JP2008237788A - 超音波撮像装置 - Google Patents
超音波撮像装置 Download PDFInfo
- Publication number
- JP2008237788A JP2008237788A JP2007086215A JP2007086215A JP2008237788A JP 2008237788 A JP2008237788 A JP 2008237788A JP 2007086215 A JP2007086215 A JP 2007086215A JP 2007086215 A JP2007086215 A JP 2007086215A JP 2008237788 A JP2008237788 A JP 2008237788A
- Authority
- JP
- Japan
- Prior art keywords
- opening width
- thickness direction
- imaging apparatus
- ultrasonic
- information
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Ceased
Links
- 238000003384 imaging method Methods 0.000 title claims abstract description 85
- 239000000523 sample Substances 0.000 claims abstract description 48
- 238000002347 injection Methods 0.000 claims description 3
- 239000007924 injection Substances 0.000 claims description 3
- 238000001574 biopsy Methods 0.000 abstract description 9
- 238000012360 testing method Methods 0.000 abstract 4
- 238000002604 ultrasonography Methods 0.000 abstract 1
- 230000005540 biological transmission Effects 0.000 description 19
- 238000010586 diagram Methods 0.000 description 13
- 238000003780 insertion Methods 0.000 description 5
- 230000037431 insertion Effects 0.000 description 5
- 239000006098 acoustic absorber Substances 0.000 description 3
- 238000006243 chemical reaction Methods 0.000 description 3
- 238000002592 echocardiography Methods 0.000 description 3
- 238000000034 method Methods 0.000 description 3
- 238000005452 bending Methods 0.000 description 2
- 230000003321 amplification Effects 0.000 description 1
- 238000003491 array Methods 0.000 description 1
- 230000007423 decrease Effects 0.000 description 1
- 230000001934 delay Effects 0.000 description 1
- 239000004973 liquid crystal related substance Substances 0.000 description 1
- 238000003199 nucleic acid amplification method Methods 0.000 description 1
- 230000001360 synchronised effect Effects 0.000 description 1
- 238000012285 ultrasound imaging Methods 0.000 description 1
Images







Classifications
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B17/00—Surgical instruments, devices or methods, e.g. tourniquets
- A61B17/34—Trocars; Puncturing needles
- A61B17/3403—Needle locating or guiding means
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B8/00—Diagnosis using ultrasonic, sonic or infrasonic waves
- A61B8/08—Detecting organic movements or changes, e.g. tumours, cysts, swellings
- A61B8/0833—Detecting organic movements or changes, e.g. tumours, cysts, swellings involving detecting or locating foreign bodies or organic structures
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01S—RADIO DIRECTION-FINDING; RADIO NAVIGATION; DETERMINING DISTANCE OR VELOCITY BY USE OF RADIO WAVES; LOCATING OR PRESENCE-DETECTING BY USE OF THE REFLECTION OR RERADIATION OF RADIO WAVES; ANALOGOUS ARRANGEMENTS USING OTHER WAVES
- G01S15/00—Systems using the reflection or reradiation of acoustic waves, e.g. sonar systems
- G01S15/88—Sonar systems specially adapted for specific applications
