JP2010005732A - ロボットハンド機構、ロボットハンド機構を備えたロボット及びロボットハンド機構の制御方法 - Google Patents
ロボットハンド機構、ロボットハンド機構を備えたロボット及びロボットハンド機構の制御方法 Download PDFInfo
- Publication number
- JP2010005732A JP2010005732A JP2008167481A JP2008167481A JP2010005732A JP 2010005732 A JP2010005732 A JP 2010005732A JP 2008167481 A JP2008167481 A JP 2008167481A JP 2008167481 A JP2008167481 A JP 2008167481A JP 2010005732 A JP2010005732 A JP 2010005732A
- Authority
- JP
- Japan
- Prior art keywords
- force
- robot hand
- gripping
- hand mechanism
- hardness
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Granted
Links
Images












Landscapes
- Manipulator (AREA)
Abstract
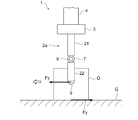
【解決手段】ロボットハンド機構1は1対の指部2a及び2bを備えている。指部2a及び2bの第一節21には、サーボモータ7を介して第二節22が変位可能に連結されている。サーボモータ7にはポテンショメータ8が取り付けられており、第二節22の先端部には力覚センサ9が設けられている。ポテンショメータ8は、第二節22の変位量を制御部6に出力する。力覚センサ9は、第二節22が対象物Oに加える押圧力Fx及び第二節22と対象物Oとの間に生じる摩擦力Fyを制御部6に出力する。制御部6は、ポテンショメータ8及び力覚センサ9からの入力に基づいて対象物Oの硬さを判定し、硬さに基づいて、対象物Oを把持する把持力と対象物Oを移動させる速度とを切り替える。
【選択図】図1
Description
実施の形態1.
図1に、この実施の形態1に係るロボットハンド機構1を用いたロボットの要部を示す。
尚、ロボットハンド機構1が位置する三次元空間の直交座標系を、図1に示すX軸、Y軸及びZ軸によって規定する。X軸は水平な載置面Gに対して平行に延びる水平軸であり、Y軸はX軸に対して垂直をなす鉛直軸である。Z軸はX軸及びY軸に対して垂直をなす水平軸であって、図1の奥行方向に沿って延びている。また、把持及び移動の対象である対象物Oは、載置面G上に配置されている。ここで、対象物Oは、その硬さ、材質、形状や大きさ等が不特定となっている。
まず、制御部6から対象物移動指示が出力される(ステップS1)。制御部6からの対象物移動指示を受け取った駆動装置5はアーム4を駆動して、ロボットハンド機構1を対象物Oの位置まで移動させる(ステップS2)。図4(a)に、ロボットハンド機構1が対象物Oの位置まで移動した様子を示す。ステップS2の終了時点において、指部2aの第二節22と指部2bの第二節22とは変位を開始しておらず、これらの間に対象物Oが配置され、且つ互いに接触していない状態となっている。
Fy=mg×1/2・・・(1)
摩擦力Fyが上記(1)式の条件を満たした時点において、第二節22が対象物Oに加えていた押圧力Fxが、対象物Oを把持するのに要する最小の把持力となる。
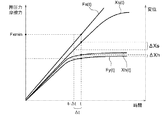
Fy(t)−Fy(t−Δt)<Fth・・・(2)
(2)式において、Fy(t)は、第二節22と対象物Oとが接触した時点から時間t経過した時点における摩擦力Fyを表す。また、Fthは予め決められて、制御部6に記憶されている閾値である。
X(t)−X(t−Δt)>Xf・・・(3)
ここで、(3)式のXfは、予め決められて、制御部6に記憶されている閾値である。第二節22の変位量X(t)が(3)式の条件を満たし、対象物Oが柔らかいと判定されると、制御部6はサーボモータ7に把持動作終了指示を出力する(ステップS8)。把持動作終了指示を受け取ったサーボモータ7は、対象物Oに加える押圧力Fxを増大させるのを終了し、以後、ステップS6で取得した最小把持力Fxminで対象物Oを把持し続けるように第二節22を駆動する。一方、第二節22の変位量X(t)が(3)式の条件を満たさず、対象物Oが硬いと判定された場合、制御部6は、後述するステップS11に処理を移す。尚、制御部6は、第二節22と対象物Oとの間に生じている摩擦力Fyと、単位時間Δt間に置ける第二節22の変位量とを直接的に検知しているため、対象物Oの硬さ、材質、形状や大きさ等が不特定であっても、その硬さを判定することができる。
