JP2008009868A - 画像処理装置 - Google Patents
画像処理装置 Download PDFInfo
- Publication number
- JP2008009868A JP2008009868A JP2006181633A JP2006181633A JP2008009868A JP 2008009868 A JP2008009868 A JP 2008009868A JP 2006181633 A JP2006181633 A JP 2006181633A JP 2006181633 A JP2006181633 A JP 2006181633A JP 2008009868 A JP2008009868 A JP 2008009868A
- Authority
- JP
- Japan
- Prior art keywords
- image
- work
- image processing
- setting
- processing apparatus
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Granted
Links
Images




Landscapes
- Image Processing (AREA)
- Image Analysis (AREA)
Abstract
【解決手段】画像処理装置1は、画像処理を行う画像処理部15を備えており、監視カメラ2で撮影した画像に監視対象物の切出、抽象化処理を施して処理画像を作成する。処理画像に対して膨張及び収縮処理等を施して最大及び最小画像を作成し、基準画像として予め画像メモリ16に記憶し、作業監視時には、実作業の画像から取得した処理画像と基準画像を比較し、処理画像が対象物の正規動作に基づくものか(画像同士が適合するか)否かを判定する。適合する場合には次の実作業の処理画像を取得して次の基準画像と比較し、適合しない場合には警告装置5により警告を発する。この判定条件、判定結果に応じた各処理の設定は記憶部17に記憶される。
【選択図】 図1
Description
また、特許文献2に記載されたものでは、曲げ加工装置において、加工装置に設置した撮影手段で加工部品を撮影し、その撮影画像を予め記憶した基準画像と比較して両者のズレを算出し、そのズレ量を修正して加工部品を正確に加工するよう加工装置を監視する。
請求項2の発明は、請求項1に記載された画像処理装置において、前記切り出し処理された正規の動作に基づく対象物の画像の少なくとも一部に対して膨張処理を施す膨張手段及び/又は収縮処理を施す収縮手段を備え、前記膨張手段が前記第1の画像を作成し、前記収縮手段が前記第2の画像を作成することを特徴とする。
請求項3の発明は、請求項1又は2に記載された画像処理装置において、前記比較手段は、前記対象物の画像と前記基準画像とを比較すべき比較エリアを設定する比較エリア設定手段、又は、前記比較エリア以外のマスクエリアを設定するマスクエリア設定手段により設定された前記比較エリア内で前記比較を行うことを特徴とする。
請求項4の発明は、請求項1ないし3のいずれかに記載された画像処理装置において、前記判定手段は、前記対象物の画像及び前記基準画像の有する色情報に基づいて、前記判定を行う色判定手段を有することを特徴とする。
この画像処理装置は、上記した各画像処理装置と同様に、例えば工場で作業工程を監視する装置、或いは監視カメラで不審者や異常を監視する装置等、取り込んだ画像に画像処理を施して監視対象物の動きを監視又は管理等するためのものであり、以下では、組立ラインで作業者の作業(作業工程)を監視する画像処理装置を例に採り説明する。
この画像処理装置1は、図示のように、装置本体10と、装置本体10にインターフェース等を介して接続された監視カメラ2、入力装置3、モニタ4、及び警告装置5等を備えている。
また、画像メモリ16は、画像処理部15から出力される処理画像16Aや基準画像16B、及び監視エリアに動物体等の監視対象物がない状態で監視カメラ2により撮影して取得した、監視エリアの背景画像16C等の画像データを記憶する。
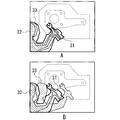
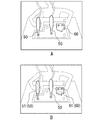
なお、図3では、作業者20が、スパナ21によりワーク22に取り付けられたボルト23を締める作業の例を示す。また、図3B、Cにおいて点線で示す部分は、説明のために表示したものであり、実際はモニタ4に表示されず、かつ比較や記憶の対象とはならない(以下の各図でも同様である)。
一方、この膨張画像を最大画像として記憶しないときは(S105、No)、マウスによる範囲の修正又は膨張処理の繰り返し(S106)により膨張画像に修正を加える。これら各ステップ(S104からS106)を繰り返して最大画像(図3Cの太線で囲まれた領域)31を作成し、画像メモリ16(図1参照)の記憶部16Bに基準画像として設定・記憶する(S105、Yes)。
一方、この収縮画像を最小画像として記憶しないときは(S108、No)、マウスによる範囲の修正または収縮処理の繰り返し(S109)により収縮画像に修正を加える。これら各ステップ(S107からS109)を繰り返して最小画像(図3Cの格子状のハッチング領域)32を作成し、画像メモリ16(図1参照)の記憶部16Bに基準画像として設定・記憶し(S108、Yes)、基準画像の設定処理を終了する(S110)。
図4Aに示す例では、実作業(監視対象物)の処理画像33(図の斜線状のハッチング領域)全体が、作業工程上許容される範囲である最大画像31(図の太線で囲まれた領域)の内部にあり、かつ作業工程上必ず含まれる範囲である最小画像32(図の格子状のハッチング領域)全体を内部に含んでいる。そのため、この例では、処理画像33が基準画像に適合すると判定され、正常に作業が行われたと判断される。一方、図4Bに示す例では、作業者は他の位置にあるボルトを締める作業に取り掛かっており、処理画像33が最大画像31の外部にはみ出し、又は最小画像32に処理画像33により含まれない部分が生じているため、処理画像33が基準画像に適合しないと判定される。この場合には、判定部15Hは、作業間違い等の異常が生じたと判断し、警告装置5により警告を発して作業者等に異常を報知する警告処理等を行う。
