JP2010058211A - 作業工具 - Google Patents
作業工具 Download PDFInfo
- Publication number
- JP2010058211A JP2010058211A JP2008225310A JP2008225310A JP2010058211A JP 2010058211 A JP2010058211 A JP 2010058211A JP 2008225310 A JP2008225310 A JP 2008225310A JP 2008225310 A JP2008225310 A JP 2008225310A JP 2010058211 A JP2010058211 A JP 2010058211A
- Authority
- JP
- Japan
- Prior art keywords
- grip
- finger
- hand grip
- tool
- hand
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Granted
Links
- 210000003811 finger Anatomy 0.000 claims description 72
- 210000004932 little finger Anatomy 0.000 claims description 12
- 230000005484 gravity Effects 0.000 claims description 4
- 238000003754 machining Methods 0.000 claims description 3
- 238000002347 injection Methods 0.000 description 13
- 239000007924 injection Substances 0.000 description 13
- 239000000463 material Substances 0.000 description 12
- 238000002485 combustion reaction Methods 0.000 description 9
- 239000000446 fuel Substances 0.000 description 7
- 238000000034 method Methods 0.000 description 5
- 230000002093 peripheral effect Effects 0.000 description 5
- 239000007779 soft material Substances 0.000 description 3
- 229920003002 synthetic resin Polymers 0.000 description 3
- 239000000057 synthetic resin Substances 0.000 description 3
- 239000000470 constituent Substances 0.000 description 1
- 238000005553 drilling Methods 0.000 description 1
- 230000012447 hatching Effects 0.000 description 1
- 230000002265 prevention Effects 0.000 description 1
- 229920005989 resin Polymers 0.000 description 1
- 239000011347 resin Substances 0.000 description 1
- 238000007790 scraping Methods 0.000 description 1
- 229920002994 synthetic fiber Polymers 0.000 description 1
- 210000003813 thumb Anatomy 0.000 description 1
- XLYOFNOQVPJJNP-UHFFFAOYSA-N water Substances O XLYOFNOQVPJJNP-UHFFFAOYSA-N 0.000 description 1
Images








Classifications
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B25—HAND TOOLS; PORTABLE POWER-DRIVEN TOOLS; MANIPULATORS
- B25F—COMBINATION OR MULTI-PURPOSE TOOLS NOT OTHERWISE PROVIDED FOR; DETAILS OR COMPONENTS OF PORTABLE POWER-DRIVEN TOOLS NOT PARTICULARLY RELATED TO THE OPERATIONS PERFORMED AND NOT OTHERWISE PROVIDED FOR
- B25F5/00—Details or components of portable power-driven tools not particularly related to the operations performed and not otherwise provided for
- B25F5/02—Construction of casings, bodies or handles
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B25—HAND TOOLS; PORTABLE POWER-DRIVEN TOOLS; MANIPULATORS
- B25C—HAND-HELD NAILING OR STAPLING TOOLS; MANUALLY OPERATED PORTABLE STAPLING TOOLS
- B25C1/00—Hand-held nailing tools; Nail feeding devices
- B25C1/08—Hand-held nailing tools; Nail feeding devices operated by combustion pressure
Landscapes
- Engineering & Computer Science (AREA)
- Mechanical Engineering (AREA)
- Chemical & Material Sciences (AREA)
- Combustion & Propulsion (AREA)
- Portable Power Tools In General (AREA)
- Portable Nailing Machines And Staplers (AREA)
Abstract
【解決手段】 先端工具を駆動して所定の加工作業を行う作業工具において、工具本体101と、工具本体101に設けられたハンドグリップ103とを有し、ハンドグリップ103は、作業者が手指で把持するグリップ面に当該グリップ面から隆起する複数の突条117を並行状に備え、グリップ把持状態の手指の延在方向をハンドグリップ103の周方向と定義したとき、複数の突条117は、ハンドグリップの周中心軸方向、すなわち長手方向のグリップ面形状に沿って延在されるとともに、ハンドグリップ103の周方向につき、少なくとも第3指〜第5指の指先の指腹に対して一方向には掛かり、他方向には掛からない隆起形状を有することを特徴とする作業工具。
【選択図】 図3
Description