- G01S15/89—Sonar systems specially adapted for specific applications for mapping or imaging
- G01S15/8906—Short-range imaging systems; Acoustic microscope systems using pulse-echo techniques
- G01S15/8909—Short-range imaging systems; Acoustic microscope systems using pulse-echo techniques using a static transducer configuration
- G01S15/8915—Short-range imaging systems; Acoustic microscope systems using pulse-echo techniques using a static transducer configuration using a transducer array
- G01S15/8925—Short-range imaging systems; Acoustic microscope systems using pulse-echo techniques using a static transducer configuration using a transducer array the array being a two-dimensional transducer configuration, i.e. matrix or orthogonal linear arrays
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01S—RADIO DIRECTION-FINDING; RADIO NAVIGATION; DETERMINING DISTANCE OR VELOCITY BY USE OF RADIO WAVES; LOCATING OR PRESENCE-DETECTING BY USE OF THE REFLECTION OR RERADIATION OF RADIO WAVES; ANALOGOUS ARRANGEMENTS USING OTHER WAVES
- G01S15/00—Systems using the reflection or reradiation of acoustic waves, e.g. sonar systems
- G01S15/88—Sonar systems specially adapted for specific applications
- G01S15/89—Sonar systems specially adapted for specific applications for mapping or imaging
- G01S15/8906—Short-range imaging systems; Acoustic microscope systems using pulse-echo techniques
- G01S15/899—Combination of imaging systems with ancillary equipment
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01S—RADIO DIRECTION-FINDING; RADIO NAVIGATION; DETERMINING DISTANCE OR VELOCITY BY USE OF RADIO WAVES; LOCATING OR PRESENCE-DETECTING BY USE OF THE REFLECTION OR RERADIATION OF RADIO WAVES; ANALOGOUS ARRANGEMENTS USING OTHER WAVES
- G01S7/00—Details of systems according to groups G01S13/00, G01S15/00, G01S17/00
- G01S7/52—Details of systems according to groups G01S13/00, G01S15/00, G01S17/00 of systems according to group G01S15/00
- G01S7/52017—Details of systems according to groups G01S13/00, G01S15/00, G01S17/00 of systems according to group G01S15/00 particularly adapted to short-range imaging
- G01S7/52053—Display arrangements
- G01S7/52057—Cathode ray tube displays
- G01S7/5206—Two-dimensional coordinated display of distance and direction; B-scan display
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B18/00—Surgical instruments, devices or methods for transferring non-mechanical forms of energy to or from the body
- A61B18/04—Surgical instruments, devices or methods for transferring non-mechanical forms of energy to or from the body by heating
- A61B18/12—Surgical instruments, devices or methods for transferring non-mechanical forms of energy to or from the body by heating by passing a current through the tissue to be heated, e.g. high-frequency current
- A61B18/14—Probes or electrodes therefor
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B17/00—Surgical instruments, devices or methods, e.g. tourniquets
- A61B17/34—Trocars; Puncturing needles
- A61B17/3403—Needle locating or guiding means
- A61B2017/3413—Needle locating or guiding means guided by ultrasound