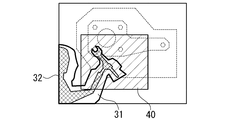
上記した制御部14(図1参照)は、装置1全体の制御に関する情報処理や演算処理等を行うとともに、比較エリアを設定する比較エリア設定部14Aを備えており、入力装置3から入力された比較エリアの設定情報に基づいて比較エリアを画定する座標位置等の設定処理を行う。この比較エリアの設定は、例えば基準画像の設定に続けて行われ、図5に示すように、モニタ4の表示画像に対してマウスにより操作して比較エリア40(図の斜線で示す領域)となる画像領域の外周を画定することで設定される。比較エリア40が設定された場合には、判定部15Hは、比較エリア40内の各画像31〜33のみを比較して判定を行うが、このとき、比較エリア40以外の不要なエリアをマスクし、この設定されたマスクエリア内の各画像31〜33を比較の対象から除外して判定するようにしてもよい。
図6は、作業工程の監視を開始する前に行う準備処理に関する流れを示すフローチャートである。
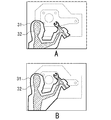
この画像例は、複数のボルトを順番に締める作業の基準画像であり、最初のチェックポイント1の基準画像は、既に説明した図3Cに示す画像であり、最大画像31と最小画像32からなる。次のチェックポイント2の基準画像は、図7Aに示すように、他の位置のボルトを締める状態を表す各画像31、32からなり、更に次のチェックポイント3の基準画像は、図7Bに示すように、3つ目のボルトを締める状態を表す各画像31、32からなる。このように、全てのチェックポイント毎に基準画像等を設定した後、実際の作業工程の監視を開始する。
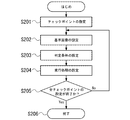
作業工程の監視時には、実作業中の画像から監視対象物(判定対象画像)を切り出して抽象化処理した処理画像を、順次リアルタイムでチェックポイントの基準画像と比較していき、各チェックポイントまで進行したか否かを判定して作業工程を監視する。具体的には、まず、実作業の画像から監視対象物の処理画像を取得し(S301)、取得した処理画像がチェックポイント1の対象物の正規の動作に基づくものか否か(基準画像に適合するか否か)が判定部15Hにより判定される(S302)。その結果、適合しないと判定された場合(S302、No)には、処理画像がチェックポイント2の基準画像と適合するか否かが判定される(S303)。ここで適合すると判定された場合(S303、Yes)には、作業工程異常(作業順序の間違え)が生じたと判定し、実行処理設定データ17Bに予め記憶された設定(以下、実行処理設定という)に基づいて、所定の処理、例えば警告処理を実行して警告装置5を作動させ、判定結果を表示して作業者に警告を発する(S304)。
図9は、ネジ締め及び部品の取り付けを監視する場合の例を模式的に示す画像例である。
Claims (4)
- 対象物の画像を取り込む画像取込手段を備え、該画像取込手段により取り込んだ画像に基づいて、前記対象物の画像が正規の動作に基づくものかどうかを判定する画像処理装置であって、
前記画像取込手段により取り込まれた画像から判定対象である前記対象物の画像を切り出し処理する切出手段と、
前記対象物の正規の動作に基づく基準画像を、前記対象物の最大動作範囲を示す第1の画像及び/又は最小動作範囲を示す第2の画像で設定する基準画像設定手段と、
該設定された基準画像の第1の画像及び/又は第2の画像を記憶する記憶手段と、
切り出し処理された前記対象物の画像と予め記憶された前記基準画像の第1の画像及び/又は第2の画像とを比較する比較手段と、
該比較手段の比較結果に基づいて、前記対象物の画像が該対象物の正規の動作に基づくものか否かを判定する判定手段と、
該判定結果に応じた処理を設定する設定手段と、
前記判定結果に基づいて、前記設定手段により予め設定された処理を実行する処理実行手段と、
を備えたことを特徴とする画像処理装置。 - 請求項1に記載された画像処理装置において、
前記切り出し処理された正規の動作に基づく対象物の画像の少なくとも一部に対して膨張処理を施す膨張手段及び/又は収縮処理を施す収縮手段を備え、前記膨張手段が前記第1の画像を作成し、前記収縮手段が前記第2の画像を作成することを特徴とする画像処理装置。 - 請求項1又は2に記載された画像処理装置において、
前記比較手段は、前記対象物の画像と前記基準画像とを比較すべき比較エリアを設定する比較エリア設定手段、又は、前記比較エリア以外のマスクエリアを設定するマスクエリア設定手段により設定された前記比較エリア内で前記比較を行うことを特徴とする画像処理装置。 - 請求項1ないし3のいずれかに記載された画像処理装置において、
前記判定手段は、前記対象物の画像及び前記基準画像の有する色情報に基づいて、前記判定を行う色判定手段を有することを特徴とする画像処理装置。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2006181633A JP4784752B2 (ja) | 2006-06-30 | 2006-06-30 | 画像処理装置 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2006181633A JP4784752B2 (ja) | 2006-06-30 | 2006-06-30 | 画像処理装置 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2008009868A true JP2008009868A (ja) | 2008-01-17 |
| JP4784752B2 JP4784752B2 (ja) | 2011-10-05 |
Family
ID=39067993
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2006181633A Expired - Fee Related JP4784752B2 (ja) | 2006-06-30 | 2006-06-30 | 画像処理装置 |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP4784752B2 (ja) |
Cited By (37)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2010049636A (ja) * | 2008-08-25 | 2010-03-04 | Pfu Ltd | 情報処理装置、透過表示要素制御方法およびプログラム |
| JP2010224749A (ja) * | 2009-03-23 | 2010-10-07 | Daihen Corp | 作業工程管理システム |
| WO2010123138A1 (ja) * | 2009-04-24 | 2010-10-28 | Mizuno Yoshiro | 監視システム |
| JP2013000851A (ja) * | 2011-06-20 | 2013-01-07 | Sanyo Mach Works Ltd | 締付作業支援装置および締付作業支援方法 |
| JP2013145422A (ja) * | 2012-01-13 | 2013-07-25 | Panasonic Corp | 作業検知システムの設定方法及びそれを用いた作業検知システム |
| JP2015099022A (ja) * | 2013-11-18 | 2015-05-28 | 東芝三菱電機産業システム株式会社 | 作業確認システム |
| WO2015185974A1 (ja) * | 2014-06-04 | 2015-12-10 | パナソニックIpマネジメント株式会社 | 制御装置及びそれを用いた作業管理システム |
| JP2017091009A (ja) * | 2015-11-04 | 2017-05-25 | 日本電気株式会社 | 異常作業検出システムおよび異常作業検出方法 |
| JP2017220017A (ja) * | 2016-06-07 | 2017-12-14 | いすゞ自動車株式会社 | 作業検査装置及び作業検査方法 |
| JP2018045669A (ja) * | 2016-09-12 | 2018-03-22 | 沖電気工業株式会社 | 生産ナビゲーションシステム、そのサポートシステム、及び、データ管理方法 |
| JP2018149677A (ja) * | 2018-07-03 | 2018-09-27 | パナソニックIpマネジメント株式会社 | 制御装置及びそれを用いた作業管理システム |
| JP2018173957A (ja) * | 2017-03-30 | 2018-11-08 | 新日本建工株式会社 | 安全管理システム |
| JP2019101549A (ja) * | 2017-11-29 | 2019-06-24 | 沖電気工業株式会社 | 作業現場監視装置およびプログラム |
| JP2019144861A (ja) * | 2018-02-21 | 2019-08-29 | 中国電力株式会社 | 安全判定装置、安全判定システム、安全判定方法 |
| JP2019188599A (ja) * | 2018-07-03 | 2019-10-31 | パナソニックIpマネジメント株式会社 | 制御装置及びそれを用いた作業管理システム |
| JP2020102245A (ja) * | 2020-03-05 | 2020-07-02 | 日本電気株式会社 | 異常作業検出システムおよび異常作業検出方法 |
| JP2021002136A (ja) * | 2019-06-20 | 2021-01-07 | 株式会社日立製作所 | 作業支援装置、作業支援方法、および作業支援プログラム |
| JP2021152979A (ja) * | 2017-10-30 | 2021-09-30 | Necフィールディング株式会社 | 作業支援装置、作業支援方法及びプログラム |
| JP2021154486A (ja) * | 2019-06-07 | 2021-10-07 | パナソニックIpマネジメント株式会社 | 制御装置 |
| JP2022031303A (ja) * | 2020-03-05 | 2022-02-18 | 日本電気株式会社 | 異常作業検出システム、異常作業検出方法、および異常作業検出プログラム |
| JP2022522159A (ja) * | 2019-04-19 | 2022-04-14 | ナノトロニクス イメージング インコーポレイテッド | 組立てラインのための組立てエラー修正 |
| WO2022141961A1 (zh) * | 2020-12-30 | 2022-07-07 | 南京灵雀智能制造有限公司 | 一种便于同步作业的流水装配线计量显示系统 |
| US11503171B2 (en) | 2019-04-08 | 2022-11-15 | Konica Minolta, Inc. | Inspection system, inspection method, and inspection program |
| JP2022174971A (ja) * | 2021-05-12 | 2022-11-25 | 五洋建設株式会社 | コンクリート締固め作業解析装置、解析方法及びプログラム |
| JP2022178773A (ja) * | 2021-05-21 | 2022-12-02 | Necプラットフォームズ株式会社 | 画像監視装置、方法及びプログラム |
| JP2023075113A (ja) * | 2021-11-30 | 2023-05-30 | 日本電気株式会社 | 異常作業検出システム、異常作業検出方法、および異常作業検出プログラム |
| US11675330B2 (en) | 2019-02-28 | 2023-06-13 | Nanotronics Imaging, Inc. | System and method for improving assembly line processes |
