JP2011090408A - 情報処理装置、その行動推定方法及びプログラム - Google Patents
情報処理装置、その行動推定方法及びプログラム Download PDFInfo
- Publication number
- JP2011090408A JP2011090408A JP2009241879A JP2009241879A JP2011090408A JP 2011090408 A JP2011090408 A JP 2011090408A JP 2009241879 A JP2009241879 A JP 2009241879A JP 2009241879 A JP2009241879 A JP 2009241879A JP 2011090408 A JP2011090408 A JP 2011090408A
- Authority
- JP
- Japan
- Prior art keywords
- person
- area
- video
- behavior
- action
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Pending
Links
Images








Classifications
-
- G—PHYSICS
- G06—COMPUTING; CALCULATING OR COUNTING
- G06V—IMAGE OR VIDEO RECOGNITION OR UNDERSTANDING
- G06V20/00—Scenes; Scene-specific elements
- G06V20/50—Context or environment of the image
- G06V20/52—Surveillance or monitoring of activities, e.g. for recognising suspicious objects
- G06V20/54—Surveillance or monitoring of activities, e.g. for recognising suspicious objects of traffic, e.g. cars on the road, trains or boats
-
- G—PHYSICS
- G06—COMPUTING; CALCULATING OR COUNTING
- G06V—IMAGE OR VIDEO RECOGNITION OR UNDERSTANDING
- G06V40/00—Recognition of biometric, human-related or animal-related patterns in image or video data
- G06V40/10—Human or animal bodies, e.g. vehicle occupants or pedestrians; Body parts, e.g. hands
- G06V40/16—Human faces, e.g. facial parts, sketches or expressions
- G06V40/172—Classification, e.g. identification
- G06V40/173—Classification, e.g. identification face re-identification, e.g. recognising unknown faces across different face tracks
Abstract
未撮影領域における人物の行動を推定できるようにした技術を提供する。
【解決手段】
情報処理装置は、撮像装置により現実空間が撮影された映像内から人物を含む人物抽出領域を抽出する抽出手段と、前記映像内に予め設定された1又は複数のエリアに対応して当該エリアに関する行動推定モデルを保持するモデル保持手段と、前記抽出手段により抽出された前記人物抽出領域の履歴に基づき前記映像内から人物が消失した前記エリアを同定する消失エリア同定手段と、前記同定された前記エリアに対応する行動推定モデルを前記モデル保持手段から取得する取得手段と、前記取得手段により取得された前記行動推定モデルを用いて前記映像内から消失した人物の消失後の行動を推定する行動推定手段とを具備する。
【選択図】 図1
Description
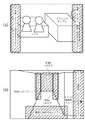
まず、本実施形態に係わる情報処理装置の監視対象について説明する。図1は、実施形態1に係わる監視対象領域の概要の一例が示されており、この場合、監視対象領域として3LDKのマンションの間取りが示される。
次に、実施形態2について説明する。実施形態2においては、視野の重なりのない複数台のカメラと、それぞれのカメラのそばにあるセンサと、それぞれのカメラから離れた場所にあるセンサとを用いて、一般家庭における人物の行動を推定等する場合を例に挙げて説明する。
本発明は、以下の処理を実行することによっても実現される。即ち、上述した実施形態の機能を実現するソフトウェア(プログラム)を、ネットワーク又は各種記憶媒体を介してシステム或いは装置に供給し、そのシステム或いは装置のコンピュータ(又はCPUやMPU等)がプログラムを読み出して実行する処理である。
Claims (13)
- 撮像装置により現実空間が撮影された映像内から人物を含む人物抽出領域を抽出する抽出手段と、
前記映像内に予め設定された1又は複数のエリアに対応して当該エリアに関する行動推定モデルを保持するモデル保持手段と、
前記抽出手段により抽出された前記人物抽出領域の履歴に基づき前記映像内から人物が消失した前記エリアを同定する消失エリア同定手段と、
前記同定された前記エリアに対応する行動推定モデルを前記モデル保持手段から取得する取得手段と、
前記取得手段により取得された前記行動推定モデルを用いて前記映像内から消失した人物の消失後の行動を推定する行動推定手段と
を具備することを特徴とする情報処理装置。 - 前記行動推定手段は、
前記映像内から人物が消失した時刻、前記映像内から人物が消失した時刻からの経過時間、の少なくとも1つに基づいて前記行動を推定する
ことを特徴とする請求項1記載の情報処理装置。 - 前記抽出手段により抽出された前記人物抽出領域の履歴に基づきに基づき前記映像内に人物が登場した前記エリアを同定する登場エリア同定手段
を更に具備し、
前記取得手段は、
前記登場エリア同定手段により同定されたエリアに対応する行動推定モデルを前記モデル保持手段から取得し、
前記行動推定手段は、
前記取得手段により取得された前記行動推定モデルを用いて前記映像内に登場した人物の登場前の行動を推定する
ことを特徴とする請求項1記載の情報処理装置。 - 前記行動推定手段は、
前記映像内に人物が登場した時刻、前記映像内から人物が消失した時刻から該人物が該映像内に再度登場するまでの時刻、の少なくとも1つに基づいて前記行動を推定する
ことを特徴とする請求項3記載の情報処理装置。 - 前記行動推定モデルは、
