JP2010054497A - 超音波探傷の感度設定方法および超音波探傷装置 - Google Patents
超音波探傷の感度設定方法および超音波探傷装置 Download PDFInfo
- Publication number
- JP2010054497A JP2010054497A JP2009121021A JP2009121021A JP2010054497A JP 2010054497 A JP2010054497 A JP 2010054497A JP 2009121021 A JP2009121021 A JP 2009121021A JP 2009121021 A JP2009121021 A JP 2009121021A JP 2010054497 A JP2010054497 A JP 2010054497A
- Authority
- JP
- Japan
- Prior art keywords
- ultrasonic probe
- ultrasonic
- reception
- sensitivity
- probe
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Granted
Links
Images













Abstract
【解決手段】電気信号によって駆動され超音波を基準となる試験片及び試験体中に送信する送信用の超音波探触子と、送信用の超音波探触子と離隔して設けられ、試験片及び試験体の表面に沿って伝搬する波動を電気信号として受信する受信用の超音波探触子と、送信用の超音波探触子を励振し、かつ、受信用の超音波探触子からの電気信号を受信する送受信器とを備え、送受信器は、試験片の表面に沿って伝搬する波動に基づく受信信号の受信感度と、送信用の超音波探触子と受信用の超音波探触子との間の距離を同じにして、試験片の代わりに試験体を用いた際の、試験体の表面に沿って伝搬する波動に基づく受信信号の受信感度とを記憶し、2つの受信信号の受信感度の比または差に基づいて超音波探傷の感度補正を行う。
【選択図】図1
Description
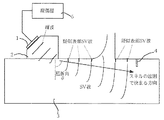
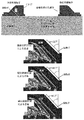
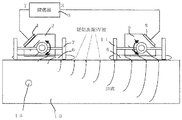
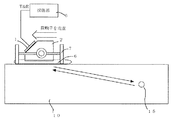
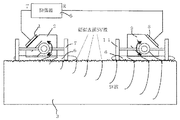
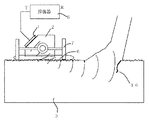
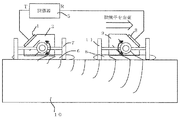
この発明の実施の形態1における超音波探傷の感度設定方法及び超音波探傷装置について、図9〜図16を参照しながら説明する。図9は、この発明の実施の形態1における超音波探傷装置の構成及び動作を示す図である。図10は、表面が滑らかな試験片10で受信される疑似表面SV波の透過パルスを説明する図である。図11は、探傷器5の設定を一探触子法とした場合の構成及び動作を示す図である。図12は、横穴15からのエコーのMAスコープを説明する図である。図13は、探傷器5の設定を再び二探触子法にした場合の構成及び動作を示す図である。図14は、表面が粗い試験体3で受信される疑似表面SV波の透過パルスを説明する図である。図15は、この発明の超音波探傷装置の動作を説明する図である。図16は、きず性状の評価を説明する図である。
B−(A−C)
の値を求める。この値を探傷感度として探傷器5に設定する。なお、感度補正量の計算は、作業者が行っても構わないが、探傷器5に補正量を計算する機能を設け、この機能を用いて補正量を計算しても良い。さらに、感度設定も、作業者が行っても構わないが、探傷器5に感度設定する機能を設け、この機能を用いて感度設定しても良い。
(i)音速の差異による音場変化の補正を、角度調整機構7及び11で行う、
(ii)表面状態及び音響インピーダンスによる伝達効率の補正を、探傷器5の感度設定で行う、
という2段階の補正により、精度の良い感度設定を行うことが特徴である。この際、角度調整機構7及び11を用いた補正を先に行うことが重要である。何故なら、角度調整機構7及び11を用いて補正して始めて伝達効率による差異が明らかになるからである。
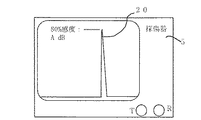
この発明の実施の形態2における超音波探傷の感度設定方法及び超音波探傷装置について、図17〜図19を参照しながら説明する。図17は、探傷器5の設定を二探触子法とし、表面が滑らかな試験片10を用いてエコー高さ区分線を作成する装置の構成及び動作を示す図である。また、図18は、透過パルス20のMAスコープを説明する図であり、図19は、きず性状の評価を説明する図である。
D−(A−C)
の値を求める。この値を探傷感度として探傷器5に設定する。なお、感度補正量の計算は作業者が行っても構わないが、探傷器5に補正量を計算する機能を設け、この機能を用いて補正量を計算しても良い。さらに感度設定も作業者が行っても構わないが、探傷器5に感度設定する機能を設け、この機能を用いて感度設定しても良い。