| US11703824B2 (en) | 2019-02-28 | 2023-07-18 | Nanotronics Imaging, Inc. | Assembly error correction for assembly lines |
| EP4151369A4 (en) * | 2020-05-15 | 2023-08-30 | Panasonic Intellectual Property Management Co., Ltd. | Tool system, tool, reference image generation method, and program |
| US12111922B2 (en) | 2020-02-28 | 2024-10-08 | Nanotronics Imaging, Inc. | Method, systems and apparatus for intelligently emulating factory control systems and simulating response data |
| US12111923B2 (en) | 2019-10-08 | 2024-10-08 | Nanotronics Imaging, Inc. | Dynamic monitoring and securing of factory processes, equipment and automated systems |
| US12153668B2 (en) | 2019-11-20 | 2024-11-26 | Nanotronics Imaging, Inc. | Securing industrial production from sophisticated attacks |
| US12153411B2 (en) | 2019-06-24 | 2024-11-26 | Nanotronics Imaging, Inc. | Predictive process control for a manufacturing process |
| US12153408B2 (en) | 2019-11-06 | 2024-11-26 | Nanotronics Imaging, Inc. | Systems, methods, and media for manufacturing processes |
| US12153401B2 (en) | 2019-11-06 | 2024-11-26 | Nanotronics Imaging, Inc. | Systems, methods, and media for manufacturing processes |
| US12155673B2 (en) | 2019-12-19 | 2024-11-26 | Nanotronics Imaging, Inc. | Dynamic monitoring and securing of factory processes, equipment and automated systems |
| US12165353B2 (en) | 2019-11-06 | 2024-12-10 | Nanotronics Imaging, Inc. | Systems, methods, and media for manufacturing processes |
Citations (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH09147108A (ja) * | 1995-11-17 | 1997-06-06 | Hitachi Zosen Corp | 印字文字の検査方法および検査装置 |
| JP2005250990A (ja) * | 2004-03-05 | 2005-09-15 | Mitsubishi Electric Corp | 作業支援装置 |
| JP2006026240A (ja) * | 2004-07-20 | 2006-02-02 | Konami Co Ltd | ゲーム装置、コンピュータの制御方法及びプログラム |
-
2006
- 2006-06-30 JP JP2006181633A patent/JP4784752B2/ja not_active Expired - Fee Related
Patent Citations (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH09147108A (ja) * | 1995-11-17 | 1997-06-06 | Hitachi Zosen Corp | 印字文字の検査方法および検査装置 |
| JP2005250990A (ja) * | 2004-03-05 | 2005-09-15 | Mitsubishi Electric Corp | 作業支援装置 |
| JP2006026240A (ja) * | 2004-07-20 | 2006-02-02 | Konami Co Ltd | ゲーム装置、コンピュータの制御方法及びプログラム |
Cited By (55)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2010049636A (ja) * | 2008-08-25 | 2010-03-04 | Pfu Ltd | 情報処理装置、透過表示要素制御方法およびプログラム |
| JP2010224749A (ja) * | 2009-03-23 | 2010-10-07 | Daihen Corp | 作業工程管理システム |
| WO2010123138A1 (ja) * | 2009-04-24 | 2010-10-28 | Mizuno Yoshiro | 監視システム |
| JP2010258729A (ja) * | 2009-04-24 | 2010-11-11 | Yoshiro Mizuno | 画像・音声監視システム |
