JP2010516088A - カプセルカメラにおける製造ばらつき及び設計的不完全性を補正する方法 - Google Patents
カプセルカメラにおける製造ばらつき及び設計的不完全性を補正する方法 Download PDFInfo
- Publication number
- JP2010516088A JP2010516088A JP2009544872A JP2009544872A JP2010516088A JP 2010516088 A JP2010516088 A JP 2010516088A JP 2009544872 A JP2009544872 A JP 2009544872A JP 2009544872 A JP2009544872 A JP 2009544872A JP 2010516088 A JP2010516088 A JP 2010516088A
- Authority
- JP
- Japan
- Prior art keywords
- image
- camera
- pixel
- pixels
- image sensor
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Pending
Links
- 238000000034 method Methods 0.000 title claims abstract description 110
- 239000002775 capsule Substances 0.000 title claims description 100
- 238000004519 manufacturing process Methods 0.000 title abstract description 13
- 238000013461 design Methods 0.000 title description 10
- 230000003287 optical effect Effects 0.000 claims abstract description 22
- 230000006870 function Effects 0.000 claims description 37
- 238000012937 correction Methods 0.000 claims description 33
- 238000005286 illumination Methods 0.000 claims description 27
- 238000012545 processing Methods 0.000 claims description 17
- 238000007906 compression Methods 0.000 claims description 10
- 230000006835 compression Effects 0.000 claims description 10
- 230000001419 dependent effect Effects 0.000 claims description 9
- 230000004044 response Effects 0.000 claims description 9
- 230000004043 responsiveness Effects 0.000 claims description 8
- 238000012512 characterization method Methods 0.000 claims description 7
- 238000005259 measurement Methods 0.000 claims description 6
- 238000006073 displacement reaction Methods 0.000 claims description 3
- 239000007788 liquid Substances 0.000 claims description 3
- 238000013507 mapping Methods 0.000 claims description 3
- 238000009529 body temperature measurement Methods 0.000 claims 1
- 230000007547 defect Effects 0.000 abstract description 2
- 238000012360 testing method Methods 0.000 description 26
- 210000001035 gastrointestinal tract Anatomy 0.000 description 10
- 230000008569 process Effects 0.000 description 6
- 239000003086 colorant Substances 0.000 description 4
- 230000007423 decrease Effects 0.000 description 4
- 230000000694 effects Effects 0.000 description 4
- 239000004065 semiconductor Substances 0.000 description 4
- 239000000872 buffer Substances 0.000 description 3
- 238000003384 imaging method Methods 0.000 description 3
- 239000000463 material Substances 0.000 description 3
- 230000005855 radiation Effects 0.000 description 3
- 238000004364 calculation method Methods 0.000 description 2
- 238000003759 clinical diagnosis Methods 0.000 description 2
- 238000013144 data compression Methods 0.000 description 2
- 238000003702 image correction Methods 0.000 description 2
- 210000002429 large intestine Anatomy 0.000 description 2
- 210000000813 small intestine Anatomy 0.000 description 2
- 238000001228 spectrum Methods 0.000 description 2
- 210000002784 stomach Anatomy 0.000 description 2
- 230000036962 time dependent Effects 0.000 description 2
- XLYOFNOQVPJJNP-UHFFFAOYSA-N water Substances O XLYOFNOQVPJJNP-UHFFFAOYSA-N 0.000 description 2
- 230000009471 action Effects 0.000 description 1
- 230000004913 activation Effects 0.000 description 1
- 239000000654 additive Substances 0.000 description 1
- 230000000996 additive effect Effects 0.000 description 1
- 230000004888 barrier function Effects 0.000 description 1
- 210000001124 body fluid Anatomy 0.000 description 1
- 239000010839 body fluid Substances 0.000 description 1
- 230000036760 body temperature Effects 0.000 description 1
- 230000003139 buffering effect Effects 0.000 description 1
- 230000008859 change Effects 0.000 description 1
- 238000006243 chemical reaction Methods 0.000 description 1
- 230000000295 complement effect Effects 0.000 description 1
- 238000011109 contamination Methods 0.000 description 1
- 238000013480 data collection Methods 0.000 description 1
- 238000013500 data storage Methods 0.000 description 1
- 238000001514 detection method Methods 0.000 description 1
- 230000001079 digestive effect Effects 0.000 description 1