Landscapes
- Engineering & Computer Science (AREA)
- Physics & Mathematics (AREA)
- Health & Medical Sciences (AREA)
- Remote Sensing (AREA)
- Radar, Positioning & Navigation (AREA)
- Life Sciences & Earth Sciences (AREA)
- Acoustics & Sound (AREA)
- Surgery (AREA)
- General Physics & Mathematics (AREA)
- Computer Networks & Wireless Communication (AREA)
- Animal Behavior & Ethology (AREA)
- General Health & Medical Sciences (AREA)
- Public Health (AREA)
- Veterinary Medicine (AREA)
- Molecular Biology (AREA)
- Medical Informatics (AREA)
- Heart & Thoracic Surgery (AREA)
- Biomedical Technology (AREA)
- Nuclear Medicine, Radiotherapy & Molecular Imaging (AREA)
- Pathology (AREA)
- Biophysics (AREA)
- Radiology & Medical Imaging (AREA)
- Ultra Sonic Daignosis Equipment (AREA)
Abstract
【解決手段】2次元配列される圧電素子アレイ12を用いて、浅い焦点深度位置にある患部2の生検を行う際に、被検体1に刺入された穿刺針51が、撮像断面から厚み方向に外れBモード画像に表示されなくなる場合に、厚み方向開口幅切換手段およびが厚み方向開口幅設定手段により、所定時間の間、超音波の送受信における厚み方向の開口幅を最大にし、厚み方向の超音波ビーム92を厚いものとし、撮像断面内に穿刺針51を位置させ、Bモード画像53に穿刺針51がすべて表示される様にすることとし、穿刺針51の被検体1内での位置を確実に把握し、間違いの無い生検を行うことを実現させる。
【選択図】図8
Description
(実施の形態1)
rate)変換および画像表示の形状や位置制御等を行い、表示部106に出力する。ここで、画像表示制御部105は、複数のBモード画像情報を、表示部106に同時表示する制御も行う。例えば、画像表示制御部105は、Bモード処理部103から入力されたBモード画像情報を、一枚の断層画像情報をなすフレームごとに表示部106の異なる表示領域に出力することも行う。
(実施の形態2)
2 患部
10 超音波プローブ
11 アナログマルチプレクサ
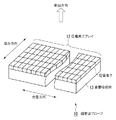
12 圧電素子アレイ
13 音響吸収材
20 焦点位置制御部
21 受信ビームフォーマ
22 送信ビームフォーマ
31 スキャン制御手段
32、62 厚み方向開口幅切換手段
41 スキャン情報入力手段
42 厚み方向開口幅設定手段
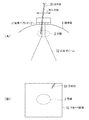
50 穿刺ガイドアタッチメント
51 穿刺針
52、53 Bモード画像
70,80、90 開口幅
71,81、91 焦点深度位置
72、82、92 超音波ビーム
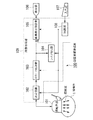
100 超音波撮像装置
101 探触子部
102 送受信部
103 Bモード処理部
104 シネメモリ部
105 画像表示制御部
106 表示部
107 入力部
108、118 制御部
109 画像取得部
Claims (10)
- 超音波の射出を行う射出方向と直交する面に、矩形状に2次元配列される圧電素子アレイを有する探触子部と、
前記探触子部を用いて、前記2次元配列の一方の配列方向である走査方向および前記射出方向を含む撮像断面を有するBモード画像情報を取得する画像取得部と、
前記画像取得部に前記Bモード画像情報の撮像条件を入力する入力部と、
前記Bモード画像情報を表示する表示部と、
を備える超音波撮像装置であって、
前記画像取得部は、前記2次元配列のもう一方の配列方向である厚み方向の前記射出を行う開口幅を切り換える厚み方向開口幅切換手段を有し、前記入力部は、前記厚み方向開口幅切換手段に前記切り換えを行う開口幅の開口幅情報を設定する厚み方向開口幅設定手段を有することを特徴とする超音波撮像装置。 - 前記開口幅情報は、前記厚み方向の最大開口幅を示す最大開口幅情報を備えることを特徴とする請求項1に記載の超音波撮像装置。
- 前記探触子部は、前記走査方向の端部から、前記撮像断面に沿って穿刺針を刺入させる穿刺ガイドアタッチメントを備えることを特徴とする請求項1または2に記載の超音波撮像装置。
- 前記厚み方向開口幅設定手段は、前記開口幅情報を、前記厚み方向の前記射出を行う圧電素子数で指定することを特徴とする請求項1ないし3のいずれか一つに記載の超音波撮像装置。
- 前記画像取得部は、前記開口幅の切り換えに同期して、前記厚み方向の焦点深度位置を変化させることを特徴とする請求項1ないし4のいずれか一つに記載の超音波撮像装置。
- 前記厚み方向開口幅切換手段は、前記撮像断面の画像を構成する一枚または複数枚のBモード画像情報の取得ごとに前記切り換えを行うことを特徴とする請求項1ないし5のいずれか一つに記載の超音波撮像装置。
- 前記厚み方向開口幅切換手段は、前記設定と同時に、初期設定された開口幅情報の開口幅から新たに設定された開口幅情報の開口幅に切り換えを行い、前記切り換えから所定時間を経過した後に、前記初期設定の開口幅情報の開口幅に再度切り換える厚み方向開口幅復元手段を備えることを特徴とする請求項1ないし6のいずれか一つに記載の超音波撮像装置。
- 前記厚み方向開口幅切換手段は、前記設定と同時に、初期設定された開口幅情報の開口幅および新たに設定された開口幅情報の開口幅を、交互に繰り返し切り換えることを特徴とする請求項1ないし6のいずれか一つに記載の超音波撮像装置。
- 前記画像取得部は、前記切り換えにより、厚み方向の開口幅が異なる2つのBモード画像情報を取得することを特徴とする請求項8に記載の超音波撮像装置。
- 前記表示部は、前記2つのBモード画像情報を同時に表示することを特徴とする請求項9に記載の超音波撮像装置。
Priority Applications (2)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2007086215A JP2008237788A (ja) | 2007-03-29 | 2007-03-29 | 超音波撮像装置 |
| US12/057,145 US20080242989A1 (en) | 2007-03-29 | 2008-03-27 | Ultrasonic imaging apparatus and method |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2007086215A JP2008237788A (ja) | 2007-03-29 | 2007-03-29 | 超音波撮像装置 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2008237788A true JP2008237788A (ja) | 2008-10-09 |
| JP2008237788A5 JP2008237788A5 (ja) | 2010-12-24 |
Family
ID=39795585
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2007086215A Ceased JP2008237788A (ja) | 2007-03-29 | 2007-03-29 | 超音波撮像装置 |
Country Status (2)
| Country | Link |
|---|---|
| US (1) | US20080242989A1 (ja) |
| JP (1) | JP2008237788A (ja) |
Cited By (7)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2012130564A (ja) * | 2010-12-22 | 2012-07-12 | Ge Medical Systems Global Technology Co Llc | 超音波診断装置 |
| JP2013063256A (ja) * | 2011-08-25 | 2013-04-11 | General Electric Co <Ge> | 医用超音波イメージングにおける針の視覚化を向上させる方法、装置及びシステム |
| JP2015226572A (ja) * | 2014-05-30 | 2015-12-17 | コニカミノルタ株式会社 | 超音波診断装置 |
| JP2016047191A (ja) * | 2014-08-28 | 2016-04-07 | コニカミノルタ株式会社 | 超音波探触子及び超音波診断装置 |
| JP2018033494A (ja) * | 2016-08-29 | 2018-03-08 | ゼネラル・エレクトリック・カンパニイ | 超音波画像表示装置及びその制御プログラム |
| JP2019500190A (ja) * | 2015-12-16 | 2019-01-10 | グロ−ティップ, エルエルシー | 変換器アレイの針追跡の方法および装置 |
| US10660616B2 (en) | 2015-03-10 | 2020-05-26 | Fujifilm Corporation | Acoustic wave image generating apparatus and control method thereof |
Families Citing this family (10)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2009261657A (ja) * | 2008-04-25 | 2009-11-12 | Ge Medical Systems Global Technology Co Llc | 超音波撮像装置 |
| WO2010111525A2 (en) * | 2009-03-25 | 2010-09-30 | Agee, John, M., Trustee Of The John M. Agee Trust Of August 15, 1996 | Treatment of carpal tunnel syndrome by injection of the flexor retinaculum |
| JP2013516288A (ja) * | 2010-01-07 | 2013-05-13 | ベラソン インコーポレイテッド | 血管アクセスデバイス、システムおよび方法 |
| DE102010016448A1 (de) * | 2010-04-14 | 2011-10-20 | Aesculap Ag | Orthopädisches Fixationssystem und Zielvorrichtung für ein derartiges Fixationssystem |
| JP5435751B2 (ja) * | 2011-03-03 | 2014-03-05 | 富士フイルム株式会社 | 超音波診断装置、超音波送受信方法、および超音波送受信プログラム |
| CN103169493A (zh) * | 2011-12-20 | 2013-06-26 | 通用电气公司 | 超声探针引导装置、方法及超声系统 |
| JP2014023670A (ja) * | 2012-07-26 | 2014-02-06 | Ge Medical Systems Global Technology Co Llc | 超音波診断装置及びその制御プログラム |
| CN103750866B (zh) * | 2014-01-25 | 2015-12-09 | 汕头市超声仪器研究所有限公司 | 一种超声多普勒效应脉管定位穿刺装置 |
| ES2527336B1 (es) * | 2014-02-11 | 2015-12-18 | Hospital Clínic De Barcelona | Dispositivo de guiado de aguja para punción ecoguiada y kit correspondiente |
| KR102373132B1 (ko) * | 2014-12-26 | 2022-03-11 | 삼성메디슨 주식회사 | 초음파 프로브 장치 및 초음파 촬영 장치 |
Citations (6)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH05277109A (ja) * | 1992-04-03 | 1993-10-26 | Fujitsu Ltd | 超音波診断装置 |
| JPH09135498A (ja) * | 1995-11-07 | 1997-05-20 | Olympus Optical Co Ltd | 超音波振動子エレメント |
| JPH1099329A (ja) * | 1996-09-26 | 1998-04-21 | Fujitsu Ltd | 超音波探触子および超音波診断装置 |
| JPH1142224A (ja) * | 1997-07-25 | 1999-02-16 | Fujitsu Ltd | 超音波診断装置 |
| JP2000279410A (ja) * | 1999-03-31 | 2000-10-10 | Ge Yokogawa Medical Systems Ltd | モード制御方法および超音波診断装置 |
| JP2005278918A (ja) * | 2004-03-30 | 2005-10-13 | Aloka Co Ltd | 超音波診断装置 |
Family Cites Families (20)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US4307613A (en) * | 1979-06-14 | 1981-12-29 | University Of Connecticut | Electronically focused ultrasonic transmitter |
| EP0090567B1 (en) * | 1982-03-20 | 1988-07-27 | Fujitsu Limited | Ultrasonic sector-scan probe |
| US4653000A (en) * | 1983-09-06 | 1987-03-24 | Kabushiki Kaisha Toshiba | Image signal-processing system based on synthetic aperture technique |
| US4945915A (en) * | 1987-02-20 | 1990-08-07 | Olympus Optical Co., Ltd. | Ultrasonic diagnosis apparatus |
| JP2789234B2 (ja) * | 1989-10-02 | 1998-08-20 | 株式会社日立メディコ | 超音波診断装置 |
| JP3090718B2 (ja) * | 1990-07-11 | 2000-09-25 | 株式会社東芝 | 超音波診断装置 |
| US5482046A (en) * | 1994-11-23 | 1996-01-09 | General Electric Company | Acoustic power control technique |
| JPH09526A (ja) * | 1995-06-22 | 1997-01-07 | Toshiba Corp | 超音波診断装置 |
| US5911221A (en) * | 1996-06-25 | 1999-06-15 | Siemens Medical Systems Inc. | Static scanhead switching along elevation for forming ultrasound beam line |
| US6279399B1 (en) * | 1998-08-03 | 2001-08-28 | Vingmed Sound A/S | Multi-dimensional transducer array apparatus |
| JP4377495B2 (ja) * | 1999-10-29 | 2009-12-02 | 株式会社東芝 | 超音波診断装置 |
| US6842401B2 (en) * | 2000-04-06 | 2005-01-11 | Teratech Corporation | Sonar beamforming system |
| US6468216B1 (en) * | 2000-08-24 | 2002-10-22 | Kininklijke Philips Electronics N.V. | Ultrasonic diagnostic imaging of the coronary arteries |
| US6524247B2 (en) * | 2001-05-15 | 2003-02-25 | U-Systems, Inc. | Method and system for ultrasound imaging of a biopsy needle |
| JP2003290228A (ja) * | 2002-03-29 | 2003-10-14 | Ge Medical Systems Global Technology Co Llc | 2次元アレイ超音波探触子の駆動方法および超音波診断装置 |
| JP3967950B2 (ja) * | 2002-04-10 | 2007-08-29 | ジーイー・メディカル・システムズ・グローバル・テクノロジー・カンパニー・エルエルシー | 穿刺針案内具、超音波プローブおよび超音波撮影装置 |
| US6629929B1 (en) * | 2002-11-08 | 2003-10-07 | Koninklijke Philips Electronics N.V. | Method and apparatus for automatically setting the transmit aperture and apodization of an ultrasound transducer array |
| US7280435B2 (en) * | 2003-03-06 | 2007-10-09 | General Electric Company | Switching circuitry for reconfigurable arrays of sensor elements |
| US7846103B2 (en) * | 2004-09-17 | 2010-12-07 | Medical Equipment Diversified Services, Inc. | Probe guide for use with medical imaging systems |
| WO2007133881A2 (en) * | 2006-05-12 | 2007-11-22 | Koninklijke Philips Electronics, N.V. | Incoherent retrospective dynamic transmit focusing |
-
2007
- 2007-03-29 JP JP2007086215A patent/JP2008237788A/ja not_active Ceased
-
2008
- 2008-03-27 US US12/057,145 patent/US20080242989A1/en not_active Abandoned
Patent Citations (6)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH05277109A (ja) * | 1992-04-03 | 1993-10-26 | Fujitsu Ltd | 超音波診断装置 |
| JPH09135498A (ja) * | 1995-11-07 | 1997-05-20 | Olympus Optical Co Ltd | 超音波振動子エレメント |
| JPH1099329A (ja) * | 1996-09-26 | 1998-04-21 | Fujitsu Ltd | 超音波探触子および超音波診断装置 |
| JPH1142224A (ja) * | 1997-07-25 | 1999-02-16 | Fujitsu Ltd | 超音波診断装置 |
| JP2000279410A (ja) * | 1999-03-31 | 2000-10-10 | Ge Yokogawa Medical Systems Ltd | モード制御方法および超音波診断装置 |
| JP2005278918A (ja) * | 2004-03-30 | 2005-10-13 | Aloka Co Ltd | 超音波診断装置 |
Cited By (7)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2012130564A (ja) * | 2010-12-22 | 2012-07-12 | Ge Medical Systems Global Technology Co Llc | 超音波診断装置 |
| JP2013063256A (ja) * | 2011-08-25 | 2013-04-11 | General Electric Co <Ge> | 医用超音波イメージングにおける針の視覚化を向上させる方法、装置及びシステム |
| JP2015226572A (ja) * | 2014-05-30 | 2015-12-17 | コニカミノルタ株式会社 | 超音波診断装置 |
| JP2016047191A (ja) * | 2014-08-28 | 2016-04-07 | コニカミノルタ株式会社 | 超音波探触子及び超音波診断装置 |
| US10660616B2 (en) | 2015-03-10 | 2020-05-26 | Fujifilm Corporation | Acoustic wave image generating apparatus and control method thereof |
| JP2019500190A (ja) * | 2015-12-16 | 2019-01-10 | グロ−ティップ, エルエルシー | 変換器アレイの針追跡の方法および装置 |
| JP2018033494A (ja) * | 2016-08-29 | 2018-03-08 | ゼネラル・エレクトリック・カンパニイ | 超音波画像表示装置及びその制御プログラム |
Also Published As
| Publication number | Publication date |
|---|---|
| US20080242989A1 (en) | 2008-10-02 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP2008237788A (ja) | 超音波撮像装置 | |
| JP5808325B2 (ja) | 超音波診断装置及び超音波診断装置の作動方法 | |
| CN114364325B (zh) | 超声波诊断装置及超声波诊断装置的控制方法 | |
| JP2012081134A (ja) | 超音波診断装置 | |
| US10349916B2 (en) | Ultrasound diagnostic apparatus and ultrasound image display method | |
| JP5954786B2 (ja) | 超音波診断装置及び画像データの表示制御プログラム | |
| US20090082674A1 (en) | Ultrasound diagnostic apparatus | |
| JP2013226335A (ja) | 音響波診断装置および画像表示方法 | |
| JP6933031B2 (ja) | 超音波探触子及び超音波診断装置 | |
| JP2006314689A (ja) | 超音波診断装置及び超音波診断装置制御プログラム | |
| JP2005342194A (ja) | 超音波診断装置 | |
| JP2010099467A (ja) | 体腔用超音波プローブ及び超音波診断装置 | |
| JP4266611B2 (ja) | 超音波プローブ、超音波内視鏡、及び超音波診断装置 | |
| JP6705180B2 (ja) | 超音波診断装置 | |
| JP4488288B2 (ja) | 超音波画像診断装置 | |
| JP2017225645A (ja) | 超音波画像表示装置及び方法、並びにプログラムを格納した記録媒体 | |
| JP2005324072A (ja) | 超音波診断装置 | |
| JP4820565B2 (ja) | 超音波診断装置 | |
| JP6880958B2 (ja) | 超音波診断装置および超音波探触子 | |
| JP5317395B2 (ja) | 超音波診断装置および超音波診断画像表示方法 | |
| JP6379363B1 (ja) | 超音波画像表示装置 | |
| JP2005168766A (ja) | 超音波プローブ | |
| JP5836071B2 (ja) | 超音波プローブ及び超音波診断装置 | |
| JP2007215921A (ja) | 超音波診断装置及び超音波プローブ | |
| JPWO2019026115A1 (ja) | 超音波画像表示装置 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A625 | Written request for application examination (by other person) |
Free format text: JAPANESE INTERMEDIATE CODE: A625 Effective date: 20100118 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20101108 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20111219 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20111222 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20120314 |
|
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20120625 |
|
| A045 | Written measure of dismissal of application [lapsed due to lack of payment] |
Free format text: JAPANESE INTERMEDIATE CODE: A045 Effective date: 20121029 |