JP2010046889A - 記録装置 - Google Patents
記録装置 Download PDFInfo
- Publication number
- JP2010046889A JP2010046889A JP2008212559A JP2008212559A JP2010046889A JP 2010046889 A JP2010046889 A JP 2010046889A JP 2008212559 A JP2008212559 A JP 2008212559A JP 2008212559 A JP2008212559 A JP 2008212559A JP 2010046889 A JP2010046889 A JP 2010046889A
- Authority
- JP
- Japan
- Prior art keywords
- carriage
- recess
- motor
- lock member
- power transmission
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Granted
Links
- 230000005540 biological transmission Effects 0.000 claims abstract description 57
- 230000033001 locomotion Effects 0.000 claims description 23
- 238000006073 displacement reaction Methods 0.000 claims description 2
- 230000007246 mechanism Effects 0.000 abstract description 27
- 238000001514 detection method Methods 0.000 description 29
- 238000010586 diagram Methods 0.000 description 5
- 238000000034 method Methods 0.000 description 4
- 238000000926 separation method Methods 0.000 description 4
- 244000126211 Hericium coralloides Species 0.000 description 2
- 238000007599 discharging Methods 0.000 description 2
- 230000003287 optical effect Effects 0.000 description 2
- 230000003028 elevating effect Effects 0.000 description 1
- 238000012423 maintenance Methods 0.000 description 1
- 230000002265 prevention Effects 0.000 description 1
- 238000007789 sealing Methods 0.000 description 1
Images








Landscapes
- Accessory Devices And Overall Control Thereof (AREA)
- Character Spaces And Line Spaces In Printers (AREA)
Abstract
【解決手段】キャリッジ40のホームポジションには、ロックレバー47がキャリッジ40に対して進退可能に設けられ、ロックレバー47がキャリッジ40の凹部40aに嵌入することにより、キャリッジ40がホームポジションにロックされる。凹部40aに隣接する位置には、ガイド斜面40dが形成されており、これによりロックレバー47が凹部40aから外れても、キャリッジ40がホームポジションに戻る際に引っ掛かりなく凹部40aに再び嵌入することができ、結果的にキャリッジ40がホームポジションに戻ることができる。
【選択図】図7
Description
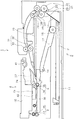
以下、図1を参照しながらプリンタ1の用紙搬送経路(全体構成)について説明する。プリンタ1は、装置底部に給送装置2を備え、当該給送装置2から記録用紙Pを1枚ずつ給送し、記録手段4においてインクジェット記録を行い、装置前方側(図1において左側)に設けられた図示しない排紙スタッカへ向けて排出する構成を備えている。
そして紙案内前39の下流側に設けられた排出手段6は、PFモータ71(図2)によって回転駆動される排出駆動ローラ44と、当該排出駆動ローラ44に接して従動回転する排出従動ローラ45とを備えて構成され、記録手段4によって記録の行われた用紙Pは、排出手段6により、装置前方側に設けられた図示を省略するスタッカへと排出される。
以上がプリンタ1の用紙搬送経路であり、以下図2〜図4を参照しながら動力伝達切換手段としての動力伝達切換装置50について詳説する。
この動力伝達切換装置50は、大略的にはキャリッジ40と係合可能に設けられ、キャリッジ40の移動動作とPFモータ70の回転動作とを利用してロック部材進退機構76を含む複数の被駆動部から一の被駆動部を選択し、当該選択した被駆動部へとPFモータ70の動力を伝達する。
以上が動力伝達切換装置50の構成及び動作であり、以下図5を参照しながらプリンタ1の制御系統について更に詳説する。上述したようにプリンタ1はCR(キャリッジ)モータ70、PF(用紙送り)モータ71、のこれら2つのモータを備えており、制御装置7は、これらモータを制御することにより、各モータを動力源とする各構成要素を駆動制御する。
続いて図6〜図9を参照しながら、キャリッジ40に形成されたガイド形状としてのガイド斜面40d、及びキャリッジ40の現在位置を把握する動作モードについて説明する。尚、図8及び図9において「CR」はキャリッジ40のことを意味する。
Claims (4)
- 被記録媒体に記録を行う記録ヘッドを備え、前記記録ヘッドの走査方向に移動可能なキャリッジと、
前記キャリッジに設けられた凹部に対し進退可能に設けられ、その先端が前記凹部に嵌入することにより前記キャリッジをロックするロック部材と、
モータから動力を受けて前記ロック部材を前記キャリッジに対して進退動作させるロック部材進退手段と、
前記キャリッジと係合可能に設けられ、前記キャリッジの移動動作を介して前記モータから前記ロック部材進退手段への動力伝達のオンオフ切り換えを行う動力伝達切換手段と、を備え、
前記キャリッジにおいて前記凹部に隣接する位置に、前記凹部から外れた前記ロック部材の先端を前記凹部に誘うガイド形状が設けられている、
ことを特徴とする記録装置。 - 請求項1に記載の記録装置において、前記動力伝達切換手段は、前記キャリッジの移動動作及び前記モータの回転動作を利用して、前記ロック部材進退手段を含む複数の被駆動部から一の被駆動部を選択し、当該選択した被駆動部へと前記モータの動力を伝達する構成を備えている、
ことを特徴とする記録装置。 - 請求項2に記載の記録装置において、前記キャリッジを第1方向に移動させながら当該キャリッジを駆動するキャリッジ駆動用モータの駆動電流値が所定値を超えるか否かを判断するステップ(1)と、前記キャリッジを前記第1方向とは逆の第2方向に移動させながら前記キャリッジ駆動用モータの駆動電流値が所定値を超えるか否かを判断するステップ(2)と、を含む動作モードであって、前記ステップ(1)と前記ステップ(2)とを実行することにより前記ロック部材が前記凹部に嵌入しているか否かを判定する動作モードを実行可能であり、
前記キャリッジの往復動領域において、前記第1方向の端部には前記キャリッジの移動可能範囲を規定するサイドフレームが設けられるとともに、前記動力伝達切換手段と前記キャリッジとが係合する係合位置が、前記ロック部材が前記凹部に嵌入する位置に対して前記サイドフレームの側に設けられており、
前記動作モードのステップ(1)において、前記キャリッジ駆動用モータの駆動電流値が所定値を超えた後、前記ステップ(2)において前記キャリッジを前記第2方向へ移動させる際の最大距離が、前記キャリッジが前記サイドフレームに当接する位置から、前記ロック部材が前記凹部に嵌入する位置まで前記キャリッジを移動させる際の距離より短く設定されている、
ことを特徴とする記録装置。 - 請求項2または3に記載の記録装置において、前記動力伝達切換手段は、前記複数の被駆動部のそれぞれが備える被伝達歯車のうち一の被伝達歯車を選択して噛合し、前記モータの動力を当該選択した被伝達歯車に伝達する伝達歯車と、
前記伝達歯車を支持する部材であって、前記キャリッジと係合可能な位置に設けられるとともに前記キャリッジの移動方向に変位可能に、且つその変位方向に平行な揺動軸を中心に揺動可能に設けられ、前記キャリッジの移動方向に変位することにより、前記伝達歯車が前記被伝達歯車と噛合する第1ポジションと、前記伝達歯車が前記被伝達歯車から離間する第2ポジションと、をとり、当該第2ポジションにおいて揺動することにより前記伝達歯車を前記複数の被伝達歯車と噛合する複数のポジションに位置決めする、可動部材と、
を備えて構成されていることを特徴とする記録装置。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2008212559A JP5273360B2 (ja) | 2008-08-21 | 2008-08-21 | 記録装置 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2008212559A JP5273360B2 (ja) | 2008-08-21 | 2008-08-21 | 記録装置 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2010046889A true JP2010046889A (ja) | 2010-03-04 |
| JP5273360B2 JP5273360B2 (ja) | 2013-08-28 |
Family
ID=42064405
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2008212559A Expired - Fee Related JP5273360B2 (ja) | 2008-08-21 | 2008-08-21 | 記録装置 |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP5273360B2 (ja) |
Cited By (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2014188851A (ja) * | 2013-03-27 | 2014-10-06 | Seiko Epson Corp | 記録装置 |
Citations (8)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH07323557A (ja) * | 1994-04-08 | 1995-12-12 | Canon Inc | 回復装置及び該回復装置を備えたインクジェット記録装置 |
| JPH1134435A (ja) * | 1997-07-18 | 1999-02-09 | Brother Ind Ltd | インクジェットプリンタにおける動力伝達装置 |
| JPH11227179A (ja) * | 1998-02-16 | 1999-08-24 | Seiko Epson Corp | インクジェットプリンタ |
| JPH11309916A (ja) * | 1998-04-27 | 1999-11-09 | Alps Electric Co Ltd | サーマルプリンタ |
| JP2000272145A (ja) * | 1999-03-25 | 2000-10-03 | Seiko Epson Corp | 記録装置 |
| JP2004276407A (ja) * | 2003-03-14 | 2004-10-07 | Seiko Epson Corp | 液体噴射装置 |
| JP2006315267A (ja) * | 2005-05-12 | 2006-11-24 | Canon Inc | インクジェット記録装置 |
| JP2006341420A (ja) * | 2005-06-08 | 2006-12-21 | Roland Dg Corp | 画像作成および切り抜き装置 |
-
2008
- 2008-08-21 JP JP2008212559A patent/JP5273360B2/ja not_active Expired - Fee Related
Patent Citations (8)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH07323557A (ja) * | 1994-04-08 | 1995-12-12 | Canon Inc | 回復装置及び該回復装置を備えたインクジェット記録装置 |
| JPH1134435A (ja) * | 1997-07-18 | 1999-02-09 | Brother Ind Ltd | インクジェットプリンタにおける動力伝達装置 |
| JPH11227179A (ja) * | 1998-02-16 | 1999-08-24 | Seiko Epson Corp | インクジェットプリンタ |
| JPH11309916A (ja) * | 1998-04-27 | 1999-11-09 | Alps Electric Co Ltd | サーマルプリンタ |
| JP2000272145A (ja) * | 1999-03-25 | 2000-10-03 | Seiko Epson Corp | 記録装置 |
| JP2004276407A (ja) * | 2003-03-14 | 2004-10-07 | Seiko Epson Corp | 液体噴射装置 |
| JP2006315267A (ja) * | 2005-05-12 | 2006-11-24 | Canon Inc | インクジェット記録装置 |
| JP2006341420A (ja) * | 2005-06-08 | 2006-12-21 | Roland Dg Corp | 画像作成および切り抜き装置 |
Cited By (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2014188851A (ja) * | 2013-03-27 | 2014-10-06 | Seiko Epson Corp | 記録装置 |
Also Published As
| Publication number | Publication date |
|---|---|
| JP5273360B2 (ja) | 2013-08-28 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP5272580B2 (ja) | 印刷装置、及び、印刷方法 | |
| JP5196144B2 (ja) | 動力伝達切換装置、記録装置 | |
| JP5773801B2 (ja) | インクジェット記録装置および該記録装置の制御方法 | |
| JP5322406B2 (ja) | 記録装置 | |
| JP5418255B2 (ja) | シート材搬送装置及び記録装置 | |
| JP5273360B2 (ja) | 記録装置 | |
| JP2007216670A (ja) | 記録装置、記録制御プログラムおよび記録方法 | |
| JP6892631B2 (ja) | 媒体処理装置 | |
| JP2009298060A (ja) | 記録装置および電子機器 | |
| JP7563048B2 (ja) | 記録装置 | |
| JP4645799B2 (ja) | キャリッジ駆動装置、該キャリッジ駆動装置を備えた液体噴射装置 | |
| JP2017007140A (ja) | 搬送装置及びインクジェット記録装置 | |
| JP5136785B2 (ja) | 歯車装置、およびこれを備えた記録装置 | |
| JP2009279889A (ja) | 記録装置 | |
| JP4895015B2 (ja) | 被記録媒体給送装置、記録装置、液体噴射装置 | |
| JP4692790B2 (ja) | キャリッジ駆動装置、該キャリッジ駆動装置を備えた液体噴射装置 | |
| JP4835848B2 (ja) | 被記録媒体給送装置、記録装置、液体噴射装置 | |
| JP5692282B2 (ja) | 印刷装置、及び、印刷方法 | |
| JP5013049B2 (ja) | 動力伝達切換装置、記録装置 | |
| JP5668921B2 (ja) | プリンタドライバ、記録装置 | |
| JP4332723B2 (ja) | 記録装置及び液体噴射装置 | |
| JP2004249476A (ja) | 記録装置、液体噴射装置 | |
| JP2007001071A (ja) | ギャップ検出装置、記録装置、プログラム、液体噴射装置 | |
| JP3965581B2 (ja) | 自動給紙装置、該自動給紙装置を備えた記録装置 | |
| JP2010018017A (ja) | 記録装置 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20110819 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20130130 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20130130 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20130328 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20130417 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20130430 |
|
| R150 | Certificate of patent or registration of utility model |
Free format text: JAPANESE INTERMEDIATE CODE: R150 Ref document number: 5273360 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 |
|
| S531 | Written request for registration of change of domicile |
Free format text: JAPANESE INTERMEDIATE CODE: R313531 |
|
| R350 | Written notification of registration of transfer |
Free format text: JAPANESE INTERMEDIATE CODE: R350 |
|
| LAPS | Cancellation because of no payment of annual fees |