Fx(t)>α×Fxmin(ただしα>1)・・・(4)
(4)式において、αは予め決められて制御部6に記憶されている所定の係数であり、Fx(t)が(4)式の条件を満たすことにより、対象物Oが最小把持力Fxminより大きい第二の把持力で把持される。
次に、この発明の実施の形態2に係るロボットハンド機構について説明する。この実施の形態2に係るロボットハンド機構は、実施の形態1におけるロボットハンド機構に対し、対象物が硬いと判定された場合の制御方法を変更したものである。尚、以下の実施の形態において、図1〜6の参照符号と同一の符号は同一または同様の構成であるので、その詳細な説明は省略する。
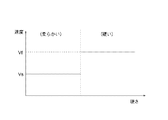
図7に、この実施の形態2に係るロボットハンド機構における把持力及び移動速度の設定を示す。尚、図7は、対象物Oの硬さを横軸で示すとともに、一方の縦軸に対象物Oに加えられる把持力Fxを示し、他方の縦軸に対象物Oの移動速度Vを示したものである。図7に示されるように、対象物Oが柔らかいと判定された場合は、実施の形態1と同様、対象物Oを最小把持力Fxminで把持するとともに低速移動用速度Vsで移動させる。
次に、この発明の実施の形態3に係るロボットハンド機構について説明する。この実施の形態3に係るロボットハンド機構は、実施の形態1におけるロボットハンド機構の動作が制御部によって切り替えられていたのに対し、使用者が動作を選択可能であるように構成したものである。
ロボットハンド機構1の制御部6(図1参照)には、図8(a)〜(c)に示す安静移動モード、二段階移動モード及び高速移動モードが予め記憶されており、これらの動作モードに従って、ロボットハンド機構1が動作するようになっている。また、これらの動作モードは、例えば制御部に電気的に接続された図示しない操作部等を操作することにより、ロボットハンド機構1の操作者が選択可能となっている。
図8(b)に示す二段階移動モードは、実施の形態1におけるロボットハンド機構1の制御方法と同様であり、対象物Oの硬さに応じて、把持力及び移動速度を二段階に切り替えるものである。また、図8(c)に示す高速移動モードは、実施の形態2におけるロボットハンド機構1の制御方法と同様であり、対象物Oが硬いと判定された場合に、その硬さに応じて把持力及び移動速度を変化させ、対象物Oが硬ければ硬いほど高速で移動させるようにしたものである。その他の構成については実施の形態1と同様である。
次に、この発明の実施の形態4に係るロボットハンド機構について説明する。この実施の形態4に係るロボットハンド機構は、実施の形態1におけるロボットハンド機構に対して、対象物の硬さを判定する処理の順番を変更したものである。
図9に、この実施の形態4に係るロボットハンド機構の動作を示すフローチャートを示す。図13において、ステップS21〜ステップS26については、実施の形態1におけるステップS1〜ステップS6(図3参照)とそれぞれ同様であるため、その説明は省略する。
次に、この発明の実施の形態5に係るロボットハンド機構について説明する。この実施の形態5に係るロボットハンド機構は、実施の形態1に係るロボットハンド機構におけるサーボモータの代わりに超音波モータを用いて構成したものである。
図10に示すように、ロボットハンド機構31の基部3の底部には、1対の超音波モータ41a及び41bが取り付けられており、超音波モータ41a及び41bには、指部32がそれぞれ連結されている。超音波モータ41a及び42bは同一の構成を有しており、指部32の先端部には、実施の形態1と同様の力覚センサ9が設けられている。
Fy=mg×1/2
として説明したが、所定値以上の加速度aで対象物を持ち上げる場合、上式を、
Fy=m(g+a)×1/2
として、対象物を持ち上げる加速度aを加味した制御を行なうことも可能である。
Claims (8)
- 変位可能に設けられる複数の指部を備え、前記複数の指部を変位させて対象物を把持するとともに、把持した前記対象物を移動させるロボットハンド機構において、
前記指部の変位量を検知する変位量検知部と、
前記指部に設けられ、前記指部と前記対象物との間に作用する力のうち、少なくとも、前記指部が前記対象物に加える押圧力、及び前記指部と前記対象物との間に生じる摩擦力を検知する力覚センサと、
前記対象物の把持及び移動を制御する制御部と
をさらに備え、
前記制御部は、
前記力覚センサが検知した前記押圧力及び前記摩擦力に基づいて、前記対象物を把持するのに要する最小の把持力を取得するとともに、
前記最小の把持力を取得する際に、前記変位量検知部が検知した前記指部の変位量に基づいて、前記対象物の硬さを判定し、
判定した前記硬さに基づいて、前記対象物を把持する把持力と、把持した前記対象物を移動させる速度とを変化させることを特徴とするロボットハンド機構。 - 前記制御部は、
前記対象物を、前記最小の把持力に基づく第一の把持力で把持するとともに第一の速度で移動させる第一の設定と、
前記対象物を、前記第一の把持力より大きい第二の把持力で把持するとともに前記第一の速度より高速な第二の速度で移動させる第二の設定と
を、前記対象物の前記硬さに基づいて切り替えるロボットハンド機構。 - 前記第二の把持力及び前記第二の速度は、前記対象物の前記硬さに応じて変化する請求項1または2に記載のロボットハンド機構。
- 前記対象物の前記硬さに関わらず、前記第一の設定で前記対象物を移動させる安静移動モード、
前記対象物の前記硬さに基づいて、前記第一の設定と前記第二の設定とを切り替えて前記対象物を移動させ、前記第二の把持力及び前記第二の速度は、前記対象物の前記硬さに関わらず一定である二段階移動モード、及び
前記対象物の前記硬さに基づいて、前記第一の設定と前記第二の設定とを切り替えて前記対象物を移動させ、前記第二の把持力及び前記第二の速度は、前記対象物の前記硬さに応じて変化する高速移動モード
のいずれかを選択可能であって、
前記制御部は、前記安静移動モード、前記二段階移動モード及び前記高速移動モードのうちの、選択されたいずれかに基づいて前記対象物の前記把持及び前記移動を制御する請求項1〜3のいずれか1項に記載のロボットハンド機構。 - 前記制御部は、前記対象物の前記移動を開始した後に、前記対象物の前記硬さを判定する請求項1〜4のいずれか1項に記載のロボットハンド機構。
- 前記指部は、圧電素子を振動体として用いる超音波モータによって駆動されて変位する請求項1〜5のいずれか1項に記載のロボットハンド機構。
- 請求項1〜6のいずれか1項に記載のロボットハンド機構を備えたロボット。
- 変位可能に設けられる複数の指部を備え、前記複数の指部を変位させて対象物を把持するとともに、把持した前記対象物を移動させるロボットハンド機構の制御方法において、
前記指部が前記対象物に加える押圧力と、前記指部と前記対象物との間に生じる摩擦力とを検知し、
検知した前記押圧力及び前記摩擦力に基づいて、前記対象物を把持するのに要する最小の把持力を取得し、
前記最小の把持力を取得する際に、前記指部の変位量を検知し、
検知した前記指部の前記変位量に基づいて、前記対象物の硬さを判定し、
判定した前記硬さに基づいて、前記対象物を把持する把持力と、把持した前記対象物を移動させる速度とを変化させることを特徴とするロボットハンド機構の制御方法。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2008167481A JP5045577B2 (ja) | 2008-06-26 | 2008-06-26 | ロボットハンド機構、ロボットハンド機構を備えたロボット及びロボットハンド機構の制御方法 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2008167481A JP5045577B2 (ja) | 2008-06-26 | 2008-06-26 | ロボットハンド機構、ロボットハンド機構を備えたロボット及びロボットハンド機構の制御方法 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2010005732A true JP2010005732A (ja) | 2010-01-14 |
| JP5045577B2 JP5045577B2 (ja) | 2012-10-10 |
Family
ID=41586793
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2008167481A Expired - Fee Related JP5045577B2 (ja) | 2008-06-26 | 2008-06-26 | ロボットハンド機構、ロボットハンド機構を備えたロボット及びロボットハンド機構の制御方法 |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP5045577B2 (ja) |
Cited By (13)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2011230263A (ja) * | 2010-04-30 | 2011-11-17 | Seiko Epson Corp | 把持ロボットおよび把持方法 |
| JP2013085378A (ja) * | 2011-10-11 | 2013-05-09 | Seiko Epson Corp | モーター制御装置、ロボットハンド、ロボット及びモーター制御方法 |
| JP2013163237A (ja) * | 2012-02-10 | 2013-08-22 | Seiko Epson Corp | モーター制御装置、ロボットハンド、ロボット及びモーター制御方法 |
