JP2011183865A - 車両の運動制御装置 - Google Patents
車両の運動制御装置 Download PDFInfo
- Publication number
- JP2011183865A JP2011183865A JP2010049097A JP2010049097A JP2011183865A JP 2011183865 A JP2011183865 A JP 2011183865A JP 2010049097 A JP2010049097 A JP 2010049097A JP 2010049097 A JP2010049097 A JP 2010049097A JP 2011183865 A JP2011183865 A JP 2011183865A
- Authority
- JP
- Japan
- Prior art keywords
- vehicle
- actual
- unit
- side slip
- control
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Granted
Links
- 230000033001 locomotion Effects 0.000 title claims abstract description 105
- 230000001133 acceleration Effects 0.000 claims abstract description 57
- 238000004364 calculation method Methods 0.000 claims description 126
- 238000001514 detection method Methods 0.000 claims description 54
- 230000006866 deterioration Effects 0.000 abstract 1
- 238000012545 processing Methods 0.000 description 45
- 238000012821 model calculation Methods 0.000 description 22
- 230000005540 biological transmission Effects 0.000 description 18
- 230000006870 function Effects 0.000 description 17
- 230000005484 gravity Effects 0.000 description 17
- 238000000034 method Methods 0.000 description 16
- 238000010586 diagram Methods 0.000 description 11
- 230000015572 biosynthetic process Effects 0.000 description 8
- 238000003786 synthesis reaction Methods 0.000 description 8
- 238000006243 chemical reaction Methods 0.000 description 7
- 230000007423 decrease Effects 0.000 description 7
- 230000007246 mechanism Effects 0.000 description 6
- 230000008859 change Effects 0.000 description 5
- 238000012937 correction Methods 0.000 description 5
- 230000003247 decreasing effect Effects 0.000 description 5
- 230000008569 process Effects 0.000 description 5
- 230000009467 reduction Effects 0.000 description 5
- 238000000926 separation method Methods 0.000 description 5
- 239000002131 composite material Substances 0.000 description 4
- 230000004069 differentiation Effects 0.000 description 3
- 230000004048 modification Effects 0.000 description 3
- 238000012986 modification Methods 0.000 description 3
- 230000008054 signal transmission Effects 0.000 description 3
- 230000007935 neutral effect Effects 0.000 description 2
- 230000002194 synthesizing effect Effects 0.000 description 2
- 238000013459 approach Methods 0.000 description 1
- 238000004891 communication Methods 0.000 description 1
- 238000005516 engineering process Methods 0.000 description 1
- 230000007257 malfunction Effects 0.000 description 1
- 239000000203 mixture Substances 0.000 description 1
- 238000007639 printing Methods 0.000 description 1
- 230000004044 response Effects 0.000 description 1
- 230000004043 responsiveness Effects 0.000 description 1
- 230000001629 suppression Effects 0.000 description 1
- 230000002123 temporal effect Effects 0.000 description 1
Images





Classifications
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W10/00—Conjoint control of vehicle sub-units of different type or different function
- B60W10/04—Conjoint control of vehicle sub-units of different type or different function including control of propulsion units
- B60W10/06—Conjoint control of vehicle sub-units of different type or different function including control of propulsion units including control of combustion engines
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W10/00—Conjoint control of vehicle sub-units of different type or different function
- B60W10/10—Conjoint control of vehicle sub-units of different type or different function including control of change-speed gearings
- B60W10/11—Stepped gearings
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W10/00—Conjoint control of vehicle sub-units of different type or different function
- B60W10/18—Conjoint control of vehicle sub-units of different type or different function including control of braking systems
- B60W10/184—Conjoint control of vehicle sub-units of different type or different function including control of braking systems with wheel brakes
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W10/00—Conjoint control of vehicle sub-units of different type or different function
- B60W10/20—Conjoint control of vehicle sub-units of different type or different function including control of steering systems
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W30/00—Purposes of road vehicle drive control systems not related to the control of a particular sub-unit, e.g. of systems using conjoint control of vehicle sub-units
