JP2010046486A - 歯科用放射線装置とその利用法 - Google Patents
歯科用放射線装置とその利用法 Download PDFInfo
- Publication number
- JP2010046486A JP2010046486A JP2009193280A JP2009193280A JP2010046486A JP 2010046486 A JP2010046486 A JP 2010046486A JP 2009193280 A JP2009193280 A JP 2009193280A JP 2009193280 A JP2009193280 A JP 2009193280A JP 2010046486 A JP2010046486 A JP 2010046486A
- Authority
- JP
- Japan
- Prior art keywords
- sensor
- ray generator
- axis
- slit
- ray
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Granted
Links
- 230000005855 radiation Effects 0.000 claims description 24
- 238000000034 method Methods 0.000 claims description 22
- 239000011159 matrix material Substances 0.000 claims description 16
- 238000003325 tomography Methods 0.000 claims description 12
- 210000002455 dental arch Anatomy 0.000 description 27
- 210000001847 jaw Anatomy 0.000 description 16
- 238000003384 imaging method Methods 0.000 description 15
- 230000007246 mechanism Effects 0.000 description 11
- 239000007787 solid Substances 0.000 description 11
- 230000008859 change Effects 0.000 description 8
- 238000001514 detection method Methods 0.000 description 5
- 230000006870 function Effects 0.000 description 5
- 230000008901 benefit Effects 0.000 description 3
- 238000003745 diagnosis Methods 0.000 description 3
- 238000010586 diagram Methods 0.000 description 3
- 230000001678 irradiating effect Effects 0.000 description 3
- 230000009471 action Effects 0.000 description 2
- 210000000988 bone and bone Anatomy 0.000 description 2
- 230000010354 integration Effects 0.000 description 2
- 239000002184 metal Substances 0.000 description 2
- 238000012545 processing Methods 0.000 description 2
- 230000011218 segmentation Effects 0.000 description 2
- 230000003213 activating effect Effects 0.000 description 1
- 210000003484 anatomy Anatomy 0.000 description 1
- 230000002238 attenuated effect Effects 0.000 description 1
- 230000000694 effects Effects 0.000 description 1
- 238000009499 grossing Methods 0.000 description 1
- 210000004283 incisor Anatomy 0.000 description 1
- 230000013011 mating Effects 0.000 description 1
- 230000004048 modification Effects 0.000 description 1
- 238000012986 modification Methods 0.000 description 1
- 230000008569 process Effects 0.000 description 1
- 238000002601 radiography Methods 0.000 description 1
- 230000009467 reduction Effects 0.000 description 1
- 238000010187 selection method Methods 0.000 description 1
- 238000012546 transfer Methods 0.000 description 1
- 230000007704 transition Effects 0.000 description 1
- 238000013519 translation Methods 0.000 description 1
Images






Classifications
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B6/00—Apparatus or devices for radiation diagnosis; Apparatus or devices for radiation diagnosis combined with radiation therapy equipment
- A61B6/50—Apparatus or devices for radiation diagnosis; Apparatus or devices for radiation diagnosis combined with radiation therapy equipment specially adapted for specific body parts; specially adapted for specific clinical applications
- A61B6/51—Apparatus or devices for radiation diagnosis; Apparatus or devices for radiation diagnosis combined with radiation therapy equipment specially adapted for specific body parts; specially adapted for specific clinical applications for dentistry
Landscapes
- Health & Medical Sciences (AREA)
- Life Sciences & Earth Sciences (AREA)
- Medical Informatics (AREA)
- Engineering & Computer Science (AREA)
- Optics & Photonics (AREA)
- Biomedical Technology (AREA)
- Biophysics (AREA)
- High Energy & Nuclear Physics (AREA)
- Oral & Maxillofacial Surgery (AREA)
- Nuclear Medicine, Radiotherapy & Molecular Imaging (AREA)
- Dentistry (AREA)
- Pathology (AREA)
- Radiology & Medical Imaging (AREA)
- Physics & Mathematics (AREA)
- Heart & Thoracic Surgery (AREA)
- Molecular Biology (AREA)
- Surgery (AREA)
- Animal Behavior & Ethology (AREA)
- General Health & Medical Sciences (AREA)
- Public Health (AREA)
- Veterinary Medicine (AREA)
- Apparatus For Radiation Diagnosis (AREA)
Abstract
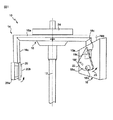
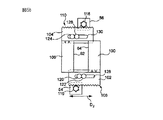
【解決手段】X線発生装置(18)とその正面でX線を受光するセンサー(20)を具備し、これらの組立体を所定面内の所定の軌跡に沿って移動させパノラマ画像を生成するに適したものであり、X線発生装置は面に垂直な軸に沿って延伸するコリメーション用スリット(18e、18f)を備え、第1の動作モードでこの軸に沿って延伸するX線ビームを発生しセンサーは画素マトリックスを備えビームに対応して軸に沿って延伸する。センサーを90°軸回転させて面に平行に延伸するようにする手段と、X線発生装置を第1の動作モードからセンサーの方向に平行に延伸するX線ビームを発生させる第2の動作モードに移行させ、センサーを常にビームと対応させる手段(22)とを備える。
【選択図】図1
Description
センサーを90°軸回転させて面Pに平行な方向に延伸するようにする手段と、
少なくとも1つのコリメーション用スリットを備えるX線発生装置を第1の動作モードから第2の動作モードに移行させ、その第2の動作モードにおいて、センサーの方向に平行に延伸するX線ビームを発生させることで、このように配置されたセンサーがそのビームと常に対応しているようにする手段と、
を備える歯科用放射線装置を提案する。
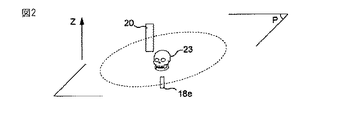
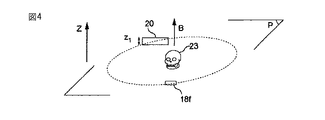
第2の動作モードにあるX線発生装置と、面Pに平行に配置されたセンサーとで構成される組立体を、軸Zに平行な固定軸のまわりを回転駆動させる手段と、
その回転運動の間にX線発生装置−センサーの組立体が取る複数の角度位置について、コリメートされたX線を照射された対象物の複数の画像信号を取得する手段と、
取得した画像信号の集合をもとにして、照射された対象物の立体表示を得る手段と、
このようにして得られた立体表示をもとにして、その対象物のパノラマ画像をのちに生成させるときにX線発生装置−センサーの組立体がたどらねばならない軌跡を特定する手段とを備えている。
− センサーを90°軸回転させて面Pに平行な方向に延伸するようにするステップと、
− 少なくとも1つのコリメーション用スリットを備えるX線発生装置を第1の動作モードから第2の動作モードに移行させ、その第2の動作モードにおいて、センサーの方向に平行に延伸するX線ビームを発生させることで、このように配置されたセンサーがそのビームと常に対応しているようにするステップをあらかじめ含むことを特徴とする方法も目的とする。
第2の動作モードにあるX線発生装置と、面Pに平行に配置されたセンサーとで構成される組立体を、軸Zに平行な固定軸のまわりを回転駆動させるステップと、
その回転運動の間にX線発生装置−センサーの組立体が取る複数の角度位置について、コリメートされたX線を照射された対象物の複数の画像信号を取得するステップと、
取得した画像信号の集合をもとにして、照射された対象物の立体表示を得るステップと、
このようにして得られた立体表示をもとにして、その対象物のパノラマ画像をのちに生成させるときにX線発生装置−センサーの組立体がたどらねばならない軌跡を特定するステップと、
を含んでいる。
センサーを90°軸回転させてそのセンサーを軸Zに平行な位置に戻すステップと、
少なくとも1つのコリメーション用スリットを有するX線発生装置を第2の動作モードから第1の動作モードに移行させるステップと、
少なくとも1つのコリメーション用スリットを有するX線発生装置と、軸Zに平行に配置されたスリットとで構成される組立体を、あらかじめ特定された軌跡に沿って移動させる命令を、軸Zに平行な軸のまわりの回転運動と組み合わせるステップと、
命令されたこの移動をセンサーの画素のシフトと組み合わせてパノラマ画像を取得するステップとを、
含んでいる。
Claims (14)
- 歯科用放射線装置(10)であって、
X線発生装置(18)と、その正面にあってそのX線発生装置から出るX線を受光するセンサー(20)とを備えていて、そのX線発生装置とそのセンサーで構成される組立体をある面(P)内の所定の軌跡に沿って移動させることによって対象物のパノラマ画像を生成させることができるもので、
X線発生装置は、面(P)に垂直な軸(Z)に沿って延伸する少なくとも1つのコリメーション用スリット(18e、18f)を備えていて、
第1の動作モードにおいて、この軸に沿って延伸するX線ビームを発生させ、
センサーは画素マトリックスを備えていて、このビームに対応して軸(Z)に沿って延伸する構成にされているものにおいて、
センサーを90°軸回転させて面(P)に平行な方向に延伸するようにする手段と、
少なくとも1つのコリメーション用スリット(18e、18f)を備えるX線発生装置を第1の動作モードから第2の動作モードに移行させ、その第2の動作モードにおいて、センサーの方向に平行に延伸するX線ビームを発生させることで、このように配置されたセンサーがそのビームと常に対応しているようにする手段(22)とを備える、
ことを特徴とする歯科用放射線装置。 - 第2の動作モードにあるX線発生装置と、面(P)に平行に配置されたセンサーとで構成される組立体を、軸(Z)に平行な固定軸のまわりを回転駆動させる手段(49)と、
その回転運動の間にX線発生装置−センサーの組立体が取る複数の角度位置について、コリメートされたX線を照射された対象物の複数の画像信号を取得する手段と、
取得した画像信号の集合をもとにして、照射された対象物の立体表示を得る手段と、
このようにして得られた立体表示をもとにして、その対象物のパノラマ画像をのちに生成させるときにX線発生装置−センサーの組立体がたどらねばならない軌跡を特定する手段と、を備える、
ことを特徴とする請求項1に記載の歯科用放射線装置。 - 複数の画像信号を取得する手段が、センサーの画素マトリックスによって捕集されたデータを読み取る手段を備えていて、
その読み取り手段が、所定数の画素に従って画素をグループ化する手段を備えているため、このようにグループ化された画素が読み取られる、
ことを特徴とする請求項2に記載の歯科用放射線装置。 - 得られた立体表示をもとにして軌跡を特定する手段が、この立体表示を構成するデータを閾値化またはセグメント化する手段を備える、
ことを特徴とする、請求項2または3に記載の歯科用放射線装置。 - X線発生装置(18)が単一のコリメーション用スリットを備えているため、そのX線発生装置とそのスリットを90°軸回転させることによって面(P)に平行な方向に沿って延伸するX線ビームを生成させることができる、
ことを特徴とする請求項1から4のいずれか1項に記載の歯科用放射線装置。 - X線発生装置が、互いに垂直な方向に沿って延伸する2つのコリメーション用スリット(18e、18f)を備えているため、それぞれが、命令によりそのX線発生装置の前を次々に通過し、軸(Z)に沿って延伸するX線ビームと、その軸(Z)に垂直な軸に沿って延伸するX線ビームをそれぞれ生成させることができる、
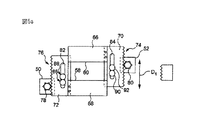
ことを特徴とする請求項1から4のいずれか1項に記載の歯科用放射線装置。 - X線発生装置(18)が単一のコリメーション用スリットを備えていて、この歯科用放射線装置が、そのスリットの互いに垂直な方向に沿った長さを調節する手段(74、76、78、80、108、110、116、118)を備えている、
ことを特徴とする請求項1から4のいずれか1項に記載の歯科用放射線装置。 - 調節手段が、それぞれの方向に独立であることを特徴とする、請求項7に記載の歯科用放射線装置。
- コリメーション用スリットが4つの辺(58、60、62、64)によって区画されていて、調節手段がその各辺を互いに独立に移動させることができることを特徴とする、請求項7または8に記載の歯科用放射線装置。
- 歯科用放射線装置をもとにして、対象物のパノラマ画像を生成させる方法であって、
歯科用放射線装置が、
X線発生装置(18)と、その正面にあってそのX線発生装置から出るX線を受光するセンサー(20)とを備えていて、
そのX線発生装置は、面(P)に垂直な軸(Z)に沿って延伸する少なくとも1つのコリメーション用スリット(18e、18f)を備えていて、第1の動作モードにおいて、この軸に沿って延伸するX線ビームを発生させ、センサーは画素マトリックスを備えていて、このビームに対応して軸(Z)に沿って延伸する構成にされていて、
この方法が、
その対象物のパノラマ画像を生成させるためにX線発生装置−センサーの組立体が面(P)内をたどる軌跡を得るため、この歯科用放射線装置をコーン・ビーム断層撮影モードで動作させることを目的として、
センサーを90°軸回転させて面(P)に平行な方向に延伸するようにするステップ(S1)と、
少なくとも1つのコリメーション用スリット(18e、18f)を備えるX線発生装置を第1の動作モードから第2の動作モードに移行させ、その第2の動作モードにおいて、センサーの方向に平行に延伸するX線ビームを発生させることで、このように配置されたセンサーがそのビームと常に対応しているようにするステップ(S2)と、
をあらかじめ含む、
ことを特徴とする方法。 - 第2の動作モードにあるX線発生装置と、面(P)に平行に配置されたセンサーとで構成される組立体を、軸(Z)に平行な固定軸のまわりを回転駆動させるステップと、
その回転運動の間にX線発生装置−センサーの組立体が取る複数の角度位置について、コリメートされたX線を照射された対象物の複数の画像信号を取得するステップ(S3)と、
取得した画像信号の集合をもとにして、照射された対象物の立体表示を得るステップ(S4)と、
このようにして得られた立体表示をもとにして、その対象物のパノラマ画像をのちに生成させるときにX線発生装置−センサーの組立体がたどらねばならない軌跡を特定するステップ(S6)と、を含む、
ことを特徴とする請求項10に記載の方法。 - 複数の画像信号を取得するステップが、センサーの画素マトリックスによって捕集されたデータを読み取るステップを含んでいて、その読み取りステップが、所定数の画素に従って画素をグループ化する操作を含んでいるため、このようにグループ化された画素が読み取られる、
ことを特徴とする請求項11に記載の方法。 - 得られた立体表示をもとにして軌跡を特定するステップが、この立体表示を構成するデータを閾値化またはセグメント化するステップ(S5)を含む、
ことを特徴とする請求項11または12に記載の方法。 - センサーを90°軸回転させてそのセンサーを軸(Z)に平行な位置に戻すステップ(S8)と、
少なくとも1つのコリメーション用スリットを有するX線発生装置を第2の動作モードから第1の動作モードに移行させるステップと、
少なくとも1つのコリメーション用スリットを有するX線発生装置と、軸(Z)に平行に配置されたスリットとで構成される組立体を、あらかじめ特定された軌跡に沿って移動させる命令を、軸(Z)に平行な軸のまわりの回転運動と組み合わせるステップと、
命令されたこの移動をセンサーの画素のシフトと組み合わせてパノラマ画像を取得するステップと、を含む、
ことを特徴とする請求項11から13のいずれか1項に記載の方法。
Applications Claiming Priority (2)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| FR0855685A FR2938183B1 (fr) | 2008-08-22 | 2008-08-22 | Appareil de radiologie dentaire panoramique et procede d'utilisation associe |
| FR0855685 | 2008-08-22 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2010046486A true JP2010046486A (ja) | 2010-03-04 |
| JP5547443B2 JP5547443B2 (ja) | 2014-07-16 |
Family
ID=40419086
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2009193280A Expired - Fee Related JP5547443B2 (ja) | 2008-08-22 | 2009-08-24 | 歯科用放射線装置とその利用法 |
Country Status (5)
| Country | Link |
|---|---|
| US (1) | US8503604B2 (ja) |
| EP (1) | EP2156792B1 (ja) |
| JP (1) | JP5547443B2 (ja) |
| KR (1) | KR101642987B1 (ja) |
| FR (1) | FR2938183B1 (ja) |
Cited By (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2012065779A (ja) * | 2010-09-22 | 2012-04-05 | Asahi Roentgen Kogyo Kk | 医療用x線撮影装置 |
| JP2013116318A (ja) * | 2011-11-02 | 2013-06-13 | Morita Mfg Co Ltd | パノラマx線断層撮影装置および画像処理装置 |
| JP2015516825A (ja) * | 2012-03-12 | 2015-06-18 | ジェノレイ カンパニー、リミテッド | X線撮影装置 |
| WO2016018002A1 (ko) * | 2014-07-28 | 2016-02-04 | 주식회사바텍 | 엑스선 영상 촬영장치 및 엑스선 영상 촬영방법 |
| JP2018532482A (ja) * | 2015-10-09 | 2018-11-08 | コーニンクレッカ フィリップス エヌ ヴェKoninklijke Philips N.V. | 血管内デバイスのための操縦デバイスのための進化した制御機能並びに関連するシステム及び方法 |
Families Citing this family (16)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN103458793B (zh) * | 2010-12-22 | 2018-08-03 | 特罗菲公司 | 数字检测器 |
| FR2982759B1 (fr) | 2011-11-17 | 2013-11-29 | Trophy | Appareil de radiologie dentaire panoramique |
| FR2992877B1 (fr) * | 2012-07-06 | 2015-07-03 | Phenix Systems | Procede de pilotage de faisceau laser pour fabrication d'objets tridimensionnels par couches superposees. |
| WO2014037770A1 (en) * | 2012-09-07 | 2014-03-13 | Trophy | Apparatus for partial ct imaging |
| KR20150088679A (ko) * | 2014-01-24 | 2015-08-03 | 주식회사바텍 | Ct 촬영 장치 |
| US9408581B2 (en) | 2014-03-07 | 2016-08-09 | Elwha Llc | Systems, devices, and methods for lowering dental x-ray dosage including feedback sensors |
| CN103908288B (zh) * | 2014-03-21 | 2016-03-02 | 北京工业大学 | 沿真实牙弓轨迹扫描的数字化牙科曲面断层全景x光机 |
| US9888891B2 (en) | 2014-06-26 | 2018-02-13 | Palodex Group Oy | X-ray imaging unit for medical imaging |
| CN105741239B (zh) * | 2014-12-11 | 2018-11-30 | 合肥美亚光电技术股份有限公司 | 牙齿全景图像的生成方法、装置及用于拍摄牙齿的全景机 |
| EP3272291B1 (en) * | 2015-03-18 | 2021-01-27 | Vatech Co., Ltd. | Device and method for reconstructing medical image |
| US10049467B2 (en) * | 2015-03-18 | 2018-08-14 | Vatech Co., Ltd. | Apparatus and method for reconstructing medical image |
| ITUA20162102A1 (it) * | 2016-03-30 | 2017-09-30 | Cefla S C | Dispositivo di limitazione del fascio per apparecchiature radiografiche |
| JP6837400B2 (ja) * | 2017-08-23 | 2021-03-03 | 株式会社モリタ製作所 | X線撮影装置及びx線撮影方法 |
| US11341609B2 (en) * | 2017-09-28 | 2022-05-24 | 3Shape A/S | Method and system for generating a panoramic image |
| KR102026716B1 (ko) | 2017-11-15 | 2019-09-30 | 주식회사 에스엠디솔루션 | 엑스선 영상 촬영장치 및 이를 사용한 촬영방법 |
| KR102026715B1 (ko) | 2017-11-15 | 2019-09-30 | 주식회사 에스엠디솔루션 | 케이블 정렬장치, 상기 케이블 정렬장치를 포함하는 엑스선 영상 촬영장치 및 상기 엑스선 영상 촬영장치를 사용한 촬영방법 |
Citations (7)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH09122118A (ja) * | 1995-11-06 | 1997-05-13 | Morita Mfg Co Ltd | 医療用x線断層撮影装置 |
| US6224373B1 (en) * | 1999-03-15 | 2001-05-01 | Samsung Sds Co., Ltd. | Simulation method for visualizing density of jawbone for dental implantation |
| JP2003175031A (ja) * | 2001-10-02 | 2003-06-24 | Morita Mfg Co Ltd | デジタルx線パノラマ撮影装置 |
| WO2007046372A1 (ja) * | 2005-10-17 | 2007-04-26 | J. Morita Manufacturing Corporation | 医療用デジタルx線撮影装置及び医療用デジタルx線センサ |
| JP2007156706A (ja) * | 2005-12-02 | 2007-06-21 | Fujitsu Ltd | 歯科治療を支援するシミュレーション方法 |
| JP2007159635A (ja) * | 2005-12-09 | 2007-06-28 | Hitachi Medical Corp | X線計測装置、x線計測方法およびx線計測プログラム |
| JP2007330687A (ja) * | 2006-06-19 | 2007-12-27 | Hitachi Medical Corp | パノラマ断層像生成装置及びパノラマ断層像生成プログラム |
Family Cites Families (22)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| EP0340349B1 (en) * | 1988-05-06 | 1998-10-21 | Dentsply Research & Development Corp. | Dental X-ray apparatus for panoramic tomography |
| JP3291406B2 (ja) * | 1995-02-09 | 2002-06-10 | 株式会社モリタ製作所 | パノラマx線撮影装置 |
| JP3319905B2 (ja) * | 1995-03-24 | 2002-09-03 | 株式会社モリタ製作所 | デジタルx線撮影装置 |
| US7136452B2 (en) * | 1995-05-31 | 2006-11-14 | Goldpower Limited | Radiation imaging system, device and method for scan imaging |
| JP3807833B2 (ja) * | 1996-12-10 | 2006-08-09 | 株式会社モリタ製作所 | X線撮影装置 |
| JP3743594B2 (ja) * | 1998-03-11 | 2006-02-08 | 株式会社モリタ製作所 | Ct撮影装置 |
| JP3919048B2 (ja) * | 1998-09-02 | 2007-05-23 | 株式会社モリタ製作所 | 局所照射x線ct撮影装置 |
| WO2000057789A1 (fr) * | 1999-03-25 | 2000-10-05 | Nihon University | Appareil et procede d'imagerie obtenue par tomographie informatisee (ct) aux rayons x, par rayonnement local |
| JP2001284210A (ja) * | 2000-03-30 | 2001-10-12 | Canon Inc | 露光装置、デバイス製造方法、半導体製造工場および露光装置の保守方法 |
| JP3926120B2 (ja) * | 2001-02-16 | 2007-06-06 | 株式会社モリタ製作所 | 被写体のx線撮影位置設定手段、この手段を備えたx線撮影装置 |
| WO2003084407A1 (fr) * | 2002-04-11 | 2003-10-16 | J. Morita Manufacturing Corporation | Equipement de tomodensitometrie |
| JP2006061501A (ja) * | 2004-08-27 | 2006-03-09 | Morita Mfg Co Ltd | X線撮影装置 |
| FI118413B (fi) * | 2005-04-11 | 2007-11-15 | Planmeca Oy | Tietokonetomografialaitteisto |
| JP4488948B2 (ja) * | 2005-04-11 | 2010-06-23 | 株式会社モリタ製作所 | X線ct撮影用ユニットおよびx線撮影装置 |
| US7336763B2 (en) * | 2005-05-02 | 2008-02-26 | Oy Ajat Ltd | Dental extra-oral x-ray imaging system and method |
| KR100707796B1 (ko) * | 2005-08-08 | 2007-04-13 | 주식회사바텍 | 파노라마 및 씨티 겸용 엑스선 촬영장치 |
| KR100794563B1 (ko) * | 2005-08-08 | 2008-01-17 | 주식회사바텍 | 파노라마 및 씨티 겸용 엑스선 촬영장치 |
| EP1815794B1 (en) * | 2006-02-01 | 2015-11-04 | Gendex Corporation | Dental x-ray apparatus and method of positioning a patient therein |
| WO2008092009A2 (en) * | 2007-01-24 | 2008-07-31 | Imaging Sciences International Llc | Adjustable scanner |
| JP2008229322A (ja) * | 2007-02-22 | 2008-10-02 | Morita Mfg Co Ltd | 画像処理方法、画像表示方法、画像処理プログラム、記憶媒体、画像処理装置、x線撮影装置 |
| US7715526B2 (en) * | 2008-03-13 | 2010-05-11 | Oy Ajat Limited | Single sensor multi-functional dental extra-oral x-ray imaging system and method |
| FR2938182B1 (fr) * | 2008-08-22 | 2010-11-19 | Trophy | Appareil de radiologie dentaire et procede d'utilisation associe |
-
2008
- 2008-08-22 FR FR0855685A patent/FR2938183B1/fr not_active Expired - Fee Related
-
2009
- 2009-08-21 EP EP09168422A patent/EP2156792B1/en not_active Not-in-force
- 2009-08-21 KR KR1020090077861A patent/KR101642987B1/ko not_active Expired - Fee Related
- 2009-08-24 US US12/546,137 patent/US8503604B2/en not_active Expired - Fee Related
- 2009-08-24 JP JP2009193280A patent/JP5547443B2/ja not_active Expired - Fee Related
Patent Citations (7)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH09122118A (ja) * | 1995-11-06 | 1997-05-13 | Morita Mfg Co Ltd | 医療用x線断層撮影装置 |
| US6224373B1 (en) * | 1999-03-15 | 2001-05-01 | Samsung Sds Co., Ltd. | Simulation method for visualizing density of jawbone for dental implantation |
| JP2003175031A (ja) * | 2001-10-02 | 2003-06-24 | Morita Mfg Co Ltd | デジタルx線パノラマ撮影装置 |
| WO2007046372A1 (ja) * | 2005-10-17 | 2007-04-26 | J. Morita Manufacturing Corporation | 医療用デジタルx線撮影装置及び医療用デジタルx線センサ |
| JP2007156706A (ja) * | 2005-12-02 | 2007-06-21 | Fujitsu Ltd | 歯科治療を支援するシミュレーション方法 |
| JP2007159635A (ja) * | 2005-12-09 | 2007-06-28 | Hitachi Medical Corp | X線計測装置、x線計測方法およびx線計測プログラム |
| JP2007330687A (ja) * | 2006-06-19 | 2007-12-27 | Hitachi Medical Corp | パノラマ断層像生成装置及びパノラマ断層像生成プログラム |
Cited By (6)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2012065779A (ja) * | 2010-09-22 | 2012-04-05 | Asahi Roentgen Kogyo Kk | 医療用x線撮影装置 |
| JP2013116318A (ja) * | 2011-11-02 | 2013-06-13 | Morita Mfg Co Ltd | パノラマx線断層撮影装置および画像処理装置 |
| JP2015516825A (ja) * | 2012-03-12 | 2015-06-18 | ジェノレイ カンパニー、リミテッド | X線撮影装置 |
| WO2016018002A1 (ko) * | 2014-07-28 | 2016-02-04 | 주식회사바텍 | 엑스선 영상 촬영장치 및 엑스선 영상 촬영방법 |
| US10405815B2 (en) | 2014-07-28 | 2019-09-10 | Vatech Co., Ltd. | X-ray imaging device |
| JP2018532482A (ja) * | 2015-10-09 | 2018-11-08 | コーニンクレッカ フィリップス エヌ ヴェKoninklijke Philips N.V. | 血管内デバイスのための操縦デバイスのための進化した制御機能並びに関連するシステム及び方法 |
Also Published As
| Publication number | Publication date |
|---|---|
| US20100074403A1 (en) | 2010-03-25 |
| US8503604B2 (en) | 2013-08-06 |
| EP2156792B1 (en) | 2013-03-13 |
| FR2938183A1 (fr) | 2010-05-14 |
| FR2938183B1 (fr) | 2011-12-09 |
| KR20100023785A (ko) | 2010-03-04 |
| JP5547443B2 (ja) | 2014-07-16 |
| KR101642987B1 (ko) | 2016-07-26 |
| EP2156792A1 (en) | 2010-02-24 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP5547443B2 (ja) | 歯科用放射線装置とその利用法 | |
| JP5519974B2 (ja) | 歯科用放射線装置とその利用法 | |
| US7676022B2 (en) | Extra-oral digital panoramic dental x-ray imaging system | |
| CN108463170B (zh) | X光图像显示设备和x光图像显示方法 | |
| JP5123702B2 (ja) | 放射線ct装置 | |
| US10687768B2 (en) | X-ray image forming device | |
| KR20130018896A (ko) | 방사선 촬상 장치 및 동장치에 이용하는 팬텀 | |
| EP3845130B1 (en) | Dental imaging with photon-counting detector | |
| JP6040502B2 (ja) | 歯科用x線撮影装置 | |
| US9066687B2 (en) | Panoramic dental x-ray unit | |
| JP2019536605A (ja) | 複数のx線画像から2d画像を再構築する方法 | |
| KR101941019B1 (ko) | 엑스선 촬영 장치 및 방법 | |
| JP2007151849A (ja) | X線ct撮影方法およびx線ct装置 | |
| KR20200037998A (ko) | 파노라마 영상 생성 방법, 파노라마 영상 생성 장치 및 컴퓨터 판독 가능한 기록 매체 | |
| KR20170105756A (ko) | 3차원 광차 엑스선 ct 촬영장치 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20120217 |
|
| RD03 | Notification of appointment of power of attorney |
Free format text: JAPANESE INTERMEDIATE CODE: A7423 Effective date: 20130307 |
|
| RD04 | Notification of resignation of power of attorney |
Free format text: JAPANESE INTERMEDIATE CODE: A7424 Effective date: 20130307 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20130425 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20130501 |
|
| A601 | Written request for extension of time |
Free format text: JAPANESE INTERMEDIATE CODE: A601 Effective date: 20130801 |
|
| A602 | Written permission of extension of time |
Free format text: JAPANESE INTERMEDIATE CODE: A602 Effective date: 20130806 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20131101 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20131211 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20140311 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20140421 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20140515 |
|
| R150 | Certificate of patent or registration of utility model |
Ref document number: 5547443 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| LAPS | Cancellation because of no payment of annual fees |