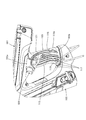
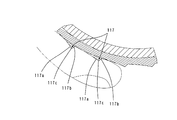
以下、本発明の第1の実施形態につき、図面を参照しつつ、詳細に説明する。本実施の形態は、作業工具の一例としてガス燃焼式の釘打機を用いて説明する。図1には本実施の形態に係る釘打機100の全体構成が外観図として示される。図2にはハンドグリップ103の外観が拡大図として示される。また、図3にはハンドグリップ103の断面形状が示され、図4及び図5にはハンドグリップ103に設定されるリブ117の断面形状が拡大図として示される。
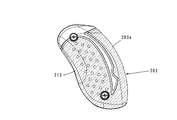
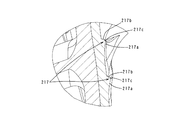
次に、本発明の第2の実施形態につき、図6〜図12を参照しつつ説明する。本実施の形態は、被加工材の面取り、切り抜き等を行なう電動ルーター200に用いられている耳型のハンドグリップ203にリブ217を設定したものである。図6に電動ルーター200の全体構成が正面図として示される。
また、上述した実施の形態は、釘打機100のハンドグリップ103と、電動ルーター200のハンドグリップ203に適用した場合で説明したが、適用範囲については、これに限定するものではない。
(態様1)
「グリップ把持状態の手指の小指球が当接する後面領域に設定される滑り止め部は、前記後面領域を含む端部領域の周長を当該端部領域よりも中側の中央領域の周長よりも長くすることで設定されている。」
「第1指置き部は、少なくともその一部が前記突条部の延在方向の延長線上に位置するように設定されている。」
「前記ハンドグリップが長尺状に形成される場合において、前記突条が連続して延在している。」
「前記ハンドグリップがT型グリップとして形成される場合において、前記突条がT字の脚部を挟んで両側に配置されている。」
101 本体部(工具本体)
103 ハンドグリップ
103a グリップ基端
103b グリップ先端
105 マガジン
107 コンタクトアーム
109 トリガ
110 射出部
113 グリップ前当て部
115 グリップ後当て部
117 リブ(突条)
117a 緩斜面(他方側の斜面)
117b 急斜面(一方側の斜面)
117c 頂部
119 グリップ端部領域
119a 小指球当接領域(後面領域)
121 第1指置き場
200 電動ルーター(作業工具)
201 ルーター本体部(工具本体)
203 ハンドグリップ
203a T字の脚部に相当する部位
203b T字の頭部に相当する部位
205 テーブル
213 グリップ当て部
217 リブ(突条)
217a 緩斜面(一方の斜面)
217b 急斜面(他方の斜面)
217c 頂部
Claims (4)
- 先端工具を駆動して所定の加工作業を行う作業工具であって、
工具本体と、前記工具本体に設けられたハンドグリップとを有し、
前記ハンドグリップは、作業者が手指で把持するグリップ面に当該グリップ面から隆起する複数の突条を並行状に備え、
グリップ把持状態の手指の延在方向を前記ハンドグリップの周方向と定義したとき、前記複数の突条は、ハンドグリップの周中心軸方向、すなわち長手方向のグリップ面形状に沿って延在されるとともに、前記ハンドグリップの周方向につき、少なくとも第3指〜第5指の指先の指腹に対して一方向には掛かり、他方向には掛からない隆起形状を有することを特徴とする作業工具。 - 請求項1に記載の作業工具であって、
前記複数の突条は、延在方向と交差する方向の断面形状が山形に形成されており、当該山形形状につき、前記グリップ面側から頂部に向かって延びる一方側の斜面が他方側の斜面よりも短く形成されていることを特徴とする作業工具。 - 請求項1または2に記載の作業工具であって、
前記工具本体部の長軸方向を水平状態とした場合において、前記ハンドグリップに対して、グリップ把持状態の第2指を伸ばした方向の前方側で、かつ上方に作業工具の重心位置が設定されており、
前記ハンドグリップは、前記工具本体の長軸方向と交差する方向に長尺状に形成されるとともに、当該長軸方向の端部領域のうち、グリップ把持状態の手指の小指球が当接する後面領域に滑り止め部を設定したことを特徴とする作業工具。 - 請求項1〜3のいずれか1つに記載の作業工具であって、
前記ハンドグリップは、前記工具本体の長軸方向と交差する方向に長尺状に形成されるとともに、当該長軸方向の端部領域のうち、グリップ把持状態の手指の第1指側の端部領域には、当該第1指の指腹が置かれる第1指置き部が設けられ、当該第1指置き部は、前記グリップ面よりも凹んでいることを特徴とする作業工具。
Priority Applications (5)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2008225310A JP5185741B2 (ja) | 2008-09-02 | 2008-09-02 | 作業工具 |
| CN200910163895XA CN101664920B (zh) | 2008-09-02 | 2009-08-14 | 作业工具 |
| US12/461,947 US8387847B2 (en) | 2008-09-02 | 2009-08-28 | Power tool |
| RU2009132896/02A RU2509642C2 (ru) | 2008-09-02 | 2009-09-01 | Приводной инструмент |
| EP09011228.5A EP2159010B1 (en) | 2008-09-02 | 2009-09-01 | Power tool |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2008225310A JP5185741B2 (ja) | 2008-09-02 | 2008-09-02 | 作業工具 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2010058211A true JP2010058211A (ja) | 2010-03-18 |
| JP5185741B2 JP5185741B2 (ja) | 2013-04-17 |
Family
ID=41351637
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2008225310A Active JP5185741B2 (ja) | 2008-09-02 | 2008-09-02 | 作業工具 |
Country Status (5)
| Country | Link |
|---|---|
| US (1) | US8387847B2 (ja) |
| EP (1) | EP2159010B1 (ja) |
| JP (1) | JP5185741B2 (ja) |
| CN (1) | CN101664920B (ja) |
| RU (1) | RU2509642C2 (ja) |
Cited By (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2012196733A (ja) * | 2011-03-22 | 2012-10-18 | Makita Corp | 電動工具 |
| JP2014028412A (ja) * | 2012-07-31 | 2014-02-13 | Makita Corp | 動力工具 |
| JP2014124725A (ja) * | 2012-12-26 | 2014-07-07 | Hitachi Koki Co Ltd | 動力工具 |
| JP2020178856A (ja) * | 2019-04-24 | 2020-11-05 | 株式会社フタバ | 採血用穿刺具 |
Families Citing this family (7)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| DE202011050394U1 (de) * | 2011-06-08 | 2012-09-10 | Makita Corporation | Schutzhaube für ein handhaltbares Motorarbeitsgerät |
| US20160288314A1 (en) * | 2015-03-31 | 2016-10-06 | Fiskars Brands, Inc. | Variable friction grip pattern |
| US10967492B2 (en) | 2018-11-19 | 2021-04-06 | Brahma Industries LLC | Staple gun with automatic depth adjustment |
| US11141849B2 (en) | 2018-11-19 | 2021-10-12 | Brahma Industries LLC | Protective shield for use with a staple gun |
| US10933521B2 (en) | 2018-11-19 | 2021-03-02 | Brahma Industries LLC | Staple gun with self-centering mechanism |
| US11806854B2 (en) | 2019-02-19 | 2023-11-07 | Brahma Industries LLC | Insert for palm stapler, a palm stapler and a method of use thereof |
| DE102019126493A1 (de) * | 2019-10-01 | 2021-04-01 | Steinel Gmbh | Elektrisches, pistolenartiges Handgerät |
Citations (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPS61209884A (ja) * | 1985-03-09 | 1986-09-18 | 松下電工株式会社 | 電動工具のグリツプ |
| JP2002192885A (ja) * | 2000-11-10 | 2002-07-10 | Berol Corp | 筆記用具 |
Family Cites Families (21)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US5097566A (en) * | 1987-10-07 | 1992-03-24 | Bettcher Industries, Inc. | Slip-resistant cushioning covers for handles |
| USD324801S (en) * | 1989-07-25 | 1992-03-24 | Snap-On Tools Corporation | Angle head impact wrench |
| US5027511A (en) * | 1990-09-28 | 1991-07-02 | The Gillette Company | Shaving system |
| US5234740A (en) * | 1991-08-28 | 1993-08-10 | Minnesota Mining And Manufacturing Company | Slip control sheeting and articles covered with same |
| US5299475A (en) * | 1993-01-26 | 1994-04-05 | Stroop Jeffrey A | Tool and adjustable handgrip |
| US6237193B1 (en) * | 1999-03-02 | 2001-05-29 | Robinson Knife Company | Compressible handle |
| US6332381B1 (en) * | 1999-04-06 | 2001-12-25 | Maxtech Manufacturing Inc. | Hex key gripping aid |
| US6308378B1 (en) * | 1999-06-01 | 2001-10-30 | Porter-Cable Corporation | Frictional gripping arrangement for a power tool handle |
| JP2001198856A (ja) * | 2000-01-13 | 2001-07-24 | Hitachi Koki Co Ltd | 電動工具 |
| US6443675B1 (en) | 2000-02-17 | 2002-09-03 | Roto Zip Tool Corporation | Hand-held power tool |
| JP2002254341A (ja) | 2001-03-02 | 2002-09-10 | Hitachi Koki Co Ltd | 電動工具 |
| US20060075605A1 (en) * | 2002-08-02 | 2006-04-13 | Mike Lagaly | Adjustable grasping assembly for tools |
| GB0224955D0 (en) * | 2002-10-28 | 2002-12-04 | Black & Decker Inc | Handle assembly for tool |
| CN2623412Y (zh) * | 2003-06-02 | 2004-07-07 | 王胜喜 | 防滑螺丝刀 |
| US20050055835A1 (en) | 2003-09-15 | 2005-03-17 | Mentor Group Llc | Slip-resistant hand tool handle |
| US6976405B2 (en) * | 2004-03-12 | 2005-12-20 | Medical Associates, Inc. | Detachment tool |
| JP4456499B2 (ja) * | 2005-02-10 | 2010-04-28 | 株式会社マキタ | 作業工具 |
| USD525848S1 (en) * | 2005-04-22 | 2006-08-01 | Makita Corporation | Portable electric drill |
| JP2007160420A (ja) * | 2005-12-09 | 2007-06-28 | Matsushita Electric Works Ltd | 打撃工具 |
| USD539110S1 (en) * | 2006-03-06 | 2007-03-27 | Makita Corporation | Portable electric drill |
| JP5068155B2 (ja) | 2007-12-26 | 2012-11-07 | 株式会社マキタ | 作業工具 |
-
2008
- 2008-09-02 JP JP2008225310A patent/JP5185741B2/ja active Active
-
2009
- 2009-08-14 CN CN200910163895XA patent/CN101664920B/zh active Active
- 2009-08-28 US US12/461,947 patent/US8387847B2/en active Active
- 2009-09-01 RU RU2009132896/02A patent/RU2509642C2/ru active
- 2009-09-01 EP EP09011228.5A patent/EP2159010B1/en active Active
Patent Citations (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPS61209884A (ja) * | 1985-03-09 | 1986-09-18 | 松下電工株式会社 | 電動工具のグリツプ |
| JP2002192885A (ja) * | 2000-11-10 | 2002-07-10 | Berol Corp | 筆記用具 |
Cited By (8)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2012196733A (ja) * | 2011-03-22 | 2012-10-18 | Makita Corp | 電動工具 |
| JP2014028412A (ja) * | 2012-07-31 | 2014-02-13 | Makita Corp | 動力工具 |
| JP2014124725A (ja) * | 2012-12-26 | 2014-07-07 | Hitachi Koki Co Ltd | 動力工具 |
| US9505120B2 (en) | 2012-12-26 | 2016-11-29 | Hitachi Koki Co., Ltd. | Power tool |
| JP2020178856A (ja) * | 2019-04-24 | 2020-11-05 | 株式会社フタバ | 採血用穿刺具 |
| JP7038416B2 (ja) | 2019-04-24 | 2022-03-18 | 株式会社フタバ | 採血用穿刺具 |
| JP2022048211A (ja) * | 2019-04-24 | 2022-03-25 | 株式会社フタバ | 採血用穿刺具 |
| JP7377566B2 (ja) | 2019-04-24 | 2023-11-10 | 株式会社フタバ | 採血用穿刺具 |
Also Published As
| Publication number | Publication date |
|---|---|
| JP5185741B2 (ja) | 2013-04-17 |
| US20100050830A1 (en) | 2010-03-04 |
| EP2159010A2 (en) | 2010-03-03 |
| EP2159010B1 (en) | 2015-10-14 |
| RU2509642C2 (ru) | 2014-03-20 |
| CN101664920A (zh) | 2010-03-10 |
| EP2159010A3 (en) | 2012-03-14 |
| CN101664920B (zh) | 2011-05-11 |
| RU2009132896A (ru) | 2011-03-10 |
| US8387847B2 (en) | 2013-03-05 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP5185741B2 (ja) | 作業工具 | |
| US11260518B2 (en) | Ergonomic handle for power tool | |
| US11707830B2 (en) | Power tool with ergonomic handgrip | |
| US6135521A (en) | Push stick | |
| US8261853B2 (en) | Ergonomic handle for a power tool | |
| JP5068155B2 (ja) | 作業工具 | |
| EP1637290A1 (en) | Power hand tool | |
| TW200904572A (en) | Jab saw with accessible internal fastening location | |
| JP2010184304A5 (ja) | ||
| JP4525298B2 (ja) | 携帯用工具 | |
| US7886641B2 (en) | Push block having retractable heel | |
| JP6250989B2 (ja) | 携帯式作業機用のグリップ及びこれを備えた刈払機 | |
| US20060208243A1 (en) | Staple removing bit especially for upholstery | |
| JP2015116618A (ja) | 携帯型作業機 | |
| JP2006116626A (ja) | 携帯用工具 | |
| JP2008062347A (ja) | 動力工具 | |
| JP2008284617A (ja) | 可搬型動力工具 | |
| JP4325383B2 (ja) | 電動工具 | |
| CN203236452U (zh) | 动力工具 | |
| JP5468340B2 (ja) | 手持ち工具のハンドル部 | |
| JP3157162U (ja) | 折込鋸 | |
| JP2024099051A (ja) | 打込み工具 | |
| JP2011073175A (ja) | レシプロソー | |
| JP2013018059A (ja) | 打叩用工具 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20110318 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20121017 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20121022 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20121203 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20121220 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20130118 |
|
| R150 | Certificate of patent or registration of utility model |
Ref document number: 5185741 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 Free format text: JAPANESE INTERMEDIATE CODE: R150 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20160125 Year of fee payment: 3 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |