本体10は、第2チャンバ装置CH2の内部空間に配置されている。第2搬送装置13は、装置本体10とインターフェース部IFとの間で基板Pを搬送する。装置本体10は、塗布装置及び現像装置を含む。この塗布装置は、露光処理前の基板Pに対して感光材(レジスト)を塗布する。現像装置は、露光処理後の基板Pを現像処理する。浸漬装置11及び温度調整装置12は、第2搬送装置13の搬送経路に配置されている。浸漬装置11は、基板Pを第2液体LQ2に浸漬する。温度調整装置12は、基板Pの温度調整を行う。
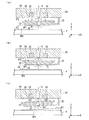
図2は、第1実施形態に係る表面検出装置の一例を示す図である。図2(a)は、表面検出装置9を下方(−Z側)から見た平面図に相当し、図2(b)は、図2(a)のA−A’線断面図に相当する。
本例の表面検出装置9は、第1部材20、第2部材21、第3部材22、及び検出部23を含む。表面検出装置9により基板P(検出対象物)の表面(検出対象面)を検出するとき(以下、検出動作時という)に、第1部材20は、検出対象面から+Z側に離れた位置に配置される。第1部材20は、流体Gの吹出口24を有する。検出動作時に、第2部材21は、第1部材20と基板Pとの間に配置される。第2部材21は、吹出口24からの流体Gの少なくとも一部が流入する流入口27、及び流入口27を通った流体Gが検出対象面に向かって流出する流出口28を有する。第3部材22は、第1部材20からと第2部材21までの最大距離を規制する。検出部23は、流出口28から流出する流体Gの流れ方向(Z方向)における第2部材21の位置を検出する。
本例の第1部材20は、吹出口24に通じる内部流路25を有する。内部流路25は、流体Gを供給可能な供給部(以下、流体供給部GSという)に接続される。本例の内部流路25は、吹出口24に向うにつれて、内寸(内径)が縮小するノズル形状を含む。本例の流体Gは、窒素ガス等の不活性ガスである。流体Gは、気相、液相、液相及び気相の混相のいずれでもよい。本例の露光装置EXは、流体供給部GSを含んでいる。流体供給部GSの一部又は全部が、露光装置EXの外部装置であっても構わない。
本例の第1部材20は、円板状の部材を含む。本例の第1部材20は、検出動作時の基板Pを向けて配置される下面26を有する。第2部材21は、第1部材20の下面26の少なくとも一部と対向するように配置される。本例の下面26は、第2部材21と対向する領域が、実質的に平面である。下面26は、第2部材21に向って凸形状となる曲面と第2部材21に向って凹形状となる曲面の少なくとも一方を含んでもよい。吹出口24は、下面26に配置されている。流体供給部GSから供給された流体Gは、内部流路25を通って吹出口24から第1部材20の外部に吹出される。本例では、吹出口24から吹出された流体Gの少なくとも一部が、−Z側に向かって流れる。
本例の第2部材21は、円板状の部材を含む。第2部材21の外寸(直径)は、例えば10μm以上10mm以下であり、25μm以上4mm以下、あるいは50μm以上2mm以下であってもよい。本例の第2部材21は、第1面(以下、上面30という)と、第1面とは異なる方向を向く第2面(以下、下面31という)とを有する。本例の第2部材21は、上面30と下面31とを結ぶ孔(openingsまたはpores)29を有する。本例の孔29は、貫通孔であり、その一方の開口が流入口27、他方の開口が流出口28である。本例では、流入口27と流出口28とを結ぶ線が、Z方向に平行である。
本例の孔29は、上面30から下面31に向かう方向で、内寸(内径)が実質的に変化しないストレートな貫通孔である。孔29は、上面30と下面31の一方から他方に向かう方向に、内寸(内径)が縮小するテーパ形状でもよい。例えば、孔29は、上面30から下面31に向かうにつれて、内寸(内径)が縮小するノズル形状を含んでいてもよい。
第2部材21は、複数の孔29を有していてもよい。第2部材21は、網目状に多数の孔(気孔、pores)が形成された多孔部材(ポーラス部材)を含んでいてもよい。第2部材21の上面30を含む部分が孔(openings)を含む部材であり、第2部材21のうちの下面31を含む部分が多孔部材であってもよい。
