JP2009009208A - 運転支援システム - Google Patents
運転支援システム Download PDFInfo
- Publication number
- JP2009009208A JP2009009208A JP2007167594A JP2007167594A JP2009009208A JP 2009009208 A JP2009009208 A JP 2009009208A JP 2007167594 A JP2007167594 A JP 2007167594A JP 2007167594 A JP2007167594 A JP 2007167594A JP 2009009208 A JP2009009208 A JP 2009009208A
- Authority
- JP
- Japan
- Prior art keywords
- vehicle
- roadside
- right turn
- information
- area
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Granted
Links
- 238000004891 communication Methods 0.000 claims abstract description 86
- 238000003384 imaging method Methods 0.000 claims abstract description 32
- 230000005540 biological transmission Effects 0.000 claims description 3
- SAZUGELZHZOXHB-UHFFFAOYSA-N acecarbromal Chemical compound CCC(Br)(CC)C(=O)NC(=O)NC(C)=O SAZUGELZHZOXHB-UHFFFAOYSA-N 0.000 claims 1
- 238000001514 detection method Methods 0.000 abstract description 7
- 238000000034 method Methods 0.000 description 7
- 230000008569 process Effects 0.000 description 6
- 101001093748 Homo sapiens Phosphatidylinositol N-acetylglucosaminyltransferase subunit P Proteins 0.000 description 2
- 230000009471 action Effects 0.000 description 2
- 230000008859 change Effects 0.000 description 2
- 239000000470 constituent Substances 0.000 description 2
- 238000010586 diagram Methods 0.000 description 2
- 238000004458 analytical method Methods 0.000 description 1
- 238000007405 data analysis Methods 0.000 description 1
- 239000000284 extract Substances 0.000 description 1
- 239000003550 marker Substances 0.000 description 1
- 238000012986 modification Methods 0.000 description 1
- 230000004048 modification Effects 0.000 description 1
- 239000003973 paint Substances 0.000 description 1
- 230000004044 response Effects 0.000 description 1
Images










Landscapes
- Traffic Control Systems (AREA)
Abstract
【解決手段】運転支援システム1は、路側装置2と、車両側装置3とを備え、路側装置2は、車両側装置3と通信して右折車固有情報を受信し、路側の右折車撮像用カメラ5などから車両固有情報を取得し、対向直進車の危険性を判定する。前記通信による右折車固有情報と、カメラ5による車両固有情報とが一致し、且つ対向直進車危険性有りと判定したときに、危険報知指令を右折車に送信する。車両側装置3では、該危険報知指令を受けたときには、前記路側で一致した車両固有情報と自車の車両固有情報とが一致し且つ自車が右折方向指示状態であることを条件にドライバーに危険性有りを報知する。
【選択図】図1
Description
特許文献1に記載のシステムでは、交差点に接近する対向直進車を検出し、警告メッセージをVICS送信機を介して右折レーン走行車両に伝達し、当該車両のスピーカから報知させる。
特許文献3に記載のシステムでは、非有線道を走行する車両が有線道を走行する車両と、交差点において衝突するのを防止すべく、交差点から所定距離はなれた非優先道に設置されたサービスイン用基点マーカと、交差点近くに設定されたサービスアウト用基点マーカとを備え、サービスエリアに入ると、路側からの情報により、衝突の危険性があると想定される場合に、ドライバーに警告あるいは緊急停止させるようにしている。
ここで、前記特許文献2や特許文献3では、路面に設けた位置検出支援装置(路面に埋め込んだ磁気ネイル(マーカ)の情報)から車両位置を把握する技術が記載されているが、道路側と車両側とにそれぞれ大掛かりな設備は装置が必要となり、コスト高となる。
本発明は上記事情に鑑みてなされたものであり、その目的は、車両の位置を検出する位置検出手段を要さずに、構成が簡単で、しかも右折車と対向直進車との衝突の危険性を判断して警告できる運転支援システムを提供することにある。
請求項4の運転支援システムは、前記右折車情報取得手段と、前記対向直進車危険性判定手段とが、右折エリアと対向直進エリアとを含んだエリアを撮像可能な撮像手段を共通に使用しているところに特徴を有する。
請求項5の運転支援システムは、前記右折車情報取得手段と、前記路側通信手段と、前記対向直進車危険性判定手段と、前記危険情報通知手段とで1つの路側装置を構成し、当該路側装置を、交差点における右折可能走行路に応じて設け、複数の路側装置が同時に動作するときには、当該複数の路側装置の路側通信手段の通信周波数を異ならせ、前記車両側通信手段を、前記異なる通信周波数のいずれの通信周波数でも通信可能に構成したところに特徴を有する。
これによれば、信号機の信号状況(進行許可(青や許可矢印など)、進行不可(赤など))によって、進行できる走行路が変化することに合わせて、対応する走行路の路側装置を駆動できると共に、無駄な駆動をなくすことができる。
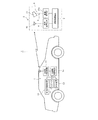
図1には運転支援システムの全体構成を示している。この図1において、運転支援システム1は、路側装置2と、車両側装置3とから構成されている。
路側装置2は、アンテナ41を有する路側通信装置4と、右折車撮像用カメラ5と、画像処理部5aと、対向直進車撮像用カメラ6、画像処理部6aと、路側制御装置7とを含んで構成されている。
上述した路側装置2の路側通信装置4と、右折車撮像用カメラ5と、対向直進車撮像用カメラ6とは、図2に示すように、交差点の1つの角部C1に設けられており、右折可能走行路Uとこれに対応する対向走行路U´とについて運転支援をするようになっている。
前記車両側通信装置10は、車両側通信手段に相当するもので、DSRSから構成されており、前記路側通信装置4と所定周波数で通信可能である。
前記スピーカ11及び表示装置12は報知手段に相当するものであり、危険性有りの報知を行なうものである。このスピーカ11及び表示装置12は車両が予め備えたオーディオ機器やナビゲーション装置のスピーカや表示装置を兼用しても良い。
前記車両側制御装置14は、CPU、ROM、RAM等を備えたマイクロコンピュータや、I/Oインターフェースなどを含んで構成されている。該車両側制御装置14におけるマイクロコンピュータには、そのソフトウエアにより、後述する車両固有情報送信手段及び報知制御手段として機能する。この車両側制御装置14は、自車の車両固有情報(ID情報、車種、色、大きさなど)を前記ROMに記憶している。
まず、図3(a)に示すように、路側制御装置7は、ステップS1で、所定時間間隔で路側通信装置4から右折エリアEr方向へポーリング電波を送出している。このポーリング電波エリア(通信エリア)を図2に符号「Ep」で示している。この場合、図面の煩雑さを防ぐために、当該通信エリアEpは前記右折エリアErと同じとしている。車両側にとっては、このポーリング電波を受信可能なエリアが通信エリアとなる。ステップS2では、右折車撮像用カメラ5により撮像された右折エリアEr部分の画像を画像処理部5aを介して画像データとして取得し、ステップS3では、対向直進車撮像用カメラ6により撮像された対向直進エリアEt部分の画像を画像処理部6aを介して画像データとして取得する。
ステップT3では、路側から車両固有情報(この場合少なくとも車両ID)を含んだ危険性報知指令を受信したか否かを判断し、受信すれば、ステップT4に移行し、自車の車両IDと当該受信した車両IDとが一致したか否かを判断する。
このような第3の実施例によれば、交差点における右折可能走行路UA、UB、UC、UDに対応して路側装置2A、2B、2C、2Dが設けられているから、右折可能走行路個々に対応して運転支援ができる。この場合、複数の路側装置2A、2B(2C、2D)が同時に動作するときには、当該複数の路側装置2A、2B(2C、2D)の路側通信装置4A、4B(4C、4D)の通信周波数を異ならせ、車両側通信装置10を、前記異なる通信周波数のいずれの通信周波数でも通信可能に構成したから、路側装置2A、2B(2C、2D)が同時に動作するときには、当該複数の路側装置2A、2B(2C、2D)間で通信が混信することがなく、確実な運転支援を実現できる。
本発明の第4の実施例として示す図11のように車両の屋根部に、目視困難であるが赤外線カメラでは良好に撮像可能な赤外線反応塗料で、車両固有情報Jを付設するようにしても良く、このようにすると、車両固有情報の取得ひいては車両の特定が簡単且つ確実となる。また、第1の実施例の図3(a)において、ステップS2(右折エリア画像データ取得)及びステップS3(対向直進エリア画像データ取得)は、ステップS4の「YES」(右折車からの車両固有情報などを受信した)を条件に実行するようにしても良い。また、前記第3の実施例において、各路側装置の通信周波数はすべてで異なるようにしても良い。さらに路側装置の数は必要に応じて適宜設定すれば良い。
Claims (6)
- 交差点における右折する車両の運転を支援する運転支援システムであって、
路側に設けられ、交差点の右折エリアにおける右折車の車両固有情報を取得する右折車情報取得手段と、
前記路側に設けられ、交差点における右折エリアの車両と通信可能な路側通信手段と、
前記路側に設けられ、前記右折車にとっての対向直進車の危険性の有無を判定する対向直進車危険性判定手段と、
車両に設けられ、前記路側通信手段と通信が可能な車両側通信手段と、
前記車両に設けられ、自車の前記車両側通信手段が前記路側通信手段との通信エリアに入ったときに自車の車両固有情報と方向指示情報とを、該車両側通信手段を介して前記路側通信手段に送信する車両固有情報送信手段と、
前記路側に設けられ、前記右折車情報取得手段で取得した車両固有情報と、前記車両固有情報送信手段により送信された車両固有情報とが一致し、且つ前記対向直進車危険性判定手段が対向直進車危険性有りと判定したときに、当該一致した車両固有情報を含んだ危険報知指令を前記路側通信手段から前記右折エリアに向け送信する危険情報通知手段と、
前記車両に設けられ、前記危険情報通知手段からの危険報知指令を受けたときには、前記一致した車両固有情報と自車の車両固有情報とが一致し且つ自車が右折方向指示状態であることを条件にドライバーに危険性有りを報知する報知制御手段と
を備えてなる運転支援システム。 - 前記路側通信手段及び車両側通信手段は、DSRC(Dedicated Short Range Communication「狭域通信」)方式であることを特徴とする請求項1に記載の運転支援システム。
- 前記右折車情報取得手段は、交差点の右折エリアを撮像する撮像手段を備え、この撮像手段の画像に基づいて右折車の車両固有情報を取得し、
前記対向直進車危険性判定手段は、前記右折車にとって対向直進エリアを撮像する撮像手段を備え、この撮像手段の画像に基づいて対向直進車危険性の有無を判定することを特徴とする請求項1又は2に記載の運転支援システム。 - 前記右折車情報取得手段と、前記対向直進車危険性判定手段とは、右折エリアと対向直進エリアとを含んだエリアを撮像可能な撮像手段を共通に使用していることを特徴とする請求項3に記載の運転支援システム。
- 前記右折車情報取得手段と、前記路側通信手段と、前記対向直進車危険性判定手段と、前記危険情報通知手段とで1つの路側装置を構成し、
当該路側装置を、交差点における右折可能走行路に応じた数で設け、
複数の路側装置が同時に動作するときには、当該複数の路側装置の路側通信手段の通信周波数を異ならせ、
前記車両側通信手段は、前記異なる通信周波数のいずれの通信周波数でも通信可能に構成されていることを特徴とする請求項1ないし4のいずれかに記載の運転支援システム。 - 各路側装置は、交差点の信号機の信号状況に応じて動作・停止することを特徴とする請求項5に記載の運転支援システム。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2007167594A JP4893500B2 (ja) | 2007-06-26 | 2007-06-26 | 運転支援システム |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2007167594A JP4893500B2 (ja) | 2007-06-26 | 2007-06-26 | 運転支援システム |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2009009208A true JP2009009208A (ja) | 2009-01-15 |
| JP4893500B2 JP4893500B2 (ja) | 2012-03-07 |
Family
ID=40324252
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2007167594A Expired - Fee Related JP4893500B2 (ja) | 2007-06-26 | 2007-06-26 | 運転支援システム |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP4893500B2 (ja) |
Cited By (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| WO2010082662A1 (ja) | 2009-01-19 | 2010-07-22 | 旭硝子株式会社 | 1,1-ジクロロ-2,2,3,3,3-ペンタフルオロプロパンの製造方法 |
| JP2011118519A (ja) * | 2009-12-01 | 2011-06-16 | Hitachi Kokusai Electric Inc | 衝突防止装置、衝突防止方法、衝突防止プログラム、および衝突防止システム |
| CN104200653A (zh) * | 2014-09-11 | 2014-12-10 | 吉林大学 | 一种基于车路协同的货车右转弯危险区域预警系统 |
| JPWO2020202367A1 (ja) * | 2019-03-29 | 2020-10-08 | ||
| WO2024080960A1 (en) * | 2022-12-28 | 2024-04-18 | Oyak Renault Otomobi̇l Fabri̇kalari Anoni̇m Şi̇rketi̇ | System for improving visibility at corners during turns |
Citations (7)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPS57117096A (en) * | 1981-01-10 | 1982-07-21 | Sumitomo Electric Industries | Traffic accident preventor |
| JP2001188927A (ja) * | 2000-01-04 | 2001-07-10 | Hitachi Ltd | 自動料金収受システム |
| JP2002133463A (ja) * | 2000-10-20 | 2002-05-10 | Nec Corp | 通行料課金装置およびその調整方法 |
| JP2002163766A (ja) * | 2000-11-27 | 2002-06-07 | Natl Inst For Land & Infrastructure Management Mlit | 路車間通信方式 |
| JP2002260193A (ja) * | 2001-03-05 | 2002-09-13 | Natl Inst For Land & Infrastructure Management Mlit | 右折運転支援装置 |
| JP2004252871A (ja) * | 2003-02-21 | 2004-09-09 | Matsushita Electric Ind Co Ltd | 方向変更支援システム |
| JP2005141543A (ja) * | 2003-11-07 | 2005-06-02 | Nissan Motor Co Ltd | 映像提供装置、情報提供システム、情報提供方法及び情報送信装置 |
-
2007
- 2007-06-26 JP JP2007167594A patent/JP4893500B2/ja not_active Expired - Fee Related
Patent Citations (7)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPS57117096A (en) * | 1981-01-10 | 1982-07-21 | Sumitomo Electric Industries | Traffic accident preventor |
| JP2001188927A (ja) * | 2000-01-04 | 2001-07-10 | Hitachi Ltd | 自動料金収受システム |
| JP2002133463A (ja) * | 2000-10-20 | 2002-05-10 | Nec Corp | 通行料課金装置およびその調整方法 |
| JP2002163766A (ja) * | 2000-11-27 | 2002-06-07 | Natl Inst For Land & Infrastructure Management Mlit | 路車間通信方式 |
| JP2002260193A (ja) * | 2001-03-05 | 2002-09-13 | Natl Inst For Land & Infrastructure Management Mlit | 右折運転支援装置 |
| JP2004252871A (ja) * | 2003-02-21 | 2004-09-09 | Matsushita Electric Ind Co Ltd | 方向変更支援システム |
| JP2005141543A (ja) * | 2003-11-07 | 2005-06-02 | Nissan Motor Co Ltd | 映像提供装置、情報提供システム、情報提供方法及び情報送信装置 |
Cited By (8)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| WO2010082662A1 (ja) | 2009-01-19 | 2010-07-22 | 旭硝子株式会社 | 1,1-ジクロロ-2,2,3,3,3-ペンタフルオロプロパンの製造方法 |
| JP2011118519A (ja) * | 2009-12-01 | 2011-06-16 | Hitachi Kokusai Electric Inc | 衝突防止装置、衝突防止方法、衝突防止プログラム、および衝突防止システム |
| CN104200653A (zh) * | 2014-09-11 | 2014-12-10 | 吉林大学 | 一种基于车路协同的货车右转弯危险区域预警系统 |
| JPWO2020202367A1 (ja) * | 2019-03-29 | 2020-10-08 | ||
| WO2020202367A1 (ja) * | 2019-03-29 | 2020-10-08 | 本田技研工業株式会社 | 情報提供装置、プログラムおよび情報提供方法 |
| CN113646817A (zh) * | 2019-03-29 | 2021-11-12 | 本田技研工业株式会社 | 信息提供装置、程序以及信息提供方法 |
| JP7223838B2 (ja) | 2019-03-29 | 2023-02-16 | 本田技研工業株式会社 | 情報提供装置、プログラムおよび情報提供方法 |
| WO2024080960A1 (en) * | 2022-12-28 | 2024-04-18 | Oyak Renault Otomobi̇l Fabri̇kalari Anoni̇m Şi̇rketi̇ | System for improving visibility at corners during turns |
Also Published As
| Publication number | Publication date |
|---|---|
| JP4893500B2 (ja) | 2012-03-07 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| US8902080B2 (en) | Vehicle-mounted narrow-band wireless communication apparatus and roadside-to-vehicle narrow-band wireless communication system | |
| US9836967B2 (en) | Method and traffic monitoring device for detecting a wrong-way driving incident of a motor vehicle | |
| JP5048829B2 (ja) | 運転支援システム | |
| JP6435994B2 (ja) | 車載装置 | |
| JP6168025B2 (ja) | 車両用交差点関連警報装置 | |
| JP2016517106A (ja) | 自動車の自動運行システム | |
| US20170154527A1 (en) | Apparatus and method for driving assistance | |
| KR102581766B1 (ko) | 차량 제어 장치, 차량 제어 방법 및 차량 제어 시스템 | |
| JP2013033324A (ja) | 周辺車両情報通知装置 | |
| JP2007219588A (ja) | 移動端末装置、交通情報システム、移動端末装置の交通情報抽出方法、移動端末装置の到着時間算出方法および交通情報処理方法 | |
| JPH11195196A (ja) | 車載情報提供装置 | |
| CN111016897A (zh) | 控制车辆驾驶的装置、方法和系统 | |
| US8849553B2 (en) | Road-installed driving supporting device, vehicle-mounted driving supporting device, and driving supporting system | |
| JP4893500B2 (ja) | 運転支援システム | |
| KR20140061180A (ko) | 차량간 통신을 통한 차로 위치 결정 장치 | |
| JP2010049442A (ja) | 車載通信装置 | |
| JP5338371B2 (ja) | 車両用警報装置 | |
| JP5924395B2 (ja) | 周辺車両情報通知装置 | |
| JP2010211301A (ja) | 事故予測通知装置、事故予測通知システム及び車載器 | |
| JP2016062443A (ja) | 運転支援装置 | |
| JP5892038B2 (ja) | 運転支援装置 | |
| JP2017111681A (ja) | 車線逸脱警報装置及び車線逸脱警報方法 | |
| JP2017224211A (ja) | 車両制御装置 | |
| JP4899493B2 (ja) | 車両用情報提供装置及び車線維持制御装置 | |
| WO2020136893A1 (ja) | 通信システム、通信端末、制御方法、プログラム、およびプログラムを記憶する記憶媒体 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20090730 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20110414 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20110419 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20110614 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20111122 |
|
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20111205 |
|
| R151 | Written notification of patent or utility model registration |
Ref document number: 4893500 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R151 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20150106 Year of fee payment: 3 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| LAPS | Cancellation because of no payment of annual fees |