JP2010003728A - 表面実装装置 - Google Patents
表面実装装置 Download PDFInfo
- Publication number
- JP2010003728A JP2010003728A JP2008158943A JP2008158943A JP2010003728A JP 2010003728 A JP2010003728 A JP 2010003728A JP 2008158943 A JP2008158943 A JP 2008158943A JP 2008158943 A JP2008158943 A JP 2008158943A JP 2010003728 A JP2010003728 A JP 2010003728A
- Authority
- JP
- Japan
- Prior art keywords
- head
- load
- nozzle
- component
- mounting
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Granted
Links
Images








Abstract
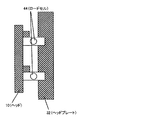
【解決手段】水平方向の一軸に案内移動されるヘッドプレート32と、該ヘッドプレートに固定された搭載ヘッド10とを有するヘッドユニットを備えた表面実装機において、搭載ヘッド10とヘッドプレート32との間に垂直方向の荷重を測定する荷重センサ40を介設した。
【選択図】図4
Description
10A…吸着ノズル(ノズル)
30…ヘッドユニット
32…ヘッドプレート
36…リニアガイド
40…荷重センサ(水晶圧電式力センサ)
44…ロードセル
Claims (3)
- 水平方向の一軸に案内移動されるヘッドプレートと、該ヘッドプレートに固定された搭載ヘッドとを有するヘッドユニットを備えた表面実装機において、搭載ヘッドとヘッドプレートとの間に垂直方向の荷重を測定する荷重センサを介設したことを特徴とする表面実装装置。
- 前記搭載ヘッドを前記ヘッドプレートに少なくとも3箇所で固定し、各固定箇所に荷重センサを介設することを特徴とする請求項1に記載の表面実装装置。
- 前記搭載ヘッドを前記ヘッドプレートに、対向配置されたリニアガイドを介して垂直方向に移動可能に固定し、リニアガイド間の中心位置に荷重センサを介設することを特徴とする請求項1に記載の表面実装装置。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2008158943A JP5121590B2 (ja) | 2008-06-18 | 2008-06-18 | 表面実装装置 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2008158943A JP5121590B2 (ja) | 2008-06-18 | 2008-06-18 | 表面実装装置 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2010003728A true JP2010003728A (ja) | 2010-01-07 |
| JP5121590B2 JP5121590B2 (ja) | 2013-01-16 |
Family
ID=41585232
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2008158943A Active JP5121590B2 (ja) | 2008-06-18 | 2008-06-18 | 表面実装装置 |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP5121590B2 (ja) |
Cited By (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| WO2019131698A1 (ja) * | 2017-12-26 | 2019-07-04 | ミネベアミツミ株式会社 | 荷重センサおよび荷重センサ一体型多軸アクチュエータ |
| WO2020027273A1 (ja) * | 2018-08-01 | 2020-02-06 | Thk株式会社 | アクチュエータの荷重検出器 |
| CN113260247A (zh) * | 2020-02-12 | 2021-08-13 | 先进装配系统有限责任两合公司 | 更换台、装配机、测力单元及测量装配力的方法 |
Citations (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2007088154A (ja) * | 2005-09-21 | 2007-04-05 | Juki Corp | 電子部品実装機 |
-
2008
- 2008-06-18 JP JP2008158943A patent/JP5121590B2/ja active Active
Patent Citations (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2007088154A (ja) * | 2005-09-21 | 2007-04-05 | Juki Corp | 電子部品実装機 |
Cited By (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| WO2019131698A1 (ja) * | 2017-12-26 | 2019-07-04 | ミネベアミツミ株式会社 | 荷重センサおよび荷重センサ一体型多軸アクチュエータ |
| US10955303B2 (en) | 2017-12-26 | 2021-03-23 | Minebea Mitsumi Inc. | Load sensor and load sensor integrated type multiaxial actuator |
| WO2020027273A1 (ja) * | 2018-08-01 | 2020-02-06 | Thk株式会社 | アクチュエータの荷重検出器 |
| JP2020020678A (ja) * | 2018-08-01 | 2020-02-06 | Thk株式会社 | アクチュエータの荷重検出器 |
| CN113260247A (zh) * | 2020-02-12 | 2021-08-13 | 先进装配系统有限责任两合公司 | 更换台、装配机、测力单元及测量装配力的方法 |
Also Published As
| Publication number | Publication date |
|---|---|
| JP5121590B2 (ja) | 2013-01-16 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JPWO2007111296A1 (ja) | 実装ヘッド、および電子部品実装装置 | |
| JP4560682B2 (ja) | 導電性ボール搭載装置 | |
| JP6603475B2 (ja) | 基板搬送装置及び電子部品実装装置 | |
| JP4330512B2 (ja) | 部品実装装置 | |
| JP6219838B2 (ja) | 部品実装機 | |
| JP4455260B2 (ja) | 部品搬送装置、表面実装機および部品試験装置 | |
| WO2015087420A1 (ja) | 部品実装装置 | |
| JP5121590B2 (ja) | 表面実装装置 | |
| JP5329308B2 (ja) | 電子部品搭載ヘッド | |
| TWI423354B (zh) | 導電球安裝裝置 | |
| US20060231200A1 (en) | Conductive ball mounting apparatus | |
| KR101009534B1 (ko) | 칩 마운터 | |
| JP4316325B2 (ja) | 部品実装機用架台及び部品実装機 | |
| JP5995307B2 (ja) | 認識装置、認識方法、プログラム及び基板の製造方法 | |
| WO2019116506A1 (ja) | ワーク作業装置 | |
| JP6546664B2 (ja) | ロータリーヘッド、及び、表面実装機 | |
| JP2007318000A (ja) | 表面実装機 | |
| JP2013143538A (ja) | 部品実装装置、部品実装方法、部品実装装置の制御用プログラム、記録媒体 | |
| JP5686321B2 (ja) | 実装装置、電子部品の実装方法及び基板の製造方法 | |
| JP4415326B2 (ja) | ボールマウント装置 | |
| KR102208102B1 (ko) | 부품 실장 장치 및 기판의 유지 방법 | |
| JP4832112B2 (ja) | 電子部品装着装置及び電子部品装着方法 | |
| JP4316336B2 (ja) | 部品実装ヘッド及び部品実装装置 | |
| JP5521524B2 (ja) | 直動装置及び部品実装機 | |
| JP4047608B2 (ja) | 実装機 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20110613 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20120703 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20120710 |
|
| A521 | Written amendment |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20120907 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20121002 |
|
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20121023 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20151102 Year of fee payment: 3 |
|
| R150 | Certificate of patent or registration of utility model |
Free format text: JAPANESE INTERMEDIATE CODE: R150 Ref document number: 5121590 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 |