前記行動の推定を行なう時刻、前記人物が消失した時刻、前記人物が登場した時刻、前記人物が消失した後、再度登場するまでの時間を示す再登場時間、の内の少なくとも1つの条件情報と、当該条件情報に対応した行動推定結果を示す行動推定結果情報とを対応付けたリストである
ことを特徴とする請求項3記載の情報処理装置。 - 前記行動推定モデルは、
前記行動の推定を行なう時刻、前記人物が消失した時刻、前記人物が登場した時刻、前記人物が消失した後、再度登場するまでの時間を示す再登場時間、の内の少なくとも1つを変数として当該変数に対応した行動推定結果を示す行動推定結果情報を算出する関数である
ことを特徴とする請求項3記載の情報処理装置。 - 前記抽出手段は、
前記映像内における人物の特徴を認識する人物認識機能を有し、
前記モデル保持手段は、
人物毎に前記エリアに関する行動推定モデルを保持し、
前記取得手段は、
前記同定された前記エリアと、前記人物認識の結果とに対応する行動推定モデルを前記モデル保持手段から取得する
ことを特徴とする請求項1記載の情報処理装置。 - 前記行動推定手段は、
前記映像内から人物が消失する前の該人物の特徴と、前記映像内に再度登場した人物の特徴とに基づいて、前記映像内に登場した人物の前記登場前の行動を推定する
ことを特徴とする請求項7記載の情報処理装置。 - 前記モデル保持手段は、
前記現実空間における音声を計測するセンサからの出力値毎に前記エリアに関する行動推定モデルを保持し、
前記取得手段は、
前記同定された前記エリアと、前記センサの出力値とに対応する行動推定モデルを前記モデル保持手段から取得する
ことを特徴とする請求項1記載の情報処理装置。 - 前記行動推定手段により推定された行動の履歴を要約して提示、該履歴を前記人物のライフログデータとして提示、該履歴を健康医療データとして提示、の少なくとも1つを行なう記録提示手段
を更に具備することを特徴とする請求項1記載の情報処理装置。 - 撮像装置により現実空間が撮影された映像内から人物を含む人物抽出領域を抽出する抽出手段と、
前記映像内に予め設定された1又は複数のエリアに対応して当該エリアに関する行動推定モデルを保持するモデル保持手段と、
前記抽出手段により抽出された前記人物抽出領域の履歴に基づき前記映像内に人物が登場した前記エリアを同定する登場エリア同定手段と、
前記同定された前記エリアに対応する行動推定モデルを前記モデル保持手段から取得する取得手段と、
前記取得手段により取得された前記行動推定モデルを用いて前記映像内に登場した人物の登場前の行動を推定する行動推定手段と
を具備することを特徴とする情報処理装置。 - 情報処理装置における行動推定方法であって、
抽出手段が、撮像装置により現実空間が撮影された映像内から人物を含む人物抽出領域を抽出する工程と、
モデル保持手段が、前記映像内に予め設定された1又は複数のエリアに対応して当該エリアに関する行動推定モデルを保持する工程と、
消失エリア同定手段が、前記抽出手段により抽出された前記人物抽出領域の履歴に基づき前記映像内から人物が消失した前記エリアを同定する工程と、
取得手段が、前記同定された前記エリアに対応する行動推定モデルを前記モデル保持手段から取得する工程と、
行動推定手段が、前記取得手段により取得された前記行動推定モデルを用いて前記映像内から消失した人物の消失後の行動を推定する工程と
を含むことを特徴とする行動推定方法。 - コンピュータを、
撮像装置により現実空間が撮影された映像内から人物を含む人物抽出領域を抽出する抽出手段、
前記映像内に予め設定された1又は複数のエリアに対応して当該エリアに関する行動推定モデルを保持するモデル保持手段、
前記抽出手段により抽出された前記人物抽出領域の履歴に基づき前記映像内から人物が消失した前記エリアを同定する消失エリア同定手段、
前記同定された前記エリアに対応する行動推定モデルを前記モデル保持手段から取得する取得手段、
前記取得手段により取得された前記行動推定モデルを用いて前記映像内から消失した人物の消失後の行動を推定する行動推定手段
として機能させるためのプログラム。
Priority Applications (2)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2009241879A JP2011090408A (ja) | 2009-10-20 | 2009-10-20 | 情報処理装置、その行動推定方法及びプログラム |
| US12/877,479 US20110091069A1 (en) | 2009-10-20 | 2010-09-08 | Information processing apparatus and method, and computer-readable storage medium |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2009241879A JP2011090408A (ja) | 2009-10-20 | 2009-10-20 | 情報処理装置、その行動推定方法及びプログラム |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2011090408A true JP2011090408A (ja) | 2011-05-06 |
| JP2011090408A5 JP2011090408A5 (ja) | 2012-12-06 |
Family
ID=43879314
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2009241879A Pending JP2011090408A (ja) | 2009-10-20 | 2009-10-20 | 情報処理装置、その行動推定方法及びプログラム |
Country Status (2)
| Country | Link |
|---|---|
| US (1) | US20110091069A1 (ja) |
| JP (1) | JP2011090408A (ja) |
Cited By (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US9547926B2 (en) | 2009-04-24 | 2017-01-17 | International Business Machines Corporation | Displaying nodes visually offset from associated components |
| JP2017191621A (ja) * | 2016-03-30 | 2017-10-19 | 日本電気株式会社 | 解析装置、解析方法及びプログラム |
| WO2021111631A1 (ja) * | 2019-12-06 | 2021-06-10 | 株式会社Plasma | 分析装置、分析方法及びプログラム |
| WO2021131682A1 (ja) * | 2019-12-23 | 2021-07-01 | ソニーグループ株式会社 | 情報処理装置、情報処理方法、およびプログラム |
