JP2010000736A - 画像形成装置 - Google Patents
画像形成装置 Download PDFInfo
- Publication number
- JP2010000736A JP2010000736A JP2008162792A JP2008162792A JP2010000736A JP 2010000736 A JP2010000736 A JP 2010000736A JP 2008162792 A JP2008162792 A JP 2008162792A JP 2008162792 A JP2008162792 A JP 2008162792A JP 2010000736 A JP2010000736 A JP 2010000736A
- Authority
- JP
- Japan
- Prior art keywords
- recording head
- scanning direction
- recording
- main scanning
- image
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Granted
Links
Images















Classifications
-
- G—PHYSICS
- G06—COMPUTING OR CALCULATING; COUNTING
- G06K—GRAPHICAL DATA READING; PRESENTATION OF DATA; RECORD CARRIERS; HANDLING RECORD CARRIERS
- G06K15/00—Arrangements for producing a permanent visual presentation of the output data, e.g. computer output printers
- G06K15/02—Arrangements for producing a permanent visual presentation of the output data, e.g. computer output printers using printers
- G06K15/10—Arrangements for producing a permanent visual presentation of the output data, e.g. computer output printers using printers by matrix printers
- G06K15/102—Arrangements for producing a permanent visual presentation of the output data, e.g. computer output printers using printers by matrix printers using ink jet print heads
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B41—PRINTING; LINING MACHINES; TYPEWRITERS; STAMPS
- B41J—TYPEWRITERS; SELECTIVE PRINTING MECHANISMS, i.e. MECHANISMS PRINTING OTHERWISE THAN FROM A FORME; CORRECTION OF TYPOGRAPHICAL ERRORS
- B41J2/00—Typewriters or selective printing mechanisms characterised by the printing or marking process for which they are designed
- B41J2/005—Typewriters or selective printing mechanisms characterised by the printing or marking process for which they are designed characterised by bringing liquid or particles selectively into contact with a printing material
- B41J2/01—Ink jet
- B41J2/21—Ink jet for multi-colour printing
- B41J2/2132—Print quality control characterised by dot disposition, e.g. for reducing white stripes or banding
- B41J2/2135—Alignment of dots
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B41—PRINTING; LINING MACHINES; TYPEWRITERS; STAMPS
- B41J—TYPEWRITERS; SELECTIVE PRINTING MECHANISMS, i.e. MECHANISMS PRINTING OTHERWISE THAN FROM A FORME; CORRECTION OF TYPOGRAPHICAL ERRORS
- B41J29/00—Details of, or accessories for, typewriters or selective printing mechanisms not otherwise provided for
- B41J29/38—Drives, motors, controls or automatic cut-off devices for the entire printing mechanism
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B41—PRINTING; LINING MACHINES; TYPEWRITERS; STAMPS
- B41J—TYPEWRITERS; SELECTIVE PRINTING MECHANISMS, i.e. MECHANISMS PRINTING OTHERWISE THAN FROM A FORME; CORRECTION OF TYPOGRAPHICAL ERRORS
- B41J29/00—Details of, or accessories for, typewriters or selective printing mechanisms not otherwise provided for
- B41J29/38—Drives, motors, controls or automatic cut-off devices for the entire printing mechanism
- B41J29/393—Devices for controlling or analysing the entire machine ; Controlling or analysing mechanical parameters involving printing of test patterns
Landscapes
- Engineering & Computer Science (AREA)
- Physics & Mathematics (AREA)
- Mathematical Physics (AREA)
- General Engineering & Computer Science (AREA)
- General Physics & Mathematics (AREA)
- Theoretical Computer Science (AREA)
- Quality & Reliability (AREA)
- Ink Jet (AREA)
Abstract
【解決手段】記録ヘッドの往路走査時に記録ヘッドのノズル列の主走査方向で位置の異なるノズルを用いて用紙上に同時に形成されたドット画像であって、その中心位置が特定可能な2つの第1マークと、記録ヘッドの復路走査時に前記第1マークを形成したノズルを用いて前記第1マークから主走査方向に所定のオフセット量で用紙上に同時に形成されたドット画像であって、その中心位置が特定可能な2つの第2マークと、を撮像手段が一視野で撮像した較正画像データから、記録ヘッドの往復走査による記録位置のずれ量および往復走査時それぞれの記録ヘッド傾き量を検知し(S31)、該検知された記録位置のずれ量及び記録ヘッド傾き量を用いて、記録ヘッドの駆動を補正する(S41)。
【選択図】図11
Description
〔1〕 インクを吐出して被記録媒体上にドットを形成する複数のノズルが前記被記録媒体の送り方向(副走査方向)及び該送り方向に直交する方向(主走査方向)に配列されてなるノズル列を有し、主走査方向に往復走査されて前記被記録媒体上にドット画像を形成する記録ヘッドと、前記被記録媒体の所定位置のドット画像を撮像する撮像手段と、前記記録ヘッドを往路方向に移動しつつ前記ノズル列の主走査方向で位置の異なるノズルを用いて前記被記録媒体上に同時に形成されたドット画像であって、その中心位置が特定可能な2つの第1マークと、前記記録ヘッドを復路方向に移動しつつ前記第1マークを形成したノズルを用いて前記第1マークから主走査方向に所定距離だけずらすオフセットを設定して前記被記録媒体上に同時に形成されたドット画像であって、その中心位置が特定可能な2つの第2マークと、を前記撮像手段が一視野で撮像した較正画像データから、前記記録ヘッドの往路走査時のドット画像と復路走査時のドット画像の位置ずれ量および往復走査時それぞれの記録ヘッド傾き量を検知する検知手段と、前記検知手段により検知された位置ずれ量及び記録ヘッド傾き量を用いて、前記記録ヘッドの駆動を補正する補正手段と、
を備える画像形成装置。
〔2〕 前記撮像手段は、静止した状態で前記較正画像データを撮像する前記〔1〕に記載の画像形成装置。
〔3〕 前記位置ずれ量は、前記較正画像データにおける同じノズルで形成された第1マークの1つと第2マークの1つとの位置関係から求められる前記〔1〕に記載の画像形成装置。
〔4〕 前記往路走査時の記録ヘッド傾き量は前記較正画像データにおける2つの第1マークの位置関係から求められ、前記復路走査時の記録ヘッド傾き量は前記較正画像データにおける2つの第2マークの位置関係から求められる前記〔1〕に記載の画像形成装置。
〔5〕 前記補正手段は、前記ノズル列における駆動ノズルの位置及び/又はノズルの吐出タイミングを補正する前記〔1〕に記載の画像形成装置。
〔6〕 前記検知手段は、前記被記録媒体の主走査方向の複数の位置で、前記記録ヘッドの往路走査時のドット画像と復路走査時のドット画像の位置ずれ量および往復走査時それぞれの記録ヘッド傾き量を検知する前記〔1〕に記載の画像形成装置。
〔7〕 前記撮像手段は、前記被記録媒体の主走査方向の複数の位置それぞれで、静止した状態で前記較正画像データを撮像する前記〔6〕に記載の画像形成装置。
図1は、本発明に係る画像形成装置の一態様であるインクジェット記録装置を前方側から見た斜視説明図である。
このインクジェット記録装置は、装置本体1と、装置本体1に装着された用紙を装填するための給紙トレイ2と、装置本体1に着脱自在に装着されて画像が記録(形成)された用紙をストックするための排紙トレイ3とを備えている。さらに、装置本体1の前面の一端部側(給排紙トレイ部の側方)には、前面から装置本体1の前方側に突き出し、上面よりも低くなったインクカートリッジを装填するためのカートリッジ装填部4を有し、このカートリッジ装填部4の上面は操作ボタンや表示器などを設ける操作/表示部5としている。
フレーム21を構成する左右の側板21A、21Bに横架したガイド部材であるガイドロッド31とステー32とでキャリッジ33を主走査方向に摺動自在に保持し、図示しない主走査モータによってタイミングベルトを介して図3で矢示方向(キャリッジ主走査方向)に移動走査する。
この制御部100は、装置全体の制御を司る手段、用紙42の搬送動作及び記録ヘッド34の移動動作に関する制御を司る手段、演算処理を兼ねたCPU101と、CPU101が実行するプログラム、その他第1マーク及び第2マークからなるテストパターン(後述)に関するデータなどの固定データを格納するROM102と、演算に使用する作業領域や画像データ等を一時格納するバッファ等で使用するRAM103と、装置の電源が遮断されている間もマシン情報(バージョンやマシン特有の特性値等)のデータを保持するための不揮発性メモリ(NVRAM)104と、各種信号処理、並び替えなどを行う画像処理やその他装置全体を制御(メカ制御、メモリ制御、CPU101とのI/F制御)するための入出力信号を処理するASIC105とを備えている。
ここまでは、従来のインクジェット記録装置の構成と同じである。
キャリッジ33が静止状態(c)のときは被記録媒体42に対し、記録ヘッド34は主走査方向X、副走査方向Yに傾きを持っていない状態で印字ができる。しかし、駆動状態(e),(d)においては、記録ヘッド34は主・副走査方向に傾きを持った状態となる。このときの記録ヘッド34の傾き(XY平面における記録ヘッド34の回転)を傾き成分θとする。
キャリッジ33が静止状態(g)においては被記録媒体42に対し、記録ヘッド34は主走査方向X、被記録媒体42の紙面に対して垂直方向Zに傾きを持っていない状態であり、インク吐出方向が真直ぐである。しかし、駆動状態(j),(h)においては、キャリッジ33が傾き、インク吐出方向がZ軸に対して傾いて、着弾位置が主走査方向にずれてしまう。このときの記録ヘッド34の傾き(XZ平面における記録ヘッド34の回転)を傾き成分δとする。
以下、本発明の根幹を成す部分について説明する。
キャリッジ33はガイドロッド(摺動軸)31に沿って主走査方向Xに往復走査され、キャリッジ33内の記録ヘッド34はその往復走査に伴って移動して被記録媒体42の所定位置にインクを吐出して画像形成を行う。キャリッジ33の側面には撮像手段として二次元撮像装置(以下、撮像装置ともいう)37が装着されており、キャリッジ33の走査に伴って主走査方向に移動することが可能である。また、二次元撮像装置37内には主走査方向及び副走査方向それぞれに平行な基準座標X,Yが設けられている。
本構成例では、二次元撮像装置37は、キャリッジ33とは別体の撮像装置キャリッジ38に搭載されており、専用のガイドロッド(摺動軸)39に沿って主走査方向に移動することが可能に設けられている。
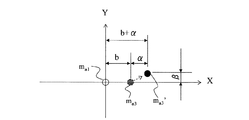
図9は、位置ずれ補正をかけていない画像データに基づいて、記録位置のずれがない理想的な状態で記録されたドット画像である第1マーク及び第2マーク(第1および第2のテストパターン)の状態を示している。すなわち、CPU101内で設定された目標画像データということもできる。なお、図中のX軸、Y軸は、撮像手段37で撮像したときの撮像手段37内に設定された基準座標X,Yであり、以降のXY座標で示す図において同様とする。
図10では、図4の制御ブロック図に、撮像装置キャリッジ38をガイドロッド39に沿って走査する撮像装置キャリッジドライバ118と、撮像装置37による撮像タイミングを制御する撮像装置ドライバ119と、をCPU101で制御可能に追加している。
[テストパターン印字ステップ]
(S11) CPU101は、主走査ドライバである主走査モータ110,主走査モータ駆動部111を介した制御により、キャリッジ33を初期位置(往路走査スタート位置)に移動する。このとき、用紙42は画像形成可能な位置に搬送されている。
(S12) 主走査方向のうち、往路方向にキャリッジ33を移動させながら、ヘッドドライバ108の吐出タイミング制御により用紙42の所定位置で記録ヘッド34からインクを吐出する。このとき、ROM102に格納されたデータに基づいて駆動波形が生成され、吐出タイミングの制御がされており、その結果として第1のテストパターンとして第1マークma1,ma2が印字される(S13)。ついでキャリッジ33が所定位置まで移動して往路方向の走査が終了する(S14)。
(S15) 主走査方向のうち、復路方向にキャリッジ33を移動させながら、ヘッドドライバ108の吐出タイミング制御により用紙42の所定位置(第1マークma1,ma2からオフセット量bだけ主走査方向にずらした位置)で記録ヘッド34からインクを吐出する。このとき、ROM102に格納されたデータに基づいて駆動波形が生成され、吐出タイミングの制御がされており、その結果として、第2のテストパターンとして第2マークma3,ma4が印字される(S16)。ついでキャリッジ33が所定位置まで移動して復路方向の走査が終了する(S17)。
(S18)最後に、キャリッジを初期位置に移動させてパターン印字ステップを終了する。
(S21) 副走査ドライバである副走査モータ112,副走査モータ駆動部113の制御により搬送ベルト51が駆動され、形成した第1マークma1,ma2、第2マークma3,ma4が撮像装置37により撮像可能となる位置(第1マークma1,ma2、第2マークma3,ma4の副走査方向の位置が撮像装置37の直下となる位置)まで用紙42が副走査方向に搬送される。
(S22) 撮像装置キャリッジドライバ118の制御により撮像装置キャリッジ38を主走査方向に移動させて、撮像装置37を初期位置(例えば、主走査方向の往路走査の初期位置)まで移動させる。
(S23) 主走査方向のうち、往路方向に撮像装置キャリッジ38を移動させる。
(S24) 撮像装置37が第1マークma1,ma2、第2マークma3,ma4の直上となる位置でキャリッジ38を静止させる。パターン撮像時に撮像装置37を静止することで、撮像される較正画像データ(パターンデータ)における画像のブレをなくすためである。また、撮像手段が駆動することで生じる撮像装置37の傾きを防ぎ、撮像装置37内の基準座標軸が傾くことを防ぐためである。
(S25) 撮像制御ドライバ119の制御により、静止状態の撮像装置37は用紙42上のドット画像を撮像する。このとき、第1マークma1,ma2及び第2マークma3,ma4は同時に撮像され、較正画像データとして取得される。この較正画像データはCPU101を介して記憶手段であるNVRAM104に記憶される。
以上のステップを経て撮像動作が終了し(S26)、撮像装置キャリッジ38を主走査方向に移動させて、撮像装置37を初期位置まで移動させる(S27)。
(S31) NVRAMに記憶された較正画像データに基づいて、印字ズレ量および傾き量検出プログラムにより、記録ヘッド34の往路走査時のドット画像と復路走査時のドット画像の位置ずれ量(主走査方向及び副走査方向の記録位置のずれ量)および往復走査時それぞれの記録ヘッド傾き量が算出される(詳細は後述)。
(S32) ステップS31の算出結果に基づいて、記録ヘッド34の駆動を補正する補正値を算出する。ここで、記録ヘッド34の駆動の補正とは、記録ヘッド34のノズル列において駆動するノズルの位置及び/又はノズルの吐出タイミングを補正することである。
(S41) ステップS32の補正値が記録ヘッド34の駆動に反映されて、入力画像データに基づいた画像形成が行われる。これにより、往路走査時の印字位置と、復路走査時の印字位置を合わせることができ、画像劣化を防ぐことが可能となる。また、往路走査時と復路走査時の記録ヘッド34(キャリッジ33)の傾きを補正することで、より正確な印字位置合わせを実現することが可能となる。
よってこの場合、記録位置ズレ量として、主走査方向にα、副走査方向にβを検知することができる。なお、第1マーク、第2マークの位置とは、それぞれのドット画像の中心位置のことをいう。
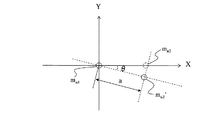
よってこの場合、第1マークma1,第1マークma2’それぞれの中心を結ぶ線と、基準座標Xとのなす角度から記録ヘッド34の傾きを検知することができる。
図15は、記録ヘッド34(キャリッジ33)が図5で説明したθ方向に傾いていることを前提としており、図15(a)は補正後に目標とする用紙上のドット画像のパターン、図15(b)は記録ヘッド34側の補正概念を示すイメージ図である。
(手順1) まず補正をかけていない元のノズルn1の位置(Xs−Ys座標(4,3))を基準として、較正画像データから求められる、記録ヘッド34の往路走査時のドット画像と復路走査時のドット画像の位置ずれ量(+α,+β)に基づいて、ノズルn1の座標(4,3)からXs方向に+α、Ys方向に+βだけ移動した一次補正座標(4+α,3+β)(ここでは、(7,4))のノズルn1’fを仮に選択する。
(手順2) つぎに、較正画像データから求められる、往路走査時の記録ヘッド傾き量(角度−θ)に基づいて、ノズルn1の位置(Xs−Ys座標(4,3))を原点として、ノズルn1’fの位置(4+α,3+β)を角度+θだけ回転させた二次補正座標、もしくは該二次補正座標に最も近い位置のノズルn1’(ここでは座標(6,5))を最終補正ノズルとして選択する。
また、本発明では、「第1テストパターン内に印字した2つの第1マークma1,ma2間の傾き」と「撮像手段内の座標軸」の傾き差から、往路走査時の記録ヘッド34の傾き量を検知することが可能である。
また、本発明では、「第2のテストパターン内に印字した2つの第2マークma3,ma4間の傾き」と「撮像手段内の座標軸」の傾き差から、復路走査時の記録ヘッド34の傾き量を検知することが可能である。
また、撮像手段で第1,第2のテストパターンを同時に撮像した較正画像データを用いることで、前記記録位置のズレ量と記録ヘッド傾き量を同時に検知することが可能である。
さらに、検知された記録位置のズレ量と記録ヘッド傾き量から、往路走査と復路走査、両者の記録ヘッドの傾きを撮像系の基準座標(主走査方向X、副走査方向Y)に合わせ、往路復路間の傾き誤差をなくすことができ、記録位置のずれを適切に補正することが可能である。
すなわち、検知手段(CPU101)は、被記録媒体(用紙42)の主走査方向の複数の位置で、前記記録ヘッド(記録ヘッド34)の往路走査時のドット画像(第1マーク)と復路走査時のドット画像(第2マーク)の位置ずれ量および往復走査時それぞれの記録ヘッド傾き量を検知する構成とする。またこのとき、前記撮像手段(撮像装置37)は、前記被記録媒体の主走査方向の複数の位置それぞれで、静止した状態で前記較正画像データを撮像する。
(S24´) 撮像装置37が所定領域の第1マークma1,ma2、第2マークma3,ma4の直上となる位置でキャリッジ38を静止させる。パターン撮像時に撮像装置37を静止することで、撮像される較正画像データ(パターンデータ)における画像のブレをなくすためである。また、撮像手段が駆動することで生じる撮像装置37の傾きを防ぎ、撮像装置37内の基準座標軸が傾くことを防ぐためである。
(S25´) 撮像制御ドライバ119の制御により、静止状態の撮像装置37は用紙42上のドット画像を撮像する。このとき、第1マークma1,ma2及び第2マークma3,ma4は同時に撮像され、所定領域の較正画像データとして取得される。この較正画像データはCPU101を介して記憶手段であるNVRAM104に記憶される。
これらの処理について、撮像装置キャリッジ38を領域g,f,e,d,cに順番に移動させて、それぞれの領域で繰り返して行う。
(S31´) NVRAMに記憶された領域c,d,e,f,gごとの較正画像データに基づいて、印字ズレ量および傾き量検出プログラムにより、領域c,d,e,f,gごとの記録ヘッド34の往路走査時のドット画像と復路走査時のドット画像の位置ずれ量(主走査方向及び副走査方向の記録位置のずれ量)および往復走査時それぞれの記録ヘッド傾き量が算出される。
(S32´) ステップS31´の算出結果に基づいて、領域c,d,e,f,gに対応した主走査方向の所定区間ごとの記録ヘッド34の駆動を補正する補正値を算出する。ここで、記録ヘッド34の駆動の補正とは、記録ヘッド34のノズル列において駆動するノズルの位置及び/又はノズルの吐出タイミングを補正することである。
(S41´) ステップS32´の補正値が記録ヘッド34の駆動に反映されて、領域c,d,e,f,gに対応した主走査方向の所定区間ごとで入力画像データに基づいた画像形成が行われる。これにより、往路走査時の印字位置と、復路走査時の印字位置を合わせることができ、画像劣化を防ぐことが可能となる。また、往路走査時と復路走査時の記録ヘッド34(キャリッジ33)の傾きを補正することで、より正確な印字位置合わせを実現することが可能となる。とくに、主走査方向に複数箇所、記録位置ズレ量および記録ヘッド傾き量の検知・補正機構を設けることで、主走査距離の長い記録装置でも位置精度の高い画像を実現することができる。
2 給紙トレイ
3 排紙トレイ
4 カートリッジ装填部
5 操作/表示部
10,10k、10c、10m、10y インクカートリッジ
11k、11c、11m、11y 残量表示部
12 電源ボタン
13 用紙送り/印刷再開ボタン
14 キャンセルボタン
16 エンコーダセンサ
17 センサ(アナログセンサ)
21 フレーム
24 供給ポンプ
30 制御部
31,39 ガイドロッド
32 ステー
33 キャリッジ
34 記録ヘッド
35 サブタンク
36 インク供給チューブ
37 二次元撮像装置(撮像装置)
38 撮像装置キャリッジ
51 搬送ベルト
81 維持回復機構
82,82a,82b,82c,82d キャップ
83 ワイパーブレード
84,88 空吐出受け
89 開口
90 ホストPC
100 制御部
101 CPU
102 ROM
103 RAM
104 NVRAM
105 ASIC
106 ホストI/F
107 駆動波形生成部
108 ヘッドドライバ
110 主走査モータ
111 主走査モータ駆動部
112 副走査モータ
113 副走査モータ駆動部
114 ACバイアス供給部
115 維持回復機構駆動部
116 モータ
116a ADC
117 操作/表示部
118 撮像装置キャリッジドライバ
119 撮像制御ドライバ
ma1,ma1’,ma1’f,ma2,ma2’,ma3,ma3’,ma4 マーク
n1,n1’,n1’f ノズル
Claims (7)
- インクを吐出して被記録媒体上にドットを形成する複数のノズルが前記被記録媒体の送り方向(副走査方向)及び該送り方向に直交する方向(主走査方向)に配列されてなるノズル列を有し、主走査方向に往復走査されて前記被記録媒体上にドット画像を形成する記録ヘッドと、
前記被記録媒体の所定位置のドット画像を撮像する撮像手段と、
前記記録ヘッドを往路方向に移動しつつ前記ノズル列の主走査方向で位置の異なるノズルを用いて前記被記録媒体上に同時に形成されたドット画像であって、その中心位置が特定可能な2つの第1マークと、前記記録ヘッドを復路方向に移動しつつ前記第1マークを形成したノズルを用いて前記第1マークから主走査方向に所定距離だけずらすオフセットを設定して前記被記録媒体上に同時に形成されたドット画像であって、その中心位置が特定可能な2つの第2マークと、を前記撮像手段が一視野で撮像した較正画像データから、前記記録ヘッドの往路走査時のドット画像と復路走査時のドット画像の位置ずれ量および往復走査時それぞれの記録ヘッド傾き量を検知する検知手段と、
前記検知手段により検知された位置ずれ量及び記録ヘッド傾き量を用いて、前記記録ヘッドの駆動を補正する補正手段と、
を備える画像形成装置。 - 前記撮像手段は、静止した状態で前記較正画像データを撮像する請求項1に記載の画像形成装置。
- 前記位置ずれ量は、前記較正画像データにおける同じノズルで形成された第1マークの1つと第2マークの1つとの位置関係から求められる請求項1に記載の画像形成装置。
- 前記往路走査時の記録ヘッド傾き量は前記較正画像データにおける2つの第1マークの位置関係から求められ、前記復路走査時の記録ヘッド傾き量は前記較正画像データにおける2つの第2マークの位置関係から求められる請求項1に記載の画像形成装置。
- 前記補正手段は、前記ノズル列における駆動ノズルの位置及び/又はノズルの吐出タイミングを補正する請求項1に記載の画像形成装置。
- 前記検知手段は、前記被記録媒体の主走査方向の複数の位置で、前記記録ヘッドの往路走査時のドット画像と復路走査時のドット画像の位置ずれ量および往復走査時それぞれの記録ヘッド傾き量を検知する請求項1に記載の画像形成装置。
- 前記撮像手段は、前記被記録媒体の主走査方向の複数の位置それぞれで、静止した状態で前記較正画像データを撮像する請求項6に記載の画像形成装置。
Priority Applications (2)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2008162792A JP5396753B2 (ja) | 2008-06-23 | 2008-06-23 | 画像形成装置 |
| US12/457,791 US8191986B2 (en) | 2008-06-23 | 2009-06-22 | Image forming apparatus |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2008162792A JP5396753B2 (ja) | 2008-06-23 | 2008-06-23 | 画像形成装置 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2010000736A true JP2010000736A (ja) | 2010-01-07 |
| JP5396753B2 JP5396753B2 (ja) | 2014-01-22 |
Family
ID=41430906
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2008162792A Expired - Fee Related JP5396753B2 (ja) | 2008-06-23 | 2008-06-23 | 画像形成装置 |
Country Status (2)
| Country | Link |
|---|---|
| US (1) | US8191986B2 (ja) |
| JP (1) | JP5396753B2 (ja) |
Cited By (7)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2015006957A (ja) * | 2014-09-29 | 2015-01-15 | セイコーエプソン株式会社 | 記録装置 |
| JP2016221719A (ja) * | 2015-05-27 | 2016-12-28 | 株式会社リコー | 距離計測装置、画像形成装置、距離計測方法およびプログラム |
| JP2017047608A (ja) * | 2015-09-02 | 2017-03-09 | セイコーエプソン株式会社 | 濃度むら補正方法、印刷装置、及び撮像モジュール |
| JP2017177776A (ja) * | 2016-03-31 | 2017-10-05 | ブラザー工業株式会社 | 印刷装置 |
| JP2018083404A (ja) * | 2016-11-25 | 2018-05-31 | 株式会社リコー | 画像形成装置、実距離算出方法、およびプログラム |
| JP2018083405A (ja) * | 2016-11-25 | 2018-05-31 | 株式会社リコー | 画像形成装置、距離算出方法、およびプログラム |
| JP2018083334A (ja) * | 2016-11-22 | 2018-05-31 | 株式会社リコー | 画像形成装置、距離算出方法、およびプログラム |
Families Citing this family (17)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US8827401B2 (en) * | 2003-08-19 | 2014-09-09 | Ricoh Company, Ltd. | Recording device including a device to detect misalignment of dots |
| JP5621347B2 (ja) * | 2009-07-10 | 2014-11-12 | 株式会社リコー | 記録装置及びプログラム |
| JP2011079296A (ja) | 2009-09-14 | 2011-04-21 | Ricoh Co Ltd | 記録装置及び制御方法 |
| JP5402437B2 (ja) * | 2009-09-14 | 2014-01-29 | 株式会社リコー | 搬送制御装置、記録装置、制御方法及びプログラム |
| JP5574093B2 (ja) * | 2009-11-24 | 2014-08-20 | 株式会社リコー | 画像形成装置 |
| JP5599239B2 (ja) * | 2010-06-28 | 2014-10-01 | 富士フイルム株式会社 | インクジェット印刷装置及びその印刷方法 |
| JP5906980B2 (ja) * | 2012-07-23 | 2016-04-20 | 富士ゼロックス株式会社 | 画像形成装置および画像読取装置 |
| WO2014107897A1 (en) * | 2013-01-14 | 2014-07-17 | Hewlett-Packard Development Company, L.P. | Media alignment |
| JP5758025B1 (ja) * | 2014-04-30 | 2015-08-05 | 株式会社Pfu | 画像読取装置 |
| JP2016014564A (ja) | 2014-07-01 | 2016-01-28 | 株式会社リコー | 撮像ユニット |
| EP3209017B1 (en) | 2014-10-17 | 2019-12-04 | Ricoh Company, Ltd. | Vehicle image display system |
| US10207495B2 (en) * | 2016-11-22 | 2019-02-19 | Ricoh Company, Ltd. | Image forming apparatus, method for calculating actual distance of deviation, and computer program product storing same |
| US10286699B2 (en) * | 2016-11-22 | 2019-05-14 | Ricoh Company, Ltd. | Imaging device, image forming apparatus, and method for detecting deviation of landing position |
| US10889127B2 (en) | 2018-03-19 | 2021-01-12 | Ricoh Company, Ltd. | Liquid discharge apparatus, defective nozzle detection method, and recording medium |
| US11072170B2 (en) | 2018-09-27 | 2021-07-27 | Ricoh Company, Ltd. | Liquid discharge apparatus, liquid discharge method, and recording medium |
| CN115384186B (zh) * | 2021-05-20 | 2023-09-08 | 深圳市汉森软件有限公司 | 喷头姿态校准方法、装置及设备 |
| CN113997693A (zh) * | 2021-09-13 | 2022-02-01 | 宁波得力科贝技术有限公司 | 一种打印头校准方法、控制芯片以及打印机 |
Citations (10)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH0441252A (ja) * | 1990-06-08 | 1992-02-12 | Canon Inc | 画像形成装置 |
| JPH11216854A (ja) * | 1998-01-30 | 1999-08-10 | Copyer Co Ltd | インクジェット画像形成装置 |
| WO2000030857A1 (fr) * | 1998-11-20 | 2000-06-02 | Seiko Epson Corporation | Imprimante a points possedant une synchronisation reglable |
| JP2001121687A (ja) * | 1999-02-10 | 2001-05-08 | Seiko Epson Corp | 印刷ヘッドユニットのヘッド識別情報を用いた印刷時の記録位置ズレの調整 |
| JP2001334654A (ja) * | 2000-05-30 | 2001-12-04 | Seiko Epson Corp | 異なるタイミングで形成されるドット間の形成位置のずれの調整 |
| JP2003291326A (ja) * | 2002-04-02 | 2003-10-14 | Konica Corp | インクジェットプリンタの調整方法及び制御方法 |
| JP2004106538A (ja) * | 2002-08-29 | 2004-04-08 | Seiko Epson Corp | 記録位置補正方法、インクジェット式記録装置、及びプログラム |
| JP2005103921A (ja) * | 2003-09-30 | 2005-04-21 | Seiko Epson Corp | 画像処理装置、画像処理方法、画像処理プログラムおよび印刷制御装置 |
| JP2006159779A (ja) * | 2004-12-09 | 2006-06-22 | Canon Inc | インクジェット記録装置及び記録位置合わせ方法 |
| JP2008132795A (ja) * | 2008-02-25 | 2008-06-12 | Seiko Epson Corp | 印刷ヘッドのキャリッジへの取り付け位置の調整が可能な印刷装置 |
Family Cites Families (7)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2000296609A (ja) | 1999-02-10 | 2000-10-24 | Seiko Epson Corp | 基準補正値と相対補正値とを用いた双方向印刷時の記録位置ズレの調整 |
| JP3480374B2 (ja) * | 1999-07-08 | 2003-12-15 | セイコーエプソン株式会社 | ノズル列の傾きを考慮した双方向印刷の位置ズレ補正 |
| JP4298363B2 (ja) | 2003-04-18 | 2009-07-15 | 株式会社リコー | 画像形成装置 |
| JP4398304B2 (ja) | 2004-05-31 | 2010-01-13 | 株式会社リコー | 画像形成装置 |
| JP4693528B2 (ja) * | 2005-07-08 | 2011-06-01 | キヤノン株式会社 | 記録装置および記録位置制御方法 |
| JP5020555B2 (ja) | 2005-07-08 | 2012-09-05 | キヤノン株式会社 | インクジェット記録装置及びそのドットパターン記録方法 |
| JP5574093B2 (ja) | 2009-11-24 | 2014-08-20 | 株式会社リコー | 画像形成装置 |
-
2008
- 2008-06-23 JP JP2008162792A patent/JP5396753B2/ja not_active Expired - Fee Related
-
2009
- 2009-06-22 US US12/457,791 patent/US8191986B2/en not_active Expired - Fee Related
Patent Citations (10)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH0441252A (ja) * | 1990-06-08 | 1992-02-12 | Canon Inc | 画像形成装置 |
| JPH11216854A (ja) * | 1998-01-30 | 1999-08-10 | Copyer Co Ltd | インクジェット画像形成装置 |
| WO2000030857A1 (fr) * | 1998-11-20 | 2000-06-02 | Seiko Epson Corporation | Imprimante a points possedant une synchronisation reglable |
| JP2001121687A (ja) * | 1999-02-10 | 2001-05-08 | Seiko Epson Corp | 印刷ヘッドユニットのヘッド識別情報を用いた印刷時の記録位置ズレの調整 |
| JP2001334654A (ja) * | 2000-05-30 | 2001-12-04 | Seiko Epson Corp | 異なるタイミングで形成されるドット間の形成位置のずれの調整 |
| JP2003291326A (ja) * | 2002-04-02 | 2003-10-14 | Konica Corp | インクジェットプリンタの調整方法及び制御方法 |
| JP2004106538A (ja) * | 2002-08-29 | 2004-04-08 | Seiko Epson Corp | 記録位置補正方法、インクジェット式記録装置、及びプログラム |
| JP2005103921A (ja) * | 2003-09-30 | 2005-04-21 | Seiko Epson Corp | 画像処理装置、画像処理方法、画像処理プログラムおよび印刷制御装置 |
| JP2006159779A (ja) * | 2004-12-09 | 2006-06-22 | Canon Inc | インクジェット記録装置及び記録位置合わせ方法 |
| JP2008132795A (ja) * | 2008-02-25 | 2008-06-12 | Seiko Epson Corp | 印刷ヘッドのキャリッジへの取り付け位置の調整が可能な印刷装置 |
Cited By (7)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2015006957A (ja) * | 2014-09-29 | 2015-01-15 | セイコーエプソン株式会社 | 記録装置 |
| JP2016221719A (ja) * | 2015-05-27 | 2016-12-28 | 株式会社リコー | 距離計測装置、画像形成装置、距離計測方法およびプログラム |
| JP2017047608A (ja) * | 2015-09-02 | 2017-03-09 | セイコーエプソン株式会社 | 濃度むら補正方法、印刷装置、及び撮像モジュール |
| JP2017177776A (ja) * | 2016-03-31 | 2017-10-05 | ブラザー工業株式会社 | 印刷装置 |
| JP2018083334A (ja) * | 2016-11-22 | 2018-05-31 | 株式会社リコー | 画像形成装置、距離算出方法、およびプログラム |
| JP2018083404A (ja) * | 2016-11-25 | 2018-05-31 | 株式会社リコー | 画像形成装置、実距離算出方法、およびプログラム |
| JP2018083405A (ja) * | 2016-11-25 | 2018-05-31 | 株式会社リコー | 画像形成装置、距離算出方法、およびプログラム |
Also Published As
| Publication number | Publication date |
|---|---|
| US20090316164A1 (en) | 2009-12-24 |
| US8191986B2 (en) | 2012-06-05 |
| JP5396753B2 (ja) | 2014-01-22 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP5396753B2 (ja) | 画像形成装置 | |
| EP1956522B1 (en) | Imaging method and image forming apparatus | |
| US20110122184A1 (en) | Image forming apparatus, image formation method, and computer-readable medium | |
| JP5699579B2 (ja) | 記録装置、および記録装置の印刷位置ずれ調整方法、並びにプログラム | |
| JP2010030257A (ja) | 画像形成装置 | |
| JP2004351837A (ja) | 画像形成装置 | |
| JP2010030161A (ja) | 画像形成装置 | |
| JP2011056869A (ja) | 画像形成装置及び情報処理装置 | |
| JP4398304B2 (ja) | 画像形成装置 | |
| JP5365779B2 (ja) | インクジェット記録装置 | |
| JP2004276425A (ja) | 画像形成装置 | |
| JP5720136B2 (ja) | 画像形成装置及びプログラム | |
| JP4398219B2 (ja) | 画像形成装置 | |
| JP2009119751A (ja) | インクジェット記録装置及びその装置に用いる記録制御方法 | |
| JP4688187B2 (ja) | 画像形成装置 | |
| JP5101416B2 (ja) | 画像形成装置 | |
| JP2010201869A (ja) | 画像形成装置及びプログラム | |
| JP4688190B2 (ja) | 画像形成装置及びプログラム | |
| JP4428024B2 (ja) | 液体吐出装置、印刷制御装置、プログラム、液体吐出方法、および、液体吐出システム | |
| JP4104512B2 (ja) | 画像形成装置 | |
| JP5707805B2 (ja) | 画像形成装置 | |
| JP4632936B2 (ja) | 画像形成装置 | |
| JP2010188542A (ja) | 画像形成装置および画像形成方法 | |
| JP4623649B2 (ja) | 画像形成装置 | |
| JP2005066960A (ja) | 画像形成装置 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20110112 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20120717 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20120718 |
|
| A521 | Written amendment |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20120918 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20130219 |
|
| A521 | Written amendment |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20130417 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20130924 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20131007 |
|
| R151 | Written notification of patent or utility model registration |
Ref document number: 5396753 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R151 |
|
| LAPS | Cancellation because of no payment of annual fees |