第2部材21の上面30は、第1部材20の下面26に対向して配置される。本例の上面30は、実質的に平面である。上面30は、第1部材20に向って凸形状となる曲面と第1部材20に向って凹形状となる曲面の少なくとも一方を含んでもよい。流入口27は、上面30に配置されている。検出動作時に、Z方向から平面視した状態で吹出口24の少なくとも一部が流入口27と重なるように、第2部材21が配置される。第2部材21の下面31は、基板Pの表面に対向して配置される。本例の下面31は、実質的に平面である。下面31は、基板Pの表面に向って凸形状となる曲面と基板Pの表面に向って凹形状となる曲面の少なくとも一方を含んでもよい。流出口28は、下面31に配置されている。すなわち、検出動作時に、流出口28が基板Pの表面を向くように、第2部材21が配置される。
本例の第2部材21は、孔29の周縁部と比較して薄厚の外縁部32を含む。本例では、孔29の周縁部が外縁部32よりも−Z側に突出している。本例では、外縁部32が第3部材22に支持される。
本例の第3部材22は、第1部材20の下面26と接続されている。本例では、第2部材21を囲むように、複数の第3部材22が配置されている。本例の第3部材22は、第1部材20から−Z側に突出して、XY面に沿う方向に折れ曲がっている。本例の第3部材22は、Z方向を含む断面がL字形状である。表面検出装置9と基板Pとが対向していない状態、あるいは吹出口24から流体Gが吹出されていない状態で、第3部材22においてXY面に沿う方向に延びる部分に、第2部材21の外縁部32が載置(支持)される。第2部材21は、その外縁部32が第3部材22よりも基板P側に移動することが抑制されている。本例では、第2部材21が第3部材22に支持されている状態で、第3部材22が第2部材21よりも基板P側に突出しないように、外縁部32の板厚が設定されている。
なお、第3部材22は、圧縮力に対する変形量が引張力に対する変形量よりも十分に大きい部材、例えば糸状の部材等であってもよい。第3部材22が糸状の部材であって、この部材の一端側が第2部材21に接続されているとともに、他端側が第1部材20又は他の部材に接続されており、第3部材22を介して第2部材21が支持されていてもよい。
本例の検出部23は、少なくとも検出動作時に、表面検出装置9と基板Pと対向する方向の位置が固定される。本例の検出部23は、第1部材20に埋め込まれている。本例の第1部材20は、少なくとも検出動作時に、表面検出装置9と基板Pと対向する方向の位置が固定される。検出部23は、流出口28から流出する流体Gの流れ方向(Z方向)における第2部材21の位置を検出可能である。本例の検出部23は、第1部材20に対する相対位置が固定されており、実質的に第1部材20に対する第2部材21の位置を検出する。本例では、吹出口24を囲むように、複数の検出部23が配置されている。
本例の検出部23は、第2部材21の上面30に検出光を照射し、上面30で反射した検出光を検出することによって、検出部23(第1部材20)から第2部材21の上面30までの距離を検出する。本例の検出部23は、干渉計を含む。本例の検出部23は、上記の検出光としてレーザ光を照射し、上面30で反射したレーザ光の干渉を用いて、検出部23から上面30までの距離を測定する。第2部材21において、少なくとも検出部23からレーザ光が入射する領域は、このレーザ光に対する光学特性が既知である材質に設定される。上記の光学特性は、透過率、反射率、吸収率、及び屈折率のうちの1以上を含む。
なお、第2部材21の上面30に、第2部材21上での位置を示す識別子等が設けられていてもよい。検出部23は、この識別子に照射されたレーザ光を検出してもよい。検出部23は、第2部材21との間の静電容量を検出する静電容量計を含んでいてもよい。第2部材21が磁石等の磁力発生源を含み、検出部23が第2部材21との間の磁界を検出してもよい。第2部材21の物理特性は、検出部23の検出原理に応じて、適宜選択される。
次に、本実施形態の表面検出方法の一例について、表面検出装置9の動作と合わせて説明する。本例の表面検出方法は、流体Gの流入口27、及び流入口27を通った流体Gが流出する流出口28を有する第2部材21を、流出口28を基板Pの表面P1に向けて配置することを含む。本例の表面検出方法は、第2部材21が、流出口28を基板Pの表面P1に向けて配置された状態で、流入口27に流体Gを供給することを含む。本例の表面検出方法は、流出口28から流出した流体Gから第2部材21が受ける力によって、基板Pの表面P1から第2部材21を離すことを含む。本例の表面検出方法は、流入口27に流体Gが供給されている状態で、流出口28から流出する流体Gの流れ方向(Z方向)における第2部材21の位置を検出することを含む。
図3は、第1実施形態の表面検出装置の動作を示す説明図である。図3(a)は、基板Pの表面の凹凸を平均化した平面(以下、主面という)が表面検出装置9と対向している状態を示す図、図3(b)は、上記の主面に対して外部に凸である部分の基板Pの表面が表面検出装置9と対向している状態を示す図、図3(c)は、上記の主面に対して傾斜した部分の基板Pの表面が表面検出装置9と対向している状態を示す図である。