Families Citing this family (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| KR20120090565A (ko) * | 2011-02-08 | 2012-08-17 | 삼성전자주식회사 | 영상 데이터의 실감 효과 처리장치 및 방법 |
| US10147290B2 (en) * | 2015-05-05 | 2018-12-04 | Andre Green | Tent alarm system |
| EP3340609B1 (en) | 2016-12-22 | 2024-03-27 | Samsung Electronics Co., Ltd. | Apparatus and method for processing image |
| CA3035191A1 (en) * | 2019-02-28 | 2020-08-28 | Fian Technologies Inc. | Hand washing monitoring device, system and method |
| CN114124421B (zh) * | 2020-08-31 | 2024-04-12 | 深圳市中兴微电子技术有限公司 | Acl规则处理方法、装置、计算机设备和可读介质 |
Citations (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2002373388A (ja) * | 2001-06-14 | 2002-12-26 | Matsushita Electric Works Ltd | 人体検知装置 |
| JP2004185431A (ja) * | 2002-12-04 | 2004-07-02 | Sekisui Chem Co Ltd | 生活状況環境表現装置及び表現装置 |
| JP2005199403A (ja) * | 2004-01-16 | 2005-07-28 | Sony Corp | 情動認識装置及び方法、ロボット装置の情動認識方法、ロボット装置の学習方法、並びにロボット装置 |
| JP2008052626A (ja) * | 2006-08-28 | 2008-03-06 | Matsushita Electric Works Ltd | 浴室異常検知システム |
Family Cites Families (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US6449593B1 (en) * | 2000-01-13 | 2002-09-10 | Nokia Mobile Phones Ltd. | Method and system for tracking human speakers |
| JP3406965B2 (ja) * | 2000-11-24 | 2003-05-19 | キヤノン株式会社 | 複合現実感提示装置及びその制御方法 |
| AU2003265284A1 (en) * | 2002-07-19 | 2004-02-09 | Dicut Inc. | Face recognition system and method therefor |
| US20070237387A1 (en) * | 2006-04-11 | 2007-10-11 | Shmuel Avidan | Method for detecting humans in images |
| JP4881766B2 (ja) * | 2007-03-06 | 2012-02-22 | パナソニック株式会社 | カメラ間連結関係情報生成装置 |
-
2009
- 2009-10-20 JP JP2009241879A patent/JP2011090408A/ja active Pending
-
2010
- 2010-09-08 US US12/877,479 patent/US20110091069A1/en not_active Abandoned
Patent Citations (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2002373388A (ja) * | 2001-06-14 | 2002-12-26 | Matsushita Electric Works Ltd | 人体検知装置 |
| JP2004185431A (ja) * | 2002-12-04 | 2004-07-02 | Sekisui Chem Co Ltd | 生活状況環境表現装置及び表現装置 |
| JP2005199403A (ja) * | 2004-01-16 | 2005-07-28 | Sony Corp | 情動認識装置及び方法、ロボット装置の情動認識方法、ロボット装置の学習方法、並びにロボット装置 |
| JP2008052626A (ja) * | 2006-08-28 | 2008-03-06 | Matsushita Electric Works Ltd | 浴室異常検知システム |
Cited By (11)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US9547926B2 (en) | 2009-04-24 | 2017-01-17 | International Business Machines Corporation | Displaying nodes visually offset from associated components |
| US10268346B2 (en) | 2009-04-24 | 2019-04-23 | International Business Machines Corporation | Displaying nodes visually offset from associated components |
| US10503369B2 (en) | 2009-04-24 | 2019-12-10 | International Business Machines Corporation | Displaying nodes visually offset from associated components |
| US10534501B2 (en) | 2009-04-24 | 2020-01-14 | International Business Machines Corporation | Displaying nodes visually offset from associated components |
| US11073966B2 (en) | 2009-04-24 | 2021-07-27 | International Business Machines Corporation | Displaying nodes visually offset from associated components |