| DE102013018329A1 (de) | 2012-11-07 | 2014-05-08 | Fanuc Corporation | Roboterhand zur Behandlung eines Werkstücks in einem Hochtemperaturbereich |
| JP2014128869A (ja) * | 2012-12-27 | 2014-07-10 | Hyundai Motor Company Co Ltd | ロボットグリッパー及びその制御方法 |
| CN107225576A (zh) * | 2017-07-31 | 2017-10-03 | 哈工大机器人集团有限公司 | 一种基于软性手指的控制方法 |
| WO2017173697A1 (zh) * | 2016-04-09 | 2017-10-12 | 深圳市兼明科技有限公司 | 基于导电海绵的机器人手指的控制方法 |
| WO2019059403A1 (ja) * | 2017-09-25 | 2019-03-28 | 学校法人慶應義塾 | 食品移載システム及び食品把持装置 |
| JP2019104101A (ja) * | 2017-12-13 | 2019-06-27 | 上銀科技股▲分▼有限公司 | 電動グリッパの適応制御方法、及び電動グリッパ |
| CN114029974A (zh) * | 2021-11-04 | 2022-02-11 | 上海擎朗智能科技有限公司 | 一种机器人送餐控制方法、装置、机器人及存储介质 |
| WO2023127652A1 (ja) * | 2021-12-27 | 2023-07-06 | ミネベアミツミ株式会社 | 把持装置及び把持装置の制御方法 |
| CN116766212A (zh) * | 2023-08-17 | 2023-09-19 | 深圳市心流科技有限公司 | 一种仿生手控制方法、装置、设备及存储介质 |
| JP7553117B2 (ja) | 2019-10-04 | 2024-09-18 | 国立大学法人 香川大学 | 把持システム、滑り検知装置、滑り検知プログラム、および滑り検知方法 |
Citations (6)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH07186083A (ja) * | 1993-12-28 | 1995-07-25 | Honda Motor Co Ltd | ロボットハンドの把持制御方法 |
| JPH08323678A (ja) * | 1995-05-25 | 1996-12-10 | Sanyo Electric Co Ltd | 柔軟物体把持装置 |
| JP2001096484A (ja) * | 1999-09-29 | 2001-04-10 | Aloka Co Ltd | 試験管搬送装置 |
| JP2001219390A (ja) * | 2000-02-03 | 2001-08-14 | Nikon Corp | 搬送装置 |
| JP2005144573A (ja) * | 2003-11-12 | 2005-06-09 | Toyota Motor Corp | ロボットハンドの把持力制御方法 |
| JP2008100317A (ja) * | 2006-10-19 | 2008-05-01 | Toyota Industries Corp | 物体ハンドリング装置 |
-
2008
- 2008-06-26 JP JP2008167481A patent/JP5045577B2/ja not_active Expired - Fee Related
Patent Citations (6)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH07186083A (ja) * | 1993-12-28 | 1995-07-25 | Honda Motor Co Ltd | ロボットハンドの把持制御方法 |
| JPH08323678A (ja) * | 1995-05-25 | 1996-12-10 | Sanyo Electric Co Ltd | 柔軟物体把持装置 |
| JP2001096484A (ja) * | 1999-09-29 | 2001-04-10 | Aloka Co Ltd | 試験管搬送装置 |
| JP2001219390A (ja) * | 2000-02-03 | 2001-08-14 | Nikon Corp | 搬送装置 |
| JP2005144573A (ja) * | 2003-11-12 | 2005-06-09 | Toyota Motor Corp | ロボットハンドの把持力制御方法 |
| JP2008100317A (ja) * | 2006-10-19 | 2008-05-01 | Toyota Industries Corp | 物体ハンドリング装置 |
Cited By (21)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2011230263A (ja) * | 2010-04-30 | 2011-11-17 | Seiko Epson Corp | 把持ロボットおよび把持方法 |
| JP2013085378A (ja) * | 2011-10-11 | 2013-05-09 | Seiko Epson Corp | モーター制御装置、ロボットハンド、ロボット及びモーター制御方法 |
| CN103107767A (zh) * | 2011-10-11 | 2013-05-15 | 精工爱普生株式会社 | 电机控制装置、机械手、机器人以及电机控制方法 |
| US9461569B2 (en) | 2011-10-11 | 2016-10-04 | Seiko Epson Corporation | Motor control device, robot hand, robot, and motor control method |
| JP2013163237A (ja) * | 2012-02-10 | 2013-08-22 | Seiko Epson Corp | モーター制御装置、ロボットハンド、ロボット及びモーター制御方法 |
| DE102013018329B4 (de) | 2012-11-07 | 2022-05-19 | Fanuc Corporation | Roboterhand zur Behandlung eines Werkstücks in einem Hochtemperaturbereich |
| DE102013018329A1 (de) | 2012-11-07 | 2014-05-08 | Fanuc Corporation | Roboterhand zur Behandlung eines Werkstücks in einem Hochtemperaturbereich |
| US8979151B2 (en) | 2012-11-07 | 2015-03-17 | Fanuc Corporation | Robot hand for handling workpiece in high temperature area |
| JP2014128869A (ja) * | 2012-12-27 | 2014-07-10 | Hyundai Motor Company Co Ltd | ロボットグリッパー及びその制御方法 |
| WO2017173697A1 (zh) * | 2016-04-09 | 2017-10-12 | 深圳市兼明科技有限公司 | 基于导电海绵的机器人手指的控制方法 |
| CN107225576B (zh) * | 2017-07-31 | 2019-07-19 | 哈工大机器人集团股份有限公司 | 一种基于软性手指的控制方法 |
| CN107225576A (zh) * | 2017-07-31 | 2017-10-03 | 哈工大机器人集团有限公司 | 一种基于软性手指的控制方法 |
| WO2019059403A1 (ja) * | 2017-09-25 | 2019-03-28 | 学校法人慶應義塾 | 食品移載システム及び食品把持装置 |
| JP2019058967A (ja) * | 2017-09-25 | 2019-04-18 | 学校法人慶應義塾 | 食品移載システム及び食品把持装置 |
| JP7201313B2 (ja) | 2017-09-25 | 2023-01-10 | 慶應義塾 | 食品移載システム及び食品把持装置 |
| JP2019104101A (ja) * | 2017-12-13 | 2019-06-27 | 上銀科技股▲分▼有限公司 | 電動グリッパの適応制御方法、及び電動グリッパ |
| JP7553117B2 (ja) | 2019-10-04 | 2024-09-18 | 国立大学法人 香川大学 | 把持システム、滑り検知装置、滑り検知プログラム、および滑り検知方法 |
| CN114029974A (zh) * | 2021-11-04 | 2022-02-11 | 上海擎朗智能科技有限公司 | 一种机器人送餐控制方法、装置、机器人及存储介质 |
| WO2023127652A1 (ja) * | 2021-12-27 | 2023-07-06 | ミネベアミツミ株式会社 | 把持装置及び把持装置の制御方法 |
| CN116766212A (zh) * | 2023-08-17 | 2023-09-19 | 深圳市心流科技有限公司 | 一种仿生手控制方法、装置、设备及存储介质 |
| CN116766212B (zh) * | 2023-08-17 | 2023-12-19 | 深圳市心流科技有限公司 | 一种仿生手控制方法、装置、设备及存储介质 |
Also Published As
| Publication number | Publication date |
|---|---|
| JP5045577B2 (ja) | 2012-10-10 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP5045577B2 (ja) | ロボットハンド機構、ロボットハンド機構を備えたロボット及びロボットハンド機構の制御方法 | |
| CN101801616B (zh) | 动力辅助装置及其控制方法 | |
| JP4562782B2 (ja) | グリッパー及びその駆動方法 | |
| JP5105147B2 (ja) | ロボットおよび制御方法 | |
| Driesen et al. | Micro manipulation by adhesion with two collaborating mobile micro robots | |
| CN108527413B (zh) | 一种压电驱动柔顺灵巧手 | |
| Kortschack et al. | Development of mobile versatile nanohandling microrobots: design, driving principles, haptic control | |
| JP2013099807A (ja) | ロボット及びロボットの制御方法 | |
| JP2016087749A (ja) | ロボットハンド | |
| JP2006321015A (ja) | ロボットハンド装置 | |
| JP5760748B2 (ja) | 圧電アクチュエーターの駆動方法、及び、駆動ユニット | |
| JP4702299B2 (ja) | ロボットハンド | |
| JP4888375B2 (ja) | ロボットハンド | |
| JP6322948B2 (ja) | ロボット制御装置、ロボットシステム、ロボット、ロボット制御方法、及びプログラム | |
| Kim et al. | A precision robot system with modular actuators and MEMS micro gripper for micro system assembly | |
| JP7178994B2 (ja) | 把持システム | |
| JP4998244B2 (ja) | 振動アクチュエータ及びその制御方法ならびにロボットハンド | |
| WO2018139071A1 (ja) | チャック装置、及びチャック方法 | |
| JP2014117071A (ja) | ロボット | |
| JP2020110907A (ja) | ロボットシステム及びロボットシステムの制御方法 | |
| Nguyen et al. | Locomotion of a miniature robot based on synchronized vibrating actuation mechanisms | |
| Kanayama et al. | Micromanipulator utilizing a bending and expanding motion actuator | |
| JP2017148913A (ja) | ロボット、制御装置及びロボットの制御方法 | |
| JP6342875B2 (ja) | 入力装置及び入力方法 | |
| Yako et al. | Vertical Vibratory Transport of Grasped Parts Using Impacts |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20100628 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20120126 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20120221 |
|
| A521 | Written amendment |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20120419 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20120619 |
|
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20120702 |
|
| FPAY | Renewal fee payment (prs date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20150727 Year of fee payment: 3 |
|
| LAPS | Cancellation because of no payment of annual fees |