- 238000005516 engineering process Methods 0.000 description 1
- 210000003238 esophagus Anatomy 0.000 description 1
- 238000000605 extraction Methods 0.000 description 1
- 239000011521 glass Substances 0.000 description 1
- 230000036541 health Effects 0.000 description 1
- 238000001727 in vivo Methods 0.000 description 1
- 210000000936 intestine Anatomy 0.000 description 1
- 230000000670 limiting effect Effects 0.000 description 1
- 238000007726 management method Methods 0.000 description 1
- 229910044991 metal oxide Inorganic materials 0.000 description 1
- 150000004706 metal oxides Chemical class 0.000 description 1
- 238000012986 modification Methods 0.000 description 1
- 230000004048 modification Effects 0.000 description 1
- 238000003032 molecular docking Methods 0.000 description 1
- 231100000252 nontoxic Toxicity 0.000 description 1
- 230000003000 nontoxic effect Effects 0.000 description 1
- 230000036961 partial effect Effects 0.000 description 1
- 239000002245 particle Substances 0.000 description 1
- 230000008855 peristalsis Effects 0.000 description 1
- 229920000642 polymer Polymers 0.000 description 1
- 210000001747 pupil Anatomy 0.000 description 1
- 230000009467 reduction Effects 0.000 description 1
- 230000002829 reductive effect Effects 0.000 description 1
- 230000003252 repetitive effect Effects 0.000 description 1
- 230000002441 reversible effect Effects 0.000 description 1
- 238000012552 review Methods 0.000 description 1
- 230000001360 synchronised effect Effects 0.000 description 1
- 230000002123 temporal effect Effects 0.000 description 1
- 230000009466 transformation Effects 0.000 description 1
- 238000009966 trimming Methods 0.000 description 1
Images









Classifications
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B1/00—Instruments for performing medical examinations of the interior of cavities or tubes of the body by visual or photographical inspection, e.g. endoscopes; Illuminating arrangements therefor
- A61B1/04—Instruments for performing medical examinations of the interior of cavities or tubes of the body by visual or photographical inspection, e.g. endoscopes; Illuminating arrangements therefor combined with photographic or television appliances
- A61B1/041—Capsule endoscopes for imaging
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B1/00—Instruments for performing medical examinations of the interior of cavities or tubes of the body by visual or photographical inspection, e.g. endoscopes; Illuminating arrangements therefor
- A61B1/00002—Operational features of endoscopes
- A61B1/00057—Operational features of endoscopes provided with means for testing or calibration
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B1/00—Instruments for performing medical examinations of the interior of cavities or tubes of the body by visual or photographical inspection, e.g. endoscopes; Illuminating arrangements therefor
- A61B1/06—Instruments for performing medical examinations of the interior of cavities or tubes of the body by visual or photographical inspection, e.g. endoscopes; Illuminating arrangements therefor with illuminating arrangements
- A61B1/0661—Endoscope light sources
- A61B1/0684—Endoscope light sources using light emitting diodes [LED]
-
- H—ELECTRICITY
- H04—ELECTRIC COMMUNICATION TECHNIQUE
- H04N—PICTORIAL COMMUNICATION, e.g. TELEVISION
- H04N17/00—Diagnosis, testing or measuring for television systems or their details
- H04N17/002—Diagnosis, testing or measuring for television systems or their details for television cameras
-
- H—ELECTRICITY
- H04—ELECTRIC COMMUNICATION TECHNIQUE
- H04N—PICTORIAL COMMUNICATION, e.g. TELEVISION
- H04N23/00—Cameras or camera modules comprising electronic image sensors; Control thereof
- H04N23/50—Constructional details
-
- H—ELECTRICITY
- H04—ELECTRIC COMMUNICATION TECHNIQUE
- H04N—PICTORIAL COMMUNICATION, e.g. TELEVISION
- H04N23/00—Cameras or camera modules comprising electronic image sensors; Control thereof
- H04N23/50—Constructional details
- H04N23/555—Constructional details for picking-up images in sites, inaccessible due to their dimensions or hazardous conditions, e.g. endoscopes or borescopes