図3(a)に示すように、表面検出装置9が基板Pに対向している状態で、上記の流体供給部GSから流体Gが供給される。本例では、吹出口24と流入口27とが不連続(非接触)な状態で、吹出口24から流体Gが吹出される。第1部材20の吹出口24から吹出された流体Gの一部は、第1部材20の下面26と第2部材21の上面30との間の空間SP1を流れる。
第1部材20の吹出口24から吹出された流体Gの一部は、第2部材21の流入口27に流入する。流入口27を通って流出口28から流出した流体Gは、基板Pの表面P1と第2部材21の下面31との間の空間SP2を流れる。第2部材21は、空間SP2を流れる流体Gから、基板Pの表面P1から離れる方向の流体力を受ける。本例の第2部材21は、流体Gから受ける流体力によって+Z側に移動(浮上)し、第3部材22と非接触になる。本例では、第2部材21が第3部材22と非接触である状態で、第2部材21のZ方向での位置は、第2部材の下面31と基板Pの表面P1との間の距離d2と関係性がある。本例では、第2部材21が、基板Pの表面P1との距離d2が所定値になる位置でバランスする。距離d2は、流体Gの質量や流量、第2部材21の重量、孔29の形状等のパラメータによって定まる。距離d2が、例えば1μm以上100μm以下、あるいは3μm以上30μm以下になるように、上記のパラメータを設定してもよい。
検出部23は、第2部材21が第3部材22と非接触である状態で、第2部材21の上面30と検出部23(第1部材20の下面26)との距離d1を検出する。上記のように、距離d2は設定可能な値であり、第2部材21の寸法は既知であるので、検出された距離d1に基づいて表面P1のZ方向の位置を検出することができる。
本例では、検出部23の検出結果が記憶装置5に格納される。本例では、複数の検出部23が、第2部材21の上面30上で互いに異なる箇所で第2部材21の位置を検出する。複数の検出部23の検出結果を用いて、例えば補間処理を行うことにより、上面30上で検出箇所と異なる箇所でのZ方向の位置を求めてもよい。例えば、孔29が配置されている箇所での第2部材21のZ方向の位置を求めることもできる。表面検出装置9は、補間処理等の各種演算を実行する演算部を含んでいてもよい。第2部材21のZ方向の位置を求める上での補間処理等の各種演算については、制御装置4が実行してもよい。
本例では、基板Pと表面検出装置9との対向方向の交差方向に、基板Pと表面検出装置9との相対位置を変化させながら、基板Pの表面の複数箇所を検出対象箇所として、上記の対向方向における各検出対象箇所の位置を検出する。本例では、上記の対向方向がZ方向であり、上記の交差方向がX方向とY方向の少なくとも一方を含む。本例では、基板Pと表面検出装置9との相対位置が第1相対位置であるときの検出結果と、第1相対位置と異なる第2相対位置であるときの検出結果とを用いて、第2部材21のZ方向の位置を示す情報を補間する。本例では、第1相対位置と第2相対位置との間の任意の相対位置であるときの第2部材21のZ方向の位置を、補間処理により求める。この補間処理の各種演算については、制御装置4が実行してもよい。
図3(b)に示すように、基板Pの表面P1が上記の主面よりも凸であると、表面P1が主面である場合と比較して、第2部材21が基板Pから離れる方向(+Z側)に変位する。基板Pの表面P1が主面よりも凸であると、表面P1が主面である場合と比較して、第1部材20の下面26と第2部材21の上面30との距離d1が減少する。本例では、距離d2が上記の所定値になるように、距離d1は表面P1の局所的な高さに応じた値に変化する。すなわち、距離d1の検出結果に基づいて、基板Pの表面P1の凹凸を検出することができる。例えば、基板Pと表面検出装置9のX方向の相対位置を連続的又は断続的に変化させつつ、距離d1を検出することにより、表面P1のX方向での形状を求めることができる。同様にして表面P1のY方向での形状を求めることもできる。
このように、基板Pの表面の凹凸(段差)の二次元的な分布を求めることができ、得られた結果から上記の主面を規定することもできる。例えば、基板Pと表面検出装置9との相対位置をX方向及びY方向に変化させたときの、第2部材21のZ方向の位置の変化量(段差)を検出し、得られた段差分布の平均値などからZ方向の基準となる位置(高さ)を設定することができる。基準となる位置の平面を上記の主面として、基板Pの表面P1の凹凸を求めることもできる。