この発明の実施の形態3における超音波探傷の感度設定方法及び超音波探傷装置について、図20〜図22を参照しながら説明する。図20は、探傷器5の設定を二探触子法とし、実際の試験体3を用いてエコー高さ区分線を作成する装置の構成及び動作を示す図である。また、図21は、透過パルス22のMAスコープを説明する図であり、図22は、きず性状の評価を説明する図である。
Claims (16)
- 送信用の超音波探触子によって超音波を基準となる試験片中に送信し、
前記試験片の表面に沿って伝搬する波動を前記送信用の超音波探触子と離隔して設けられた受信用の超音波探触子で受信して受信信号の受信感度を記憶し、
前記送信用の超音波探触子と前記受信用の超音波探触子と間の距離を同じにして、前記試験片の代わりに実際の試験体を用い、前記送信用の超音波探触子によって超音波を前記試験体中に送信し、
前記試験体の表面に沿って伝搬する波動を前記受信用の超音波探触子で受信して受信信号の受信感度を記憶し、
前記2つの受信信号の受信感度の比または差に基づいて超音波探傷の感度補正を行う
ことを特徴とする超音波探傷の感度設定方法。 - 請求項1に記載の超音波探傷の感度設定方法において、
前記送信用の超音波探触子の角度及び前記受信用の超音波探触子の角度を、前記試験片及び実際の試験体の表面に沿って伝搬する波動による受信信号の振幅が最大となるように調整して、前記2つの受信信号の受信感度をそれぞれ記憶する
ことを特徴とする超音波探傷の感度設定方法。 - 請求項1または2に記載の超音波探傷の感度設定方法において、
前記受信用の超音波探触子の角度を、前記試験片及び前記試験体の表面に沿って伝搬する波動が前記受信用の超音波探触子のくさび内に形成する波面に対し、前記受信用の超音波探触子に用いられている振動子が平行となるように角度を調整すると共に、前記送信用の超音波探触子の角度を、前記受信用の超音波探触子と同様に調整して、前記2つの受信信号の受信感度をそれぞれ記憶する
ことを特徴とする超音波探傷の感度設定方法。 - 請求項2または3に記載の超音波探傷の感度設定方法において、
前記送信用の超音波探触子または前記受信用の超音波探触子のどちらか一方を、送受兼用の超音波探触子として用い、
前記送受兼用の超音波探触子の角度を、前記試験片の表面に沿って伝搬する波動の受信信号の振幅が最大となるように調整した状態で固定しておき、
前記試験片中の基準となる反射源からエコーを受信し、前記送受兼用の超音波探触子を走査して前記反射源からのエコー高さとビーム路程との関係とその時の感度を記憶し、
前記エコー高さとビーム路程との関係を求めた時の感度の補正を、前記2つの受信信号の受信感度の比または差に基づいて行う
ことを特徴とする超音波探傷の感度設定方法。 - 請求項2または3に記載の超音波探傷の感度設定方法において、
前記送信用の超音波探触子の角度および前記受信用の超音波探触子の角度を、前記試験片の表面に沿って伝搬する波動の受信信号の振幅が最大となるようにそれぞれ調整した状態で固定しておき、
前記送信用の超音波探触子あるいは受信用の探触子を前記試験片の表面で走査して、前記試験片の表面に沿って伝搬する波動の受信信号の振幅とビーム路程との関係と、その時の感度を記憶し、
前記受信信号の振幅とビーム路程との関係を求めた時の感度の補正を、前記2つの受信信号の受信感度の比または差に基づいて行う
ことを特徴とする超音波探傷の感度設定方法。 - 送信用の超音波探触子によって超音波を実際の試験体中に送信し、
前記試験体の表面に沿って伝搬する波動を前記送信用の超音波探触子と離隔して設けられた受信用の超音波探触子で受信し、
前記送信用の超音波探触子または受信用の超音波探触子のいずれかを前記試験体の表面で走査して、前記試験体の表面に沿って伝搬する波動の受信信号の振幅とビーム路程との関係を求めて感度の基準とする
ことを特徴とする超音波探傷の感度設定方法。 - 請求項6に記載の超音波探傷の感度設定方法において、
前記送信用の超音波探触子の角度及び前記受信用の超音波探触子の角度を、前記試験体の表面に沿って伝搬する波動による受信信号の振幅が最大となるように調整して、前記受信信号の振幅とビーム路程との関係を求める
ことを特徴とする超音波探傷の感度設定方法。 - 請求項6または7に記載の超音波探傷の感度設定方法において、
前記受信用の超音波探触子の角度を、前記試験体の表面に沿って伝搬する波動が前記受信用の超音波探触子のくさび内に形成する波面に対し、前記受信用の超音波探触子に用いられている振動子が平行となるように調整すると共に、
前記送信用の超音波探触子の角度を、前記試験体の表面に沿って伝搬する波動が前記送信用の超音波探触子のくさび内に形成する波面に対し、前記送信用の超音波探触子に用いられている振動子が平行となるように調整して、
前記受信信号の振幅とビーム路程との関係を求める
ことを特徴とする超音波探傷の感度設定方法。 - 電気信号によって駆動され超音波を基準となる試験片及び実際の試験体中に送信する送信用の超音波探触子と、
前記送信用の超音波探触子と離隔して設けられ、前記試験片及び前記試験体の表面に沿って伝搬する波動を電気信号として受信する受信用の超音波探触子と、
前記送信用の超音波探触子を励振し、かつ、前記受信用の超音波探触子からの電気信号を受信する送受信器と
を備え、
前記送受信器は、前記試験片の表面に沿って伝搬する波動に基づく受信信号の受信感度と、前記送信用の超音波探触子と前記受信用の超音波探触子との間の距離を同じにして、前記試験片の代わりに前記試験体を用いた際の、前記試験体の表面に沿って伝搬する波動に基づく受信信号の受信感度とをそれぞれ記憶し、2つの受信信号の受信感度の比または差に基づいて超音波探傷の感度補正を行う
ことを特徴とする超音波探傷装置。 - 請求項9に記載の超音波探傷装置において、
前記送信用の超音波探触子及び前記受信用の超音波探触子の角度を、前記試験片及び前記試験体の表面に沿って伝搬する波動による受信信号の振幅が最大となるようにそれぞれ調整するための角度調整機構をさらに備えた
ことを特徴とする超音波探傷装置。 - 請求項9または10に記載の超音波探傷装置において、
前記角度調整機構は、前記受信用の超音波探触子の角度を、前記試験片及び前記試験体の表面に沿って伝搬する波動が前記受信用の超音波探触子のくさび内に形成する波面に対し、前記受信用の超音波探触子に用いられている振動子が平行となるように角度を調整すると共に、前記送信用の超音波探触子の角度を、前記受信用の超音波探触子と同様に調整する
ことを特徴とする超音波探傷装置。 - 請求項10または11に記載の超音波探傷装置において、
前記送信用の超音波探触子または前記受信用の超音波探触子のどちらか一方を、送受兼用の超音波探触子として用い、
前記角度調整機構は、前記送受兼用の超音波探触子の角度を、前記試験片の表面に沿って伝搬する波動の受信信号の振幅が最大となるように調整した状態で固定しておき、
前記送受信器は、前記試験片中の基準となる反射源からエコーを受信し、前記送受兼用の超音波探触子を走査して前記反射源からのエコー高さとビーム路程との関係とその時の感度を記憶し、
前記エコー高さとビーム路程との関係を求めた時の感度の補正を、前記2つの受信信号の受信感度の比または差に基づいて行う
ことを特徴とする超音波探傷装置。 - 請求項10または11に記載の超音波探傷装置において、
前記角度調整機構は、前記送信用の超音波探触子および受信用の探触子の角度を、前記試験片の表面に沿って伝搬する波動の受信信号の振幅が最大となるようにそれぞれ調整した状態で固定しておき、
前記送受信器は、前記送信用あるいは受信用の超音波探触子を走査して前記試験片の表面に沿って伝搬する波動の受信信号の振幅とビーム路程との関係と、その時の感度を記憶し、
前記受信信号の振幅とビーム路程との関係を求めた時の感度の補正を、前記2つの受信信号の受信感度の比または差に基づいて行う
ことを特徴とする超音波探傷装置。 - 超音波を実際の試験体中に送信する送信用の超音波探触子と、
前記送信用の超音波探触子と離隔して設けられ、前記試験体の表面に沿って伝搬する波動を受信する受信用の超音波探触子と、
前記送信用の超音波探触子を励振し、かつ前記受信用の超音波探触子からの電気信号を受信する送受信器と
を備え、
前記送受信器は、前記送信用あるいは受信用の超音波探触子を走査して前記試験体の表面に沿って伝搬する波動の受信信号の振幅とビーム路程との関係を求めて感度の基準とする
ことを特徴とする超音波探傷装置。 - 請求項14に記載の超音波探傷装置において、
前記送信用の超音波探触子及び前記受信用の超音波探触子の角度を、前記試験体の表面に沿って伝搬する波動による受信信号の振幅が最大となるようにそれぞれ調整するための角度調整機構をさらに備えた
ことを特徴とする超音波探傷装置。 - 請求項14または15に記載の超音波探傷装置において、
前記角度調整機構は、前記受信用の超音波探触子の角度を、前記試験体の表面に沿って伝搬する波動が前記受信用の超音波探触子のくさび内に形成する波面に対し、前記受信用の超音波探触子に用いられている振動子が平行となるように調整すると共に、前記送信用の超音波探触子の角度を、前記試験体の表面に沿って伝搬する波動が前記送信用の超音波探触子のくさび内に形成する波面に対し、前記送信用の超音波探触子に用いられている振動子が平行となるように調整する
ことを特徴とする超音波探傷装置。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2009121021A JP5633059B2 (ja) | 2008-07-31 | 2009-05-19 | 超音波探傷の感度設定方法および超音波探傷装置 |
Applications Claiming Priority (3)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2008198218 | 2008-07-31 | ||
| JP2008198218 | 2008-07-31 | ||
| JP2009121021A JP5633059B2 (ja) | 2008-07-31 | 2009-05-19 | 超音波探傷の感度設定方法および超音波探傷装置 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2010054497A true JP2010054497A (ja) | 2010-03-11 |
| JP5633059B2 JP5633059B2 (ja) | 2014-12-03 |
Family
ID=42070562
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2009121021A Active JP5633059B2 (ja) | 2008-07-31 | 2009-05-19 | 超音波探傷の感度設定方法および超音波探傷装置 |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP5633059B2 (ja) |
Cited By (6)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| WO2016098224A1 (ja) * | 2014-12-18 | 2016-06-23 | 株式会社Ihi | 検査プローブ |
| WO2018135242A1 (ja) | 2017-01-19 | 2018-07-26 | 株式会社神戸製鋼所 | 検査方法 |
| CN109115876A (zh) * | 2018-08-01 | 2019-01-01 | 攀枝花天誉工程检测有限公司 | 超声波无损检测方法及装置 |
| US10365250B2 (en) | 2015-11-12 | 2019-07-30 | Kabushiki Kaisha Toshiba | Detection device, detection system, and detection method |
| US11073498B2 (en) | 2018-07-13 | 2021-07-27 | Kabushiki Kaisha Toshiba | Detection system, detection device, and detection method |
| US11385203B2 (en) | 2019-01-09 | 2022-07-12 | Kabushiki Kaisha Toshiba | Detection device, detection system, detection method, and information processing device |
Citations (10)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPS63222260A (ja) * | 1987-03-12 | 1988-09-16 | Sumitomo Metal Ind Ltd | 超音波探傷距離振幅補正装置 |
| JPH03289560A (ja) * | 1990-04-05 | 1991-12-19 | Kawasaki Steel Corp | 表面波を用いた測定における入射角の調整方法 |
| JPH1151910A (ja) * | 1997-07-30 | 1999-02-26 | Nkk Corp | 亀裂の検出及び亀裂発生部板厚の測定方法 |
| JP2000019162A (ja) * | 1998-07-06 | 2000-01-21 | Sumitomo Metal Ind Ltd | 板波超音波探傷方法 |
| JP2002243704A (ja) * | 2001-02-22 | 2002-08-28 | Osaka Gas Co Ltd | 腐食検査方法及び腐食検査装置 |
| JP2004361321A (ja) * | 2003-06-06 | 2004-12-24 | Nichizou Tec:Kk | 土中構造物の欠陥評価装置、欠陥評価方法および欠陥評価方法をコンピュータに実行させるプログラム |
| JP2005061987A (ja) * | 2003-08-12 | 2005-03-10 | Jfe Engineering Kk | 固相間界面の探傷方法 |
| JP2006038608A (ja) * | 2004-07-27 | 2006-02-09 | Tokyo Electric Power Co Inc:The | 超音波検査装置及び方法 |
| JP2007205959A (ja) * | 2006-02-03 | 2007-08-16 | Kawada Industries Inc | 超音波探傷装置用の探触子ユニット、及び、超音波探傷法によるき裂深さの推測方法 |
| JP2008014911A (ja) * | 2006-07-10 | 2008-01-24 | Mitsubishi Electric Corp | 超音波探傷装置および超音波探傷方法 |
-
2009
- 2009-05-19 JP JP2009121021A patent/JP5633059B2/ja active Active
Patent Citations (10)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPS63222260A (ja) * | 1987-03-12 | 1988-09-16 | Sumitomo Metal Ind Ltd | 超音波探傷距離振幅補正装置 |
| JPH03289560A (ja) * | 1990-04-05 | 1991-12-19 | Kawasaki Steel Corp | 表面波を用いた測定における入射角の調整方法 |
| JPH1151910A (ja) * | 1997-07-30 | 1999-02-26 | Nkk Corp | 亀裂の検出及び亀裂発生部板厚の測定方法 |
| JP2000019162A (ja) * | 1998-07-06 | 2000-01-21 | Sumitomo Metal Ind Ltd | 板波超音波探傷方法 |
| JP2002243704A (ja) * | 2001-02-22 | 2002-08-28 | Osaka Gas Co Ltd | 腐食検査方法及び腐食検査装置 |
| JP2004361321A (ja) * | 2003-06-06 | 2004-12-24 | Nichizou Tec:Kk | 土中構造物の欠陥評価装置、欠陥評価方法および欠陥評価方法をコンピュータに実行させるプログラム |
| JP2005061987A (ja) * | 2003-08-12 | 2005-03-10 | Jfe Engineering Kk | 固相間界面の探傷方法 |
| JP2006038608A (ja) * | 2004-07-27 | 2006-02-09 | Tokyo Electric Power Co Inc:The | 超音波検査装置及び方法 |
| JP2007205959A (ja) * | 2006-02-03 | 2007-08-16 | Kawada Industries Inc | 超音波探傷装置用の探触子ユニット、及び、超音波探傷法によるき裂深さの推測方法 |
| JP2008014911A (ja) * | 2006-07-10 | 2008-01-24 | Mitsubishi Electric Corp | 超音波探傷装置および超音波探傷方法 |
Cited By (11)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| WO2016098224A1 (ja) * | 2014-12-18 | 2016-06-23 | 株式会社Ihi | 検査プローブ |
| US10365151B2 (en) | 2014-12-18 | 2019-07-30 | Ihi Corporation | Inspection probe |
| US10365250B2 (en) | 2015-11-12 | 2019-07-30 | Kabushiki Kaisha Toshiba | Detection device, detection system, and detection method |
| US10955383B2 (en) | 2015-11-12 | 2021-03-23 | Kabushiki Kaisha Toshiba | Detection device, detection system, and detection method |
| US11668681B2 (en) | 2015-11-12 | 2023-06-06 | Kabushiki Kaisha Toshiba | Detection device, detection system, and detection method |
| WO2018135242A1 (ja) | 2017-01-19 | 2018-07-26 | 株式会社神戸製鋼所 | 検査方法 |
| US11054399B2 (en) | 2017-01-19 | 2021-07-06 | Kobe Steel, Ltd. | Inspection method |
| US11073498B2 (en) | 2018-07-13 | 2021-07-27 | Kabushiki Kaisha Toshiba | Detection system, detection device, and detection method |
| CN109115876A (zh) * | 2018-08-01 | 2019-01-01 | 攀枝花天誉工程检测有限公司 | 超声波无损检测方法及装置 |
| CN109115876B (zh) * | 2018-08-01 | 2020-10-16 | 攀枝花天誉工程检测有限公司 | 超声波无损检测方法及装置 |
| US11385203B2 (en) | 2019-01-09 | 2022-07-12 | Kabushiki Kaisha Toshiba | Detection device, detection system, detection method, and information processing device |
Also Published As
| Publication number | Publication date |
|---|---|
| JP5633059B2 (ja) | 2014-12-03 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP4773459B2 (ja) | 溶接構造体の欠陥検出 | |
| JP5633059B2 (ja) | 超音波探傷の感度設定方法および超音波探傷装置 | |
| Sargent | Corrosion detection in welds and heat-affected zones using ultrasonic Lamb waves | |
| CN103969341A (zh) | 奥氏体不锈钢管对接环焊缝超声波检测特种探头 | |
| JP4885631B2 (ja) | 超音波探傷装置および超音波探傷方法 | |
| JP5306919B2 (ja) | 超音波探傷法及び装置 | |
| WO2020041891A1 (en) | Continuous wave ultrasound or acoustic non-destructive testing | |
| JP5890437B2 (ja) | 超音波探傷方法および超音波探傷装置 | |
| JP6671565B2 (ja) | 超音波探傷装置 | |
| JP2002062281A (ja) | 欠陥深さ測定方法および装置 | |
| JP2004150875A (ja) | 超音波による内部欠陥の映像化方法、及び、装置 | |
| JP4793636B2 (ja) | 水浸用アレイプローブ装置 | |
| JP5456367B2 (ja) | フェーズドアレイ開口合成処理方法 | |
| JP2008261889A (ja) | 超音波による内部欠陥の映像化方法、及び、装置 | |
| JP2007263956A (ja) | 超音波探傷方法および装置 | |
| CN203758968U (zh) | 奥氏体不锈钢管对接环焊缝超声波检测特种探头 | |
| Ermolov | Progress in the theory of ultrasonic flaw detection. Problems and prospects | |
| JP6731863B2 (ja) | 検査方法 | |
| JP5022640B2 (ja) | 超音波探傷方法及び超音波探傷装置 | |
| JP2011203199A (ja) | 吸音材利用による高精度探傷方法 | |
| Chang et al. | Angle beam shear wave nondestructive testing | |
| CA3216686A1 (en) | Method and device for checking the wall of a pipeline for flaws | |
| RU2192635C2 (ru) | Способ обнаружения плоскостных несплошностей в толстостенных изделиях ультразвуковым методом | |
| JP4549512B2 (ja) | 超音波探傷装置および方法 | |
| JPH11316216A (ja) | 超音波探触子 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20120323 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A821 Effective date: 20120323 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20130531 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20131203 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20140131 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20140311 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20140421 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20140826 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20140924 |
|
| R150 | Certificate of patent or registration of utility model |
Ref document number: 5633059 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 |
|
| S533 | Written request for registration of change of name |
Free format text: JAPANESE INTERMEDIATE CODE: R313533 |
|
| R350 | Written notification of registration of transfer |
Free format text: JAPANESE INTERMEDIATE CODE: R350 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |