JP2010093940A - 電力供給回路及び信号検出装置 - Google Patents
電力供給回路及び信号検出装置 Download PDFInfo
- Publication number
- JP2010093940A JP2010093940A JP2008261010A JP2008261010A JP2010093940A JP 2010093940 A JP2010093940 A JP 2010093940A JP 2008261010 A JP2008261010 A JP 2008261010A JP 2008261010 A JP2008261010 A JP 2008261010A JP 2010093940 A JP2010093940 A JP 2010093940A
- Authority
- JP
- Japan
- Prior art keywords
- signal
- power supply
- line
- power
- signal detector
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Granted
Links
- 238000001514 detection method Methods 0.000 title claims description 70
- 230000005355 Hall effect Effects 0.000 claims 1
- 238000010586 diagram Methods 0.000 description 9
- 230000002159 abnormal effect Effects 0.000 description 7
- 230000005856 abnormality Effects 0.000 description 4
- 238000006243 chemical reaction Methods 0.000 description 2
Images

Classifications
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B62—LAND VEHICLES FOR TRAVELLING OTHERWISE THAN ON RAILS
- B62D—MOTOR VEHICLES; TRAILERS
- B62D6/00—Arrangements for automatically controlling steering depending on driving conditions sensed and responded to, e.g. control circuits
- B62D6/08—Arrangements for automatically controlling steering depending on driving conditions sensed and responded to, e.g. control circuits responsive only to driver input torque
- B62D6/10—Arrangements for automatically controlling steering depending on driving conditions sensed and responded to, e.g. control circuits responsive only to driver input torque characterised by means for sensing or determining torque
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B62—LAND VEHICLES FOR TRAVELLING OTHERWISE THAN ON RAILS
- B62D—MOTOR VEHICLES; TRAILERS
- B62D5/00—Power-assisted or power-driven steering
- B62D5/04—Power-assisted or power-driven steering electrical, e.g. using an electric servo-motor connected to, or forming part of, the steering gear
- B62D5/0457—Power-assisted or power-driven steering electrical, e.g. using an electric servo-motor connected to, or forming part of, the steering gear characterised by control features of the drive means as such
- B62D5/0481—Power-assisted or power-driven steering electrical, e.g. using an electric servo-motor connected to, or forming part of, the steering gear characterised by control features of the drive means as such monitoring the steering system, e.g. failures
- B62D5/0484—Power-assisted or power-driven steering electrical, e.g. using an electric servo-motor connected to, or forming part of, the steering gear characterised by control features of the drive means as such monitoring the steering system, e.g. failures for reaction to failures, e.g. limp home
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B62—LAND VEHICLES FOR TRAVELLING OTHERWISE THAN ON RAILS
- B62D—MOTOR VEHICLES; TRAILERS
- B62D5/00—Power-assisted or power-driven steering
- B62D5/04—Power-assisted or power-driven steering electrical, e.g. using an electric servo-motor connected to, or forming part of, the steering gear
- B62D5/0457—Power-assisted or power-driven steering electrical, e.g. using an electric servo-motor connected to, or forming part of, the steering gear characterised by control features of the drive means as such
- B62D5/0481—Power-assisted or power-driven steering electrical, e.g. using an electric servo-motor connected to, or forming part of, the steering gear characterised by control features of the drive means as such monitoring the steering system, e.g. failures
- B62D5/049—Power-assisted or power-driven steering electrical, e.g. using an electric servo-motor connected to, or forming part of, the steering gear characterised by control features of the drive means as such monitoring the steering system, e.g. failures detecting sensor failures
Landscapes
- Engineering & Computer Science (AREA)
- Chemical & Material Sciences (AREA)
- Combustion & Propulsion (AREA)
- Transportation (AREA)
- Mechanical Engineering (AREA)
- Testing Of Short-Circuits, Discontinuities, Leakage, Or Incorrect Line Connections (AREA)
- Power Steering Mechanism (AREA)
- Direct Current Feeding And Distribution (AREA)
- Control Of Voltage And Current In General (AREA)
Abstract
電源ラインを複数系統にした電力供給回路や信号検出装置において、1系統に生じた地絡が他の系統に及ぶことを防ぐことができる電力供給回路及び信号検出装置を提供する。
【解決手段】
第1電源ラインPL1は、電源回路13とホールIC1とを接続し、第2電源ラインPL2は、電源回路13とホールIC2を接続する。電源ライン接続部42は、第1電源ラインPL1と第2電源ラインPL2とを接続する。電源ライン接続部42を介することで、第1電源ラインPL1と第2電源ラインPL2のうちいずれか一方の電源ラインが断線した場合でもホールIC1及びホールIC2が他方の電源ラインから電力供給を受ける。整流素子41は、第1電源ラインPL1と第2電源ラインPL2それぞれに設けられ、電源ライン接続部42と電源回路13との間に電源回路13からホールICに流れる電流のみ通電して逆方向に流れる電流を遮断する。
【選択図】図1
Description
(全体構成)
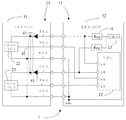
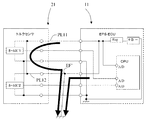
図1に実施例1に係る信号検出装置1のシステム構成図を示す。信号検出装置1は、主にトルクセンサ21と、EPS−ECU11とからなる。トルクセンサ21はステアリング(図示せず)の操舵トルクを検出し、EPS−ECU11は、操舵トルクに基づいて、ステアリングの操舵力をアシストするべくモータを制御する。
トルクセンサ21は、車両のステアリングに作用する操舵トルクを検出し、その検出した操舵トルクに対応するトルク信号を第1信号ラインSL1及び第2信号ラインSL2を介してEPS−ECU11側に送信する。トルクセンサ21は、第1筐体31内部に第1負荷(第1信号検出器22)であるホールIC1と第2負荷(第2信号検出器23)であるホールIC2とを有する。