図3(c)に示すように、上記の主面に対して傾斜した部分の基板Pが表面検出装置9と対向していると、表面検出装置9が主面に対向している場合と比較して、第2部材21の姿勢が変化する。本例では、第2部材21が基板Pの表面P1に追従するように第2部材21の姿勢が変化する。すると、複数の検出部23により検出される距離d3、d4が互いに異なる値になり得る。本例では、複数の検出部23により検出された距離d3、d4の違いに基づいて、第2部材21の姿勢の変化を検出可能である。第2部材21の姿勢の変化を検出することにより、基板Pの表面P1の傾斜、形状、うねり等を検出することもできる。
以上のように、第1実施形態にあっては、第2部材21の位置を検出することによって検出対象面を検出することができるので、基板Pの光学特性に依らずに表面P1を検出することが期待できる。したがって、基板Pに対するフォーカス等の露光条件を高精度に設定可能になることが期待できる。よって、基板Pに対する露光不良の発生が抑制され、不良デバイスの発生が抑制されることが期待できる。
次に、表面検出装置の変形例について説明する。以下の説明では、上記の実施形態と同様の構成要素に同じ符号を付して、重複する説明を省略することがある。
図4(a)は、変形例1の表面検出装置の概略構成を示す側断面図である。本例の表面検出装置9Bは、第1部材20B、第2部材21B、第3部材22B、及び検出部23を含む。本例の第1部材20Bは、第2部材21Bと対向して配置される下面26Bを有する。本例の下面26Bは、第2部材21Bと対向する部分が第2部材21に対して凹状の曲面である。本例の第2部材21Bは、第1部材20Bと対向する上面30Bを有する。本例の第2部材21Bの上面30Bは、第1部材20Bに対して凸状の曲面である。本例では、第1部材20Bの下面26Bが、第2部材21Bの上面30Bにならう形状に設定されている。本例の第3部材22Bは、第1部材20Bと第2部材21Bとが対向する方向(Z方向)に対する、第1部材20Bの側面に接続されている。
図4(b)は、変形例2の表面検出装置の概略構成を示す側断面図である。本例の表面検出装置9Cは、第1部材20B、第2部材21C、第3部材22B、及び検出部23を含む。本例の第2部材21Cは、第2部材21Cと対向する上面30Bと、上面30Bとは異なる方向を向く下面31Cとを有する。下面31Cは、検出対象面に対向するように配置される。本例の下面31Cは、検査対象面に向かって凸状の曲面である。
図5は、変形例3の表面検出装置の概略構成を示す図である。図5(a)は、表面検出装置9Dを下方(−Z側)から、第2部材21を透かして見た平面図に相当し、図5(b)は、図5(a)のB−B’線断面図に相当する。
本例の表面検出装置9Dは、第1部材20、第2部材21、第3部材22B、及び検出部23Dを含む。本例の第1部材20は、流体Gの吹出口24と、吹出口24に接続された内部流路25とを含む。本例の検出部23Dは、静電容量計を含む。本例の検出部23Dは、吹出口24を環状に囲むように配置されている。本例の検出部23Dは、第1部材20の内部流路25と連通する貫通孔33Dを含む。内部流路25に供給された流体Gは、吹出口24から貫通孔33Dを通って、第2部材21に向けて吹出される。なお、複数の検出部が設けられており、1以上の検出部が静電容量計を含み、他の検出部が干渉計を含んでいてもよい。例えば、検出部23Dの周囲に、干渉計を含む検出部が1以上配置されていてもよい。
図6は、変形例4の表面検出装置の概略構成を示す図である。図6(a)は、表面検出装置9Eの外観図、図6(b)は、図6(a)のC−C’線断面図に相当する。
本例の表面検出装置9Eは、基板Pの搬送経路に配置されている。本例の基板Pの搬送方向はY方向である。本例では、基板Pの表面を検出するときに、表面検出装置9Eが搬送経路に対して固定されている。本例の表面検出装置9Eは、第1部材20E、複数の第2部材21、複数の第3部材22、及び複数の検出部23を含む。本例の表面検出装置9Eは、複数の検出セクション34Eを含む。本例の複数の検出セクション34Eは、基板Pの搬送方向(Y方向)に交差する方向に配列されている。本例の複数の検出セクション34Eは、搬送方向に直交する方向(X方向)に配列されている。本例の表面検出装置9Eは、検出セクション34Eが配置される位置のそれぞれにおいて、基板Pの表面を検出可能である。本例の第2部材21は、検出セクション34Eごとに配置されている。本例の第3部材22は、第2部材21ごとに配置されている。本例の第1部材20Eは、第2部材21ごとに設けられた内部流路25を含む。本例の流体供給部GSは、複数の内部流路25に流体Gを供給する。本例では、流体供給部GSからの流路が分岐しており、分岐した流路のそれぞれが第1部材20Eの内部流路25と接続されている。
