JP2011114893A - 電気機械装置 - Google Patents
電気機械装置 Download PDFInfo
- Publication number
- JP2011114893A JP2011114893A JP2009267045A JP2009267045A JP2011114893A JP 2011114893 A JP2011114893 A JP 2011114893A JP 2009267045 A JP2009267045 A JP 2009267045A JP 2009267045 A JP2009267045 A JP 2009267045A JP 2011114893 A JP2011114893 A JP 2011114893A
- Authority
- JP
- Japan
- Prior art keywords
- motor
- rotating shaft
- spring
- shaft
- hollow portion
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Withdrawn
Links
Images









Abstract
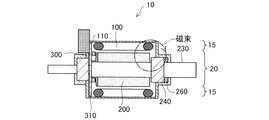
【解決手段】電気機械装置10であって、中心にシャフト230を有するローター20と、前記ローター20の周囲に設置されたステーター15と、を備え、前記シャフト230は、中空部を有している。
【選択図】図1
Description
電気機械装置であって、中心にシャフトを有するローターと、前記ローターの周囲に設置されたステーターと、を備え、前記シャフトは、中空部を有している、電気機械装置。
この適用例によれば、渦電流損により発熱したシャフトを中空部より冷却することが可能となる。
適用例1に記載の電気機械装置において、前記シャフトは、炭素繊維を含む樹脂で構成されている、電気機械装置。
この適用例によれば、シャフトが炭素繊維を含む樹脂でできているので、回転軸が金属である場合に比べて渦電流損を少なくし、シャフトにおける発熱を少なくすることが可能である。
適用例2に記載の電気機械装置において、前記炭素繊維は、複数の繊維束が交差した布状繊維として形成されている、電気機械装置。
この適用例によれば、シャフトのねじれ強度を含む諸強度を高めることが可能となる。
適用例1から適用例3のいずれかに記載の電気機械装置において、さらに、前記シャフトの中空部に外気を送風するための羽根を備える、電気機械装置。
この適用例によれば、中空部に外気を送風するので、シャフトをより冷却することが可能となる。
適用例4に記載の電気機械装置において、前記羽根は、前記中空部の中に挿入されている、電気機械装置。
この適用例によれば、羽根は中空部に中に挿入されているので、電気機械装置を利用する場合に、羽根が他の部品と干渉しない。
図1は、第1の実施例のコアレスモーターの構成を模式的に示す説明図である。図1(A)は、コアレスモーター10を回転軸に平行な面で切った断面であり、図1(B)は、コアレスモーターを回転軸に垂直な面(1B−1B切断面)で切った断面である。
図4は、第2の実施例に係るモーターの構成を示す説明図である。第2の実施例は、第1の実施例におけるバネ260の位置が異なっている。第1の実施例では、バネ260は、磁石200と、軸受け240との間に配置されているが、第2の実施例では、軸受け240の磁石200と反対側に配置されている。他の構成は、第1の実施例と同様である。
本発明は、各種の装置に適用可能である。例えば、本発明は、ファンモーター、時計(針駆動)、ドラム式洗濯機(単一回転)、ジェットコースタ、振動モーターなどの種々の装置のモーターに適用可能である。本発明をファンモーターに適用した場合には、例えば、種々の効果(低消費電力、低振動、低騒音、低回転ムラ、低発熱、高寿命)を奏させることが可能となる。このようなファンモーターは、例えば、デジタル表示装置や、車載機器、燃料電池式パソコン、燃料電池式デジタルカメラ、燃料電池式ビデオカメラ、燃料電池式携帯電話などの燃料電池使用機器、プロジェクタ等の各種装置のファンモーターとして使用することができる。本発明のモーターは、さらに、各種の家電機器や電子機器のモーターとしても利用可能である。例えば、光記憶装置や、磁気記憶装置、ポリゴンミラー駆動装置等において、本発明によるモーターをスピンドルモーターとして使用することが可能である。また、本発明によるモーターは、移動体やロボット用のモーターとしても利用可能である。
15…ステーター
20…ローター
100…電磁コイル
110…ケーシング
200…磁石
230…回転軸
231…中空部
241…ベアリングボール
260〜264…バネ
300…磁気センサー
310…回路基板
400、401…羽根
500…炭素繊維
510…束
511〜514…繊維束
515、516…隙間
520…布状繊維
530…筒
3100…プロジェクタ
3110R…光源
3140R…液晶ライトバルブ
3150…クロスダイクロイックプリズム
3160…投写レンズ系
3170…冷却ファン
3180…制御部
3200…携帯電話
3220…ファン
3230…燃料電池
3300…自転車
3310…モーター
3320…制御回路
3330…充電池
3400…ロボット
3410…第2のアーム
3420…第2のアーム
3430…モーター
3500…鉄道車両
3510…モーター
3520…車輪
Claims (5)
- 電気機械装置であって、
中心にシャフトを有するローターと、
前記ローターの周囲に設置されたステーターと、
を備え、
前記シャフトは、中空部を有している、
電気機械装置。 - 請求項1に記載の電気機械装置において、
前記シャフトは、炭素繊維を含む樹脂で構成されている、
電気機械装置。 - 請求項2に記載の電気機械装置において、
前記炭素繊維は、複数の繊維束が交差した布状繊維として形成されている、
電気機械装置。 - 請求項1から請求項3のいずれかに記載の電気機械装置において、さらに
前記シャフトの中空部に外気を送風するための羽根を備える、
電気機械装置。 - 請求項4に記載の電気機械装置において、
前記羽根は、前記中空部の中に挿入されている、
電気機械装置。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2009267045A JP2011114893A (ja) | 2009-11-25 | 2009-11-25 | 電気機械装置 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2009267045A JP2011114893A (ja) | 2009-11-25 | 2009-11-25 | 電気機械装置 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2011114893A true JP2011114893A (ja) | 2011-06-09 |
| JP2011114893A5 JP2011114893A5 (ja) | 2012-11-01 |
Family
ID=44236842
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2009267045A Withdrawn JP2011114893A (ja) | 2009-11-25 | 2009-11-25 | 電気機械装置 |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP2011114893A (ja) |
Cited By (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN103899633A (zh) * | 2012-12-28 | 2014-07-02 | 永元电机(苏州)有限公司 | 可散热的马达心轴 |
| JP2015500620A (ja) * | 2011-11-30 | 2015-01-05 | アーベーベー・リサーチ・リミテッドAbb Research Ltd. | 電気機械および電気機械ロータ |
| JP2019214257A (ja) * | 2018-06-12 | 2019-12-19 | マツダ株式会社 | インホイールモータ駆動装置 |
| CN113315313A (zh) * | 2021-02-02 | 2021-08-27 | 上海彩虹鱼海洋科技股份有限公司 | 用于无人艇的外转子无刷电机的循环冷却系统 |
Citations (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH1155880A (ja) * | 1997-06-20 | 1999-02-26 | Paul Mueller Gmbh & Co Kg Unternehmens Beteil | モータ駆動するスピンドルのシャフト |
| JP2000121090A (ja) * | 1998-10-20 | 2000-04-28 | Shinko Kogyo Co Ltd | 空気調和装置の送風ユニット |
| JP2003199272A (ja) * | 2001-12-28 | 2003-07-11 | Toyoda Mach Works Ltd | ブラシレスモータ及びその組み立て方法 |
| JP2006320036A (ja) * | 2005-05-10 | 2006-11-24 | Hitachi Ltd | モータ |
-
2009
- 2009-11-25 JP JP2009267045A patent/JP2011114893A/ja not_active Withdrawn
Patent Citations (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH1155880A (ja) * | 1997-06-20 | 1999-02-26 | Paul Mueller Gmbh & Co Kg Unternehmens Beteil | モータ駆動するスピンドルのシャフト |
| JP2000121090A (ja) * | 1998-10-20 | 2000-04-28 | Shinko Kogyo Co Ltd | 空気調和装置の送風ユニット |
| JP2003199272A (ja) * | 2001-12-28 | 2003-07-11 | Toyoda Mach Works Ltd | ブラシレスモータ及びその組み立て方法 |
| JP2006320036A (ja) * | 2005-05-10 | 2006-11-24 | Hitachi Ltd | モータ |
Cited By (6)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2015500620A (ja) * | 2011-11-30 | 2015-01-05 | アーベーベー・リサーチ・リミテッドAbb Research Ltd. | 電気機械および電気機械ロータ |
| CN103899633A (zh) * | 2012-12-28 | 2014-07-02 | 永元电机(苏州)有限公司 | 可散热的马达心轴 |
| CN103899633B (zh) * | 2012-12-28 | 2016-12-28 | 永元电机(苏州)有限公司 | 可散热的马达心轴 |
| JP2019214257A (ja) * | 2018-06-12 | 2019-12-19 | マツダ株式会社 | インホイールモータ駆動装置 |
| JP7189486B2 (ja) | 2018-06-12 | 2022-12-14 | マツダ株式会社 | インホイールモータ駆動装置 |
| CN113315313A (zh) * | 2021-02-02 | 2021-08-27 | 上海彩虹鱼海洋科技股份有限公司 | 用于无人艇的外转子无刷电机的循环冷却系统 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| US7986069B2 (en) | Brushless electric machine | |
| JP5211593B2 (ja) | ブラシレス電気機械 | |
| JP2012125088A (ja) | 電気機械装置及びロボット及び車輪 | |
| JP2011114893A (ja) | 電気機械装置 | |
| JPWO2008126408A1 (ja) | ドラム式洗濯機 | |
| JP5359027B2 (ja) | 永久磁石構造及びそれを用いた装置 | |
| JP2012210149A5 (ja) | ロボット | |
| JP5056920B2 (ja) | コアレス電気機械装置 | |
| US8212446B2 (en) | Brushless electric machine and device comprising said machine | |
| KR101892961B1 (ko) | 코어리스모터 | |
| JP5359042B2 (ja) | ブラシレス電気機械、それを備えた装置、及び、移動体 | |
| CN106487181A (zh) | 旋转电机 | |
| JP5332260B2 (ja) | ブラシレス電気機械 | |
| JP5398274B2 (ja) | 永久磁石回転電機 | |
| JP4518148B2 (ja) | ブラシレス回転式モータ、ブラシレス回転式モータを備えたロボット及びブラシレス回転式モータを備えた移動体 | |
| CN105914911A (zh) | 定子、电机和空调器 | |
| JP5381072B2 (ja) | ブラシレス電気機械 | |
| JP5894414B2 (ja) | 発電機 | |
| CN106451985A (zh) | 定子结构及无刷直流电机 | |
| JP5555982B2 (ja) | ブラシレス電気機械 | |
| JP2010080485A (ja) | 永久磁石、永久磁石の製造方法及び永久磁石を用いた装置 | |
| JP2012210017A (ja) | アキシャルギャップ型電動機 | |
| JP2005086935A (ja) | 電磁誘導機 | |
| JP2010093911A (ja) | 電気機械装置及び電気機械装置を用いた装置 | |
| JP5228550B2 (ja) | 交流ブラシレス電気機械 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A521 | Written amendment |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20120913 |
|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20120913 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20130829 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20130910 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20140218 |
|
| A521 | Written amendment |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20140417 |
|
| A02 | Decision of refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A02 Effective date: 20141007 |
|
| A761 | Written withdrawal of application |
Free format text: JAPANESE INTERMEDIATE CODE: A761 Effective date: 20141007 |