| JP2013000851A (ja) * | 2011-06-20 | 2013-01-07 | Sanyo Mach Works Ltd | 締付作業支援装置および締付作業支援方法 |
| JP2013145422A (ja) * | 2012-01-13 | 2013-07-25 | Panasonic Corp | 作業検知システムの設定方法及びそれを用いた作業検知システム |
| JP2015099022A (ja) * | 2013-11-18 | 2015-05-28 | 東芝三菱電機産業システム株式会社 | 作業確認システム |
| JP2015229210A (ja) * | 2014-06-04 | 2015-12-21 | パナソニックIpマネジメント株式会社 | 制御装置及びそれを用いた作業管理システム |
| TWI552094B (zh) * | 2014-06-04 | 2016-10-01 | 松下知識產權經營股份有限公司 | 控制裝置及利用其之作業管理系統 |
| US11964370B2 (en) | 2014-06-04 | 2024-04-23 | Panasonic Intellectual Property Management Co., Ltd. | Control device and work management system using same |
| WO2015185974A1 (ja) * | 2014-06-04 | 2015-12-10 | パナソニックIpマネジメント株式会社 | 制御装置及びそれを用いた作業管理システム |
| US11247317B2 (en) | 2014-06-04 | 2022-02-15 | Panasonic Intellectual Property Management Co., Ltd. | Control device and work management system using same |
| JP2017091009A (ja) * | 2015-11-04 | 2017-05-25 | 日本電気株式会社 | 異常作業検出システムおよび異常作業検出方法 |
| JP2017220017A (ja) * | 2016-06-07 | 2017-12-14 | いすゞ自動車株式会社 | 作業検査装置及び作業検査方法 |
| JP2018045669A (ja) * | 2016-09-12 | 2018-03-22 | 沖電気工業株式会社 | 生産ナビゲーションシステム、そのサポートシステム、及び、データ管理方法 |
| JP7139570B2 (ja) | 2016-09-12 | 2022-09-21 | 沖電気工業株式会社 | 生産ナビゲーションシステム |
| JP2018173957A (ja) * | 2017-03-30 | 2018-11-08 | 新日本建工株式会社 | 安全管理システム |
| JP2021152979A (ja) * | 2017-10-30 | 2021-09-30 | Necフィールディング株式会社 | 作業支援装置、作業支援方法及びプログラム |
| JP7156731B2 (ja) | 2017-10-30 | 2022-10-19 | Necフィールディング株式会社 | 作業支援装置、作業支援方法及びプログラム |
| JP7114885B2 (ja) | 2017-11-29 | 2022-08-09 | 沖電気工業株式会社 | 作業現場監視装置およびプログラム |
| JP2022103189A (ja) * | 2017-11-29 | 2022-07-07 | 沖電気工業株式会社 | 作業現場監視装置、作業現場監視システム、作業現場監視方法およびプログラム |
| JP2019101549A (ja) * | 2017-11-29 | 2019-06-24 | 沖電気工業株式会社 | 作業現場監視装置およびプログラム |
| JP2019144861A (ja) * | 2018-02-21 | 2019-08-29 | 中国電力株式会社 | 安全判定装置、安全判定システム、安全判定方法 |
| JP2018149677A (ja) * | 2018-07-03 | 2018-09-27 | パナソニックIpマネジメント株式会社 | 制御装置及びそれを用いた作業管理システム |
| JP2019188599A (ja) * | 2018-07-03 | 2019-10-31 | パナソニックIpマネジメント株式会社 | 制御装置及びそれを用いた作業管理システム |
| US12140926B2 (en) | 2019-02-28 | 2024-11-12 | Nanotronics Imaging, Inc. | Assembly error correction for assembly lines |
| US11675330B2 (en) | 2019-02-28 | 2023-06-13 | Nanotronics Imaging, Inc. | System and method for improving assembly line processes |
| US11703824B2 (en) | 2019-02-28 | 2023-07-18 | Nanotronics Imaging, Inc. | Assembly error correction for assembly lines |
| US11503171B2 (en) | 2019-04-08 | 2022-11-15 | Konica Minolta, Inc. | Inspection system, inspection method, and inspection program |
| JP7207790B2 (ja) | 2019-04-19 | 2023-01-18 | ナノトロニクス イメージング インコーポレイテッド | 組立てラインのための組立てエラー修正 |
| JP2022522159A (ja) * | 2019-04-19 | 2022-04-14 | ナノトロニクス イメージング インコーポレイテッド | 組立てラインのための組立てエラー修正 |
| JP2021154486A (ja) * | 2019-06-07 | 2021-10-07 | パナソニックIpマネジメント株式会社 | 制御装置 |
| JP2023063352A (ja) * | 2019-06-07 | 2023-05-09 | パナソニックIpマネジメント株式会社 | 作業管理システム |
| JP7248516B2 (ja) | 2019-06-20 | 2023-03-29 | 株式会社日立製作所 | 作業支援装置、作業支援方法、および作業支援プログラム |
| JP2021002136A (ja) * | 2019-06-20 | 2021-01-07 | 株式会社日立製作所 | 作業支援装置、作業支援方法、および作業支援プログラム |
| US12153411B2 (en) | 2019-06-24 | 2024-11-26 | Nanotronics Imaging, Inc. | Predictive process control for a manufacturing process |
| US12153412B2 (en) | 2019-06-24 | 2024-11-26 | Nanotronics Imaging, Inc. | Predictive process control for a manufacturing process |
| US12449792B2 (en) | 2019-06-24 | 2025-10-21 | Nanotronics Imaging, Inc. | Predictive process control for a manufacturing process |
| US12111923B2 (en) | 2019-10-08 | 2024-10-08 | Nanotronics Imaging, Inc. | Dynamic monitoring and securing of factory processes, equipment and automated systems |
| US12153408B2 (en) | 2019-11-06 | 2024-11-26 | Nanotronics Imaging, Inc. | Systems, methods, and media for manufacturing processes |
| US12165353B2 (en) | 2019-11-06 | 2024-12-10 | Nanotronics Imaging, Inc. | Systems, methods, and media for manufacturing processes |
| US12153401B2 (en) | 2019-11-06 | 2024-11-26 | Nanotronics Imaging, Inc. | Systems, methods, and media for manufacturing processes |
| US12153668B2 (en) | 2019-11-20 | 2024-11-26 | Nanotronics Imaging, Inc. | Securing industrial production from sophisticated attacks |
| US12155673B2 (en) | 2019-12-19 | 2024-11-26 | Nanotronics Imaging, Inc. | Dynamic monitoring and securing of factory processes, equipment and automated systems |
| US12111922B2 (en) | 2020-02-28 | 2024-10-08 | Nanotronics Imaging, Inc. | Method, systems and apparatus for intelligently emulating factory control systems and simulating response data |
| JP7235094B2 (ja) | 2020-03-05 | 2023-03-08 | 日本電気株式会社 | 異常作業検出システム、異常作業検出方法、および異常作業検出プログラム |
| JP2020102245A (ja) * | 2020-03-05 | 2020-07-02 | 日本電気株式会社 | 異常作業検出システムおよび異常作業検出方法 |
| JP2022031303A (ja) * | 2020-03-05 | 2022-02-18 | 日本電気株式会社 | 異常作業検出システム、異常作業検出方法、および異常作業検出プログラム |
| EP4151369A4 (en) * | 2020-05-15 | 2023-08-30 | Panasonic Intellectual Property Management Co., Ltd. | Tool system, tool, reference image generation method, and program |
| US12299788B2 (en) | 2020-05-15 | 2025-05-13 | Panasonic Intellectual Property Management Co., Ltd. | Tool system, tool, method for generating reference image, and program |
| WO2022141961A1 (zh) * | 2020-12-30 | 2022-07-07 | 南京灵雀智能制造有限公司 | 一种便于同步作业的流水装配线计量显示系统 |
| JP2022174971A (ja) * | 2021-05-12 | 2022-11-25 | 五洋建設株式会社 | コンクリート締固め作業解析装置、解析方法及びプログラム |
