JP2007292856A - 画像形成装置、現像剤の消費量算出方法及びプログラム - Google Patents
画像形成装置、現像剤の消費量算出方法及びプログラム Download PDFInfo
- Publication number
- JP2007292856A JP2007292856A JP2006117978A JP2006117978A JP2007292856A JP 2007292856 A JP2007292856 A JP 2007292856A JP 2006117978 A JP2006117978 A JP 2006117978A JP 2006117978 A JP2006117978 A JP 2006117978A JP 2007292856 A JP2007292856 A JP 2007292856A
- Authority
- JP
- Japan
- Prior art keywords
- weighting factor
- image
- light beam
- main scanning
- developer
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Pending
Links
Images









Landscapes
- Control Or Security For Electrophotography (AREA)
Abstract
【課題】 回転多面鏡よりなる偏向器を用いた主走査手段の特性に依存する露光状態の変動を考慮し、高精度に現像剤の消費量を算出する。
【解決手段】 重み係数選択部56は、反射面位置検出部51により出力される反射面位置データ(画像の書込みに用いている回転多面鏡の反射面を特定するデータ)をもとに、予め反射面の反射係数、面倒れ角度等の特性と関連付けて重み係数設定テーブル57に格納されている、最適値を与える重み係数を取得し、これを現像剤消費量演算部58が演算に用いる重み係数として設定する。現像剤の消費量は、感光体の走査露光に用いる画像データと、露光状態によって変更される重み係数とに基づいて演算され、高精度に現像剤消費量を算出することが可能になる。
【選択図】 図6
【解決手段】 重み係数選択部56は、反射面位置検出部51により出力される反射面位置データ(画像の書込みに用いている回転多面鏡の反射面を特定するデータ)をもとに、予め反射面の反射係数、面倒れ角度等の特性と関連付けて重み係数設定テーブル57に格納されている、最適値を与える重み係数を取得し、これを現像剤消費量演算部58が演算に用いる重み係数として設定する。現像剤の消費量は、感光体の走査露光に用いる画像データと、露光状態によって変更される重み係数とに基づいて演算され、高精度に現像剤消費量を算出することが可能になる。
【選択図】 図6
Description
本発明は、画像データにより点灯制御されるLD光源が発する光ビームにより感光体を走査露光し、生成される潜像をトナーにより現像する電子写真方式の画像形成装置に関し、より詳細には、上記の画像形成プロセスにおけるトナー消費量を精度良く算出する手段を備えた画像形成装置及びトナー消費量の算出方法に関する。
電子写真方式により画像形成を行うプリンタ、複写機等の画像形成装置では、画像形成プロセスに用いるトナーを含む現像部周りの部品は、従来から、交換部品(プロセスカートリッジ)として、ユーザによる交換を可能とする方式が採用されている。
プロセスカートリッジ交換方式では、使用しているカートリッジが使用限界に近づき、画質が劣化する前の適切な時期に交換できるようにすることが必要になるので、トナー消費量を管理するようにしている。
また、トナー消費量は、形成される画像濃度等の画質を安定化させる制御を行うためにも、管理される。
上記のように、トナー消費量に相当する量を管理し、制御に用いる従来技術の例として、下記特許文献1,2を挙げることができる。
特許文献1(特開2005−3904号公報)には、原稿の画像データから、トナー使用量に当たる画素数を積算し、他方、感光体上に現像したパッチ画像を別に用意した光学装置で読取り、得た読取値と、算出された画素数から、制御目標値を決定する濃度制御手段を備えた画像形成装置が記載されている。
また、特許文献2(特開2005−4049号公報)には、再利用できるプロセスパーツを持ったプロセスカートリッジにおいて、画像信号によって印字が行われた量に当たる印字量情報を履歴として管理し、プロセスパーツの再利用時に、印字量情報に基づいて該パーツの制御値を設定するようにした画像形成装置が記載されている。ここでは、印字量情報として、感光体を露光している時間または露光していない時間のいずれか一方の時間をカウントしたカウント情報とするか、または画像信号によって印字されるドット数をカウントしたカウント値情報とすることが、記載されている。
特開2005−3904号公報
特開2005−4049号公報
プロセスカートリッジ交換方式では、使用しているカートリッジが使用限界に近づき、画質が劣化する前の適切な時期に交換できるようにすることが必要になるので、トナー消費量を管理するようにしている。
また、トナー消費量は、形成される画像濃度等の画質を安定化させる制御を行うためにも、管理される。
上記のように、トナー消費量に相当する量を管理し、制御に用いる従来技術の例として、下記特許文献1,2を挙げることができる。
特許文献1(特開2005−3904号公報)には、原稿の画像データから、トナー使用量に当たる画素数を積算し、他方、感光体上に現像したパッチ画像を別に用意した光学装置で読取り、得た読取値と、算出された画素数から、制御目標値を決定する濃度制御手段を備えた画像形成装置が記載されている。
また、特許文献2(特開2005−4049号公報)には、再利用できるプロセスパーツを持ったプロセスカートリッジにおいて、画像信号によって印字が行われた量に当たる印字量情報を履歴として管理し、プロセスパーツの再利用時に、印字量情報に基づいて該パーツの制御値を設定するようにした画像形成装置が記載されている。ここでは、印字量情報として、感光体を露光している時間または露光していない時間のいずれか一方の時間をカウントしたカウント情報とするか、または画像信号によって印字されるドット数をカウントしたカウント値情報とすることが、記載されている。
しかしながら、上記特許文献1,2に例示される従来技術は、画素数や露光時間を計測しているに過ぎないので、感光体上の露光ビームの広がり、露光ビームにより感光体上に生成されるドット同士の重なり等の画像形成内容による変動要素を考慮した計測がなされておらず、現像剤の消費量を正確に検知、判定することができない。
そこで、本件の出願人は、先に特願2005−326650号(以下「先行技術」という)を提案した。
この先行技術には、入力された画像に対応した値を持つ印刷ドットの配列で表される発光制御信号の走査ライン情報と、注目ドット及び注目ドットに近接する1つ以上のドットに1対1に対応する重み係数にもとづいて、主走査と副走査方向に近接するドットとの重なりを考慮し、画像形成内容に応じた演算を行うことにより、高精度な現像剤の消費量の算出を可能とする方法が記載されている。
そこで、本件の出願人は、先に特願2005−326650号(以下「先行技術」という)を提案した。
この先行技術には、入力された画像に対応した値を持つ印刷ドットの配列で表される発光制御信号の走査ライン情報と、注目ドット及び注目ドットに近接する1つ以上のドットに1対1に対応する重み係数にもとづいて、主走査と副走査方向に近接するドットとの重なりを考慮し、画像形成内容に応じた演算を行うことにより、高精度な現像剤の消費量の算出を可能とする方法が記載されている。
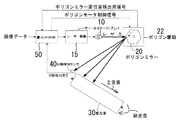
ところで、画像データに対応した値を持つドットの配列で表される発光制御信号によりLDを制御し、発する光ビームを主・副2次元走査し、露光する画像形成方式では、光ビームの主走査手段に、回転多面鏡(ポリゴンミラー)よりなる偏向器を用いた主走査手段を用いること(図1、参照)が一般的である。
ここで用いる回転多面鏡は、各反射面を露光走査に用いるので、均一な特性が各面に求められるが、実際には、各面の反射係数のばらつきは避けられない。光源から同一光量のビームを出射しても、異なる反射係数を持つ反射面によって偏向されることで、感光体上のビームスポットによる露光量が異なる結果となり、反射面によって現像剤の消費量が異なってしまう。
また、回転多面鏡20の各反射面の角度もわずかな誤差を持ち、図2に示すように、反射面 mと反射面 m+1の面倒れ角度が、面毎にそれぞれ異なる角度θ1とθ2をなす。
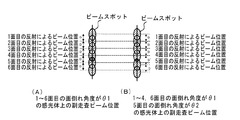