- B60W30/02—Control of vehicle driving stability
- B60W30/025—Control of vehicle driving stability related to comfort of drivers or passengers
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W50/00—Details of control systems for road vehicle drive control not related to the control of a particular sub-unit, e.g. process diagnostic or vehicle driver interfaces
- B60W2050/0001—Details of the control system
- B60W2050/0019—Control system elements or transfer functions
- B60W2050/0028—Mathematical models, e.g. for simulation
- B60W2050/0031—Mathematical model of the vehicle
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W2520/00—Input parameters relating to overall vehicle dynamics
- B60W2520/10—Longitudinal speed
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W2520/00—Input parameters relating to overall vehicle dynamics
- B60W2520/12—Lateral speed
- B60W2520/125—Lateral acceleration
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W2540/00—Input parameters relating to occupants
- B60W2540/10—Accelerator pedal position
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W2540/00—Input parameters relating to occupants
- B60W2540/12—Brake pedal position
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W2540/00—Input parameters relating to occupants
- B60W2540/18—Steering angle
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W2720/00—Output or target parameters relating to overall vehicle dynamics
- B60W2720/14—Yaw
-
- Y—GENERAL TAGGING OF NEW TECHNOLOGICAL DEVELOPMENTS; GENERAL TAGGING OF CROSS-SECTIONAL TECHNOLOGIES SPANNING OVER SEVERAL SECTIONS OF THE IPC; TECHNICAL SUBJECTS COVERED BY FORMER USPC CROSS-REFERENCE ART COLLECTIONS [XRACs] AND DIGESTS
- Y02—TECHNOLOGIES OR APPLICATIONS FOR MITIGATION OR ADAPTATION AGAINST CLIMATE CHANGE
- Y02T—CLIMATE CHANGE MITIGATION TECHNOLOGIES RELATED TO TRANSPORTATION
- Y02T10/00—Road transport of goods or passengers
- Y02T10/10—Internal combustion engine [ICE] based vehicles
- Y02T10/40—Engine management systems
Landscapes
- Engineering & Computer Science (AREA)
- Chemical & Material Sciences (AREA)
- Combustion & Propulsion (AREA)
- Transportation (AREA)
- Mechanical Engineering (AREA)
- Automation & Control Theory (AREA)
- Control Of Driving Devices And Active Controlling Of Vehicle (AREA)
- Regulating Braking Force (AREA)
- Retarders (AREA)
Abstract
【解決手段】車両の運動制御装置は、コントロールユニット37、並びに、センサ2,3,4,30,31,32,33等を含んで構成されている。実状態量取得部52は、実車体横滑り角βz_act等を演算する。規範動特性モデル演算部54は、動特性モデルを用いて、規範車体横滑り角βz_d等を演算する。そのほかに実車体横滑り角βz_actにもとづいて第1のアンチスピン・目標ヨーモーメントMc1_aspを演算する第1のアンチスピン目標ヨーモーメントFB部68、横方向加速度Gs、車速Vact、実ヨーレートγactにもとづいて第2のアンチスピン・目標ヨーモーメントMc2_aspを演算する第2のアンチスピン目標ヨーモーメントFB部82を有している。
【選択図】図2
Description
同様に車体横滑り角にもとづいて左右の車輪の制動力を制御して、ヨーモーメントを制御する制動装置や、車体横滑り角にもとづいて前輪転舵角を補正制御する技術が知られている。
また、後輪軸の横滑り角及び横滑り角速度から目標ヨーモーメントを演算し、左右の車輪の制動力を制御して、車両のヨーモーメントを制御する制動装置が特許文献2により知られている。
横方向加速度及び実ヨーレートにもとづいて車体横滑り角速度を演算する車体横滑り角速度演算手段をさらに備え、アクチュエータ制御手段は、車体横滑り角速度、車両の実姿勢状態量、及び偏差の内の少なくとも1つにもとづき、アクチュエータの制御目標量を決定することを特徴とする。
横方向加速度及び実ヨーレートにもとづいて車体横滑り角速度を演算する車体横滑り角速度演算手段と、車両の実姿勢状態量にもとづき第1の制御目標ヨーモーメントを決定する第1制御目標ヨーモーメント演算手段と、車体横滑り角速度にもとづき第2の制御目標ヨーモーメントを決定する第2制御目標ヨーモーメント演算手段と、第1の制御目標ヨーモーメントと第2の制御目標ヨーモーメントとを比較して高値の方を選択する高値選択手段を備え、高値選択手段は、第1及び第2の制御目標ヨーモーメントの内の高値の方を選択してアクチュエータ制御手段に送出し、アクチュエータ制御手段は、高値選択手段により選択された第1及び第2の制御目標ヨーモーメントの内の高値の方にもとづいてアクチュエータの制御目標量を決定することを特徴とする。
実車体横滑り角推定精度判別手段が判定する前記実車体横滑り角の確からしさに応じて車体横滑り角速度の出力を可変とするよう構成されることを特徴とする。
図1は第1の実施形態に係る車両の運動制御装置を適用した車両の模式図である。図2は第1の実施形態に係る車両の運動制御装置における制御ロジックを説明するためのブロック機能構成図である。
車両1には、運転者が操作する操向ハンドル21aの操作量(車両の操作状態量)を検出する操作角検出センサ(操作状態検知手段)21c、図示しないセレクトレバーの選択位置(車両の操作状態量)を検出するセレクトレバーポジションセンサ(操作状態検知手段)2、図示しないアクセルペダルの踏み込み量(車両の操作状態量)を検出するアクセルペダルポジションセンサ(操作状態検知手段)3、図示しないブレーキペダルの踏み込み量(車両の操作状態量)を検出するブレーキペダルポジションセンサ(操作状態検知手段)4が設けられている。
また、車両1は、車両1の運動制御装置として、コントロールユニット(車両の運動制御装置)37A、前輪操舵装置SBWの制御部である転舵角制御装置40、その他各種のセンサ、例えば、各車輪WfL,WfR,WrL,WrRの車輪速(車両の運動状態量)を検出する車輪速センサ(運動状態検知手段)30fL,30fR,30rL,30rR、車両1の実ヨーレート(車両の運動状態量)γactを検出するヨーレートセンサ(運動状態検知手段)31、車両1の横方向加速度(車両の運動状態量)Gsを検出する横方向加速度センサ(運動状態検知手段)32、車両1の前後方向加速度(車両の運動状態量)αを検出する前後方向加速度センサ(運動状態検知手段)34等を備えている。
本実施形態では、前記したAYC機能における特徴に注目して説明をする。そのため、図2に示すコントロールユニット37Aの機能ブロック構成図には、ABSの機能の機能ブロック、TCS機能の機能ブロックは省略してある。
AYC機能のためにコントロールユニット37Aは、転舵時の運動制御のために油圧回路28を介して駆動力伝達装置Tを制御したり、転舵時の運動制御のために各車輪のブレーキBfL,BfR,BrL,BrRをブレーキ制御ECU(Electric Control Unit)29を介して制御したりする。
まず、本実施形態の車両の運動制御装置を適用する車両1の動力伝達系について説明する。車体前部に横置きに搭載したエンジンENGの右端にトランスミッシヨンT/Mが接続されており、これらエンジンENG及びトランスミッションT/Mの後部に駆動力伝達装置Tが配設される。駆動力伝達装置Tの左端及び右端から左右に延出する左ドライブシャフトAL及び右ドライブシャフトARには、それぞれ駆動輪である左前輪WfL及び右前輪WfRが接続される。
そして、駆動力伝達装置Tの遊星歯車機構は、コントロールユニット37Aにより油圧回路28を介して制御される左油圧クラッチCL及び右油圧クラッチCRを含んでいる。
車両1の直進走行時には左油圧クラッチCL及び右油圧クラッチCRが共に非係合状態とされる。車両1の右旋回時には、コントロールユニット37Aに油圧回路28が制御されて、右油圧クラッチCRの係合力が適宜調整されることによって、左前輪WfLの回転速度は右前輪WfRの回転速度に対して増速される。左前輪WfLの回転速度が右前輪WfRの回転速度に対して増速されると、旋回内輪である右前輪WfRのトルクの一部を旋回外輪である左前輪WfLに伝達することができる。
一方、車両1の左旋回時には、コントロールユニット37Aに油圧回路28が制御されて、左油圧クラッチCLの係合力が適宜調整されて、右前輪WfRの回転速度は左前輪WfLの回転速度に対して増速される。右前輪WfRの回転速度が左前輪WfLの回転速度に対して増速されると、旋回内輪である左前輪WfLのトルクの一部を旋回外輪である右前輪WfRに伝達することができる。
次に、本実施形態における前輪操舵装置の構成を説明する。
この前輪操舵装置SBWは、ステアバイワイヤを実現するものであり、運転操作装置である操作部21と、ステアリング装置機構である転舵部25と、転舵部25を制御する転舵角制御装置40とを含んでなる。
操作部21は運転者が操作する操向ハンドル21aを備え、この操向ハンドル21aの操作角θを転舵角制御装置40で処理し、この処理結果にもとづいて転舵部25のステアリングモータ25aを駆動させて転舵輪である左右の前輪WfL,WfRを転舵する。
なお、直線運動時のラック軸25cの位置は、転舵部25に設けられた転舵角センサ(操作状態検知手段)33によって転舵角δ(車両の操作状態量)として検出され、転舵角制御装置40にフィードバックされている。
コントロールユニット37Aの車速演算部(運動状態検知手段)52a(図2参照)では、入力された車輪速から車速Vactを演算して、転舵角制御装置40に車速Vactを入力する。
また、各車輪WfL,WfR,WrL,WrRには、ブレーキBfL,BfR,BrL,BrRが設けられ、ブレーキ制御ECU29により制御される。
ここで、左油圧クラッチCL、右油圧クラッチCR、ブレーキBfL,BfR,BrL,BrRが、特許請求の範囲に記載の「アクチュエータ」に対応する。
転舵角制御装置40は、CPU(Central Processing Unit)、ROM(Read Only Memory)、RAM(Random Access Memory)及び所定の電気回路を備えたECU(電子制御ユニット)から構成され、図1に示すように、操作部21及び転舵部25とは信号伝達ケーブルを介して電気的に連結されている。
転舵角制御装置40は、操作部21の操作角検出センサ21c、操作トルクセンサ21dからの検出信号と、車速演算部52a(図2参照)からの車速Vactの信号を受け取り、前輪WfL,WfRの向くべき前輪目標転舵角を設定し、また、操作部21の操作反力モータ21eの制御を行なう目標転舵角設定・操作反力制御部40aと、ステアリングモータ25aを駆動させるステアリングモータ制御部40bを含んで構成されている。
転舵角制御装置40の構成は、例えば、特開2004−224238号公報の図2に示されているものと同様である。
次に、油圧回路28を介して駆動力伝達装置Tによる左右の前輪WfL,WfRそれぞれへの駆動トルクを制御したり、ブレーキ制御ECU29を介して各車輪WfL,WfR,WrL,WrRそれぞれの制動力を制御したりして、車両1の重心回りのヨーモーメントを制御するコントロールユニット37Aにおける機能ブロック構成を、図2を参照しながら、適宜、図1を参照して説明する。
なお、ここでは、エンジンECU27は、トランスミッションT/Mの減速比を制御する機能も有しているとしている。
FF目標値設定部51は、操向ハンドル21aの操作角θや、セレクトレバーの選択位置や、アクセルペダルの踏み込み量やブレーキペダルの踏み込み量等の運転操作入力(車両の操作状態量)、実状態量取得部52の車速演算部52aで演算された車速Vact(車両の運動状態量)を読み込み、ブレーキBfl,BfR,BrL,BrRや、左右油圧クラッチCL,CR、トランスミッション減速比等のそれぞれのFF目標値を設定する。
このFF目標値設定部51は、例えば、前記特許文献3の段落[0372]〜[0377]及び図17に記載のように、制動力の車輪WfL,WfR,WrL,WrRへのFF目標値、駆動力の左右前輪WfL,WfRへのFF目標値を設定する。FF目標値とは、具体的には、車輪WfLに対して、ブレーキBfLによるFF目標第1輪ブレーキ駆動・制動力を、輪WfRに対して、ブレーキBfRによるFF目標第2輪ブレーキ駆動・制動力を、後輪WrLに対して、ブレーキBrLによるFF目標第3輪ブレーキ駆動・制動力を、後輪WrRに対して、ブレーキBrRによるFF目標第4輪ブレーキ駆動・制動力を演算設定する。
また、FF目標値として、前輪WfLに対して、左油圧クラッチCLによるFF目標第1輪駆動系駆動・制動力を、前輪WfRに対して、右油圧クラッチCRによるFF目標第2輪駆動系駆動・制動力を演算設定する。さらに、FF目標値として、トランスミッションT/MのFF目標ミッション減速比を演算設定しても良い。
次に、実状態量取得部52は、セレクトレバーポジションセンサ2からの選択位置信号、アクセルペダルポジションセンサ3からの踏み込み量を示す信号、ブレーキペダルポジションセンサ4からの踏み込み量を示す信号、操作角検出センサ21cからの操向ハンドル21aの操作角θを示す信号、ヨーレートセンサ31から車両1の実ヨーレートγactを示す信号、横方向加速度センサ32から車両1の横方向加速度Gsを示す信号、前後方向加速度αを示す信号、4つの車輪速センサ30(図1では本実施形態では、30fL,30fR,30rL,30rRと表示)からの各車輪速Vwを示す信号、転舵角センサ33からの転舵角δを示す信号等を取得する。
実状態量取得部52は、機能ブロックとして、さらに、車速演算部(運動状態検知手段)52a、摩擦係数推定演算部(運動状態検知手段、路面摩擦係数推定手段)52b、実車体横滑り角演算部(実姿勢状態決定手段)52c、実前輪横滑り角演算部(実姿勢状態決定手段)52d、実後輪横滑り角演算部(実姿勢状態決定手段)52e、実横滑り角速度演算部(実姿勢状態決定手段)52f、推定精度判別部(推定精度判別手段、優先度選択手段)52g、タイヤ特性設定部(実姿勢状態決定手段)52iを有している。
なお、実状態量取得部52は、ヨーレートセンサ31からの検知信号を取得して、中点学習をして、左右のヨーレートが発生していない状態をゼロ点として補正された実ヨーレートγactを、実状態量取得部52の他の機能ブロックに出力する機能ブロックとしてのヨーレート中点学習補正部や、転舵角センサ33からの検知信号を取得して、中点学習をして、中立状態(車両1の直進状態)をゼロ点として補正された転舵角δを、実状態量取得部52の他の機能ブロックに出力する機能ブロックとしての転舵角中点学習補正部等も有しているが、図2では省略してある。
ちなみに、中点学習をして補正された実ヨーレートγactは偏差演算部55に入力される。
車速演算部52aは、例えば、特開2000−85558号公報に開示されているように公知の方法を用い、車輪速センサ30からの各車輪速Vw等にもとづいて車速Vact(車両の運動状態量)を演算する。特に、ブレーキペダルが操作されていないときは、従動輪である後輪WrL,WrRの車輪速センサ30rL,30rRの示す各車輪速Vwの平均値が車速Vactである。車速演算部52aは、車輪速センサ30からの各車輪速Vwと車速Vactから各車輪Wのスリップ率も演算する。
本実施形態は、車速Vactを車輪速センサ30fL,30fR,30rL,30rRから算出することに限定されず、車両1が車輪速センサ30fL,30fR,30rL,30rRとは別に、対地速度を直接検出する公知の車速センサを備え、実状態量取得部52が車速センサから車速Vactを示す信号を取得する構成としても良い。
摩擦係数推定演算部52bは、例えば、特開2000−85558号公報に開示されているように公知の方法を用い、横方向加速度Gs、実ヨーレートγact、タイヤ特性設定部52iからの各車輪Wごとのタイヤ特性(実車輪横すべり角−コーナリングフォース特性、車輪Wのスリップ率−コーナリングフォース減少率特性、車輪Wのスリップ率−制・駆動特性)、車輪スリップ率、実前輪横滑り角演算部52dで演算された前輪の横滑り角βf_act、実後輪横滑り角演算部52eで演算された、後輪WrL,WrRの横滑り角βr_act等にもとづいて車両の運動状態量のパラメータの1つである路面の摩擦係数μを推定演算する。
ちなみに、タイヤ特性設定部52iは、例えば、特開2000−85558号公報の段落[0013]及び図3に開示されているタイヤ特性設定手段12に対応する。
なお、摩擦係数推定演算部52bは、特開2007−145075号公報の段落[0029]〜[0032]に開示されているように、各車輪WのブレーキBfL,BfR,BrL,BrRの各液圧Pから各車輪Wの制動力を演算し、各車輪Wの制動力、各車輪Wの角速度、車輪Wの半径、車輪Wの慣性モーメント、各車輪Wの接地荷重にもとづいて路面の摩擦係数μを推定演算しても良い。
実車体横滑り角演算部52cは、例えば、特開2000−85558号公報に開示されているように公知の方法を用い、転舵角δ、実ヨーレートγact、横方向加速度Gs、車速Vact、各車輪Wのスリップ率等にもとづいて公知の方法で実車体横滑り角(車両の実姿勢状態量)βz_actを推定演算する。ここ各車輪Wので実車体横滑り角βz_actは、図3に示すように車両1の重心回りの車体横滑り角であり、車体スリップ角とも言われる。ここでは、前記した規範動特性モデル演算部54において演算される重心回りの車体横滑り角である規範車体横滑り角βz_dと区別するために実車体横滑り角βz_actと称する。
実車体横滑り角演算部52cにおいて推定演算された実車体横滑り角βz_actは、偏差演算部55に入力される。
実前輪横滑り角演算部52dは、前輪WfL,WfRの実横滑り角βf_act(以下、単に「前輪実横滑り角(車両の実姿勢状態量)βf_act」と称する)を、実車体横滑り角βz_act、実ヨーレートγact、車速Vact、転舵角δにもとづいて公知の方法で演算する。また、実後輪横滑り角演算部52eは、後輪WrL,WrRの実横滑り角βr_act(以下、単に「後輪実横滑り角(車両の実姿勢状態量)βr_act」と称する)を、実車体横滑り角βz_act、実ヨーレートγact、車速Vactにもとづいて公知の方法で演算する。
例えば、次式(1)のように前輪実横滑り角βf_actは演算でき、次式(2)のように後輪実横滑り角βr_actは演算できる。
βf_act=βz_act+Lf・γact/Vact−δ ・・・・(1)
βr_act=βz_act−Lr・γact/Vact ・・・・・・(2)
ここで、Lfは、車両1の重心と前輪WfL,WfRのドライブシャフトAL,ARとの前後方向距離であり、Lrは、車両1の重心と後輪WrL,WrRの回転軸との前後方向距離である(図3参照)。
実前輪横滑り角演算部52dで演算された前輪実横滑り角βf_actは、アクチュエータ動作目標値合成部59に入力される。
実後輪横滑り角演算部52eで演算された後輪実横滑り角βr_actは、加算部66およびアクチュエータ動作目標値合成部59に入力される。
実横滑り角速度演算部52fは、実車体横滑り角演算部52cで周期的に演算された前回の実車体横滑り角βz_actと今回の実車体横滑り角βz_actにもとづいて、時間微分し、第1の実車体横滑り角速度(車両の実姿勢状態量)β′z_actを演算する。実横滑り角速度演算部52fで演算された第1の実車体横滑り角速度β′z_actは、偏差演算部55に入力される。実横滑り角速度演算部52fが、第1の実車体横滑り角速度β′z_actを演算する意味では、第1の実車体横滑り角速度演算手段でもある。以下では、第1の実車体横滑り角速度β′z_actは、単に「実車体横滑り角速度β′z_act」と称する。
また、実横滑り角速度演算部52fは、実後輪横滑り角演算部52dで周期的に演算された前回の後輪実横滑り角βr_actと今回の後輪実横滑り角βr_actにもとづいて、時間微分し、後輪実横滑り角速度(車両の実姿勢状態量)β′r_actを演算する。実横滑り角速度演算部52fで演算された後輪実横滑り角速度β′r_actは、後輪実横滑り角補正部65に入力される。
推定精度判別部52gは、前記した各種センサ、セレクトレバーポジションセンサ2、アクセルペダルポジションセンサ3、ブレーキペダルポジションセンサ4、車輪速センサ30fL,30fR,30rL,30rR、ヨーレートセンサ31、横方向加速度センサ32、転舵角センサ33、前後方向加速度センサ34からの信号を監視し、例えば、操舵角が所定以上の状況下において、横方向加速度が小さいにも関わらず摩擦係数推定演算部52bの推定する摩擦係数μが大きい場合や、スリップ率が大きいにも関わらず摩擦係数μが大きい場合等は、実際の路面摩擦係数に対して摩擦係数推定演算部52bの出力に含まれる誤差が大きい可能性がある。
推定精度判別部52gが、例えば、摩擦係数推定演算部52bが推定した路面摩擦係数μおよび転舵舵角δ、車速Vactにもとづいて推定される推定横方向加速度Gs_est=Kc×μ(Kcは車両1緒元により決定されるゲイン)と、横方向加速度センサ32からの横方向加速度Gsにもとづいて、乖離が所定以上と判定した場合には、実路面摩擦係数が推定された路面摩擦係数μよりも小さい可能性がある。
推定精度判別部52gは、そのように乖離が所定以上と判定した場合には、実姿勢状態量の推定精度が低い、または利用不能であることを示す推定精度判別信号をFB目標値出力制御部62Aに出力する。
規範操作量決定部53は、前記した規範動特性モデル演算部54に対する入力としての規範モデル操作量を決定する。本実施形態では、規範操作量決定部53には、車両1の前輪Wfl,WfRの転舵角(以下、モデル転舵角δdという)である。このモデル転舵角δdを決定するために、操向ハンドル21a(図1参照)の操作角θ(今回値)が規範操作量決定部53に主たる入力量として入力されるとともに、実状態量取得部52によって演算された車速Vact(今回値)、及び推定摩擦係数μ(今回値)と、規範動特性モデル演算部54上での車両1の状態量(前回値)とが規範操作量決定部53に入力される。そのため、規範操作量決定部53は、規範動特性モデル演算部54上での車両1の状態量を一時保持する前回状態量保持部53aを有している。
ちなみに、規範操作量決定部53は、特許第4143111号公報の段落[0127]〜[0129]等に記載されている「規範操作量決定部14」に対応する。
次に、図2、図3を参照しながら規範動特性モデル演算部54について説明する。図3は、車両1の動特性モデルにおいて考えるモデル車両1d上の符号の説明図である。
規範動特性モデル演算部54は、車両1の規範とする運動の状態量である規範姿勢状態量をあらかじめ定められた車両動特性モデルを用いて決定して出力する。車両動特性モデルは、車両1の動特性を表し、前記した規範モデル操作量を含む所要の入力をもとに、規範姿勢状態量を逐次演算する。この車両1の規範とする運動は、基本的には、運転者にとって好ましいと考えられる車両1の理想的な運動もしくはそれに近い運動を意味する。
本実施形態における規範動特性モデルを、図3を参照して簡単に説明する。図3は本実施形態における規範動特性モデル上のモデル車両の説明図である。モデル車両1dは、車両1の動特性を、1つの前輪Wfと1つの後輪Wrとを前後に備えた車両1の水平面上での動特性(動力学特性)によって表現するモデル(いわゆる2輪モデル)である。モデル車両1dの前輪Wfは、実際の車両1の2つの前輪WfL,WfRを一体化した車輪Wfに相当し、モデル車両1dの転舵輪である。後輪Wrは、実際の車両1の後輪WrL,WrRを一体化した車輪Wrに相当し、本実施形態では非転舵輪である。
このモデル車両1dは、公知のものであり、前記しなかった符号の説明だけし、詳細な説明は省略する。
なお、この式(3)の右辺の第3項(Mvを含む項)を除いた式は、例えば「自動車の運動と制御」と題する公知の文献(著者:安部正人、発行者:株式会社山海堂、平成15年4月10日第2版第1刷発行。以降、非特許文献1という)に記載されている公知の式(3.12),(3.13)と同等である。

m:モデル車両1dの総質量
Kf:モデル車両1dの前輪Wfを2つの左右の前輪WfL,WfR(図1参照)の連
結体とみなしたときの1輪当たりのコーナリングパワー
Kr:モデル車両1dの後輪Wrを2つの左右の後輪WrL,WrR(図1参照)の連
結体とみなしたときの1輪当たりのコーナリングパワー
Lf:モデル車両1dの前輪Wfの中心と重心点CGとの前後方向の距離
Lr:モデル車両1dの後輪Wrの中心と重心点CGとの前後方向の距離
I:モデル車両1dの重心点CGにおけるヨー軸まわりの慣性モーメント
である。
これらのパラメータの値は、あらかじめ設定された値である。この場合、例えば、m,I,Lf,Lrは、車両1におけるそれらの値と同一か、もしくはほぼ同一に設定される。また、Kf,Krは、それぞれ車両1の前輪WfL,WfR,後輪WrL,WrRのタイヤの特性を考慮して設定される。
なお、式(3)においてd(βz_d)/dtは、モデル車両1dの規範車体横滑り角速度β′z_dのことである。
次に、図2に戻って偏差演算部55について説明する。偏差演算部55は、実状態量取得部52から入力された実姿勢状態量である実ヨーレートγact、実車体横滑り角βz_act、実車体横滑り角速度β′z_actと、規範動特性モデル演算部54から入力された規範姿勢状態量である規範ヨーレートγd、規範車体横滑り角βz_d、規範車体横滑り角速度β′z_dそれぞれの偏差γerr,βerr,β′errを演算してフィードバック目標値演算部56及び仮想外力演算部61に入力する。ここで、偏差γerr,βerr,β′errはそれぞれ次式(4),(5),(6)により演算する。
γerr=γact−γd ・・・・・・・・・・・・・・・・・(4)
βerr=βz_act−βz_d ・・・・・・・・・・・・・・(5)
β′err=β′z_act−β′z_d ・・・・ ・・・・・・(6)
FB目標値演算部56は、偏差γerr,βerr,β′errにもとづいて車両1の重心点回りのヨーモーメント制御を、前輪WfL,WfR、後輪WrL,WrRに対する左右の制動力の配分でブレーキ制御ECU29を介して行う、または、駆動輪である前輪WfL,WfRの左右の駆動力の配分で油圧回路28を介して行う際の規範FB目標ヨーモーメントMc_nom1を次式(7)で演算し、フィードバック不感帯処理部57に入力する。
Mc_nom1=K1・γerr+K2・βerr+K3・β′err
・・・・・・・・(7)
ここで、K1,K2,K3は、予め設定されたフィードバック・ゲインである。
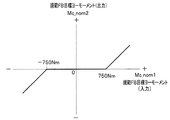
フィードバック不感帯処理部57は、図4に示すように、入力される規範FB目標ヨーモーメントMc_nom1に対して、例えば、±750Nm(ニュートン・メートル)の間の不感帯を設けて、規範FB目標ヨーモーメントMc_nom2を出力処理する。このように、入力される規範FB目標ヨーモーメントMc_nom1に対して出力される規範FB目標ヨーモーメントMc_nom2に不感帯を設けることにより、わずかな偏差γerr,βerrに対して絶えずヨーモーメント制御のフィードバックがなされて、乗員に不快感を与えないような安定したヨーモーメント制御とする。
フィードバック不感帯処理部57から出力された規範FB目標ヨーモーメントMc_nom2は、加算部58に入力される。
次に、図2に戻って後輪実横滑り角補正部65、加算部66、後輪横滑り角不感帯処理部67、第1のアンチスピン目標ヨーモーメントFB部68等による第1のアンチスピン目標ヨーモーメントFB(フィードバック)制御について説明する。この制御は、オーバステアによる車両1(図1参照)のスピンを抑制するために、車両1の重心点回りのヨーモーメント制御を、前輪WfL,WfR、後輪WrL,WrRに対する左右の制動力の配分でブレーキ制御ECU29を介して行う、または、駆動輪である前輪WfL,WfRの左右の駆動力の配分で油圧回路28を介して行う際の第1のアンチスピン・FB目標ヨーモーメントMc1_aspを、後記する式(8)で演算し、加算部58に入力するものである。
第1のアンチスピン目標ヨーモーメントFB部68は、次式(8)に従って、第1のアンチスピン・FB目標ヨーモーメントMc1_aspを演算し、加算部58にその結果を入力する。
Mc1_asp=K5・βr_act2 ・・・・・・・・・・・(8)
ここで、K5は、予め設定されたフィードバック・ゲインである。
ここで、前記した加算部66は、実後輪横滑り角速度β′r_actの絶対値大きいほど、車両1がオーバステア状態であり、オーバステア状態を抑制するために、後輪実横滑り角補正部65において実後輪横滑り角速度β′r_actに定数K4を乗じた結果を実後輪横滑り角βr_actに加算するものである。
FB目標値出力制御部62Aは、推定精度判別部52gから例えば姿勢状態量の推定精度の度合いを示す推定精度判別信号を受信し、推定精度が低い場合にはFB目標ヨーモーメントMc2を高値選択部64に出力せず、ゼロ信号を高値選択部64に出力する。
次に、図2に示すように第2の実車体横滑り角速度演算部70、第2の実車体横滑り角速度不感帯処理部81、第2のアンチスピン目標ヨーモーメントFB部82等による第2のアンチスピン目標ヨーモーメントFB(フィードバック)制御について説明する。この制御は、オーバステアによる車両1(図1参照)のスピンを抑制するために、車両1の重心点回りのヨーモーメント制御を、前輪WfL,WfR、後輪WrL,WrRに対する左右の制動力の配分でブレーキ制御ECU29を介して行う、または、駆動輪である前輪WfL,WfRの左右の駆動力の配分で油圧回路28を介して行う際の第2のアンチスピン・FB目標ヨーモーメントMc2_aspを、後記する式(9)で演算し、高値選択部64に入力するものである。
実車体横滑り角速度演算部70における実車体横滑り角速度β′z_emg1の詳細な演算方法は後記するが、実車体横滑り角速度演算部70は、前記した実車体横滑り角演算部52fとは異なり、実車体横滑り角演算部52cで演算された実車体横滑り角βz_actにもとづかないで、横方向加速度Gs、車速Vact、実ヨーレートγactから直接的に実車体横滑り角速度β′z_emg1を演算する。
そのような場合に、この第2のアンチスピン目標ヨーモーメントFB制御がバックアップとして機能する。
第2のアンチスピン目標ヨーモーメントFB部82は、PID制御演算により第2のアンチスピン・FB目標ヨーモーメントMc2_aspを演算し、高値選択部64にその結果を入力する。次式(9)に第2のアンチスピン目標ヨーモーメントFB部82におけるPID制御演算を形式的に表示する。
Mc2_asp=K10・β′z_emg2+K11・∫(β′z_emg2)dt
+K12・d/dt(β′z_emg2) ・・・(9)
ここで、K10,K11,K12は、予め設定されたフィードバック・ゲインである。
ここで、FB目標ヨーモーメントMc2、及び第2のアンチスピン・FB目標ヨーモーメントMc2_aspは、正負の値を取りうる。従って、高値選択部64が、FB目標ヨーモーメントMc2の値、及び第2のアンチスピン・FB目標ヨーモーメントMc2_aspの値の高値を選択すると言うのは、両者の値が同じ符号またはゼロのとき絶対値の大きい方法を選択すると言う意味である。両者の値が異なる符号のときは、高値選択部64は、第2のアンチスピン・FB目標ヨーモーメントMc2_aspの値を選択する。FB目標値出力制御部62Aから入力されたFB目標ヨーモーメントMc2の値またはゼロ値と、第2のアンチスピン目標ヨーモーメントFB部82から入力された第2のアンチスピン・FB目標ヨーモーメントMc2_aspとの内、高値選択部64において選択された値は、FB目標ヨーモーメントMc3としてアクチュエータ動作目標値合成部59に入力される。
次に、アクチュエータ動作目標値合成部59について説明する。アクチュエータ動作目標値合成部59には、エンジンECU27からエンジントルク、エンジン回転速度等、トランスミッションT/Mの減速段を示す信号が入力され、また、アクセルペダルポジションセンサ3から信号とブレーキペダルポジションセンサ4からの信号、実状態量取得部52の車速演算部52aからの車速Vact等が入力されている。
そして、アクチュエータ動作目標値合成部59は、前記した加算部58から入力されたFB目標ヨーモーメントMc2を各車輪Wの駆動・制動力に分配するアクチュエータ動作FB目標値分配処理部59aを有するとともに、アクチュエータ動作FB目標値分配処理部59aで演算した結果とFF目標値設定部51から入力されたFF目標値を加算して、油圧回路28及びブレーキ制御ECU29に出力する合成出力部59bを有している。
具体的には、合成出力部59bは、FF目標値設定部51において設定されたFF目標第1輪ブレーキ駆動・制動力及びFF目標第1輪駆動系駆動・制動力、並びにアクチュエータ動作FB目標値分配処理部59aで演算設定されたFB目標第1輪ブレーキ駆動・制動力にもとづいて、ブレーキBfLによる目標第1輪ブレーキ駆動・制動力と目標第1輪スリップ比を演算して、ブレーキ制御ECU29に出力する。
合成出力部59bは、FF目標値設定部51において設定されたFF目標第2輪ブレーキ駆動・制動力及びFF目標第2輪駆動系駆動・制動力、並びにアクチュエータ動作FB目標値分配処理部59aで演算設定されたFB目標第2輪ブレーキ駆動・制動力にもとづいて、ブレーキBfRによる目標第2輪ブレーキ駆動・制動力と目標第2輪スリップ比を演算して、ブレーキ制御ECU29に出力する。
合成出力部59bは、FF目標値設定部51において設定されたFF目標第4輪ブレーキ駆動・制動力及びFF目標第4輪駆動系駆動・制動力、並びにアクチュエータ動作FB目標値分配処理部59aで演算設定されたFB目標第4輪ブレーキ駆動・制動力にもとづいて、ブレーキBfLによる目標第4輪ブレーキ駆動・制動力と目標第4輪スリップ比を演算して、ブレーキ制御ECU29に出力する。
次に、仮想外力演算部61について説明する。仮想外力演算部61は、偏差γerr,βerrにもとづいてモデル車両1dの重心点CG回りの仮想外力ヨーモーメントMvを次式(10)で演算し、加算部63に入力する。
Mv=K6・γerr+K7・βerr ・・・・・・・・(10)
この仮想外力演算部61の機能は、例えば、前記した特許文献3の図9等に記載の仮想外力仮値決定部201にほぼ対応する。ただし、本実施形態では仮想外力ヨーモーメントMvのみを演算する点で異なる。
ここで、K6,K7は、予め設定されたフィードバック・ゲインである。
次に、図2を参照しながら第1のアンチスピン仮想ヨーモーメントFB(フィードバック)制御について説明する。この制御は、第1のアンチスピン仮想ヨーモーメントFB部69が、オーバステアによるモデル車両1d(図1参照)のスピンを抑制するために、モデル車両1dの重心点CG(図3参照)回りの第1のアンチスピン・仮想FBヨーモーメントMv1_aspを、次式(11)で演算し、加算部63に入力するものである。
Mv1_asp=K9・βr_act2 ・・・・・・・・・・・(11)
ここで、K9は、予め設定されたフィードバック・ゲインである。ちなみに、フィードバック・ゲインK9は、値がフィードバック・ゲインK5と同じでも良い。
次に、図2を参照しながら第2のアンチスピン仮想ヨーモーメントFB(フィードバック)制御について説明する。第2の実車体横滑り角速度不感帯処理部81から出力された前記の実車体横滑り角速度β′z_emg2は、第2のアンチスピン仮想ヨーモーメントFB部83にも入力される。
第2のアンチスピン仮想ヨーモーメントFB部83は、PID制御演算により第2のアンチスピン・仮想FBヨーモーメントMv2_aspを演算し、加算部63にその結果を入力する。次式(12)に第2のアンチスピン仮想ヨーモーメントFB部83におけるPID制御演算を形式的に表示する。
Mv2_asp=K13・β′z_emg2+K14・∫(β′z_emg2)dt
+K15・d/dt(β′z_emg2) ・・・(12)
ここで、K13,K14,K15は、予め設定されたフィードバック・ゲインである。
実車体横滑り角速度演算部70は、入力として、ヨーレートセンサ31からの実ヨーレートγactの信号、横方向加速度センサ32からの横方向加速度Gs、車速演算部52aにおいて演算された車速Vact、摩擦係数推定演算部52bで推定演算された路面摩擦係数μ、実車体横滑り角演算部52cにおいて推定演算された実車体横滑り角βz_act、もしくは、推定精度判別部52gの判定する実姿勢状態量の確からしさ等を入力として用いる。
ちなみに、曲線X2pと曲線X2mを縦に細破線で結んであるのは、正側の曲線X2pと負側の曲線X2mの波形の時間的な相対関係を分かり易く示すために引いたものであり、曲線X3pと曲線X3mとの間、曲線X4pと曲線X4mとの間、曲線Y2pと曲線Y2mとの間、曲線Y3pと曲線Y3mとの間の縦の細破線も同様である。
ちなみに、曲線X3p,X3mで示される量は、横方向加速度Gsにもとづく「路面限界ヨーレート」に対応する。
オフセット演算部74Aは、βz_act確かさデータ部73において推定された実車体横滑り角βz_actの確からしさにもとづいて、正値のオフセット量を設定して、曲線X3pに加算し、曲線X4pを生成する。オフセット演算部74Bは、βz_act確かさデータ部73において推定された実車体横滑り角βz_actの確からしさにもとづいて、負値のオフセット量を設定して、曲線X3mに加算し、曲線X4mを生成する。
減算部77Aでは、正側の実ヨーレートの曲線Y2pから、公転ヨーレート演算部75Aで演算された曲線X5pを減算して、その結果を正値判定部78Aに入力する。減算部77Bでは、負側の実ヨーレートの曲線Y2mから、公転ヨーレート演算部75Bで演算された曲線X5mを減算して、その結果を負値判定部78Bに入力する。
合成加算部79では、曲線Y3p,Y3mのデータを合成して、実車体横滑り角速度β′z_emg1の曲線Y4を生成し、第2の実車体横滑り角速度不感帯処理部81に入力する。
以上のように実車体横滑り角速度演算部70において、実ヨーレートγact、横方向加速度Gs、車速Vactにもとづいて、安定性の高い実車体横滑り角速度β′z_emg1が得られる。
推定された実車体横滑り角βz_actをもとに実横滑り角速度演算部52fにおいて実車体横滑り角β′z_actや後輪実横滑り角速度β′r_act算出し、FB目標値演算部56で規範FB目標ヨーモーメントMc_nom1を演算し、フィードバック不感帯処理部57で不感帯処理をされて規範FB目標ヨーモーメントMc_nom2となる。
第1のアンチスピン目標ヨーモーメントFB部68では、第1のアンチスピン・FB目標ヨーモーメントMc1_aspを演算する。最終的に前記した規範FB目標ヨーモーメントMc_nom2と第1のアンチスピン・FB目標ヨーモーメントMc1_aspが加算されてFB目標ヨーモーメントMc2を得ても、そのFB目標ヨーモーメントMc2の信頼性が低く、運転者の意図通りのヨーモーメント制御とはならない可能性がある。
しかしながら、本実施形態によれば、第2のアンチスピン仮想ヨーモーメントFB部83から第2のアンチスピン・仮想FBヨーモーメントMv2_aspを加算部63に入力することにより、規範動特性モデル演算部54における動特性モデルの演算が安定化される。
このとき、実車体横滑り角速度β′z_emg1の絶対値を大きくする方向に作用すると、第2のアンチスピン・仮想FBヨーモーメントMv2_aspも絶対値が大きくなり、加算部63を介して規範動特性モデル演算部54における動特性モデルの演算も安定化する。
次に、本実施形態の変形例について説明する。
第1の実施形態では、高値選択部64は、FB目標値出力制御部62AからのFB目標ヨーモーメントMc2の値またはゼロの値と、第2のアンチスピン目標ヨーモーメントFB部82からの第2のアンチスピン・FB目標ヨーモーメントMc2_aspの値とを比較して高値出力するとしたがそれに限定されるものではない。高値選択部64は、図2に破線矢印で示したように実車体横滑り角βz_actを取得して、実車体横滑り角βz_actの絶対値が所定の値より小さい場合は、オーバステア状態ではないとして、FB目標ヨーモーメントMc3の値の絶対値が所定の値以下となるように制限して出力する。
このようにアクチュエータ動作目標値合成部59に出力するFB目標ヨーモーメントMc3の値を制限することにより、オーバステア状態でないにもかかわらず、スピンを抑制するFB目標ヨーモーメントMc3が、演算誤差や、ヨーレートセンサ31、横方向加速度センサ32のノイズ等により過大にフィードバックすることを防止でき、乗員に違和感を与えない車両運動の制御ができる。
次に、図8を参照しながら第2の実施形態について説明する。図8は、第2の実施形態に係る車両の運動制御装置における制御ロジックを説明するためのブロック機能構成図である。
第2の実施形態は、第1の実施形態において、FB目標値出力制御部62Aと高値選択部64を用いたが、第2の実施形態では、その代わりに、FB目標値出力制御部62Bに置き換えたものである。第1の実施形態と同じ構成については、同じ符号を付し、重複する説明を省略する。
なお、本実施形態における推定精度判別部52gは、例えば、セレクトレバーポジションセンサ2、アクセルペダルポジションセンサ3、ブレーキペダルポジションセンサ4、車輪速センサ30fL,30fR,30rL,30rR、ヨーレートセンサ31、横方向加速度センサ32、転舵角センサ33、前後方向加速度センサ34からの信号を監視し、例えば、操舵角が所定以上の状況下において、横方向加速度が小さいにも関わらず摩擦係数推定演算部52bの推定する摩擦係数μが大きい場合や、スリップ率が大きいにも関わらず摩擦係数μが大きい場合等は、実際の路面摩擦係数に対して摩擦係数推定演算部52bの出力に含まれる誤差が大きい可能性があるため、実車体横滑り角演算部52cの実車体横滑り角βz_actの推定精度が低いと判定して、実車体横滑り角速度β′z_emg2にもとづく第2のアンチスピン・FB目標ヨーモーメントMc2_aspの後記する重み(優先度)G2を高く設定し、FB目標ヨーモーメントMc2の後記する重み(優先度)G1を低く設定して、FB目標値出力制御部62Bに入力する。
そのために、推定精度判別部52gは、図示しない優先度設定のための関数データ部またはテーブルデータ部を有し、例えば、関数データ部またはテーブルデータ部は、実車体横滑り角速度β′z_act、実車体横滑り角速度β′z_emg2、車速Vact、転舵角δ、推定された路面摩擦係数μ、制動状態か非制動状態か等を引数にして、重みG1,G2を演算する。
なお、上記優先度設定においては、車速演算部52aで演算された、各車輪Wのスリップ率や、規範動特性モデル演算部54の演算する規範姿勢状態量、車両1の実姿勢状態量、および偏差演算部55の演算した偏差等にもとづいて重みG1,G2を設定するよう構成しても良い。
Mc3=G1・Mc2+G2・Mc2_asp ・・・・・・・(13)
この重みG1,G2の設定の仕方については、本実施形態に限らず、前記したβz_act確かさデータ部73のデータを利用して、βz_actの確からしさが高いほど重みG1を大きく設定するとともに重みG2を小さく設定し、βz_actの確からしさが低いほど重みG1を小さく設定するとともに重みG2を大きく設定しても良い。
このとき、重みG1,G2の合計値が、例えば、1.0に規格化されるように設定されることが好ましい。
また、このときFB目標ヨーモーメントMc2と、第2のアンチスピン・FB目標ヨーモーメントMc2_aspの重みG1,G2を連続的に変化するように設定しても良い。
このようにアクチュエータ動作目標値合成部59に出力するFB目標ヨーモーメントMc3の値を制限することにより、オーバステア状態でないにもかかわらず、スピンを抑制するFB目標ヨーモーメントMc3が、演算誤差や、ヨーレートセンサ31、横方向加速度センサ32のノイズ等により過大にフィードバックすることを防止でき、乗員に違和感を与えない車両1の運動制御ができる。
1d モデル車両
2 セレクトレバーポジションセンサ(操作状態検知手段)
3 アクセルペダルポジションセンサ(操作状態検知手段)
4 ブレーキペダルポジションセンサ(操作状態検知手段)
12 タイヤ特性設定手段
21a 操向ハンドル
21c 操作角検出センサ(操作状態検知手段)
25 転舵部
25a ステアリングモータ
27 エンジンECU
28 油圧回路
29 ブレーキ制御ECU
30,30fL,30fR,30rL,30rR 車輪速センサ
31 ヨーレートセンサ(運動状態検知手段)
32 横方向加速度センサ(運動状態検知手段)
33 転舵角センサ(操作状態検知手段)
37 コントロールユニット(車両の運動制御装置)
40 転舵角制御装置
51 FF目標値設定部
52 実状態量取得部(運動状態検知手段、実姿勢状態決定手段
52a 車速演算部(運動状態検知手段)
52b 摩擦係数推定演算部(実姿勢状態決定手段、路面摩擦係数推定手段)
52c 実車体横滑り角演算部(実姿勢状態決定手段)
52d 実前輪横滑り角演算部(実姿勢状態決定手段)
52e 実後輪横滑り角演算部(実姿勢状態決定手段)
52f 実横滑り角速度演算部(実姿勢状態決定手段)
52g 推定精度判別部(推定制度判別手段、優先度選択手段)
52i タイヤ特性設定部(運動状態検知手段、)
53 規範操作量決定部
53a 前回状態量保持部
54 規範動特性モデル演算部(規範姿勢状態量演算手段)
55 偏差演算部(姿勢状態量偏差演算手段)
56 FB目標値演算部(第1制御目標ヨーモーメント演算手段)
57 フィードバック不感帯処理部
58,66 加算部
59 アクチュエータ動作目標値合成部(アクチュエータ制御手段)
59a アクチュエータ動作FB目標値分配処理部
59b 合成出力部
61 仮想外力演算部(仮想外力演算手段)
62A FB目標値出力制御部
62B FB目標値出力制御部(優先度選択手段、制御目標量決定手段)
63 加算部
64 高値選択部(高値選択手段)
65 後輪実横滑り角補正部
67 後輪横滑り角不感帯処理部(制限手段)
68 第1のアンチスピン目標ヨーモーメントFB部(第1の制御目標ヨーモーメント演算手段)
69 第1のアンチスピン仮想ヨーモーメントFB部
70 第2の実車体横滑り角速度演算部(車体横滑り角速度演算手段)
71 符号分離部
72A,72B 減衰側LPF処理部
73 βz_act確かさデータ部(実車体横滑り角推定精度判別手段)
74A,74B オフセット演算部
75A,75B 公転ヨーレート演算部
76 符号分離部
77A,77B 減算部
78A 正値判定部
78B 負値判定部
79 合成加算部
81 第2の実車体横滑り角速度不感帯処理部(制限手段)
82 第2のアンチスピン目標ヨーモーメントFB部(第2制御目標ヨーモーメント演算手段)
83 第2のアンチスピン仮想ヨーモーメントFB部
AL 左ドライブシャフト
AR 右ドライブシャフト
BfL,BfR,BrL,BrR ブレーキ(アクチュエータ)
CL 左油圧クラッチ(アクチュエータ)
CR 右油圧クラッチ(アクチュエータ)
Mc_nom1,Mc_nom2 規範FB目標ヨーモーメント
Mc1_asp 第1のアンチスピン・FB目標ヨーモーメント
Mc2_asp 第2のアンチスピン・FB目標ヨーモーメント(第2の制御目標ヨーモーメント)
Mc2 FB目標ヨーモーメント(第1の制御目標ヨーモーメント)
Mc3 FB目標ヨーモーメント
Mv 仮想外力ヨーモーメント
Mv1_asp 第1のアンチスピン・仮想FBヨーモーメント
Mv2_asp 第2のアンチスピン・仮想FBヨーモーメント
Claims (7)
- 運転者の車両の操作状態量を検知する操作状態検知手段と、
車両の運動状態量を検知する運動状態検知手段と、
前記車両の操作状態量及び前記車両の運動状態量に対応した車両の規範姿勢状態量を、所定の外力が作用する状態における車両の運動モデルにもとづき演算する規範姿勢状態量演算手段と、
前記操作状態検知手段からの検知信号及び前記運動状態検知手段からの検知信号にもとづき、車両の実姿勢状態量を決定する実姿勢状態決定手段と、
前記車両の規範姿勢状態量と前記車両の実姿勢状態量との偏差を演算する姿勢状態量偏差演算手段と、
前記姿勢状態量偏差演算手段で演算された前記偏差にもとづき前記外力を補正して前記規範姿勢状態量演算手段にフィードバックする仮想外力演算手段と、
車両運動を発生させるアクチュエータの制御目標量を決定するアクチュエータ制御手段と、を備え、
前記運動状態検知手段は、横方向加速度を検知する横方向加速度センサと、実ヨーレートを検知するヨーレートセンサを少なくとも含んだ車両の運動制御装置であって、
前記横方向加速度及び前記実ヨーレートにもとづいて車体横滑り角速度を演算する車体横滑り角速度演算手段をさらに備え、
前記アクチュエータ制御手段は、前記車体横滑り角速度、前記車両の実姿勢状態量及び前記偏差の内の少なくとも1つにもとづき、前記アクチュエータの制御目標量を決定することを特徴とする車両の運動制御装置。 - 前記実姿勢状態量及び前記車体横滑り角速度の内の少なくとも一方の値にもとづく前記アクチュエータの制御目標量の決定を許可し、他方にもとづく前記アクチュエータの制御目標量の決定を禁止する制御目標量決定制御手段を備え、
前記制御目標量決定制御手段は、前記少なくとも一方の値にもとづき前記アクチュエータ制御手段に前記アクチュエータの制御目標量を決定させることを特徴とする請求項1に記載の車両の運動制御装置。 - 前記車体横滑り角速度にもとづく前記アクチュエータの制御目標量の決定と、前記実姿勢状態量にもとづく前記アクチュエータの制御目標量の決定との間の優先度を決定する優先度選択手段を備え、
前記アクチュエータ制御手段は、前記優先度選択手段が決定した優先度にもとづいて前記アクチュエータの制御目標量の決定をすることを特徴とする請求項1または請求項2に記載の車両の運動制御装置。 - 前記実姿勢状態量の確からしさを推定する推定精度判別手段を備え、
前記推定精度判別手段は、前記実姿勢状態量の確からしさが低いと判定した際に、
前記車体横滑り角速度にもとづく前記アクチュエータの制御目標量を増加させるように前記優先度を高めることを特徴とする請求項3に記載の車両の運動制御装置。 - 運転者の車両の操作状態量を検知する操作状態検知手段と、
車両の運動状態量を検知する運動状態検知手段と、
前記車両の操作状態量及び前記車両の運動状態量に対応した車両の規範姿勢状態量を、所定の外力が作用する状態における車両の運動モデルにもとづき演算する規範姿勢状態量演算手段と、
前記操作状態検知手段からの検知信号及び前記運動状態検知手段からの検知信号にもとづき、車両の実姿勢状態量を決定する実姿勢状態決定手段と、
前記車両の規範姿勢状態量と前記車両の実姿勢状態量との偏差を演算する姿勢状態量偏差演算手段と、
前記姿勢状態量偏差演算手段で演算された前記偏差にもとづき前記外力を補正して前記規範姿勢状態量演算手段にフィードバックする仮想外力演算手段と、
車両運動を発生させるアクチュエータの制御目標量を決定するアクチュエータ制御手段と、を備え、
前記運動状態検知手段は、横方向加速度を検知する横方向加速度センサと、実ヨーレートを検知するヨーレートセンサを少なくとも含んだ車両の運動制御装置であって、
前記横方向加速度及び前記実ヨーレートにもとづいて車体横滑り角速度を演算する車体横滑り角速度演算手段と、
前記車両の実姿勢状態量にもとづき第1の制御目標ヨーモーメントを決定する第1制御目標ヨーモーメント演算手段と、
前記車体横滑り角速度にもとづき第2の制御目標ヨーモーメントを決定する第2制御目標ヨーモーメント演算手段と、
前記第1の制御目標ヨーモーメントと前記第2の制御目標ヨーモーメントとを比較して高値の方を選択する高値選択手段を備え、
該高値選択手段は、前記第1及び第2の制御目標ヨーモーメントの内の高値の方を選択して前記アクチュエータ制御手段に送出し、
該アクチュエータ制御手段は、前記高値選択手段により選択された前記第1及び第2の制御目標ヨーモーメントの内の高値の方にもとづいて前記アクチュエータの制御目標量を決定することを特徴とする車両の運動制御装置。 - 前記車体横滑り角速度演算手段により演算された前記車体横滑り角速度、または、実姿勢状態決定手段により決定された前記車両の実姿勢状態量が、所定以下のときに、前記決定された第1及び第2の制御目標ヨーモーメントを制限して前記アクチュエータ制御手段に出力する制限手段を有していることを特徴とする請求項5に記載の車両の運動制御装置。
- 前記車体横滑り角速度演算手段は、前記車両の実姿勢状態量の内の実車体横滑り角の確からしさを推定する実車体横滑り角推定精度判別手段を有し、
該実車体横滑り角推定精度判別手段が判定する前記実車体横滑り角の確からしさに応じて前記車体横滑り角速度の出力を可変とするよう構成されることを特徴とする請求項1から6のいずれか1項に記載の車両の運動制御装置
Priority Applications (3)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2010049097A JP4918148B2 (ja) | 2010-03-05 | 2010-03-05 | 車両の運動制御装置 |
| EP11156954.7A EP2366597B1 (en) | 2010-03-05 | 2011-03-04 | Vehicle Motion Control Apparatus |
| US13/040,410 US8355844B2 (en) | 2010-03-05 | 2011-03-04 | Vehicle motion control apparatus |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2010049097A JP4918148B2 (ja) | 2010-03-05 | 2010-03-05 | 車両の運動制御装置 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2011183865A true JP2011183865A (ja) | 2011-09-22 |
| JP4918148B2 JP4918148B2 (ja) | 2012-04-18 |
Family
ID=44023090
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2010049097A Expired - Fee Related JP4918148B2 (ja) | 2010-03-05 | 2010-03-05 | 車両の運動制御装置 |
Country Status (3)
| Country | Link |
|---|---|
| US (1) | US8355844B2 (ja) |
| EP (1) | EP2366597B1 (ja) |
| JP (1) | JP4918148B2 (ja) |
Cited By (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN110248856A (zh) * | 2017-02-03 | 2019-09-17 | 本田技研工业株式会社 | 车辆控制装置、车辆控制方法及车辆控制程序 |
| US11208144B2 (en) | 2018-11-07 | 2021-12-28 | Honda Motor Co., Ltd. | Vehicle behavior stabilization system |
Families Citing this family (23)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US20130226410A1 (en) * | 2010-11-04 | 2013-08-29 | Toyota Jidosha Kabushiki Kaisha | Braking control device |
| RU2568163C1 (ru) * | 2012-05-14 | 2015-11-10 | Ниссан Мотор Ко., Лтд. | Устройство управления транспортного средства и способ управления транспортным средством |
| JP5644842B2 (ja) * | 2012-11-20 | 2014-12-24 | トヨタ自動車株式会社 | 操舵装置 |
| DE102014200100B4 (de) * | 2013-01-15 | 2018-04-05 | Ford Global Technologies, Llc | Lenkwinkelfehlerkorrektur |
| CN104111069B (zh) * | 2013-04-17 | 2018-04-27 | 富泰华工业(深圳)有限公司 | 自动定位系统及方法 |
| JP6416574B2 (ja) * | 2014-09-29 | 2018-10-31 | 日立オートモティブシステムズ株式会社 | 車両の制御方法、車両制御システム、車両制御装置、および制御プログラム |
| JP6219883B2 (ja) * | 2015-05-22 | 2017-10-25 | 株式会社アドヴィックス | 車両用制御装置 |
| CN106467111B (zh) | 2015-08-20 | 2019-06-07 | 比亚迪股份有限公司 | 车身稳定控制方法、系统及汽车 |
| JP6109894B2 (ja) * | 2015-08-27 | 2017-04-05 | 富士重工業株式会社 | 車両制御装置および車両制御方法 |
| WO2017044757A1 (en) * | 2015-09-13 | 2017-03-16 | Gm Global Technology Operations, Llc | Automotive vehicle actuator control system |
| JP6585444B2 (ja) * | 2015-09-25 | 2019-10-02 | Ntn株式会社 | 車両姿勢制御装置 |
| US10407035B1 (en) * | 2016-08-03 | 2019-09-10 | Apple Inc. | Integrated chassis control |
| US10019008B2 (en) * | 2016-09-28 | 2018-07-10 | Baidu Usa Llc | Sideslip compensated control method for autonomous vehicles |
| US10343685B2 (en) | 2016-09-28 | 2019-07-09 | Baidu Usa Llc | Physical model and machine learning combined method to simulate autonomous vehicle movement |
| US10787192B1 (en) | 2017-04-11 | 2020-09-29 | Apple Inc. | Steer-by-wire system with multiple steering actuators |
| JP6844500B2 (ja) * | 2017-10-30 | 2021-03-17 | トヨタ自動車株式会社 | 車両の挙動制御装置 |
| JP7032275B2 (ja) * | 2018-09-21 | 2022-03-08 | トヨタ自動車株式会社 | 車両用制動制御装置 |
| US11543343B2 (en) | 2019-09-05 | 2023-01-03 | Volvo Car Corporation | Road friction estimation |
| US11318947B2 (en) * | 2019-12-23 | 2022-05-03 | Volvo Car Corporation | Estimating surface friction coefficients using rear-wheel steering excitations |
| CN111814258B (zh) * | 2020-07-20 | 2023-01-17 | 天水师范学院 | 用于四轮独立电驱动车辆线控转向系统传动比的设计方法 |
| US11787414B2 (en) * | 2021-07-23 | 2023-10-17 | GM Global Technology Operations LLC | GPS enhanced friction estimation |
| CN114167728B (zh) * | 2021-12-08 | 2023-01-31 | 广东工业大学 | 带有死区约束的多智能体系统的自适应控制方法及装置 |
| CN114889446B (zh) * | 2022-05-09 | 2024-06-25 | 武汉理工大学 | 一种越野车辆两方向转矩矢量分配方法、设备及存储介质 |
Citations (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP4143111B2 (ja) * | 2005-12-27 | 2008-09-03 | 本田技研工業株式会社 | 車両の制御装置 |
Family Cites Families (7)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2885125B2 (ja) | 1995-03-30 | 1999-04-19 | トヨタ自動車株式会社 | 車両の旋回に伴って変化する運動状態量の推定方法 |
| JP3132371B2 (ja) * | 1995-10-06 | 2001-02-05 | トヨタ自動車株式会社 | 車輌の挙動制御装置 |
| JP3426513B2 (ja) | 1998-09-09 | 2003-07-14 | 本田技研工業株式会社 | 車両のオーバーステア状態検出装置 |
| JP4021185B2 (ja) | 2001-12-07 | 2007-12-12 | 本田技研工業株式会社 | ヨーモーメントフィードバック制御方法 |
| JP4283550B2 (ja) | 2003-01-24 | 2009-06-24 | 本田技研工業株式会社 | 操舵装置 |
| JP4485457B2 (ja) | 2005-11-24 | 2010-06-23 | 本田技研工業株式会社 | 車両のアンチロック制御装置 |
| JP2008239115A (ja) | 2007-03-29 | 2008-10-09 | Honda Motor Co Ltd | 車両の運動制御装置 |
-
2010
- 2010-03-05 JP JP2010049097A patent/JP4918148B2/ja not_active Expired - Fee Related
-
2011
- 2011-03-04 EP EP11156954.7A patent/EP2366597B1/en not_active Not-in-force
- 2011-03-04 US US13/040,410 patent/US8355844B2/en active Active
Patent Citations (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP4143111B2 (ja) * | 2005-12-27 | 2008-09-03 | 本田技研工業株式会社 | 車両の制御装置 |
Cited By (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN110248856A (zh) * | 2017-02-03 | 2019-09-17 | 本田技研工业株式会社 | 车辆控制装置、车辆控制方法及车辆控制程序 |
| US11386720B2 (en) | 2017-02-03 | 2022-07-12 | Honda Motor Co., Ltd. | Vehicle control device, vehicle control method, and vehicle control program |
| US11208144B2 (en) | 2018-11-07 | 2021-12-28 | Honda Motor Co., Ltd. | Vehicle behavior stabilization system |
Also Published As
| Publication number | Publication date |
|---|---|
| EP2366597A2 (en) | 2011-09-21 |
| JP4918148B2 (ja) | 2012-04-18 |
| US20110218700A1 (en) | 2011-09-08 |
| EP2366597B1 (en) | 2013-05-22 |
| EP2366597A3 (en) | 2012-05-16 |
| US8355844B2 (en) | 2013-01-15 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP4918148B2 (ja) | 車両の運動制御装置 | |
| JP4918149B2 (ja) | 車両の運動制御装置 | |
| JP5193885B2 (ja) | 車両の運動制御装置 | |
| JP5462373B2 (ja) | 車両の運動制御装置 | |
| CN111267835B (zh) | 基于模型预测算法的四轮独立驱动汽车稳定性控制方法 | |
| CN112752691B (zh) | 一种车辆前后驱动扭矩分配方法、装置及车辆 | |
| JP2008285066A (ja) | 加加速度情報を用いた車両のヨーモーメント制御装置 | |
| JP2008081006A (ja) | 車両用走行制御装置 | |
| JP5351814B2 (ja) | 車両の運動制御装置 | |
| JP5452696B2 (ja) | 車両の運動制御装置 | |
| JP5359351B2 (ja) | 挙動制御装置 | |
| JP2008239115A (ja) | 車両の運動制御装置 | |
| JP4990384B2 (ja) | 加加速度情報を用いた車両の運動制御方法 | |
| JP5559833B2 (ja) | 加加速度情報を用いた車両の運動制御装置および方法 | |
| JP5993843B2 (ja) | 車両の運動制御装置 | |
| JP2011218953A (ja) | 駆動力制御装置 | |
| JP5416638B2 (ja) | 後退判定装置、および後退判定方法 | |
| JP4284210B2 (ja) | 車両の操舵制御装置 | |
| JP5918303B2 (ja) | 加加速度情報を用いて運動制御される車両 | |
| WO2023210533A1 (ja) | 車両の制御装置 | |
| JP5369039B2 (ja) | 車両の運動制御装置 | |
| JP5316475B2 (ja) | 四輪駆動車の前後駆動力配分比制御装置 | |
| JP4284211B2 (ja) | 車両の操舵制御装置 | |
| JP2012187984A (ja) | 前後駆動力配分比制御装置 | |
| JP2020043668A (ja) | 車両運動制御装置およびこの車両運動制御装置を備えた車両 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20111011 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20111212 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20120117 |
|
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20120127 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20150203 Year of fee payment: 3 |
|
| R150 | Certificate of patent or registration of utility model |
Ref document number: 4918148 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 Free format text: JAPANESE INTERMEDIATE CODE: R150 |
|
| LAPS | Cancellation because of no payment of annual fees |