JP2010081663A - 回転電機制御システム - Google Patents
回転電機制御システム Download PDFInfo
- Publication number
- JP2010081663A JP2010081663A JP2008243738A JP2008243738A JP2010081663A JP 2010081663 A JP2010081663 A JP 2010081663A JP 2008243738 A JP2008243738 A JP 2008243738A JP 2008243738 A JP2008243738 A JP 2008243738A JP 2010081663 A JP2010081663 A JP 2010081663A
- Authority
- JP
- Japan
- Prior art keywords
- current
- current command
- rotating electrical
- characteristic line
- electrical machine
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Granted
Links
Images







Classifications
-
- H—ELECTRICITY
- H02—GENERATION; CONVERSION OR DISTRIBUTION OF ELECTRIC POWER
- H02P—CONTROL OR REGULATION OF ELECTRIC MOTORS, ELECTRIC GENERATORS OR DYNAMO-ELECTRIC CONVERTERS; CONTROLLING TRANSFORMERS, REACTORS OR CHOKE COILS
- H02P21/00—Arrangements or methods for the control of electric machines by vector control, e.g. by control of field orientation
- H02P21/0003—Control strategies in general, e.g. linear type, e.g. P, PI, PID, using robust control
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60L—PROPULSION OF ELECTRICALLY-PROPELLED VEHICLES; SUPPLYING ELECTRIC POWER FOR AUXILIARY EQUIPMENT OF ELECTRICALLY-PROPELLED VEHICLES; ELECTRODYNAMIC BRAKE SYSTEMS FOR VEHICLES IN GENERAL; MAGNETIC SUSPENSION OR LEVITATION FOR VEHICLES; MONITORING OPERATING VARIABLES OF ELECTRICALLY-PROPELLED VEHICLES; ELECTRIC SAFETY DEVICES FOR ELECTRICALLY-PROPELLED VEHICLES
- B60L15/00—Methods, circuits, or devices for controlling the traction-motor speed of electrically-propelled vehicles
- B60L15/02—Methods, circuits, or devices for controlling the traction-motor speed of electrically-propelled vehicles characterised by the form of the current used in the control circuit
- B60L15/025—Methods, circuits, or devices for controlling the traction-motor speed of electrically-propelled vehicles characterised by the form of the current used in the control circuit using field orientation; Vector control; Direct Torque Control [DTC]
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60L—PROPULSION OF ELECTRICALLY-PROPELLED VEHICLES; SUPPLYING ELECTRIC POWER FOR AUXILIARY EQUIPMENT OF ELECTRICALLY-PROPELLED VEHICLES; ELECTRODYNAMIC BRAKE SYSTEMS FOR VEHICLES IN GENERAL; MAGNETIC SUSPENSION OR LEVITATION FOR VEHICLES; MONITORING OPERATING VARIABLES OF ELECTRICALLY-PROPELLED VEHICLES; ELECTRIC SAFETY DEVICES FOR ELECTRICALLY-PROPELLED VEHICLES
- B60L50/00—Electric propulsion with power supplied within the vehicle
- B60L50/10—Electric propulsion with power supplied within the vehicle using propulsion power supplied by engine-driven generators, e.g. generators driven by combustion engines
- B60L50/16—Electric propulsion with power supplied within the vehicle using propulsion power supplied by engine-driven generators, e.g. generators driven by combustion engines with provision for separate direct mechanical propulsion
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60L—PROPULSION OF ELECTRICALLY-PROPELLED VEHICLES; SUPPLYING ELECTRIC POWER FOR AUXILIARY EQUIPMENT OF ELECTRICALLY-PROPELLED VEHICLES; ELECTRODYNAMIC BRAKE SYSTEMS FOR VEHICLES IN GENERAL; MAGNETIC SUSPENSION OR LEVITATION FOR VEHICLES; MONITORING OPERATING VARIABLES OF ELECTRICALLY-PROPELLED VEHICLES; ELECTRIC SAFETY DEVICES FOR ELECTRICALLY-PROPELLED VEHICLES
- B60L50/00—Electric propulsion with power supplied within the vehicle
- B60L50/50—Electric propulsion with power supplied within the vehicle using propulsion power supplied by batteries or fuel cells
- B60L50/60—Electric propulsion with power supplied within the vehicle using propulsion power supplied by batteries or fuel cells using power supplied by batteries
- B60L50/61—Electric propulsion with power supplied within the vehicle using propulsion power supplied by batteries or fuel cells using power supplied by batteries by batteries charged by engine-driven generators, e.g. series hybrid electric vehicles
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60L—PROPULSION OF ELECTRICALLY-PROPELLED VEHICLES; SUPPLYING ELECTRIC POWER FOR AUXILIARY EQUIPMENT OF ELECTRICALLY-PROPELLED VEHICLES; ELECTRODYNAMIC BRAKE SYSTEMS FOR VEHICLES IN GENERAL; MAGNETIC SUSPENSION OR LEVITATION FOR VEHICLES; MONITORING OPERATING VARIABLES OF ELECTRICALLY-PROPELLED VEHICLES; ELECTRIC SAFETY DEVICES FOR ELECTRICALLY-PROPELLED VEHICLES
- B60L2220/00—Electrical machine types; Structures or applications thereof
- B60L2220/10—Electrical machine types
- B60L2220/14—Synchronous machines
-
- Y—GENERAL TAGGING OF NEW TECHNOLOGICAL DEVELOPMENTS; GENERAL TAGGING OF CROSS-SECTIONAL TECHNOLOGIES SPANNING OVER SEVERAL SECTIONS OF THE IPC; TECHNICAL SUBJECTS COVERED BY FORMER USPC CROSS-REFERENCE ART COLLECTIONS [XRACs] AND DIGESTS
- Y02—TECHNOLOGIES OR APPLICATIONS FOR MITIGATION OR ADAPTATION AGAINST CLIMATE CHANGE
- Y02T—CLIMATE CHANGE MITIGATION TECHNOLOGIES RELATED TO TRANSPORTATION
- Y02T10/00—Road transport of goods or passengers
- Y02T10/60—Other road transportation technologies with climate change mitigation effect
- Y02T10/62—Hybrid vehicles
-
- Y—GENERAL TAGGING OF NEW TECHNOLOGICAL DEVELOPMENTS; GENERAL TAGGING OF CROSS-SECTIONAL TECHNOLOGIES SPANNING OVER SEVERAL SECTIONS OF THE IPC; TECHNICAL SUBJECTS COVERED BY FORMER USPC CROSS-REFERENCE ART COLLECTIONS [XRACs] AND DIGESTS
- Y02—TECHNOLOGIES OR APPLICATIONS FOR MITIGATION OR ADAPTATION AGAINST CLIMATE CHANGE
- Y02T—CLIMATE CHANGE MITIGATION TECHNOLOGIES RELATED TO TRANSPORTATION
- Y02T10/00—Road transport of goods or passengers
- Y02T10/60—Other road transportation technologies with climate change mitigation effect
- Y02T10/64—Electric machine technologies in electromobility
-
- Y—GENERAL TAGGING OF NEW TECHNOLOGICAL DEVELOPMENTS; GENERAL TAGGING OF CROSS-SECTIONAL TECHNOLOGIES SPANNING OVER SEVERAL SECTIONS OF THE IPC; TECHNICAL SUBJECTS COVERED BY FORMER USPC CROSS-REFERENCE ART COLLECTIONS [XRACs] AND DIGESTS
- Y02—TECHNOLOGIES OR APPLICATIONS FOR MITIGATION OR ADAPTATION AGAINST CLIMATE CHANGE
- Y02T—CLIMATE CHANGE MITIGATION TECHNOLOGIES RELATED TO TRANSPORTATION
- Y02T10/00—Road transport of goods or passengers
- Y02T10/60—Other road transportation technologies with climate change mitigation effect
- Y02T10/70—Energy storage systems for electromobility, e.g. batteries
-
- Y—GENERAL TAGGING OF NEW TECHNOLOGICAL DEVELOPMENTS; GENERAL TAGGING OF CROSS-SECTIONAL TECHNOLOGIES SPANNING OVER SEVERAL SECTIONS OF THE IPC; TECHNICAL SUBJECTS COVERED BY FORMER USPC CROSS-REFERENCE ART COLLECTIONS [XRACs] AND DIGESTS