図3は、面倒れ角度の異同による走査光ビームへの影響を説明する図である。図3の(A)側のビームスポット列は、反射面の面倒れ角度θが、全て同一の理想状態にある場合の各反射面により投射された各スポットの位置を示す。この副走査方向のスポット列にビームピッチ間隔は、全部Dとなり誤差は生じない。
他方、図3の(B)側のビームスポット列は、反射面の面倒れ角度θが、一部異なる場合の各反射面により投射された各スポットの位置を示す。この副走査方向のスポット列にビームピッチ間隔は、5面目の面倒れ角度だけが異なっているために、5面目により投射されたスポットがあるべき位置よりずれ、このずれによって、この部分の副走査ビームピッチ間隔がD´になって、他のスポットの間隔Dと異なる。このスポットの位置ずれにより、図3(B)に斜線部で表すビーム重ね合せ部分が、図3(A)の場合と異なる結果となり、現像剤の消費量が異なってしまう。
ここで用いる回転多面鏡は、各反射面を露光走査に用いるので、均一な特性が各面に求められるが、実際には、各面の反射係数のばらつきは避けられない。光源から同一光量のビームを出射しても、異なる反射係数を持つ反射面によって偏向されることで、感光体上のビームスポットによる露光量が異なる結果となり、反射面によって現像剤の消費量が異なってしまう。
また、回転多面鏡20の各反射面の角度もわずかな誤差を持ち、図2に示すように、反射面 mと反射面 m+1の面倒れ角度が、面毎にそれぞれ異なる角度θ1とθ2をなす。
図3は、面倒れ角度の異同による走査光ビームへの影響を説明する図である。図3の(A)側のビームスポット列は、反射面の面倒れ角度θが、全て同一の理想状態にある場合の各反射面により投射された各スポットの位置を示す。この副走査方向のスポット列にビームピッチ間隔は、全部Dとなり誤差は生じない。
他方、図3の(B)側のビームスポット列は、反射面の面倒れ角度θが、一部異なる場合の各反射面により投射された各スポットの位置を示す。この副走査方向のスポット列にビームピッチ間隔は、5面目の面倒れ角度だけが異なっているために、5面目により投射されたスポットがあるべき位置よりずれ、このずれによって、この部分の副走査ビームピッチ間隔がD´になって、他のスポットの間隔Dと異なる。このスポットの位置ずれにより、図3(B)に斜線部で表すビーム重ね合せ部分が、図3(A)の場合と異なる結果となり、現像剤の消費量が異なってしまう。
また、主走査手段を構成する走査光学系は、ポリゴンミラーの回転により、ミラー面に投射される光ビームを直線走査させることから、露光面上を走査するビームスポット径が主走査方向の位置によって変動する特性を持つ。
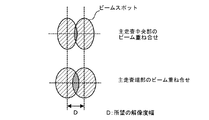
即ち、図4に示すように、露光面における中央位置のビームスポットの主走査幅に対して、端位置のビームスポットの主走査幅が大きくなる傾向で、露光面にわたってビームスポット径が変動し、一定の露光状態が得られない。
このビームスポット径の変動は、図5に示すように、主走査方向のビームが重なる範囲(図5の斜線部)の面積を異ならせることになり、主走査方向の位置によって、現像剤の消費量が異なることになる。
また上記した変動要素を抑えて、ビームスポット径の変動をなくしたとしても、ビームピッチ間隔を狭くして解像度を上げると、ビームが重なる範囲の面積が大きくなり、現像剤の現像量が異なる傾向がより顕著に現われる。
このように、回転多面鏡よりなる偏向器を用いた主走査手段の特性に依存して露光状態が変動するが、上記した従来技術及び先行技術の方法は、この露光状態の変動を考慮していないので、現像剤の消費量を精度良く算出することができない。
本発明は、上記従来技術及び先行技術の現像剤の消費量算出方法における問題に鑑みてなされたものであり、その解決すべき課題は、回転多面鏡よりなる偏向器を用いた主走査手段の特性に依存する露光状態の変動を考慮し、より高精度な現像剤の消費量算出を当該画像形成方式において実現することにある。
即ち、図4に示すように、露光面における中央位置のビームスポットの主走査幅に対して、端位置のビームスポットの主走査幅が大きくなる傾向で、露光面にわたってビームスポット径が変動し、一定の露光状態が得られない。
このビームスポット径の変動は、図5に示すように、主走査方向のビームが重なる範囲(図5の斜線部)の面積を異ならせることになり、主走査方向の位置によって、現像剤の消費量が異なることになる。