| JP7663411B2 (ja) | 2021-05-12 | 2025-04-16 | 五洋建設株式会社 | コンクリート締固め作業解析装置、解析方法及びプログラム |
| JP2022178773A (ja) * | 2021-05-21 | 2022-12-02 | Necプラットフォームズ株式会社 | 画像監視装置、方法及びプログラム |
| JP2023075113A (ja) * | 2021-11-30 | 2023-05-30 | 日本電気株式会社 | 異常作業検出システム、異常作業検出方法、および異常作業検出プログラム |
Also Published As
| Publication number | Publication date |
|---|---|
| JP4784752B2 (ja) | 2011-10-05 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP4784752B2 (ja) | 画像処理装置 | |
| JP6700661B2 (ja) | 画像処理装置、画像処理方法、及び画像処理システム | |
| JP5930708B2 (ja) | 作業管理装置および作業管理システム | |
| CN110389558A (zh) | 控制装置和控制系统 | |
| US10984523B2 (en) | Seam inspection apparatus | |
| JP2015196231A (ja) | ねじ締付け装置 | |
| JP6596530B2 (ja) | 方法及び装置 | |
| US20190099902A1 (en) | Robot system | |
| US20240153069A1 (en) | Method and arrangement for testing the quality of an object | |
| US20190373164A1 (en) | Task-assistance control apparatus and task-image control apparatus | |
| JP2011073876A (ja) | ピッキング動作検出システム及びピッキング動作検出方法並びにピッキング動作検出プログラム | |
| JP7336253B2 (ja) | 据付物の施工方法 | |
| JP2008217608A (ja) | 産業機械の遠隔監視システム及び方法 | |
| WO2016157484A1 (ja) | 作業指示システム | |
| US20230359182A1 (en) | Work management apparatus | |
| JP7170493B2 (ja) | 締め付け確認システム、及び当該締め付け確認システムを用いた方法 | |
| EP2545421B1 (en) | Method and device for securing operation of automatic or autonomous equipment | |
| JP2021041500A (ja) | 作業監視システム | |
| JP2024091156A (ja) | 画像検査装置、画像検査方法、及び画像検査システム | |
| CN116977922A (zh) | 一种搭载云服务器的车间工人检测系统 | |
| WO2022249249A1 (ja) | 映像解析装置、映像解析システム、及び記憶媒体 | |
| US20260027707A1 (en) | Robot control device, robot system, and robot control program | |
| JP2007010419A (ja) | 対象物の3次元形状検証システム。 | |
| JP2014117757A (ja) | ロボット制御システムおよびロボット制御方法 | |
| US20240354927A1 (en) | Operation monitoring method |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20081022 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20110302 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20110328 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20110527 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20110615 |
|
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20110628 |
|
| R150 | Certificate of patent or registration of utility model |
Ref document number: 4784752 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 Free format text: JAPANESE INTERMEDIATE CODE: R150 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20140722 Year of fee payment: 3 |
|
| S111 | Request for change of ownership or part of ownership |
Free format text: JAPANESE INTERMEDIATE CODE: R313111 |
|
| R350 | Written notification of registration of transfer |
Free format text: JAPANESE INTERMEDIATE CODE: R350 |
|
| LAPS | Cancellation because of no payment of annual fees |