-
- H—ELECTRICITY
- H04—ELECTRIC COMMUNICATION TECHNIQUE
- H04N—PICTORIAL COMMUNICATION, e.g. TELEVISION
- H04N25/00—Circuitry of solid-state image sensors [SSIS]; Control thereof
- H04N25/60—Noise processing, e.g. detecting, correcting, reducing or removing noise
- H04N25/63—Noise processing, e.g. detecting, correcting, reducing or removing noise applied to dark current
-
- H—ELECTRICITY
- H04—ELECTRIC COMMUNICATION TECHNIQUE
- H04N—PICTORIAL COMMUNICATION, e.g. TELEVISION
- H04N25/00—Circuitry of solid-state image sensors [SSIS]; Control thereof
- H04N25/60—Noise processing, e.g. detecting, correcting, reducing or removing noise
- H04N25/63—Noise processing, e.g. detecting, correcting, reducing or removing noise applied to dark current
- H04N25/633—Noise processing, e.g. detecting, correcting, reducing or removing noise applied to dark current by using optical black pixels
-
- H—ELECTRICITY
- H04—ELECTRIC COMMUNICATION TECHNIQUE
- H04N—PICTORIAL COMMUNICATION, e.g. TELEVISION
- H04N25/00—Circuitry of solid-state image sensors [SSIS]; Control thereof
- H04N25/60—Noise processing, e.g. detecting, correcting, reducing or removing noise
- H04N25/67—Noise processing, e.g. detecting, correcting, reducing or removing noise applied to fixed-pattern noise, e.g. non-uniformity of response
- H04N25/671—Noise processing, e.g. detecting, correcting, reducing or removing noise applied to fixed-pattern noise, e.g. non-uniformity of response for non-uniformity detection or correction
-
- H—ELECTRICITY
- H04—ELECTRIC COMMUNICATION TECHNIQUE
- H04N—PICTORIAL COMMUNICATION, e.g. TELEVISION
- H04N25/00—Circuitry of solid-state image sensors [SSIS]; Control thereof
- H04N25/60—Noise processing, e.g. detecting, correcting, reducing or removing noise
- H04N25/67—Noise processing, e.g. detecting, correcting, reducing or removing noise applied to fixed-pattern noise, e.g. non-uniformity of response
- H04N25/671—Noise processing, e.g. detecting, correcting, reducing or removing noise applied to fixed-pattern noise, e.g. non-uniformity of response for non-uniformity detection or correction
- H04N25/673—Noise processing, e.g. detecting, correcting, reducing or removing noise applied to fixed-pattern noise, e.g. non-uniformity of response for non-uniformity detection or correction by using reference sources
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B1/00—Instruments for performing medical examinations of the interior of cavities or tubes of the body by visual or photographical inspection, e.g. endoscopes; Illuminating arrangements therefor
- A61B1/00002—Operational features of endoscopes
- A61B1/00059—Operational features of endoscopes provided with identification means for the endoscope
Landscapes
- Engineering & Computer Science (AREA)
- Health & Medical Sciences (AREA)
- Life Sciences & Earth Sciences (AREA)
- Surgery (AREA)
- Multimedia (AREA)
- Signal Processing (AREA)
- Physics & Mathematics (AREA)
- General Health & Medical Sciences (AREA)
- Optics & Photonics (AREA)
- Biomedical Technology (AREA)
- Medical Informatics (AREA)
- Veterinary Medicine (AREA)
- Pathology (AREA)
- Heart & Thoracic Surgery (AREA)
- Nuclear Medicine, Radiotherapy & Molecular Imaging (AREA)
- Molecular Biology (AREA)
- Animal Behavior & Ethology (AREA)
- Biophysics (AREA)
- Public Health (AREA)
- Radiology & Medical Imaging (AREA)
- Microelectronics & Electronic Packaging (AREA)
- Endoscopes (AREA)
- Studio Devices (AREA)
- Instruments For Viewing The Inside Of Hollow Bodies (AREA)
- Transforming Light Signals Into Electric Signals (AREA)
- Image Input (AREA)
- Exposure Control For Cameras (AREA)
- Stroboscope Apparatuses (AREA)
- Closed-Circuit Television Systems (AREA)
- Testing, Inspecting, Measuring Of Stereoscopic Televisions And Televisions (AREA)
Abstract
【解決手段】一実施形態では、カメラの特性を調整する方法には、(a)制御された状況下で光学素子の視野を照射するステップと、(b)その制御された状況下で複数の画像をイメージセンサ上へ露出するステップと、(c)それら複数の画像から、イメージセンサ上へ提供された画像のモデルのパラメータ値を抽出するステップと、(d)当該パラメータ値を用いて、カメラでそれ以降に撮影される画像を補正するステップとが含まれる。
Description

1.空間周波数スペクトルの高周波数成分を最小にする。
2.エッジ部を検出するための画像処理アルゴリズムを用いて画像のシャープなエッジ部を最小にする。
3.連続する画像間の変化を最小にする。通常、或る画像領域内のカプセルに接触する媒体はフレーム毎に同じなので、カプセルハウジング10の外面からのLED反射に対する各ピクセルの適切な補正はフレーム毎に不変である。補正が正しく(すなわち適切な較正データセットを用いて)識別されるならば、画像の変化は最大にされる。
4.非負の補正されたピクセル信号のみを生じる。負数は、間違った較正データセットが適用されていることを示す。
Claims (101)
- イメージセンサの特性を調整する方法であって、
制御された状況下で前記イメージセンサを照射するステップと、
前記制御された状況下で複数の画像を前記イメージセンサ上へ露出するステップと、
前記複数の画像から、前記イメージセンサ上へ露出された画像のモデルのパラメータ値を抽出するステップと、
前記パラメータ値を用いて、前記イメージセンサでそれ以降に撮影される画像を補正するステップとを含むことを特徴とする方法。 - 前記イメージセンサに、所定の色、コントラストまたはパターンを有する物体を露出するステップをさらに含むことを特徴とする請求項1の方法。
- 前記イメージセンサを照射するための外部光源を提供することによって前記制御された状況を準備するステップをさらに含むことを特徴とする請求項1の方法。
- 前記イメージセンサが、複数の色成分に敏感であることを特徴とする請求項3の方法。
- 前記露出するステップが、前記複数の色成分の各々に対して所定の光強度での照射を提供するステップを含むことを特徴とする請求項4の方法。
- 物体が、前記複数の画像における所定のパターンを提供することを特徴とする請求項5の方法。
- 前記制御された状況下で撮影された前記画像をアーカイブメモリに記憶するステップをさらに含むことを特徴とする請求項1の方法。
- 計算されたパラメータをアーカイブメモリに記憶するステップをさらに含むことを特徴とする請求項1の方法。
- 前記パラメータ値が、方程式、曲線、区分的曲線、ルックアップテーブルからなる群から選択される形式で表されることを特徴とする請求項1の方法。
- 様々な温度で1若しくは複数のダークピクセルからの信号を測定するステップをさらに含むことを特徴とする請求項9の方法。
- 前記画像を補正するステップが、前記画像がキャプチャされた温度を測定し、温度測定値を前記モデルへの入力データとして用いるステップをさらに含むことを特徴とする請求項9の方法。
- 前記画像を補正するステップが、前記画像がキャプチャされた温度と実質的に等しい温度で画像がキャプチャされる前または後に、所定の時間内に1若しくは複数のダークピクセルを測定し、前記ダークピクセルの前記測定結果を前記モデルへの入力データとして用いるステップをさらに含むことを特徴とする請求項9の方法。
- 前記画像の前記モデルが、ピクセル間ばらつきを補正するための関数を含むことを特徴とする請求項1の方法。
- 前記関数が、画像の測定値と乗算ファクタの積を含むことを特徴とする請求項13の方法。
- 前記関数が、複数のピクセルにわたる平均ピクセル値を補正することを特徴とする請求項13の方法。
- 前記関数が、不均一なピクセル応答性を補正することを特徴とする請求項13の方法。
- 前記関数が、平均ピクセル値を補正することを特徴とする請求項13の方法。
- 前記関数が、制御された状況から得られる期待ピクセル値に基づくことを特徴とする請求項13の方法。
- 前記画像の前記モデルが、前記イメージセンサの或るピクセルにおいて漏れ電流を補正するための加算ファクタを含むことを特徴とする請求項1の方法。
- 前記漏れ電流が、露出時間にわたって積分されることを特徴とする請求項19の方法。
- 前記加算ファクタが、温度に依存することを特徴とする請求項19の方法。
- 前記パラメータ値が、各ピクセルに対して、該ピクセルの補正のために計算されることを特徴とする請求項1の方法。
- 前記パラメータ値が、ピクセル群に基づいて計算され、
前記計算されたパラメータ値が、その後、補正のために前記ピクセル群の各ピクセルに適用されることを特徴とする請求項1の方法。 - 前記ピクセル群が、矩形領域内のピクセルから選択されることを特徴とする請求項23の方法。
- 前記補正画像を圧縮するステップをさらに含むことを特徴とする請求項1の方法。
- 前記圧縮画像を外部の保管場所へ送信するステップをさらに含むことを特徴とする請求項25の方法。
- 前記イメージセンサが、識別子と関連付けられており、
前記画像が、送信される前記圧縮画像を識別するべく前記識別子と共に送信されることを特徴とする請求項26の方法。 - 前記圧縮画像が、アーカイブメモリに記憶されることを特徴とする請求項26の方法。
- 撮影された画像を外部の保管場所に送信するステップをさらに含むことを特徴とする請求項1の方法。
- 前記イメージセンサが、識別子と関連付けられており、
前記画像が、送信される前記画像を識別するべく前記識別子と共に送信されることを特徴とする請求項29の方法。 - 前記制御された状況を、前記カメラ内から照明系を提供することによって準備するステップをさらに含むことを特徴とする請求項1の方法。
- 前記モデルが、反射光のための補正項を含むことを特徴とする請求項31の方法。
- 前記補正項が、発光ダイオードの電流の関数であることを特徴とする請求項32の方法。
- 前記補正項が、さらに露出時間の関数であることを特徴とする請求項33の方法。
- 前記イメージセンサが、複数の光学素子を有するカメラ内に設けられ、
前記方法が、前記イメージセンサとは無関係に前記光学素子の特性を調整するステップをさらに含み、
前記画像が、前記光学素子と前記パラメータ値の両方の特性調整を用いて補正されることを特徴とする請求項34の方法。 - カメラであって、
イメージセンサと、
前記カメラで撮影された画像のモデルに基づき生成される特性調整データの記録保存手段とを含み、
前記特性調整データが、前記イメージセンサ上に投影された複数の画像から得られることを特徴とするカメラ。 - 前記記録保存手段が、記憶装置を含むことを特徴とする請求項36のカメラ。
- 前記記録保存手段が、前記記録を外部記録装置に送信するための送信機を含むことを特徴とする請求項36のカメラ。
- 前記カメラが、識別子と関連付けられており、
前記記録が、その後に、前記識別子を用いて前記外部記録装置から検索されることを特徴とする請求項36のカメラ。 - 前記モデルが、ピクセル間ばらつきを補正するための乗算ファクタを含むことを特徴とする請求項36のカメラ。
- 或る画像を、該画像における前記ピクセル間ばらつきを補正した後に圧縮する手段をさらに含むことを特徴とする請求項36のカメラ。
- 前記投影された画像が、所定の色、コントラストまたはパターンの視野に提供された物体のものであることを特徴とする請求項36のカメラ。
- 前記イメージセンサが、複数の色成分に敏感であることを特徴とする請求項36のカメラ。
- 前記カメラが、前記撮影された画像を記憶するためのアーカイブメモリをさらに含むことを特徴とする請求項36のカメラ。
- 計算されたパラメータを記憶するためのアーカイブメモリをさらに含むことを特徴とする請求項36のカメラ。
- 前記モデルが、温度に依存することを特徴とする請求項36のカメラ。
- 前記画像の前記モデルが、ピクセル間ばらつきを補正するための関数を含むことを特徴とする請求項36のカメラ。
- 前記関数が、画像の測定値と乗算ファクタの積を含むことを特徴とする請求項36のカメラ。
- 前記関数が、複数のピクセルにわたる平均ピクセル値を補正することを特徴とする請求項36のカメラ。
- 前記関数が、不均一なピクセル応答性を補正することを特徴とする請求項36のカメラ。
- 前記関数が、平均ピクセル値を補正することを特徴とする請求項36のカメラ。
- 前記関数が、制御された状況から得られる期待ピクセル値に基づくことを特徴とする請求項36のカメラ。
- 前記画像の前記モデルが、前記イメージセンサのピクセルにおける漏れ電流を補正するための加算ファクタを含むことを特徴とする請求項36のカメラ。
- 前記漏れ電流が、露出時間にわたって積分されることを特徴とする請求項53のカメラ。
- 前記加算ファクタが、温度に依存することを特徴とする請求項53のカメラ。
- 前記特性調整データが、各ピクセルに対して、該ピクセルの補正のために計算されることを特徴とする請求項36のカメラ。
- 前記特性調整データが、ピクセル群に基づいて計算され、
前記計算されたパラメータ値が、その後、補正のために前記ピクセル群の各ピクセルに適用されることを特徴とする請求項36のカメラ。 - 前記ピクセル群が、矩形領域内のピクセルから選択されることを特徴とする請求項57のカメラ。
- 前記カメラが、圧縮補正画像を記憶することを特徴とする請求項36のカメラ。
- 前記カメラが、前記圧縮画像を外部の保管場所に送信するための送信機をさらに含むことを特徴とする請求項59のカメラ。
- 前記カメラが、識別子と関連付けられており、
前記送信機が、前記画像を、送信される前記圧縮画像を識別するべく前記識別子と共に送信することを特徴とする請求項60のカメラ。 - 前記圧縮画像が、アーカイブメモリに記憶されることを特徴とする請求項61のカメラ。
- 前記カメラが、撮影された画像を外部の保管場所に送信するための送信機をさらに含むことを特徴とする請求項36のカメラ。
- 前記カメラが、識別子と関連付けられており、
前記送信機が、前記画像を、送信される前記画像を識別するべく前記識別子と共に送信することを特徴とする請求項63のカメラ。 - 前記イメージセンサを封入する透明ハウジングと、
前記特性調整データを作成するために制御された状況を準備するための、前記透明ハウジング内の光源とをさらに含むことを特徴とする請求項36のカメラ。 - 前記制御された状況を準備するために光吸収環境を提供する手段をさらに含むことを特徴とする請求項65のカメラ。
- 前記モデルが、前記透明ハウジングから反射される光のための補正項を含むことを特徴とする請求項65のカメラ。
- 前記補正項が、発光ダイオードの電流の関数であることを特徴とする請求項67のカメラ。
- 前記補正項が、さらに露出時間の関数であることを特徴とする請求項68のカメラ。
- 前記モデルが、複数のピクセルにわたる平均ピクセル値を補正するための乗算ファクタを含むことを特徴とする請求項35のカメラ。
- 前記特性調整データが、所定の特性の外部光源に基づいて露出を行うことによって得られることを特徴とする請求項35のカメラ。
- 透明ハウジング及び前記透明ハウジング内の光源を有するカメラの特性を調整する方法であって、
前記カメラを光吸収環境内に載置し、第1の複数の露出を行うステップと、
前記カメラを視野依存性の反射率環境内に載置し、第2の複数の露出を行うステップと、
第1及び第2の複数の露出を処理し、前記カメラで撮影された画像のモデルのパラメータ値を抽出するステップとを含むことを特徴とする方法。 - 前記第1の複数の露出が、前記カメラ内の照明系を用いて行われることを特徴とする請求項72の方法。
- 前記第1の複数の露出が、異なる相対照度に対して行われることを特徴とする請求項72の方法。
- 前記第2の複数の露出が、異なる露出時間に対して行われることを特徴とする請求項72の方法。
- 前記第1及び第2の複数の露出のうちの一部が、液体環境において行われることを特徴とする請求項72の方法。
- 前記パラメータ値に基づいて、前記カメラによって撮影された画像を補正するステップをさらに含むことを特徴とする請求項72の方法。
- 前記モデルが、前記イメージセンサにおいて検知されるような、前記第1及び第2の複数の露出に基づくことを特徴とする請求項72の方法。
- 前記モデルが、ピクセル間ばらつきを補正する関数を含むことを特徴とする請求項78の方法。
- 前記関数が、温度に依存することを特徴とする請求項79の方法。
- 前記関数が、複数のピクセルにわたる不均一なピクセル応答性を補正するための項を含むことを特徴とする請求項79の方法。
- 前記関数が、前記イメージセンサの或るピクセルにおいて漏れ電流を補正するための項を含むことを特徴とする請求項79の方法。
- 前記漏れ電流が、露出時間にわたって積分されることを特徴とする請求項82の方法。
- 前記関数が、発光ダイオードの電流に基づくことを特徴とする請求項79の方法。
- 前記電流が、露出時間の関数であることを特徴とする請求項84の方法。
- 前記抽出されたパラメータ値が、ピクセル群に基づいて計算され、
前記計算されたパラメータ値が、その後、補正のために前記ピクセル群の各ピクセルに適用されることを特徴とする請求項79の方法。 - 前記抽出されたパラメータ値が、各ピクセルに対して計算され、
前記計算されたパラメータ値が、それ以降の露出において該ピクセルに適用されることを特徴とする請求項79の方法。 - 前記第1及び第2の複数の露出が、前記カメラ内のアーカイブメモリに記憶されることを特徴とする請求項74の方法。
- 前記抽出された係数またはパラメータが、前記カメラ内のアーカイブメモリに記憶されることを特徴とする請求項74の方法。
- 前記第1及び第2の複数の露出が、記憶のために外部受信機に送信されることを特徴とする請求項74の方法。
- 前記抽出されたパラメータ値が、記憶のために外部受信機に送信されることを特徴とする請求項74の方法。
- 前記カメラが、識別情報と関連付けられており、
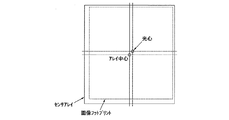
前記第1及び第2の複数の画像が、補正するステップに用いるための後々の検索ができるように前記識別情報と共に送信されることを特徴とする請求項74の方法。 - 2次元アレイの画素(ピクセル)として作られたセンサアレイを有するカメラを効率よく操作する方法であって、
前記センサアレイ上に或る画像を提供するステップと、
前記2次元アレイの第1の次元に沿って前記ピクセルの応答を測定し、前記画像の第1のエッジ部及び前記画像の第2のエッジ部を検出するステップと、
前記2次元アレイの第2の次元に沿って前記ピクセルの応答を測定し、前記画像の第3のエッジ部及び前記画像の第4のエッジ部を検出するステップと、
前記画像の前記第1、第2、第3及び第4のエッジ部によって境界される領域を、前記イメージセンサのアクティブ領域として記録するステップと、
それ以降の画像露出に対する前記イメージセンサの前記アクティブ領域内の前記ピクセルの前記応答のみを処理しかつ記憶または送信するステップとを含むことを特徴とする方法。 - 前記記録されたアクティブ領域が、矩形領域の2つの頂点によって特定されることを特徴とする請求項93の方法。
- 前記それ以降の画像露出の前記中心を前記アクティブ領域の前記中心にマッピングするステップをさらに含むことを特徴とする請求項93の方法。
- 前記マッピングが、前記センサアレイの前記中心を前記アクティブ領域の前記中心に合わせる変位を表す変位ベクトルを用いて達成されることを特徴とする請求項95の方法。
- 前記アクティブ領域の期待サイズと前記アクティブ領域の実際のサイズとの比を表すスケーリングファクタによって、それ以降の画像露出をスケーリングするステップをさらに含むことを特徴とする請求項93の方法。
- カメラの光学素子における歪みを補正する方法であって、
前記カメラを用いて複数のエッジ部を含む既知のパターンの画像を撮影するステップと、
前記既知のパターンの前記エッジ部を識別しかつ前記画像において対応するエッジ部を検出することによって、前記既知のパターンに関連して前記画像上の所定の位置で歪みを判定するステップと、
前記カメラを用いて或る対象の画像を撮影するステップと、
前記所定の位置での前記判定された歪みを用いて、前記対象の前記画像から前記判定された歪みを元に戻すステップとを含むことを特徴とする方法。 - 前記対象の前記画像が撮影された後に該画像をディスプレイ付きのワークステーションに送信するステップと、
前記ワークステーション上で前記判定された歪みを元に戻すことによって前記対象の前記画像を補正し、前記対象の前記補正された画像を前記ディスプレイ上に表示するステップとをさらに含むことを特徴とする請求項98の方法。 - 或る画像の境界を前記画像の周波数ドメイン情報に基づき決定する方法であって、
(a)Mがnで割り切れる数であるようなMピクセル×M+nピクセルの画像領域を選択し、複数のn×nブロックに分割するステップと、
(b)前記ブロックの各ブロックに対して離散コサイン変換を計算するステップと、
(c)前記M+nピクセルの方向に沿って、n2DCT値が前ブロックに比べて増加しているような前記n×nブロックのうちの1つを識別するステップと、
(d)前記識別されたブロックから始まる前記画像の前記n×nブロックを、前記識別されたブロック内に前記前ブロックの最後の列を含めることによって再編成するステップと、
(e)ステップ(b)、(c)、(d)を、最大DCT値を有するブロックが見つかるまで繰り返すステップとを含むことを特徴とする方法。 - 飲み込めるカプセル内に収容されている光学素子及びイメージセンサを有するカメラの特性を調整する方法であって、
制御された状況下で前記カメラの前記光学素子の視野を照射するステップと、
前記制御された状況下で、前記飲み込めるカプセルに設けられた透明窓から複数の画像を前記カメラの前記イメージセンサ上へ露出するステップと、
前記複数の画像から、前記カメラで撮影された画像のモデルのパラメータ値を抽出するステップと、
前記パラメータ値を用いて、前記カメラでそれ以降に撮影される画像を補正するステップとを含むことを特徴とする方法。
Applications Claiming Priority (3)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| US11/621,486 US9007478B2 (en) | 2007-01-09 | 2007-01-09 | Methods to compensate manufacturing variations and design imperfections in a capsule camera |
| US11/926,640 US8405711B2 (en) | 2007-01-09 | 2007-10-29 | Methods to compensate manufacturing variations and design imperfections in a capsule camera |
| PCT/US2007/087184 WO2008085644A1 (en) | 2007-01-09 | 2007-12-12 | Methods to compensate manufacturing variations and design imperfections in a capsule camera |
Related Child Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2013121725A Division JP2013243679A (ja) | 2007-01-09 | 2013-06-10 | カプセルカメラにおける製造ばらつき及び設計的不完全性を補正する方法 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2010516088A true JP2010516088A (ja) | 2010-05-13 |
| JP2010516088A5 JP2010516088A5 (ja) | 2011-01-27 |
Family
ID=39593916
Family Applications (3)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2009544872A Pending JP2010516088A (ja) | 2007-01-09 | 2007-12-12 | カプセルカメラにおける製造ばらつき及び設計的不完全性を補正する方法 |
| JP2013121725A Pending JP2013243679A (ja) | 2007-01-09 | 2013-06-10 | カプセルカメラにおける製造ばらつき及び設計的不完全性を補正する方法 |
| JP2014193887A Active JP5926345B2 (ja) | 2007-01-09 | 2014-09-24 | カプセルカメラにおける製造ばらつき及び設計的不完全性を補正する方法 |
Family Applications After (2)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2013121725A Pending JP2013243679A (ja) | 2007-01-09 | 2013-06-10 | カプセルカメラにおける製造ばらつき及び設計的不完全性を補正する方法 |
| JP2014193887A Active JP5926345B2 (ja) | 2007-01-09 | 2014-09-24 | カプセルカメラにおける製造ばらつき及び設計的不完全性を補正する方法 |
Country Status (5)
| Country | Link |
|---|---|
| US (1) | US8405711B2 (ja) |
| EP (1) | EP2103108A4 (ja) |
| JP (3) | JP2010516088A (ja) |
| CN (1) | CN102638650B (ja) |
| WO (1) | WO2008085644A1 (ja) |
Cited By (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2014529389A (ja) * | 2011-07-25 | 2014-11-06 | ウニベルシダデ デ コインブラ | 1つまたは複数のチェッカーボードパターンの画像を用いた自動カメラキャリブレーションの方法および装置 |
| WO2019198431A1 (ja) * | 2018-04-12 | 2019-10-17 | 富士フイルム株式会社 | 画像読取むら補正方法、画像読取装置、画像形成装置、及び画像読取むら補正プログラム |
Families Citing this family (21)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US10499029B2 (en) | 2007-01-09 | 2019-12-03 | Capso Vision Inc | Methods to compensate manufacturing variations and design imperfections in a display device |
| US8405711B2 (en) * | 2007-01-09 | 2013-03-26 | Capso Vision, Inc. | Methods to compensate manufacturing variations and design imperfections in a capsule camera |
| US9007478B2 (en) * | 2007-01-09 | 2015-04-14 | Capso Vision, Inc. | Methods to compensate manufacturing variations and design imperfections in a capsule camera |
| JP2010227200A (ja) * | 2009-03-26 | 2010-10-14 | Rohm Co Ltd | 内視鏡 |
| WO2010021342A2 (ja) * | 2008-08-19 | 2010-02-25 | ローム株式会社 | カメラ |
| FR2941067B1 (fr) * | 2009-01-14 | 2011-10-28 | Dxo Labs | Controle de defauts optiques dans un systeme de capture d'images |
| JP5244164B2 (ja) * | 2010-10-18 | 2013-07-24 | 富士フイルム株式会社 | 内視鏡装置 |
| US10154226B2 (en) * | 2012-05-15 | 2018-12-11 | Capsovision Inc. | System and method for displaying bookmarked capsule images |
| JP6377153B2 (ja) | 2013-06-25 | 2018-08-22 | デジタルダイレクト・アイアール、インク | サイドスキャン赤外線撮像装置 |
| JP2016533864A (ja) * | 2013-10-22 | 2016-11-04 | キャプソ・ヴィジョン・インコーポレーテッド | マルチ密度相を有するカプセル装置に用いられるシステム及び方法 |
| US20160225150A1 (en) * | 2015-02-02 | 2016-08-04 | Capso Vision, Inc. | Method and Apparatus for Object Distance and Size Estimation based on Calibration Data of Lens Focus |
| US10015372B2 (en) | 2016-10-26 | 2018-07-03 | Capsovision Inc | De-ghosting of images captured using a capsule camera |
| WO2019053804A1 (ja) * | 2017-09-13 | 2019-03-21 | オリンパス株式会社 | 内視鏡装置、内視鏡装置の作動方法及びプログラム |
| JP6962858B2 (ja) * | 2018-04-27 | 2021-11-05 | ファナック株式会社 | 画像管理装置 |
| CN108761994B (zh) * | 2018-05-31 | 2020-11-20 | 歌尔光学科技有限公司 | 摄像头模组和虚拟现实设备的组装的检测方法及装置 |
| US11277544B2 (en) | 2019-08-07 | 2022-03-15 | Microsoft Technology Licensing, Llc | Camera-specific distortion correction |
| US11218632B2 (en) * | 2019-11-01 | 2022-01-04 | Qualcomm Incorporated | Retractable panoramic camera module |
| WO2021178870A1 (en) * | 2020-03-05 | 2021-09-10 | Lexmark International, Inc. | Magnetic sensor array device optimizations and hybrid magnetic camera |
| TWI749862B (zh) * | 2020-11-11 | 2021-12-11 | 國立臺北科技大學 | 變壓器預警系統 |
| US11663704B2 (en) | 2021-04-28 | 2023-05-30 | Microsoft Technology Licensing, Llc | Distortion correction via modified analytical projection |
| US12108175B2 (en) | 2021-08-11 | 2024-10-01 | American Sterilizer Company | Dynamic fixed pattern noise calibrations |
Citations (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2001238137A (ja) * | 2000-02-21 | 2001-08-31 | Fuji Photo Film Co Ltd | 撮像装置 |
| JP2004023764A (ja) * | 2002-06-20 | 2004-01-22 | Olympus Corp | 画像処理装置 |
| WO2004112593A1 (ja) * | 2003-06-24 | 2004-12-29 | Olympus Corporation | カプセル型内視鏡及びカプセル型内視鏡システム |
Family Cites Families (40)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPS5519124A (en) * | 1978-07-27 | 1980-02-09 | Olympus Optical Co | Camera system for medical treatment |
| JPH03165733A (ja) * | 1989-11-27 | 1991-07-17 | Ikegami Tsushinki Co Ltd | 電子内視鏡装置 |
| DE69131377T2 (de) * | 1990-12-28 | 1999-11-18 | Canon K.K., Tokio/Tokyo | Einrichtung zur Verarbeitung von Bildern |
| JPH05211996A (ja) * | 1992-02-03 | 1993-08-24 | Toshiba Corp | スコープ画像の均一性補正方法 |
| IL108352A (en) * | 1994-01-17 | 2000-02-29 | Given Imaging Ltd | In vivo video camera system |
| DE19818975A1 (de) * | 1997-08-12 | 1999-02-18 | Hewlett Packard Co | Verfahren zum Korrigieren des Dunkelstroms in CMOS-Bilderzeugungssensoren |
| IL122602A0 (en) * | 1997-12-15 | 1998-08-16 | Tally Eitan Zeev Pearl And Co | Energy management of a video capsule |
| US20010012062A1 (en) * | 1998-07-23 | 2001-08-09 | Eric C. Anderson | System and method for automatic analysis and categorization of images in an electronic imaging device |
| JP4388151B2 (ja) * | 1998-12-17 | 2009-12-24 | オリンパス株式会社 | カメラシステム |
| IL132944A (en) * | 1999-11-15 | 2009-05-04 | Arkady Glukhovsky | Method for running a photo collection process |
| KR20030025222A (ko) * | 2000-03-08 | 2003-03-28 | 기븐 이미징 리미티드 | 체내 촬상 장치 및 시스템 |
| US6709387B1 (en) * | 2000-05-15 | 2004-03-23 | Given Imaging Ltd. | System and method for controlling in vivo camera capture and display rate |
| WO2002007587A2 (en) * | 2000-07-14 | 2002-01-31 | Xillix Technologies Corporation | Compact fluorescent endoscopy video system |
| US7262799B2 (en) * | 2000-10-25 | 2007-08-28 | Canon Kabushiki Kaisha | Image sensing apparatus and its control method, control program, and storage medium |
| US6632175B1 (en) * | 2000-11-08 | 2003-10-14 | Hewlett-Packard Development Company, L.P. | Swallowable data recorder capsule medical device |
| JP2002158926A (ja) * | 2000-11-17 | 2002-05-31 | Minolta Co Ltd | 固体撮像装置 |
| US6939292B2 (en) * | 2001-06-20 | 2005-09-06 | Olympus Corporation | Capsule type endoscope |
| US20060184039A1 (en) * | 2001-07-26 | 2006-08-17 | Dov Avni | Apparatus and method for light control in an in-vivo imaging device |
| US9149175B2 (en) * | 2001-07-26 | 2015-10-06 | Given Imaging Ltd. | Apparatus and method for light control in an in-vivo imaging device |
| JP4643089B2 (ja) * | 2001-09-27 | 2011-03-02 | オリンパス株式会社 | カプセル型医療装置 |
| JP2003198927A (ja) * | 2001-12-21 | 2003-07-11 | Minolta Co Ltd | カメラ |
| JP4053321B2 (ja) * | 2002-03-20 | 2008-02-27 | オリンパス株式会社 | 電子カメラ |
| JP4328125B2 (ja) * | 2003-04-25 | 2009-09-09 | オリンパス株式会社 | カプセル型内視鏡装置およびカプセル型内視鏡システム |
| WO2004106857A1 (ja) * | 2003-05-29 | 2004-12-09 | Olympus Corporation | ステレオ光学モジュール及びステレオカメラ |
| JP2004350963A (ja) * | 2003-05-29 | 2004-12-16 | Olympus Corp | カプセル型医療装置 |
| JP3893121B2 (ja) * | 2003-06-09 | 2007-03-14 | オリンパス株式会社 | カプセル型内視鏡システム及びカプセル型内視鏡 |
| WO2005044094A1 (ja) * | 2003-11-11 | 2005-05-19 | Olympus Corporation | カプセル型医療装置システム、及びカプセル型医療装置 |
| JP2004153848A (ja) * | 2003-12-19 | 2004-05-27 | Mega Chips Corp | 画像入力装置の画像処理回路 |
| US7822236B2 (en) * | 2004-01-07 | 2010-10-26 | Identification International, Inc. | Low power fingerprint capture system, apparatus, and method |
| US20050215876A1 (en) * | 2004-03-25 | 2005-09-29 | Eastman Kodak Company | Method and system for automatic image adjustment for in vivo image diagnosis |
| KR100891766B1 (ko) * | 2004-12-10 | 2009-04-07 | 올림푸스 가부시키가이샤 | 의용 화상 처리 장치 |
| WO2006070669A1 (ja) * | 2004-12-27 | 2006-07-06 | Olympus Corporation | 医療画像処理装置及び医療画像処理方法 |
| US7530948B2 (en) * | 2005-02-28 | 2009-05-12 | University Of Washington | Tethered capsule endoscope for Barrett's Esophagus screening |
| US7235773B1 (en) * | 2005-04-12 | 2007-06-26 | Itt Manufacturing Enterprises, Inc. | Method and apparatus for image signal compensation of dark current, focal plane temperature, and electronics temperature |
| JP2007012948A (ja) * | 2005-07-01 | 2007-01-18 | Matsushita Electric Ind Co Ltd | 固体撮像素子の検査方法および検査装置 |
| WO2007026713A1 (ja) * | 2005-08-29 | 2007-03-08 | Olympus Corporation | 受信装置 |
| US9007478B2 (en) * | 2007-01-09 | 2015-04-14 | Capso Vision, Inc. | Methods to compensate manufacturing variations and design imperfections in a capsule camera |
| US8405711B2 (en) * | 2007-01-09 | 2013-03-26 | Capso Vision, Inc. | Methods to compensate manufacturing variations and design imperfections in a capsule camera |
| US7813538B2 (en) * | 2007-04-17 | 2010-10-12 | University Of Washington | Shadowing pipe mosaicing algorithms with application to esophageal endoscopy |
| US7995798B2 (en) * | 2007-10-15 | 2011-08-09 | Given Imaging Ltd. | Device, system and method for estimating the size of an object in a body lumen |
-
2007
- 2007-10-29 US US11/926,640 patent/US8405711B2/en active Active
- 2007-12-12 JP JP2009544872A patent/JP2010516088A/ja active Pending
- 2007-12-12 EP EP07865550.3A patent/EP2103108A4/en not_active Ceased
- 2007-12-12 WO PCT/US2007/087184 patent/WO2008085644A1/en active Application Filing
- 2007-12-12 CN CN201210082410.6A patent/CN102638650B/zh active Active
-
2013
- 2013-06-10 JP JP2013121725A patent/JP2013243679A/ja active Pending
-
2014
- 2014-09-24 JP JP2014193887A patent/JP5926345B2/ja active Active
Patent Citations (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2001238137A (ja) * | 2000-02-21 | 2001-08-31 | Fuji Photo Film Co Ltd | 撮像装置 |
| JP2004023764A (ja) * | 2002-06-20 | 2004-01-22 | Olympus Corp | 画像処理装置 |
| WO2004112593A1 (ja) * | 2003-06-24 | 2004-12-29 | Olympus Corporation | カプセル型内視鏡及びカプセル型内視鏡システム |
Cited By (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2014529389A (ja) * | 2011-07-25 | 2014-11-06 | ウニベルシダデ デ コインブラ | 1つまたは複数のチェッカーボードパターンの画像を用いた自動カメラキャリブレーションの方法および装置 |
| WO2019198431A1 (ja) * | 2018-04-12 | 2019-10-17 | 富士フイルム株式会社 | 画像読取むら補正方法、画像読取装置、画像形成装置、及び画像読取むら補正プログラム |
Also Published As
| Publication number | Publication date |
|---|---|
| EP2103108A4 (en) | 2013-09-11 |
| US20080165248A1 (en) | 2008-07-10 |
| JP2013243679A (ja) | 2013-12-05 |
| WO2008085644A1 (en) | 2008-07-17 |
| EP2103108A1 (en) | 2009-09-23 |
| CN102638650B (zh) | 2014-12-10 |
| US8405711B2 (en) | 2013-03-26 |
| JP5926345B2 (ja) | 2016-05-25 |
| CN102638650A (zh) | 2012-08-15 |
| JP2015053683A (ja) | 2015-03-19 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP5926345B2 (ja) | カプセルカメラにおける製造ばらつき及び設計的不完全性を補正する方法 | |
| US9307233B2 (en) | Methods to compensate manufacturing variations and design imperfections in a capsule camera | |
| JP5748369B2 (ja) | 生体内カメラ装置とその制御方法 | |
| KR101532395B1 (ko) | 신체 루멘 내의 대상물의 크기를 추산하기 위한 장치, 시스템 및 방법 | |
| KR20200104375A (ko) | 광 결핍 환경에서의 도구 추적을 갖는 초분광 이미징 | |
| US11187657B2 (en) | Hyperspectral imaging with fixed pattern noise cancellation | |
| US9911203B2 (en) | System and method for size estimation of in-vivo objects | |
| US11019318B2 (en) | Methods to compensate manufacturing variations and design imperfections in a display device | |
| CN110335318B (zh) | 一种基于摄像系统的消化道内物体测量方法 | |
| JP6737937B2 (ja) | 表示装置の製造上のばらつき及び設計上の欠陥を補償する方法 | |
| WO2020256929A1 (en) | Hyperspectral and fluorescence imaging and topology laser mapping with minimal area monolithic image sensor | |
| US20200400825A1 (en) | Laser mapping imaging with fixed pattern noise cancellation | |
| US20200397240A1 (en) | Laser mapping with minimal area monolithic image sensor | |
| US20160198132A1 (en) | Method and apparatus for wide-band imaging based on narrow-band image data | |
| WO2019194106A1 (ja) | 画像処理装置、画像処理方法および画像処理プログラム | |
| CN111956168A (zh) | 一种胶囊内窥镜系统和用于胶囊内窥镜的测距方法 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20101206 |
|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20101206 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20120614 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20120619 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20120918 |
|
| A02 | Decision of refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A02 Effective date: 20130212 |