図7は、変形例5の表面検出装置の概略構成を示す側断面図である。本例の表面検出装置9Fは、第1部材20、複数の第2部材21F、及び検出部23を含む。複数の第2部材21Fは、それぞれ、吹出口24からの流体Gの少なくとも一部が流入する流入口27、及び流入口27を通った流体Gが基板Pの表面に向けて流出する流出口28を有する。本例において、複数の第2部材21Fは、いずれも寸法及び形状が同じである。複数の第2部材21Fは、寸法及び形状の少なくとも一方が互いに異なっていても構わない。本例では、第1部材20と基板Pの表面との間に4つの第2部材21Fが配置される。なお、第2部材21Fの数は、2又は3でもよく、5以上でもよい。
本例において、複数の第2部材21Fのそれぞれを、第1部材20から基板Pの表面に向かう方向(−Z方向)に並ぶ順に、第1の第2部材21F、第2の第2部材21F、第3の第2部材21F、第4の第2部材21Fと称することがある。本例において、吹出口24から吹出された流体Gの少なくとも一部は、第1の第2部材21Fの流入口27に流入する。第1の第2部材21Fの流入口27に流入した流体Gは、第1の第2部材21Fの内部を流れた後に、第1の第2部材21Fの流出口28から流出する。第1の第2部材21Fの流出口28から流出した流体Gの少なくとも一部は、第2の第2部材21Fの流入口27に流入し、第2の第2部材21Fの内部及び流出口28を経由して流れる。以下同様にして、吹出口24から吹出された流体Gの少なくとも一部は、複数の第2部材21Fのそれぞれの流入口27と流出口28とを経由して、基板Pの表面に向って流れることが可能である。
本例において、検出部23は、流出口28から流出する流体Gの流れ方向における第1の第2部材21Fの位置を検出する。本例において、検出部23の検出結果に基づいて、基板Pの表面を検出することが可能である。なお、検出部23は、第1の第2部材21F以外の第2部材21Fの位置を検出してもよいし、2以上の第2部材21Fの位置を検出してもよい。また、本例において、表面処理装置は、2以上の検出部を含み、検出部が、それぞれ、流出口28から流出する流体Gの流れ方向における、1以上の第2部材21Fの位置を検出してもよい。本例において、表面処理装置は、流出口28から流出する流体Gの流れ方向と交差する方向、例えばZ方向に交差する方向から、第2部材21FのZ方向の位置を検出可能な他の検出部を、検出部23の他に有していてもよく、この検出部によって、検出部23とは異なる検出対象の第2部材21Fの位置を検出しても構わない。
図8(a)は、変形例6の表面検出装置の概略構成を示す側断面図、図8(b)は変形例6における第2部材を示す平面図である。本例の表面検出装置9Gは、第1部材20、第2部材21G、及び検出部23を含む。本例の第2部材21Gは、本体部40、及び複数の翼部41を有する。本例の本体部40は、吹出口24からの流体Gの少なくとも一部が流入する流入口27、及び流入口27を通った流体Gが基板Pの表面に向けて流出する流出口28を有する。
本例の複数の翼部41は、本体部40の周囲に離散的に配置されている。本例の複数の翼部41は、流出口28から流出する流体Gの流れ方向(Z方向)の周りに、等間隔で配置されている。本例の翼部41は、本体部40から本体部40の外側に張り出している。本例の翼部41は、流体を受けて、流出口28から流出する流体Gの流れ方向の周りに第2部材21Gを回転させる回転力を発生可能である。本例の翼部41は、吹出口24から吹出された流体Gを受けて、上記の回転力を発生可能である。
本例の第2部材21は、翼部41に発生した回転力によって、Z方向の周りに回転可能である。本例の表面検出装置は、第2部材21を回転させることにより、例えば第2部材21の姿勢(Z方向に対する傾き)を制御すること等ができる。本例の表面検出装置は、第2部材21を回転させることにより、例えば第2部材21の姿勢を安定させることができる。
なお、翼部41の数は、1以上3以下でもよいし、5以上でもよい。複数の翼部41の間隔は、等間隔でもまた不等間隔でも構わない。翼部41は、流入口27と本体部40の縁端との間の本体部40の表面に配置されていてもよいし、流出口28と本体部40の縁端との間の本体部40の表面に配置されていてもよい。翼部41は、流入口27と流出口28との間に配置されていても構わない。また、翼部41は、吹出口24からの流体G以外の流体を受けて、上記の回転力を発生しても構わない。本例において、表面検出装置9Gは、翼部41が上記の回転力を発生させるように、翼部41に流体を供給する装置を含んでもよい。また、本例において、第2部材21Fは、流体から受ける力以外の力によって、流出口28から流出する流体Gの流れ方向の周りに回転可能でもよい。例えば、第2部材21Fは、流体力、静電気力、及び磁力の1以上を受けて、回転可能でもよい。
図9(a)は、変形例7における第2部材の平面図、図9(b)は図9(a)のD−D’線断面図、図9(c)は図9(a)のE−E’線断面図である。変形例7における第2部材21Hは、第1溝部42及び第2溝部43を含む。本例では、第1溝部42及び第2溝部43は、第2部材21Hにおいて第1部材20に向く上面30に配置されている。本例において、第1溝部42及び第2溝部43は、それぞれ、Z方向に対する放射方向に延びている。本例において、第1溝部42は、第2溝部43と交差して延びている。本例において、第1溝部42及び第2溝部43は、流入口27に通じている。
なお、第1溝部42及び第2溝部43の一方は、設けられていなくとも構わない。第1溝部42及び第2溝部43の少なくとも一方は、流入口27と交わらなくとも構わない。第1溝部42及び第2溝部43の少なくとも一方は、上記の放射方向に曲線的に延びる部分を含んでもよい。第1溝部42及び第2溝部43の他に、他の溝部が設けられてもよい。他の溝部は、第2部材21Hにおいて上面30とは異なる方向を向く面、例えば基板Pの表面を向く下面に設けられていてもよいし、上面30及び下面の双方に設けられていてもよい。上面30とは異なる方向を向く面に他の溝部が設けられている場合に、第1溝部42と第2溝部43の少なくとも一方は、省略可能である。他の溝部は、流出口28に通じていてもよいし、通じていなくとも構わない。
本例において、第1溝部42の底部42aの少なくとも一部は、第2部材21Hの上面30と段差を有する。本例において、第1溝部42の底部の少なくとも一部は、第2部材21Hの上面30と段差を有する。本例において、例えば図2に示した第1部材20の吹出口24から吹出された流体Gは、第1溝部42及び第2溝部43の内側を流れる。本例において、流体Gは、第1溝部42の内側を、第1溝部42の延在方向に沿って流れる。本例において、流体Gは、第2溝部43の内側を、第2溝部43の延在方向に沿って流れる。本例の表面検出装置は、例えば、第2部材21Hの周囲の流体Gの流れを制御することができ、例えば第2部材21Hの周囲の流体Gの流れを安定させることができる。
なお、第1溝部42、第2溝部43、及び他の溝部の1以上の内側を流体Gが流れなくとも構わない。流体Gは、第1溝部42、第2溝部43、及び他の溝部の1以上について、溝部の延在方向と交差して流れても構わない。本例では、第2部材21Hに溝部が設けられているが、例えば例えば図2に示した第1部材20において、第2部材21に向く面に溝部が設けられていてもよい。
図10(a)は、変形例8における第2部材の平面図、図10(b)は図10(a)F−F’線断面図である。変形例8における第2部材21Jは、第1溝部42、第2溝部43、及び第3溝部44を含む。本例では、第3溝部44は、第2部材21Hにおいて第1部材20に向く上面30に配置されている。本例において、第3溝部44は、流出口28から流出する流体Gの流れ方向(Z方向)の周りの周方向に延びている。本例において、第3溝部44の底部44aの少なくとも一部は、第2部材21Jの上面30と段差を有し、かつ第1溝部42の底部42aと段差を有する。本例において、第3溝部44の底部44aの少なくとも一部は、上面30に対して、第1溝部42の底部42aよりも窪んでいる。
なお、本例において、第2部材21Jは、Z方向に対する放射方向に延びる第1溝部42及び第2溝部43と、Z方向周りの周方向に延びる第3溝部44とを有しているが、第1溝部42及び第2溝部43の少なくとも一方は、設けられていなくとも構わない。また、第3溝部44は、上面30とは異なる方向を向く面、例えば基板Pの表面を向く下面に設けられていてもよいし、上面30及び下面の双方に設けられていてもよい。
なお、上記の例で説明した表面検出装置あるいは表面検出方法は、その検出結果を露光以外の処理に利用してもよいし、露光対象の基板以外の物体の表面を検出することに利用してもよい。例えば、製造過程のデバイス(中間体)の検査、あるいは、製造されたデバイスの検査を行う装置として、上記の例で説明した表面検出装置を備える検査装置を利用してもよい。
なお、液浸露光装置において、例えば国際公開第2004/019128号パンフレットに開示されているように、投影光学系PLの射出面に対して入射側(物体面側)の光路も露光用の液体LQ1で満たされる投影光学系PLを採用することができる。露光用の液体LQ1は、水以外の液体であってもよい。液体LQ1は、露光光ELに対して透過性であり、露光光ELに対して高い屈折率を有し、投影光学系PLあるいは基板Pの表面を形成する感光材(フォトレジスト)などの膜に対して安定なものが好ましい。例えば、液体LQ1として、ハイドロフロロエーテル(HFE)、過フッ化ポリエーテル(PFPE)、フォンブリンオイル等を用いることも可能である。また、液体LQ1、例えば超臨界流体を用いることも可能である。
露光装置EXとしては、スキャニングステッパの他に、マスクMと基板Pとを静止した状態でマスクMのパターンを一括露光し、基板Pを順次ステップ移動させるステップ・アンド・リピート方式の投影露光装置(ステッパ)にも適用することができる。ステップ・アンド・リピート方式の露光において、第1パターンと基板Pとをほぼ静止した状態で、投影光学系を用いて第1パターンの縮小像を基板P上に転写した後、第2パターンと基板Pとをほぼ静止した状態で、投影光学系を用いて第2パターンの縮小像を第1パターンと部分的に重ねて基板P上に一括露光してもよい(スティッチ方式の一括露光装置)。スティッチ方式の一括露光装置は、基板P上で少なくとも2つのパターンを部分的に重ねて転写し、基板Pを順次移動させるステップ・アンド・スティッチ方式でもよい。例えば米国特許第6611316号明細書に開示されているように、2つのマスクのパターンを、投影光学系を介して基板上で合成し、1回の走査露光によって基板上の1つのショット領域をほぼ同時に二重露光する露光装置などにも本発明を適用することができる。プロキシミティ方式の露光装置、ミラープロジェクション・アライナーなどにも本発明を適用することができる。
露光装置EXは、例えば米国特許第6897963号明細書、及び欧州特許出願公開第1713113号明細書等に開示されているような基板ステージと計測ステージとを備えた露光装置でもよい。この計測ステージに搭載される計測部材は、例えば米国特許出願公開第2002/0041377号明細書等に開示されているような空間像計測システムの一部を構成する部材でもよいし、米国特許第4465368号明細書等に開示されているような照度むら計測システムの一部を構成する部材でもよいし、米国特許第5493403号明細書等に開示されているような基準部材でもよいし、米国特許出願公開第2002/0061469号明細書等に開示されているような照射量計測システムの一部を構成する部材でもよいし、欧州特許第1079223号明細書等に開示されているような波面収差計測システムの一部を構成する部材でもよい。上記の例で説明した表面検出装置は、計測ステージに配置されていてもよい。計測ステージに、例えば光学的に基板の表面を検出する光学検出装置が配置されている場合に、光学検出装置の検出結果を、上記の例で説明した表面検出装置の検出結果と比較してもよく、検出の成否の判定や互いの検出結果の相互補間等に利用してもよい。
露光装置EXは、米国特許第6341007号明細書、米国特許第6208407号明細書、米国特許第6262796号明細書等に開示されているような、計測ステージを備えておらず、複数の基板ステージを備えたツインステージ型の露光装置でもよい。その場合、複数の基板ステージのうち、任意の基板ステージに上記の例で説明した表面検出装置を配置してもよい。
基板Pの基材は、半導体デバイス製造用の半導体ウエハのみならず、ディスプレイデバイス用のガラス基板、薄膜磁気ヘッド用のセラミックウエハ、あるいは露光装置で用いられるマスクまたはレチクルの原版(合成石英、シリコンウエハ)等であってもよい。露光装置EXの種類としては、基板Pに半導体素子パターンを露光する半導体素子製造用の露光装置や、液晶表示素子製造用又はディスプレイ製造用の露光装置、薄膜磁気ヘッド、撮像素子(CCD)、マイクロマシン、MEMS、DNAチップ、あるいはレチクル又はマスクなどを製造するための露光装置などにも広く適用できる。
上記の例では、干渉計を用いて各ステージの位置情報を計測するものとしたが、これに限らず、例えば各ステージに設けられるスケール(回折格子)を検出するエンコーダシステムを用いてもよい。
上記の例では、光透過性の基板上に所定の遮光パターン(又は位相パターン・減光パターン)を形成した光透過型マスクを用いたが、このマスクに代えて、例えば米国特許第6778257号明細書に開示されているように、露光すべきパターンの電子データに基づいて透過パターン又は反射パターン、あるいは発光パターンを形成する可変成形マスク(電子マスク、アクティブマスク、あるいはイメージジェネレータとも呼ばれる)を用いてもよい。また、非発光型画像表示素子を備える可変成形マスクに代えて、自発光型画像表示素子を含むパターン形成装置を備えるようにしても良い。
上記の例では、投影光学系PLを備えた露光装置を例に挙げて説明したが、投影光学系PLを用いない露光装置及び露光方法に本発明を適用することができる。例えば、レンズ等の光学部材と基板との間に液浸空間を形成し、その光学部材を介して、基板に露光光を照射することができる。また、例えば国際公開第2001/035168号パンフレットに開示されているように、干渉縞を基板P上に形成することによって、基板P上にライン・アンド・スペースパターンを露光する露光装置(リソグラフィシステム)にも本発明を適用することができる。
上記の例の露光装置EXは、本願請求の範囲に挙げられた各構成要素を含む各種サブシステムを、所定の機械的精度、電気的精度、光学的精度を保つように、組み立てることで製造される。これら各種精度を確保するために、この組み立ての前後には、各種光学系については光学的精度を達成するための調整、各種機械系については機械的精度を達成するための調整、各種電気系については電気的精度を達成するための調整が行われる。各種サブシステムから露光装置への組み立て工程は、各種サブシステム相互の、機械的接続、電気回路の配線接続、気圧回路の配管接続等が含まれる。この各種サブシステムから露光装置への組み立て工程の前に、各サブシステム個々の組み立て工程があることはいうまでもない。各種サブシステムの露光装置への組み立て工程が終了したら、総合調整が行われ、露光装置全体としての各種精度が確保される。なお、露光装置の製造は温度およびクリーン度等が管理されたクリーンルームで行うことが望ましい。
上記の各例の要件は、適宜組み合わせることができる。また、一部の構成要素を用いない場合もある。また、法令で許容される限りにおいて、上記の例で引用した露光装置などに関する全ての公開公報及び米国特許の開示を援用して本文の記載の一部とする。
<第2実施形態>
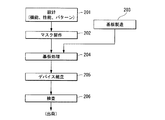
図11は、第2実施形態のデバイス製造方法の一例を示すフローチャートである。半導体デバイス等のマイクロデバイスは、マイクロデバイスの機能・性能設計を行うステップ201、この設計ステップに基づいたマスク(レチクル)を製作するステップ202、デバイスの基材である基板を製造するステップ203、基板に成膜処理や露光処理、現像処理、エッチング処理等の各種基板処理を行う基板処理ステップ204、デバイス組立ステップ205、検査ステップ206等を経て製造される。
基板処理ステップ204は、上記の実施形態に従って露光対象の基板の表面を検出すること(以下、第1検出処理という)、露光光で基板を露光すること、及び露光された基板を現像することを含む。本例の基板処理ステップ204は、露光対象の基板に検出光を照射して基板の表面を光学的に検出すること(以下、第2検出処理という)と、第1検出処理の検出結果と第2検出処理の検出結果とを比較することとを含む。第2検出処理は、基板の露光前に行ってもよいし、基板の一部の露光と並行して行ってもよい。例えば、基板に複数の膜(層)が積層されている場合に、第2検出処理において基板に照射された検出光の一部が、各層で屈折あるいは反射することがありえる。すると、実際の基板の表面と異なる位置、例えば各層の界面の位置が、基板の表面の位置として検出されることがありえる。また、第2検出処理の結果において、基板の表面の位置として複数の位置が検出されることもありえる。本例では、第1検出処理の検出結果と第2検出処理の検出結果とを比較して、基板の表面の位置を決定する。なお、表面を検出する基板上の検出箇所の間隔を、第2検出処理において第1検出処理よりも狭く設定してもよい。例えば、第1検出処理において第1解像度で基板の表面を検出し、第2検出処理において第1解像度よりも高い第2解像度で基板の表面を検出してもよい。また、第1解像度で検出した検出結果と、第2解像度で検出した検出結果とを相互補間してもよい。本例の基板処理ステップ204では、基板の表面を検出した検出結果に基づいて基板の表面に光学系の焦点をあわせた状態で、この光学系を介して基板にパターンの像を投影して露光する。デバイス組立ステップ205は、ダイシング工程、ボンディング工程、パッケージ工程などの加工プロセスを含む。検査ステップ206で、上記の実施形態で説明した表面検出装置あるいは表面検出方法を用いて、製造されたデバイスを検査してもよい。また、デバイス製造過程中の適宜選択されるタイミングで、上記の実施形態で説明した表面検出装置あるいは表面検出方法を用いて、製造過程のデバイスを検査してもよい。