EPS−ECU11は、第2筐体32内部に電源である電源回路13と、レギュレータ14と、信号検出回路であるCPU12とを有する。電源回路13は、車両のボディに接地(ボディアース)されるものであり、電源ラインを介して、トルクセンサ21に電力を供給する。レギュレータ14は、電源回路13から出力する電圧・電流を一定に保つために用いられる。CPU12は、トルクセンサ21側から送信されたトルク信号を受け取り、モータの制御に必要な演算を行う。
第1電源ラインPL1は、電源回路13とホールIC1とを接続し、第2電源ラインPL2は、電源回路13とホールIC2を接続する。電源ライン接続部42は、第1電源ラインPL1と第2電源ラインPL2とを接続する。電源ライン接続部42を介することで、第1電源ラインPL1と第2電源ラインPL2のうちいずれか一方の電源ラインが断線した場合でもホールIC1及びホールIC2が他方の電源ラインから電力供給を受けることができる。
整流素子41は、第1電源ラインPL1と第2電源ラインPL2それぞれに設けられ、電源ライン接続部42と電源回路13との間に電源回路13からホールICに流れる電流のみ通電して逆方向に流れる電流を遮断する。
レギュレータ14は、第1電源ラインPL1と第2電源ラインPL2それぞれにおいて、整流素子41と電源回路13との間に設けられ、入力電力を所定の出力電力に変換する。レギュレータ14を第1電源ラインPL1及び第2電源ラインPL2それぞれに設けているため、第1電源ラインPL1又は第2電源ラインPL2の一方の電源ラインが地絡して短絡電流が流れて、地絡した電源ラインのレギュレータ14が破壊されたとしても、他方の電源ラインはそのままレギュレータ14を用いることができる。
ホールIC1は、所定の対象を検出して第1信号を出力する第1信号検出器22(第1負荷)であり、ホールIC2は、所定の対象を検出して第2信号を出力する第2信号検出器23(第2負荷)である。ホールIC1とホールIC2は電源回路13と並列接続される。ここで、所定の対象とはモータのことであり、第1信号と第2信号は、モータのトルク信号に該当する。
第1信号ラインSL1は、信号検出回路とホールIC1を接続して第1信号を伝達し、第2信号ラインSL2は、信号検出回路とホールIC2を接続して第2信号を伝達する。
信号検出回路は、第1信号ラインSL1及び第2信号ラインSL2を介して第1信号と第2信号を検出する。
第1グランドラインGL1は、ホールIC1及びホールIC2をそれぞれ並列に接続し、第2グランドラインGL2もホールIC1及びホールIC2をそれぞれ並列に接続する。
ホールIC1及びホールIC2と電源ライン接続部42と整流素子41とは第1筐体31に収容され、電源回路13と信号検出回路とは第2筐体32に収容される。
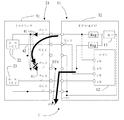
図2を用いて、実施例1に係る信号検出装置1の電源ラインPL2において地絡が生じた際の動作を説明する。EF1点において地絡が生じることで、EF1点の電位が降下し、電源ラインPL2の電流はEF1点を介して大地に電流が流れ込み、電源ラインPL2を介してホールIC1及びホールIC2に電力を供給することができなくなる。一方、電流ラインPL1を流れる電流は、電流ラインPL2上に整流素子41があるため、電源ラインPL1から電源ライン接続部42を介してEF1点へは短絡電流は流れ込まない。したがって、電源ラインPL1を介して、ホールIC1及びホールIC2に電力供給を行うことができる。
(全体構成)
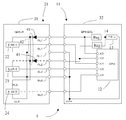
図3に実施例2に係る信号検出装置1のシステム構成図を示す。信号検出装置1は、主にトルクセンサ21と、EPS−ECU11とからなる。トルクセンサ21はステアリングの操舵トルクを検出し、EPS−ECU11は、操舵トルクに基づいて、ステアリングの操舵力をアシストするべくモータを制御する。
トルクセンサ21は、車両のステアリングに作用する操舵トルクを検出し、その検出した操舵トルクに対応するトルク信号を第1信号ラインSL1、第2信号ラインSL2及び第3信号ラインSL3を介してEPS−ECU11側に送信する。トルクセンサ21は、第1筐体31内部に第1信号検出器22であるホールIC1、第2信号検出器23であるホールIC2及び第3信号検出器24であるホールIC3とを有する。
EPS−ECU11は、第2筐体32内部に電源である電源回路13と、レギュレータ14と、信号検出回路であるCPU12とを有する。電源回路13は、車両のボディに接地(ボディアース)されるものであり、電源ラインを介して、トルクセンサ21に電力を供給する。レギュレータ14は、電源回路13から出力する電圧・電流を一定に保つために用いられる。CPU12は、トルクセンサ21側から送信されたトルク信号を受け取り、モータの制御に必要な演算を行う。
第1電源ラインPL1は、電源回路13とホールIC1とを接続し、第2電源ラインPL2は、電源回路13とホールIC2を接続し、第3電源ラインPL3は、第1電源ラインPL1とホールIC3又は第2電源ラインPL2とホールIC3を接続する。電源ライン接続部42は、第1電源ラインPL1と第2電源ラインPL2とを接続する。電源ライン接続部42を介することで、第1電源ラインPL1と第2電源ラインPL2のうちいずれか一方の電源ラインが断線した場合でもホールIC1及びホールIC2が他方の電源ラインから電力供給を受けることができる。さらに、第3電源ラインPL3は、整流素子41と第1信号検出器の間又は整流素子41と第2信号検出器との間において、第1電源ラインPL1又は第2電源ラインPL2と接続される。
整流素子41は、第1電源ラインPL1と第2電源ラインPL2それぞれに設けられ、電源ライン接続部42と電源回路13との間に電源回路13から信号検出器に流れる電流のみ通電して逆方向に流れる電流を遮断する。
レギュレータ14は、第1電源ラインPL1と第2電源ラインPL2それぞれにおいて、整流素子41と電源回路13との間に設けられ、入力電力を所定の出力電力に変換する。レギュレータ14を第1電源ラインPL1及び第2電源ラインPL2それぞれに設けているため、第1電源ラインPL1又は第2電源ラインPL2の一方の電源ラインが地絡して短絡電流が流れて、地絡した電源ラインのレギュレータ14が破壊されたとしても、他方の電源ラインはそのままレギュレータ14を用いることができる。
ホールIC1は、所定の対象を検出して第1信号を出力する第1信号検出器22であり、ホールIC2は、所定の対象を検出して第2信号を出力する第2信号検出器23であり、ホールIC3は、所定の対象を検出して第3信号を出力する第3信号検出器24である。ここで、所定の対象とはモータのことであり、第1信号と第2信号は、モータのトルク信号に該当する。
第1信号ラインSL1は、信号検出回路とホールIC1を接続して第1信号を伝達し、第2信号ラインSL2は、信号検出回路とホールIC2を接続して第2信号を伝達し、第3信号ラインSL3は信号検出回路とホールIC3を接続して第3信号を伝達する。
信号検出回路は、第1信号ラインSL1、第2信号ラインSL2及び第3信号ラインSL3を介して第1信号と第2信号を検出する。
第1グランドラインGL1は、ホールIC1、ホールIC2及びホールIC3をそれぞれ並列に接続し、第2グランドラインGL2は、ホールIC1、ホールIC2及びホールIC3をそれぞれ並列に接続する。
ホールIC1、ホールIC2及びホールIC3と電源ライン接続部42と整流素子41とは第1筐体31に収容され、電源回路13と信号検出回路とは第2筐体32に収容される。
(地絡時)
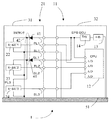
図4を用いて、実施例2に係る信号検出装置1の電源ラインPL2において地絡が生じた際の動作を説明する。EF2点において地絡が生じることで、EF2点の電位が降下し、電源ラインPL2の電流はEF2点を介して大地に電流が流れ込み、電源ラインPL2を介してホールIC1、ホールIC2及びホールIC3に電力を供給することができなくなる。一方、電流ラインPL1を流れる電流は、電流ラインPL2上に整流素子41があるため、電源ラインPL1から電源ライン接続部42を介してEF2点へは短絡電流は流れ込まない。したがって、電源ラインPL1を介して、ホールIC1、ホールIC2及びホールIC3に電力供給を行うことができる。
図4を用いて、実施例2に係る信号検出装置1の信号ラインSL3において断線が生じた場合の信号検出回路の処理について説明する。図4は、信号ラインSL3に断線が生じた場合を示している。この場合、ホールIC3が信号ラインSL3を介して送信した第3信号はCPU12に届かず、CPU12において受信される第3信号は、第1信号及び第2信号と異なるトルクを示す信号となる。CPU12は、第1信号と第2信号、第2信号と第3信号、第3信号と第1信号というそれぞれ3つの組み合わせについて、各信号の異同を判定する。この場合、CPU12は、第1信号と第2信号の組み合わせでは互いの信号は同一、第2信号と第3信号、第3信号と第1信号の組み合わせでは互いの信号は異なるという結果を得る。これらの結果から、CPU12は、第1信号と第2信号は互いに同一のトルクを示す信号であるという判定結果から第1信号と第2信号は正常な信号と判定し、さらに、第2信号と第3信号、第3信号と第1信号は互いに異なるトルクを示す信号という判定結果から第3信号は異常信号と判定する。
図5に実施例3に係る信号検出装置1のシステム構成図を示す。ここでは、実施例2における信号検出装置1との相違点についてのみ説明し、共通点の説明については省略する。
11 EPS−ECU
12 CPU(信号検出回路)
13 電源回路(電源)
14 レギュレータ
21 トルクセンサ
22 第1信号検出器(ホールIC1、第1負荷)
23 第2信号検出器(ホールIC2、第2負荷)
24 第3信号検出器(ホールIC3)
31 第1筐体
32 第2筐体
41 整流素子
42 電源ライン接続部
51 ボディ
PL1 第1電源ライン
PL2 第2電源ライン
PL3 第3電源ライン
SL1 第1信号ライン
SL2 第2信号ライン
SL3 第3信号ライン
GL1 第1グランドライン
GL2 第2グランドライン
Claims (10)
- 電源と、前記電源に並列接続された第1負荷及び第2負荷と、前記電源と前記第1負荷を接続する第1電源ラインと、前記電源と前記第2負荷を接続する第2電源ラインと、前記第1電源ラインと前記第2電源ラインのうちいずれか一方の電源ラインが断線した場合でも前記第1負荷及び前記第2負荷が他方の電源ラインから電力供給を受けることができるように前記第1電源ラインと前記第2電源ラインを接続した電源ライン接続部と、を有し、前記第1電源ライン及び前記第2電源ラインは、それぞれ前記電源ライン接続部と前記電源との間に前記電源から前記負荷に流れる電流のみ通電して逆方向に流れる電流を遮断する整流素子を設けたことを特徴とする電力供給回路。
- 前記第1電源ライン及び前記第2電源ラインは、
それぞれ前記整流素子と前記電源との間に
入力電力を所定の出力電力に変換するレギュレータを有する
ことを特徴とする請求項1記載の電力供給回路。 - 所定の対象を検出して第1信号を出力する第1信号検出器と、
前記所定の対象を検出して第2信号を出力する第2信号検出器と、
前記第1信号検出器と前記第2信号検出器とに並列接続される電源と、
前記電源と前記第1信号検出器を接続する第1電源ラインと、
前記電源と前記第2信号検出器を接続する第2電源ラインと、
前記第1信号を伝達する第1信号ラインと、
前記第2信号を伝達する第2信号ラインと、
前記第1信号ライン及び前記第2信号ラインを介して前記第1信号と前記第2信号とを検出する信号検出回路と、