- Y02—TECHNOLOGIES OR APPLICATIONS FOR MITIGATION OR ADAPTATION AGAINST CLIMATE CHANGE
- Y02T—CLIMATE CHANGE MITIGATION TECHNOLOGIES RELATED TO TRANSPORTATION
- Y02T10/00—Road transport of goods or passengers
- Y02T10/60—Other road transportation technologies with climate change mitigation effect
- Y02T10/7072—Electromobility specific charging systems or methods for batteries, ultracapacitors, supercapacitors or double-layer capacitors
Landscapes
- Engineering & Computer Science (AREA)
- Power Engineering (AREA)
- Transportation (AREA)
- Mechanical Engineering (AREA)
- Life Sciences & Earth Sciences (AREA)
- Sustainable Development (AREA)
- Sustainable Energy (AREA)
- Control Of Ac Motors In General (AREA)
- Hybrid Electric Vehicles (AREA)
- Electric Propulsion And Braking For Vehicles (AREA)
- Control Of Motors That Do Not Use Commutators (AREA)
Abstract
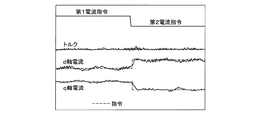
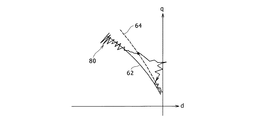
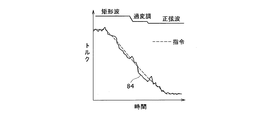
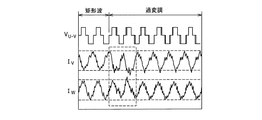
【解決手段】回転電機制御システム10の制御部30は、dq平面上において、回転電機を最大効率で運転できる最大効率特性線上で第1電流指令を実行する第1電流指令モジュール40と、回転電機の動作点が最大効率特性線よりも遅角側に予め設定された位相差を有する切替ラインを越えるときに矩形波電圧位相制御モードから過変調電流制御モードに切り替えるモード切替モジュール42と、過変調電流制御モードに切り替えた後、切替ライン上で第2電流指令を実行する第2電流指令モジュール44と、所定期間の間切替ライン上で第2電流指令を実行された後、再び最大効率特性線上における第1電流指令の実行に戻す復帰モジュール46とを備える。
【選択図】図1
Description
Claims (9)
- 正弦波電流制御モードと過変調電流制御モードと矩形波電圧位相制御モードとの間で制御を切り替える回転電機制御システムであって、
直交するd軸とq軸とで構成されるdq平面上において、回転電機を最大効率で運転できるd軸電流とq軸電流の電流組を結んで得られる最大効率特性線上で、第1電流指令を実行する第1電流指令手段と、
dq平面上で、回転電機の動作点が最大効率特性線よりも遅角側に予め設定された位相差を有する切替ラインを越えるときに矩形波電圧位相制御モードから過変調電流制御モードに切り替えるモード切替手段と、
過変調電流制御モードに切り替えた後、予め設定された所定期間の間は、切替ライン上で第2電流指令を実行する第2電流指令手段と、
を備えることを特徴とする回転電機制御システム。 - 請求項1に記載の回転電機制御システムにおいて、
第2電流指令手段によって所定期間の間切替ライン上で第2電流指令を実行された後、再び最大効率特性線上における第1電流指令の実行に戻す復帰手段を備えることを特徴とする回転電機制御システム。 - 請求項2に記載の回転電機制御システムにおいて、
復帰手段は、過変調電流制御モードから矩形波電圧指令制御モードへ制御を切り替えることで発生するチャタリングを防止できる遅れ時間に応じた時定数で制御周期を長めになまし変更して、切替ライン上から最大効率特性線上に電流指令の実行を戻すことを特徴とする回転電機制御システム。 - 請求項2に記載の回転電機制御システムにおいて、
復帰手段は、予め設定された電流指令値の変化率範囲内で切替ライン上から最大効率特性線上に電流指令の実行を戻すことを特徴とする回転電機制御システム。 - 請求項2に記載の回転電機制御システムにおいて、
dq平面上で最大効率特性線よりも遅角側で、切替ラインよりも進角側に予め設定される中間特性線上で電流指令を実行する中間電流指令実行手段を備え、
復帰手段は、切替ライン上から中間特性線上の電流指令の実行を経由して最大効率特性線上に電流指令の実行を戻すことを特徴とする回転電機制御システム。 - 請求項2に記載の回転電機制御システムにおいて、
復帰手段は、トルク一定の条件の下で、切替ライン上の第2電流指令値とこれに対応する最大効率特性線上の第1電流指令値との差である電流指令偏差が、予め設定される電流偏差閾値以下となったときに、同じ制御周期内で瞬時的に切替ライン上から最大効率特性線上に電流指令の実行を戻すことを特徴とする回転電機制御システム。 - 請求項2に記載の回転電機制御システムにおいて、
復帰手段は、dq平面上で、最大効率特性線に対応して予め計算によって求められるd軸電圧とq軸電圧の電圧組を結んで得られる第1電圧指令特性線と、切替ラインに対応して予め計算によって求められるd軸電圧とq軸電圧の電圧組を結んで得られる第2電圧指令特性線とが交差する電圧指令値に対応する電流指令値になったときに、切替ライン上から最大効率特性線上に電流指令の実行を戻すことを特徴とする回転電機制御システム。 - 請求項7に記載の回転電機制御システムにおいて、
復帰手段は、トルク一定の条件の下で、切替ライン上の第2電流指令値に対応する第2電圧指令特性線上の第2電圧指令値と、最大効率特性線上の第1電流指令値に対応する第1電圧指令特性線上の第1電圧指令値との偏差である電圧偏差がゼロとなる前に予め設定される電圧偏差閾値以下となったときに、切替ライン上から最大効率特性線上に電流指令の実行を戻すことを特徴とする回転電機制御システム。 - 請求項2に記載の回転電機制御システムにおいて、
復帰手段は、トルク一定の条件の下で、最大効率特性線上の第1電流指令値に対応する第1電圧指令特性線上の第1電圧指令値が正弦波電流制御モード実行領域に入ったときに、切替ライン上から最大効率特性線上に電流指令の実行を戻すことを特徴とする回転電機制御システム。
Priority Applications (2)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2008243738A JP5384068B2 (ja) | 2008-09-24 | 2008-09-24 | 回転電機制御システム |
| US12/566,049 US8269437B2 (en) | 2008-09-24 | 2009-09-24 | Rotary electric machine control system |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2008243738A JP5384068B2 (ja) | 2008-09-24 | 2008-09-24 | 回転電機制御システム |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2010081663A true JP2010081663A (ja) | 2010-04-08 |
| JP5384068B2 JP5384068B2 (ja) | 2014-01-08 |
Family
ID=42036943
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2008243738A Active JP5384068B2 (ja) | 2008-09-24 | 2008-09-24 | 回転電機制御システム |
Country Status (2)
| Country | Link |
|---|---|
| US (1) | US8269437B2 (ja) |
| JP (1) | JP5384068B2 (ja) |
Cited By (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2012029416A (ja) * | 2010-07-22 | 2012-02-09 | Hitachi Appliances Inc | 空気調和機 |
| WO2013038250A2 (en) | 2011-09-14 | 2013-03-21 | Toyota Jidosha Kabushiki Kaisha | Rotary electric machine control system and rotary electric machine control method |
| JP2019134630A (ja) * | 2018-02-01 | 2019-08-08 | 日産自動車株式会社 | 電動機の制御方法及び制御装置 |
Families Citing this family (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| DE102011076667A1 (de) * | 2011-05-30 | 2012-12-06 | Robert Bosch Gmbh | Verfahren zur Reduzierung des Anlaufstromes bei einer mit Blockkommutierung betriebenen mehrphasigen Maschine |
| TW201624873A (zh) * | 2014-12-31 | 2016-07-01 | 鴻海精密工業股份有限公司 | 電動車刹車回充控制系統及方法 |
| US9783063B2 (en) * | 2015-08-27 | 2017-10-10 | Texas Instruments Incorporated | Regenerative braking controller for electric motors |
Citations (6)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2000050686A (ja) * | 1998-07-29 | 2000-02-18 | Toyota Motor Corp | 交流電動機の駆動制御装置 |
| JP2001078495A (ja) * | 1999-07-08 | 2001-03-23 | Toyota Motor Corp | 交流電動機の駆動制御装置 |
| JP2007151336A (ja) * | 2005-10-27 | 2007-06-14 | Toyota Motor Corp | モータ駆動システム |
| JP2007306699A (ja) * | 2006-05-10 | 2007-11-22 | Toyota Industries Corp | モータインバータ |
| JP2008048505A (ja) * | 2006-08-11 | 2008-02-28 | Denso Corp | 3相回転機の制御装置 |
| JP2008206383A (ja) * | 2006-08-11 | 2008-09-04 | Denso Corp | 多相回転機の制御装置 |
Family Cites Families (6)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| EP1276886B1 (en) * | 2000-04-26 | 2012-11-28 | Monsanto Technology LLC | Method for the transformation of plant cell plastids |
| JP4706324B2 (ja) * | 2005-05-10 | 2011-06-22 | トヨタ自動車株式会社 | モータ駆動システムの制御装置 |
| JP2007159368A (ja) * | 2005-12-08 | 2007-06-21 | Toyota Motor Corp | モータ駆動システムの制御装置 |
| US7828093B2 (en) * | 2005-12-26 | 2010-11-09 | Toyota Jidosha Kabushiki Kaisha | Vehicle controller, vehicle and vehicle control method |
| JP4939127B2 (ja) | 2006-06-30 | 2012-05-23 | 株式会社豊田中央研究所 | 交流電動機の駆動制御装置及び駆動制御方法 |
| JP4720653B2 (ja) | 2006-07-07 | 2011-07-13 | トヨタ自動車株式会社 | 電動機制御装置およびそれを備えた車両 |
-
2008
- 2008-09-24 JP JP2008243738A patent/JP5384068B2/ja active Active
-
2009
- 2009-09-24 US US12/566,049 patent/US8269437B2/en not_active Expired - Fee Related
Patent Citations (6)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2000050686A (ja) * | 1998-07-29 | 2000-02-18 | Toyota Motor Corp | 交流電動機の駆動制御装置 |
| JP2001078495A (ja) * | 1999-07-08 | 2001-03-23 | Toyota Motor Corp | 交流電動機の駆動制御装置 |
| JP2007151336A (ja) * | 2005-10-27 | 2007-06-14 | Toyota Motor Corp | モータ駆動システム |
| JP2007306699A (ja) * | 2006-05-10 | 2007-11-22 | Toyota Industries Corp | モータインバータ |
| JP2008048505A (ja) * | 2006-08-11 | 2008-02-28 | Denso Corp | 3相回転機の制御装置 |
| JP2008206383A (ja) * | 2006-08-11 | 2008-09-04 | Denso Corp | 多相回転機の制御装置 |
Cited By (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2012029416A (ja) * | 2010-07-22 | 2012-02-09 | Hitachi Appliances Inc | 空気調和機 |
| WO2013038250A2 (en) | 2011-09-14 | 2013-03-21 | Toyota Jidosha Kabushiki Kaisha | Rotary electric machine control system and rotary electric machine control method |
| US9515583B2 (en) | 2011-09-14 | 2016-12-06 | Toyota Jidosha Kabushiki Kaisha | Rotary electric machine control system and rotary electric machine control method |
| DE112012003822B4 (de) | 2011-09-14 | 2020-07-30 | Aisin Aw Co., Ltd. | Steuersystem für eine elektrische Drehmaschine und Steuerverfahren für eine drehende elektrische Maschine |
| JP2019134630A (ja) * | 2018-02-01 | 2019-08-08 | 日産自動車株式会社 | 電動機の制御方法及び制御装置 |
Also Published As
| Publication number | Publication date |
|---|---|
| JP5384068B2 (ja) | 2014-01-08 |
| US20100072926A1 (en) | 2010-03-25 |
| US8269437B2 (en) | 2012-09-18 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| US7893637B2 (en) | Motor drive system | |
| JP5311950B2 (ja) | 回転電機制御システム | |
| US7443116B2 (en) | Electrically powered vehicle mounting electric motor and control method therefor | |
| US7701156B2 (en) | Electric motor drive control system and control method thereof | |
| JP6179494B2 (ja) | 交流電動機の制御装置 | |
| US7928686B2 (en) | Electric motor control device, electric vehicle, and hybrid electric vehicle | |
| JP4844753B2 (ja) | 電気自動車の制御装置 | |
| US9413281B2 (en) | Apparatus for controlling AC motor | |
| JP5633639B2 (ja) | 電動機の制御装置およびそれを備える電動車両、ならびに電動機の制御方法 | |
| US20110187308A1 (en) | Control device and control method for alternating-current motor | |
| US20100012408A1 (en) | Drive control apparatus for rotating electric machine and vehicle | |
| JP5781875B2 (ja) | 回転電機制御システム | |
| JP5221261B2 (ja) | 回転電機制御システム | |
| JP5384068B2 (ja) | 回転電機制御システム | |
| JP2018133935A (ja) | インバータ装置および電動車両 | |
| JP2007159307A (ja) | 電気自動車の制御装置 | |
| JP2010178444A (ja) | 回転電機制御システム | |
| WO2018139298A1 (ja) | 交流電動機の制御装置 | |
| JP5614189B2 (ja) | 車両用回転電機の駆動制御装置 | |
| JP2009201250A (ja) | モータの制御装置 | |
| JP2010183661A (ja) | 回転電機制御システム | |
| JP2010172109A (ja) | 回転電機制御装置 | |
| JP2012090490A (ja) | モータ駆動制御システムの制御装置およびそれを搭載する車両 | |
| JP5412930B2 (ja) | 回転電機制御システム | |
| JP5782945B2 (ja) | 駆動制御装置、及び、駆動制御方法 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A711 | Notification of change in applicant |
Free format text: JAPANESE INTERMEDIATE CODE: A711 Effective date: 20100607 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A821 Effective date: 20100607 |
|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20101112 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20120808 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20121120 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20130910 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20131002 |
|
| R151 | Written notification of patent or utility model registration |
Ref document number: 5384068 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R151 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |