JP2010032469A - 道路情報案内装置、道路情報案内方法及びコンピュータプログラム - Google Patents
道路情報案内装置、道路情報案内方法及びコンピュータプログラム Download PDFInfo
- Publication number
- JP2010032469A JP2010032469A JP2008197632A JP2008197632A JP2010032469A JP 2010032469 A JP2010032469 A JP 2010032469A JP 2008197632 A JP2008197632 A JP 2008197632A JP 2008197632 A JP2008197632 A JP 2008197632A JP 2010032469 A JP2010032469 A JP 2010032469A
- Authority
- JP
- Japan
- Prior art keywords
- vehicle
- roundabout
- road
- guidance
- map information
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Granted
Links
Images






Landscapes
- Instructional Devices (AREA)
- Navigation (AREA)
- Traffic Control Systems (AREA)
Abstract
【解決手段】自車が環状交差点に進入したと判定された場合に、自車の現在走行するリンクを進入リンクとして記憶し(S8)、その後、自車が環状交差点から退出することなく進入リンクへと再度進入した場合に、車両が環状交差点の案内を必要としていると判定し、環状交差点の方面案内を開始する(S6)ように構成する。
【選択図】図4
Description
現在位置検出部11は、GPS21、地磁気センサ22、車速センサ23、ステアリングセンサ24、ジャイロセンサ25、高度計(図示せず)等からなり、現在の自車の位置、方位、自車の走行速度等を検出することが可能となっている。ここで、特に車速センサ23は、車両の移動距離や車速を検出する為のセンサであり、車両の車輪の回転に応じてパルスを発生させ、パルス信号をナビゲーションECU13に出力する。そして、ナビゲーションECU13は発生するパルスを計数することにより車輪の回転速度や移動距離を算出する。尚、上記5種類のセンサをナビゲーション装置1が全て備える必要はなく、これらの内の1又は複数種類のセンサのみをナビゲーション装置1が備える構成としても良い。
また、地図データは、具体的には、道路(リンク)形状に関するリンクデータ33、ノード点に関するノードデータ34、各交差点に関する交差点データ35、施設に関する施設データ、経路を探索するための探索データ、地点を検索するための検索データ、地図、道路、交通情報等の画像を液晶ディスプレイ15に描画するための画像描画データ等から構成されている。
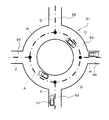
そして、車両57が環状交差点を走行する場合には、車両57は進入退出路53〜56のいずれかから環状交差点51へと進入する。その後、環状交差点51に進入した車両57は環状道路52を走行し、進入退出路53〜56の内、目的の方面に対応する進入退出路から環状交差点51を退出する。
具体的には、案内標識素材データは図3に示すように、環状交差点の形状及び環状交差点での進入退出路の方向を示す画像が記憶された交差点画像データ61と、環状交差点で案内する方面に関する文字(具体的には、その方面にある地名や施設名)が記憶された方面文字データ62によって構成されている。また、交差点画像データ61に記憶された画像データ及び方面文字データ62に記憶された文字データは、地図情報DB31に記憶された一又は複数の環状交差点にそれぞれ関連付けられている。
先ず、自車が進入した環状交差点に関連する画像データや文字データを案内標識素材データから抽出する。具体的には、先ず自車の進入した環状交差点の種類(例えば、環状道路の形状、進入退出路の数など)を地図情報DB31の交差点データから特定し、環状交差点の種類に応じた環状交差点の形状及び環状交差点での進入退出路の方向を示す画像を交差点画像データ61から抽出する。また、自車の進入した環状交差点に対して予め関連付けられた文字データを方面文字データ62から抽出する(図3参照)。
次に、抽出された文字データ及び画像データと現在の自車方位を用いて方面案内標識を作成する。具体的には、抽出された交差点画像データ61を、自車が環状交差点に進入した道路が下方に位置するように、或いは、北側が上方となるように画像の向きを調整する。その後、調整された画像向きに対応させて方面文字データ62を配置する。
図5に示すように、液晶ディスプレイ15には自車周辺の地図画像とともに、環状交差点に接続された進入退出路に対応する方面を案内する方面案内標識71が表示される。例えば、図5に示す方面案内標識71では、自車の現在走行する環状交差点が、4方向に進入退出路が接続された環状交差点であることを示す概略道路図72と、それぞれの進入退出路の先にある市区町村を示す文字73と、自車の現在位置を概略道路図72上に示す自車位置マーク74とから構成されている。
そして、ユーザは方面案内標識71を参照することによって、自車の右方にある進入退出路から環状交差点を退出すると、『豊田』へと向かうことを容易に把握することが可能となる。
また、ユーザは方面案内標識71を参照することによって、自車の前方にある進入退出路から環状交差点を退出すると、『岐阜』へと向かうことを容易に把握することが可能となる。
また、ユーザは方面案内標識71を参照することによって、自車の左方にある進入退出路から環状交差点を退出すると、『四日市』へと向かうことを容易に把握することが可能となる。
更に、ユーザは方面案内標識71を参照することによって、自車の後方にある進入退出路から環状交差点を退出すると、『安城』へと向かうことを容易に把握することが可能となる。尚、前記S6で開始された方面案内処理は、自車が環状交差点を走行中でないと判定される(S13)まで継続して行われる。また、上記S6が方面案内手段の処理に相当する。
1.図6に示すように、先ず車両が環状交差点に接続する進入退出路から環状交差点に進入した場合には、車両が現在位置する現在地リンクが進入リンクとして記憶される。
2.その後、リンク間を移動する毎に、現在地リンクを車両の走行履歴として記憶しつつ、環状交差点を周回したか否かの判定を行う。
3.環状交差点から退出することなく進入リンクへと再度進入した場合、即ち、環状交差点に進入したと判定された後の車両の全走行履歴が環状交差点を走行する履歴であって、且つ現在地リンクと進入リンクとが一致する場合に、車両が環状交差点を周回したと判定し、図5に示す環状交差点の方面案内を開始する。
4.その後、リンク間を移動する毎に、車両が環状交差点を退出したか否か判定し、環状交差点から退出するまでは環状交差点の方面案内を継続して行う。
5.そして、車両が環状交差点を退出した場合に環状交差点の方面案内を終了する。
また、自車が環状交差点から退出することなく進入道路へと再度進入した場合に、車両が道に迷って環状交差点を周回しており、ユーザが環状交差点の案内を必要としていると判定するので、環状交差点の走行履歴からユーザが環状交差点の案内を必要とするタイミングを正確に判定することが可能となる。
例えば、図4に示した方面案内処理プログラムを以下のように構成することも可能である。図7は他の実施形態に係る方面案内処理プログラムのフローチャートである。ここで、図7に示す方面案内処理プログラムは車両のイグニションがONされた後に所定時間間隔(例えば200msec)で実行される。
13 ナビゲーションECU
31 地図情報DB
32 走行履歴DB
41 CPU
42 RAM
43 ROM
Claims (5)
- 車両の走行履歴を取得する走行履歴取得手段と、
環状交差点に関する情報を含む地図情報を取得する地図情報取得手段と、
前記走行履歴と前記地図情報に基づいて、前記車両が前記環状交差点を退出することなく周回したか否か判定する周回判定手段と、
前記周回判定手段によって前記車両が前記環状交差点を退出することなく周回したと判定された場合に、前記環状交差点から退出する退出路に対応する方面を案内する方面案内手段と、を有することを特徴とする道路情報案内装置。 - 前記車両の現在位置を取得する現在位置取得手段と、
前記車両の現在位置と前記地図情報に基づいて、前記車両が前記環状交差点に進入したか否か判定する進入判定手段と、を有し、
前記走行履歴取得手段は、前記進入判定手段によって前記車両が前記環状交差点に進入したと判定されたときに、前記車両が現在位置する道路を進入道路として記憶し、
前記周回判定手段は、前記車両が前記進入道路へと再度進入した場合に、前記車両が前記環状交差点を退出することなく周回したと判定することを特徴とする請求項1に記載の道路情報案内装置。 - 前記車両の現在位置を取得する現在位置取得手段と、
前記車両の現在位置と前記車両の走行履歴に基づいて、前記車両が過去に走行した道路と同一の道路を走行しているか否か判定する走行道路判定手段と、
前記車両の現在位置と前記地図情報に基づいて、前記車両が前記環状交差点に位置するか否か判定する現在位置判定手段と、を有し、
前記周回判定手段は、
前記車両が過去に走行した道路と同一の道路を走行するとともに前記車両の現在位置が環状交差点に位置する場合であって、且つ前記車両が過去に該道路を走行した後から現在までの前記車両の全走行履歴が前記環状交差点を走行する履歴である場合に、前記車両が前記環状交差点を退出することなく周回したと判定することを特徴とする請求項1に記載の道路情報案内装置。 - 車両の走行履歴を取得する走行履歴取得ステップと、
環状交差点に関する情報を含む地図情報を取得する地図情報取得ステップと、
前記走行履歴と前記地図情報に基づいて、前記車両が前記環状交差点を退出することなく周回したか否か判定する周回判定ステップと、
前記周回判定ステップにおいて前記車両が前記環状交差点を退出することなく周回したと判定された場合に、前記環状交差点から退出する退出路に対応する方面を案内する方面案内ステップと、を有することを特徴とする道路情報案内方法。 - コンピュータに搭載され、
車両の走行履歴を取得する走行履歴取得機能と、
環状交差点に関する情報を含む地図情報を取得する地図情報取得機能と、
前記走行履歴と前記地図情報に基づいて、前記車両が前記環状交差点を退出することなく周回したか否か判定する周回判定機能と、
前記周回判定機能において前記車両が前記環状交差点を退出することなく周回したと判定された場合に、前記環状交差点から退出する退出路に対応する方面を案内する方面案内機能と、
を実行させることを特徴とするコンピュータプログラム。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2008197632A JP5051046B2 (ja) | 2008-07-31 | 2008-07-31 | 道路情報案内装置、道路情報案内方法及びコンピュータプログラム |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2008197632A JP5051046B2 (ja) | 2008-07-31 | 2008-07-31 | 道路情報案内装置、道路情報案内方法及びコンピュータプログラム |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2010032469A true JP2010032469A (ja) | 2010-02-12 |
| JP5051046B2 JP5051046B2 (ja) | 2012-10-17 |
Family
ID=41737106
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2008197632A Expired - Fee Related JP5051046B2 (ja) | 2008-07-31 | 2008-07-31 | 道路情報案内装置、道路情報案内方法及びコンピュータプログラム |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP5051046B2 (ja) |
Cited By (11)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2012159350A (ja) * | 2011-01-31 | 2012-08-23 | Denso Corp | ナビゲーション装置 |
| JP2013092458A (ja) * | 2011-10-26 | 2013-05-16 | Denso Corp | ナビゲーション装置 |
| JP2013096744A (ja) * | 2011-10-28 | 2013-05-20 | Alpine Electronics Inc | ナビゲーション装置 |
| JP2016180667A (ja) * | 2015-03-24 | 2016-10-13 | パイオニア株式会社 | ナビゲーション装置 |
| CN108369102A (zh) * | 2015-12-11 | 2018-08-03 | C.R.F.财团股份公司 | 协助机动车驾驶员绕过环岛 |
| JP2019008341A (ja) * | 2017-06-20 | 2019-01-17 | 日産自動車株式会社 | 走行判断方法及び走行判断装置 |
| JP2019194626A (ja) * | 2019-08-01 | 2019-11-07 | パイオニア株式会社 | ナビゲーション装置 |
| CN110770544A (zh) * | 2017-06-26 | 2020-02-07 | 日产自动车株式会社 | 方向指示器控制方法及方向指示器控制装置 |
| CN110799805A (zh) * | 2017-06-26 | 2020-02-14 | 日产自动车株式会社 | 方向指示器控制方法及方向指示器控制装置 |
| CN112400096A (zh) * | 2018-07-11 | 2021-02-23 | 日产自动车株式会社 | 行驶辅助方法和行驶辅助装置 |
| CN115235494A (zh) * | 2022-07-19 | 2022-10-25 | 南京四维智联科技有限公司 | 环岛路段引导方法、装置、设备及存储介质 |
Citations (9)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH06307884A (ja) * | 1993-04-27 | 1994-11-04 | Sumitomo Electric Ind Ltd | 経路誘導装置 |
| JPH10122881A (ja) * | 1996-10-23 | 1998-05-15 | Toyota Motor Corp | 走行情報提供装置 |
| JP2001317956A (ja) * | 2000-05-10 | 2001-11-16 | Denso Corp | ナビゲーション装置及び記録媒体 |
| JP2003269979A (ja) * | 2002-03-19 | 2003-09-25 | Pioneer Electronic Corp | 経路案内装置及び経路案内方法 |
| JP2004117268A (ja) * | 2002-09-27 | 2004-04-15 | Denso Corp | 地図表示装置 |
| JP2006023127A (ja) * | 2004-07-06 | 2006-01-26 | Nissan Motor Co Ltd | ナビゲーション装置と関心地点情報提示方法 |
| JP2006145288A (ja) * | 2004-11-17 | 2006-06-08 | Denso Corp | 周回走行事前検出装置および周回走行事前検出プログラム |
| JP2008045925A (ja) * | 2006-08-11 | 2008-02-28 | Xanavi Informatics Corp | 地図表示装置、情報センタおよび方面看板表示システム |
| JP2008116262A (ja) * | 2006-11-01 | 2008-05-22 | Alpine Electronics Inc | 車載用ナビゲーション装置及びラウンドアバウトの表示方法 |
-
2008
- 2008-07-31 JP JP2008197632A patent/JP5051046B2/ja not_active Expired - Fee Related
Patent Citations (9)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH06307884A (ja) * | 1993-04-27 | 1994-11-04 | Sumitomo Electric Ind Ltd | 経路誘導装置 |
| JPH10122881A (ja) * | 1996-10-23 | 1998-05-15 | Toyota Motor Corp | 走行情報提供装置 |
| JP2001317956A (ja) * | 2000-05-10 | 2001-11-16 | Denso Corp | ナビゲーション装置及び記録媒体 |
| JP2003269979A (ja) * | 2002-03-19 | 2003-09-25 | Pioneer Electronic Corp | 経路案内装置及び経路案内方法 |
| JP2004117268A (ja) * | 2002-09-27 | 2004-04-15 | Denso Corp | 地図表示装置 |
| JP2006023127A (ja) * | 2004-07-06 | 2006-01-26 | Nissan Motor Co Ltd | ナビゲーション装置と関心地点情報提示方法 |
| JP2006145288A (ja) * | 2004-11-17 | 2006-06-08 | Denso Corp | 周回走行事前検出装置および周回走行事前検出プログラム |
| JP2008045925A (ja) * | 2006-08-11 | 2008-02-28 | Xanavi Informatics Corp | 地図表示装置、情報センタおよび方面看板表示システム |
| JP2008116262A (ja) * | 2006-11-01 | 2008-05-22 | Alpine Electronics Inc | 車載用ナビゲーション装置及びラウンドアバウトの表示方法 |
Cited By (15)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2012159350A (ja) * | 2011-01-31 | 2012-08-23 | Denso Corp | ナビゲーション装置 |
| JP2013092458A (ja) * | 2011-10-26 | 2013-05-16 | Denso Corp | ナビゲーション装置 |
| JP2013096744A (ja) * | 2011-10-28 | 2013-05-20 | Alpine Electronics Inc | ナビゲーション装置 |
| JP2016180667A (ja) * | 2015-03-24 | 2016-10-13 | パイオニア株式会社 | ナビゲーション装置 |
| CN108369102A (zh) * | 2015-12-11 | 2018-08-03 | C.R.F.财团股份公司 | 协助机动车驾驶员绕过环岛 |
| CN108369102B (zh) * | 2015-12-11 | 2022-06-14 | C.R.F.财团股份公司 | 协助机动车驾驶员绕过环岛 |
| JP2019008341A (ja) * | 2017-06-20 | 2019-01-17 | 日産自動車株式会社 | 走行判断方法及び走行判断装置 |
| CN110770544A (zh) * | 2017-06-26 | 2020-02-07 | 日产自动车株式会社 | 方向指示器控制方法及方向指示器控制装置 |
| CN110799805A (zh) * | 2017-06-26 | 2020-02-14 | 日产自动车株式会社 | 方向指示器控制方法及方向指示器控制装置 |
| CN112400096A (zh) * | 2018-07-11 | 2021-02-23 | 日产自动车株式会社 | 行驶辅助方法和行驶辅助装置 |
| CN112400096B (zh) * | 2018-07-11 | 2024-05-03 | 日产自动车株式会社 | 行驶辅助方法和行驶辅助装置 |
| JP2021165751A (ja) * | 2019-08-01 | 2021-10-14 | パイオニア株式会社 | ナビゲーション装置 |
| JP2019194626A (ja) * | 2019-08-01 | 2019-11-07 | パイオニア株式会社 | ナビゲーション装置 |
| JP2023067958A (ja) * | 2019-08-01 | 2023-05-16 | パイオニア株式会社 | ナビゲーション装置 |
| CN115235494A (zh) * | 2022-07-19 | 2022-10-25 | 南京四维智联科技有限公司 | 环岛路段引导方法、装置、设备及存储介质 |
Also Published As
| Publication number | Publication date |
|---|---|
| JP5051046B2 (ja) | 2012-10-17 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP5051046B2 (ja) | 道路情報案内装置、道路情報案内方法及びコンピュータプログラム | |
| JP4722433B2 (ja) | 車載用ナビゲーション装置 | |
| JP5565296B2 (ja) | 経路案内装置、経路案内方法及びコンピュータプログラム | |
| EP2453207A2 (en) | Travel guidance device, travel guidance method, and computer program | |
| JP2002333336A (ja) | 車載用ナビゲーション装置 | |
| JP5874225B2 (ja) | 移動案内システム、移動案内装置、移動案内方法及びコンピュータプログラム | |
| EP2612112B1 (en) | Travel guidance system, travel guidance apparatus, travel guidance method and computer program | |
| JP2012189343A (ja) | 運転支援装置、運転支援方法及びコンピュータプログラム | |
| JP4245817B2 (ja) | 車載用ナビゲーション装置 | |
| JP5353744B2 (ja) | 車両用走行案内装置、車両用走行案内方法及びコンピュータプログラム | |
| JP4905346B2 (ja) | ナビゲーション装置及び走行案内方法 | |
| JP6075208B2 (ja) | ナビゲーション装置 | |
| JP4635376B2 (ja) | ナビゲーション装置及びナビゲーションプログラム | |
| JP4697160B2 (ja) | 交通情報案内装置 | |
| JP2008116262A (ja) | 車載用ナビゲーション装置及びラウンドアバウトの表示方法 | |
| JP2006266803A (ja) | ナビゲーション装置 | |
| JP2011209119A (ja) | 経路案内装置、経路案内方法及びコンピュータプログラム | |
| JP7245041B2 (ja) | 移動案内装置及びコンピュータプログラム | |
| JP5010333B2 (ja) | 走行案内装置、走行案内方法及びコンピュータプログラム | |
| JP2009085738A (ja) | 走行案内装置、走行案内方法及びコンピュータプログラム | |
| JP2008249463A (ja) | ナビゲーション装置及びプログラム | |
| JP5083105B2 (ja) | 道路情報案内装置、道路情報案内方法及びコンピュータプログラム | |
| JP5786523B2 (ja) | 移動案内システム、移動案内装置、移動案内方法及びコンピュータプログラム | |
| JP2013029378A (ja) | 移動案内システム、移動案内装置、移動案内方法及びコンピュータプログラム | |
| JP5831016B2 (ja) | 移動案内システム、移動案内装置、移動案内方法及びコンピュータプログラム |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20110128 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20120418 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20120424 |
|
| A521 | Written amendment |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20120608 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20120626 |
|
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20120709 |
|
| R150 | Certificate of patent or registration of utility model |
Free format text: JAPANESE INTERMEDIATE CODE: R150 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20150803 Year of fee payment: 3 |
|
| LAPS | Cancellation because of no payment of annual fees |