前記第1電源ラインと前記第2電源ラインのうちいずれか一方の電源ラインが断線した場合でも前記第1信号検出器及び前記第2信号検出器が他方の電源ラインから電力供給を受けることができるように前記第1電源ラインと前記第2電源ラインを接続した電源ライン接続部と、
を有し、
前記第1電源ライン及び前記第2電源ラインは、それぞれ前記電源ライン接続部と前記電源との間に前記電源から前記信号検出器に流れる電流のみ通電して逆方向に流れる電流を遮断する整流素子を設けることを特徴とする信号検出装置。 - 前記第1電源ライン及び前記第2電源ラインは、
それぞれ前記整流素子と前記電源との間に
入力電力を所定の出力電力に変換するレギュレータを有する
ことを特徴とする請求項3記載の信号検出装置。 - 前記第1信号と前記第2信号とは、互いに位相反転の関係にあることを特徴とする請求項3又は4に記載の信号検出装置。
- 所定の対象を検出して第1信号を出力する第1信号検出器と、
前記所定の対象を検出して第2信号を出力する第2信号検出器と、
前記所定の対象を検出して第3信号を出力する第3信号検出器と、
前記第1信号検出器と前記第2信号検出器と前記第3信号検出器とに並列接続される電源と、
前記電源と前記第1信号検出器を接続する第1電源ラインと、
前記電源と前記第2信号検出器を接続する第2電源ラインと、
前記第1電源ライン及び前記第2電源ラインと前記第3信号検出器を接続する第3電源ラインと、
前記第1信号を伝達する第1信号ラインと、
前記第2信号を伝達する第2信号ラインと、
前記第3信号を伝達する第3信号ラインと、
前記第1信号ライン、前記第2信号ライン及び前記第3信号ラインを介して
前記第1信号、前記第2信号及び前記第3信号を検出する信号検出回路と、
前記第1電源ラインと前記第2電源ラインのうちいずれか一方の電源ラインが断線した場合でも
前記第1信号検出器及び前記第2信号検出器が他方の電源ラインから電力供給を受けることができるように
前記第1電源ラインと前記第2電源ラインを接続した電源ライン接続部と、
を有し、
前記第1電源ライン及び前記第2電源ラインは、それぞれ前記電源ライン接続部と前記電源との間に前記電源から前記信号検出器に流れる電流のみ通電して逆方向に流れる電流を遮断する整流素子を設け、
前記第3電源ラインは、前記整流素子と前記第1負荷の間又は前記整流素子と前記第2負荷との間において、前記第1電源ライン及び前記第2電源ラインと接続されることを特徴とする信号検出装置。 - 前記第1信号検出器、前記第2信号検出器及び前記第3信号検出器をそれぞれ並列に接続する第1グランドラインと、
前記第1信号検出器、前記第2信号検出器及び前記第3信号検出器をそれぞれ並列に接続する第2グランドラインと、
を有し、
前記第1信号検出器、前記第2信号検出器及び前記第3信号検出器は、
前記第1グランドライン又は前記第2グランドラインの一方のグランドラインが断線しても他方のグランドラインにより接地されることを特徴とする請求項6記載の信号検出装置。 - 前記第1信号検出器と前記第2信号検出器と前記第3信号検出器と前記電源ライン接続部と前記整流素子とを収容する第1筐体と、前記電源と前記信号検出回路を収容する第2筐体と、を有することを特徴とする請求項6又は7記載の信号検出装置。
- 請求項6ないし8のいずれか1項記載の信号検出装置は、操舵トルクに基づいて車両のステアリングの操舵力を補助する電動パワーステアリング装置に用いられる信号検出装置であって、
前記第1信号検出器、前記第2信号検出器及び前記第3信号検出器はそれぞれ前記ステアリングに作用する操舵トルクを検出するホールICであることを特徴とする請求項6ないし8のいずれか1項記載の信号検出装置。 - 前記電源は前記車両のボディに接地されるものであって、前記第1信号検出器、前記第2信号検出器及び前記第3信号検出器は、前記第1グランドライン又は前記第2グランドラインに代えて、前記車両のボディに接地されることを特徴とする請求項9の信号検出装置。
Priority Applications (3)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2008261010A JP4666045B2 (ja) | 2008-10-07 | 2008-10-07 | 信号検出装置 |
| DE200910044178 DE102009044178A1 (de) | 2008-10-07 | 2009-10-05 | Leistungsversorgungsschaltkreis und Signaldetektionsgerät |
| US12/574,243 US8053936B2 (en) | 2008-10-07 | 2009-10-06 | Power supply circuit and signal detection apparatus |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2008261010A JP4666045B2 (ja) | 2008-10-07 | 2008-10-07 | 信号検出装置 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2010093940A true JP2010093940A (ja) | 2010-04-22 |
| JP4666045B2 JP4666045B2 (ja) | 2011-04-06 |
Family
ID=42063205
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2008261010A Expired - Fee Related JP4666045B2 (ja) | 2008-10-07 | 2008-10-07 | 信号検出装置 |