| JP2017191621A (ja) * | 2016-03-30 | 2017-10-19 | 日本電気株式会社 | 解析装置、解析方法及びプログラム |
| JP2019153296A (ja) * | 2016-03-30 | 2019-09-12 | 日本電気株式会社 | 解析装置、解析方法及びプログラム |
| US11094076B2 (en) | 2016-03-30 | 2021-08-17 | Nec Corporation | Analysis apparatus, analysis method, and storage medium |
| US11176698B2 (en) | 2016-03-30 | 2021-11-16 | Nec Corporation | Analysis apparatus, analysis method, and storage medium |
| WO2021111631A1 (ja) * | 2019-12-06 | 2021-06-10 | 株式会社Plasma | 分析装置、分析方法及びプログラム |
| WO2021131682A1 (ja) * | 2019-12-23 | 2021-07-01 | ソニーグループ株式会社 | 情報処理装置、情報処理方法、およびプログラム |
Also Published As
| Publication number | Publication date |
|---|---|
| US20110091069A1 (en) | 2011-04-21 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP2011090408A (ja) | 情報処理装置、その行動推定方法及びプログラム | |
| CN110543102B (zh) | 一种控制智能家居设备的方法、装置及计算机存储介质 | |
| US10229571B2 (en) | Systems and methods for determining whether an individual suffers a fall requiring assistance | |
| US20230267728A1 (en) | User interfaces to configure a thermal imaging system | |
| US10095930B2 (en) | System and method for home health care monitoring | |
| JP6411373B2 (ja) | 認識データ伝送装置、認識データ記録装置及び認識データ記録方法 | |
| US9741227B1 (en) | Method and process for determining whether an individual suffers a fall requiring assistance | |
| Leone et al. | Detecting falls with 3D range camera in ambient assisted living applications: A preliminary study | |
| Zouba et al. | A computer system to monitor older adults at home: Preliminary results | |
| Zouba et al. | Multisensor fusion for monitoring elderly activities at home | |
| Debard et al. | Camera-based fall detection using real-world versus simulated data: How far are we from the solution? | |
| US11925304B2 (en) | Information processing method, information processing apparatus and computer-readable recording medium storing information processing program | |
| GB2525476A (en) | Method and device for monitoring at least one interior of a building, and assistance system for at least one interior of a building | |
| JP5473750B2 (ja) | 情報処理装置、情報処理方法及びプログラム | |
| WO2021084949A1 (ja) | 情報処理装置、情報処理方法およびプログラム | |
| JP2019185185A (ja) | 画像処理システム及びプログラム | |
| JP7388200B2 (ja) | リハビリテーションを支援する情報の提供の方法およびリハビリテーション支援システム | |
| US20160171378A1 (en) | Time out-of-home monitoring | |
| JP2020021237A (ja) | 火災警報制御装置および火災警報システム | |
| Debard et al. | Camera-based fall detection using real-world versus simulated data: how far are we from the solution? | |
| JP7465644B2 (ja) | 監視システム、及び監視方法 | |
| JP7215481B2 (ja) | コンピューターで実行されるプログラム、情報処理装置、および、コンピューターで実行される方法 | |
| CN112426100B (zh) | 一种控制方法、装置及存储介质 | |
| Mailland et al. | Original research A computer system to monitor older adults at home: Preliminary results | |
| JP6899358B2 (ja) | 宅内管理システム、宅内管理プログラム、および宅内管理方法 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20121022 |
|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20121022 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20130717 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20130726 |
|
| A02 | Decision of refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A02 Effective date: 20131202 |