Country Status (3)
| Country | Link |
|---|---|
| US (1) | US8053936B2 (ja) |
| JP (1) | JP4666045B2 (ja) |
| DE (1) | DE102009044178A1 (ja) |
Cited By (8)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2013257230A (ja) * | 2012-06-13 | 2013-12-26 | Jtekt Corp | 回転角センサ及び回転角センサの異常検出装置 |
| KR20150027911A (ko) * | 2013-09-04 | 2015-03-13 | 현대모비스 주식회사 | 전동식 조향장치의 센서전원인터페이스 및 그 제어방법 |
| JP2016128308A (ja) * | 2015-01-09 | 2016-07-14 | トヨタ自動車株式会社 | 電源装置 |
| JP2017165314A (ja) * | 2016-03-17 | 2017-09-21 | 株式会社デンソー | センサ装置、および、これを用いた電動パワーステアリング装置 |
| JP2018043578A (ja) * | 2016-09-13 | 2018-03-22 | 日立オートモティブシステムズ株式会社 | センサ装置 |
| WO2021070824A1 (ja) * | 2019-10-10 | 2021-04-15 | 株式会社デンソー | 回転電機システム |
| JP2022183822A (ja) * | 2021-05-31 | 2022-12-13 | 日立Astemo株式会社 | 駆動制御装置 |
| WO2025198333A1 (ko) * | 2024-03-22 | 2025-09-25 | 엘지이노텍 주식회사 | 모터 제어기 |
Families Citing this family (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| DE102015114630B4 (de) * | 2015-09-02 | 2024-09-05 | Robert Bosch Gmbh | Sensorvorrichtung, lenksystem |
| JP2017081387A (ja) * | 2015-10-27 | 2017-05-18 | Kyb株式会社 | センサ装置及び電動パワーステアリング装置 |
| DE102019134505A1 (de) * | 2019-12-16 | 2021-06-17 | Knorr-Bremse Systeme für Nutzfahrzeuge GmbH | Messsystem zur Erfassung eines physikalischen Parameters und Verfahren zum Betreiben eines Messsystems |
| DE102021114097A1 (de) * | 2021-06-01 | 2022-12-01 | Knorr-Bremse Systeme für Nutzfahrzeuge GmbH | Messsystem zur Erfassung eines physikalischen Parameters und Verfahren zum Betreiben eines Messystems |
Citations (9)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPS5473931U (ja) * | 1977-11-05 | 1979-05-25 | ||
| JPS54105743A (en) * | 1978-01-30 | 1979-08-20 | Nec Corp | Power supply system |
| JPH03249529A (ja) * | 1990-02-28 | 1991-11-07 | Atsugi Unisia Corp | トルクセンサ |
| JPH05112189A (ja) * | 1991-10-21 | 1993-05-07 | Sumitomo Wiring Syst Ltd | 電装品のアース装置 |
| JPH10108363A (ja) * | 1996-09-25 | 1998-04-24 | Sony Corp | 並列運用電源システム |
| JP2003137111A (ja) * | 2001-11-06 | 2003-05-14 | Koyo Seiko Co Ltd | 電動パワーステアリング装置 |
| JP2004163303A (ja) * | 2002-11-14 | 2004-06-10 | Denso Corp | トルクセンサ |
| JP2007295658A (ja) * | 2006-04-21 | 2007-11-08 | Nsk Ltd | モータ制御装置及びこれを用いた電動パワーステアリング制御装置 |
| JP2008302825A (ja) * | 2007-06-08 | 2008-12-18 | Honda Motor Co Ltd | 車両用電源装置 |
Family Cites Families (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| DE2750456B1 (de) | 1977-11-11 | 1979-05-03 | Dornier System Gmbh | Spinnrotor fuer OE-Rotorspinnmaschine |
| DE19527876A1 (de) | 1995-07-29 | 1997-01-30 | Poly Clip System Gmbh & Co Kg | Verschlußklammer |
| DE10362129B8 (de) | 2002-11-14 | 2013-08-08 | Denso Corporation | Hochzuverlässiger Drehmomentsensor |
| US7265458B2 (en) * | 2005-04-08 | 2007-09-04 | Eaton Power Quality Corporation | Apparatus and methods for coordinated static switch operations for load transfers in uninterruptible power supply systems |
-
2008
- 2008-10-07 JP JP2008261010A patent/JP4666045B2/ja not_active Expired - Fee Related
-
2009
- 2009-10-05 DE DE200910044178 patent/DE102009044178A1/de not_active Withdrawn
- 2009-10-06 US US12/574,243 patent/US8053936B2/en not_active Expired - Fee Related
Patent Citations (9)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPS5473931U (ja) * | 1977-11-05 | 1979-05-25 | ||
| JPS54105743A (en) * | 1978-01-30 | 1979-08-20 | Nec Corp | Power supply system |
| JPH03249529A (ja) * | 1990-02-28 | 1991-11-07 | Atsugi Unisia Corp | トルクセンサ |
| JPH05112189A (ja) * | 1991-10-21 | 1993-05-07 | Sumitomo Wiring Syst Ltd | 電装品のアース装置 |
| JPH10108363A (ja) * | 1996-09-25 | 1998-04-24 | Sony Corp | 並列運用電源システム |
| JP2003137111A (ja) * | 2001-11-06 | 2003-05-14 | Koyo Seiko Co Ltd | 電動パワーステアリング装置 |
| JP2004163303A (ja) * | 2002-11-14 | 2004-06-10 | Denso Corp | トルクセンサ |
| JP2007295658A (ja) * | 2006-04-21 | 2007-11-08 | Nsk Ltd | モータ制御装置及びこれを用いた電動パワーステアリング制御装置 |
| JP2008302825A (ja) * | 2007-06-08 | 2008-12-18 | Honda Motor Co Ltd | 車両用電源装置 |
Cited By (12)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2013257230A (ja) * | 2012-06-13 | 2013-12-26 | Jtekt Corp | 回転角センサ及び回転角センサの異常検出装置 |
| KR20150027911A (ko) * | 2013-09-04 | 2015-03-13 | 현대모비스 주식회사 | 전동식 조향장치의 센서전원인터페이스 및 그 제어방법 |
| KR102071405B1 (ko) * | 2013-09-04 | 2020-03-03 | 현대모비스 주식회사 | 전동식 조향장치의 센서전원인터페이스 및 그 제어방법 |
| JP2016128308A (ja) * | 2015-01-09 | 2016-07-14 | トヨタ自動車株式会社 | 電源装置 |
| JP2017165314A (ja) * | 2016-03-17 | 2017-09-21 | 株式会社デンソー | センサ装置、および、これを用いた電動パワーステアリング装置 |
| JP2018043578A (ja) * | 2016-09-13 | 2018-03-22 | 日立オートモティブシステムズ株式会社 | センサ装置 |
| WO2021070824A1 (ja) * | 2019-10-10 | 2021-04-15 | 株式会社デンソー | 回転電機システム |
| JP2021064996A (ja) * | 2019-10-10 | 2021-04-22 | 株式会社デンソー | 回転電機システム |
| JP7298433B2 (ja) | 2019-10-10 | 2023-06-27 | 株式会社デンソー | 回転電機システム |
| JP2022183822A (ja) * | 2021-05-31 | 2022-12-13 | 日立Astemo株式会社 | 駆動制御装置 |
| JP7675481B2 (ja) | 2021-05-31 | 2025-05-14 | Astemo株式会社 | 駆動制御装置 |
| WO2025198333A1 (ko) * | 2024-03-22 | 2025-09-25 | 엘지이노텍 주식회사 | 모터 제어기 |
Also Published As
| Publication number | Publication date |
|---|---|
| DE102009044178A1 (de) | 2010-05-06 |
| US8053936B2 (en) | 2011-11-08 |
| US20100084216A1 (en) | 2010-04-08 |
| JP4666045B2 (ja) | 2011-04-06 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP4666045B2 (ja) | 信号検出装置 | |
| CN103660999B (zh) | 两轮倒立摆车辆及其控制方法 | |
| US9182452B2 (en) | Power supply voltage monitoring circuit, sensor circuit for vehicle, and power steering apparatus | |
| US20120152647A1 (en) | Torque sensor, torque detector, and electric power steering device | |
| JP2013079027A (ja) | 電動パワーステアリング装置 | |
| JP5924510B2 (ja) | 冗長化演算処理システム | |
| US10392049B2 (en) | Power steering device and control device for on-board device | |
| KR20130029195A (ko) | 차량용 구동모터의 레졸버 고장감지시스템 | |
| US11084524B2 (en) | Motor control device | |
| US9932067B2 (en) | Electric power steering apparatus | |
| JP5961566B2 (ja) | トルクセンサの異常診断装置及び異常診断方法 | |
| CN108349525A (zh) | 传感器装置和电动动力转向装置 | |
| KR101148289B1 (ko) | 차속 및 엔진속 신호의 단락 감지 기능을 제공하는전자제어장치 | |
| US10060983B2 (en) | Method and apparatus for determining a physical quantity of a multiphase synchronous machine | |
| JP2018043578A (ja) | センサ装置 | |
| EP3460993B1 (en) | Electronic control device having multiple system circuits | |
| KR20150065986A (ko) | 모터 위치 센서의 고장 여부를 검출하는 전자 제어 유닛 | |
| JP4746461B2 (ja) | 回転角度検出装置 | |
| WO2021117636A1 (ja) | 電動モータの駆動制御装置 | |
| JP4779380B2 (ja) | ブラシレスモータ及びこれを使用した電動パワーステアリング装置 | |
| JP2014076722A (ja) | モータ制御装置 | |
| KR20140110424A (ko) | 토크 센서의 고장을 검출하는 장치 및 방법 | |
| KR102494675B1 (ko) | 전동식 동력 조향 시스템의 페일 세이프 장치 및 방법 | |
| JP2009120076A (ja) | 電子制御装置、及び車両制御システム | |
| KR101195725B1 (ko) | 모터 제어용 전자제어장치 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20100215 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20100716 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20100727 |
|
| RD01 | Notification of change of attorney |
Free format text: JAPANESE INTERMEDIATE CODE: A7421 Effective date: 20100802 |
|
| A521 | Written amendment |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20100921 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20101214 |
|
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20101227 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20140121 Year of fee payment: 3 |
|
| R151 | Written notification of patent or utility model registration |
Ref document number: 4666045 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R151 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20140121 Year of fee payment: 3 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| LAPS | Cancellation because of no payment of annual fees |