また上記した変動要素を抑えて、ビームスポット径の変動をなくしたとしても、ビームピッチ間隔を狭くして解像度を上げると、ビームが重なる範囲の面積が大きくなり、現像剤の現像量が異なる傾向がより顕著に現われる。
このように、回転多面鏡よりなる偏向器を用いた主走査手段の特性に依存して露光状態が変動するが、上記した従来技術及び先行技術の方法は、この露光状態の変動を考慮していないので、現像剤の消費量を精度良く算出することができない。
本発明は、上記従来技術及び先行技術の現像剤の消費量算出方法における問題に鑑みてなされたものであり、その解決すべき課題は、回転多面鏡よりなる偏向器を用いた主走査手段の特性に依存する露光状態の変動を考慮し、より高精度な現像剤の消費量算出を当該画像形成方式において実現することにある。
請求項1の発明は、点灯が制御可能であり、点灯時に光ビームを出力する発光源と、前記発光源から出力される光ビームを回転多面鏡よりなる偏向器によって主走査方向に偏向し、周期走査させる主走査手段と、前記主走査手段により周期走査される光ビームにより露光される感光体と、前記感光体を該光ビームの主走査方向に交わる方向に変位させる副走査手段と、前記主走査手段及び副走査手段の動作とタイミングをとって、前記発光源を画像データにより点灯制御し、出力する光ビームで前記感光体を露光し、感光体に潜像を形成する画像露光手段と、前記画像露光手段により前記感光体に形成された潜像に現像剤を付着させ、可視像を生成する現像手段を有する画像形成装置において、点灯制御に用いる画像データに対応した値を持つドットの配列で表される点灯制御用の走査ラインデータと、該走査ラインデータにおける注目ドットと近接ドットの位置関係の違いに対応して設定される現像剤消費量算出用の重み係数とに基づいて、現像剤の消費量を算出する消費量算出手段と、前記感光体の走査露光に用いる前記主走査手段の特性を表す情報を取得する特性情報取得手段と、前記特性情報取得手段によって取得した主走査手段の特性に応じて、前記消費量算出手段に用いる重み係数を設定する重み係数設定手段を備えたことを特徴とし、このようにすることによって上記課題を解決するものである。
請求項2の発明は、請求項1に記載された画像形成装置において、前記特性情報取得手段が、光ビームを周期走査させる際、各周期走査に用いる回転多面鏡の反射面を特定し、特定された反射面それぞれに対応する反射係数を取得する手段であり、前記重み係数設定手段は、反射係数に対応して予め用意された重み係数から、該当する反射係数に応じた重み係数を設定する手段であることを特徴とし、このようにすることによって上記課題を解決するものである。
請求項3の発明は、請求項1に記載された画像形成装置において、前記特性情報取得手段が、光ビームを周期走査させる際、各周期走査に用いる回転多面鏡の反射面を特定し、特定された反射面それぞれに対応する面倒れ角度を取得する手段であり、前記重み係数設定手段は、面倒れ角度に対応して予め用意された重み係数から、該当する面倒れ角度に応じた重み係数を設定する手段であることを特徴とし、このようにすることによって上記課題を解決するものである。
請求項4の発明は、請求項1に記載された画像形成装置において、前記特性情報取得手段が、光ビームを周期走査させる際、各周期走査に用いる回転多面鏡の反射面を特定し、特定された反射面それぞれに対応する反射係数及び面倒れ角度を取得する手段であり、前記重み係数設定手段は、反射係数及び面倒れ角度に対応して予め用意された重み係数から、該当する反射係数及び面倒れ角度に応じた重み係数を設定する手段であることを特徴とし、このようにすることによって上記課題を解決するものである。
請求項3の発明は、請求項1に記載された画像形成装置において、前記特性情報取得手段が、光ビームを周期走査させる際、各周期走査に用いる回転多面鏡の反射面を特定し、特定された反射面それぞれに対応する面倒れ角度を取得する手段であり、前記重み係数設定手段は、面倒れ角度に対応して予め用意された重み係数から、該当する面倒れ角度に応じた重み係数を設定する手段であることを特徴とし、このようにすることによって上記課題を解決するものである。
請求項4の発明は、請求項1に記載された画像形成装置において、前記特性情報取得手段が、光ビームを周期走査させる際、各周期走査に用いる回転多面鏡の反射面を特定し、特定された反射面それぞれに対応する反射係数及び面倒れ角度を取得する手段であり、前記重み係数設定手段は、反射係数及び面倒れ角度に対応して予め用意された重み係数から、該当する反射係数及び面倒れ角度に応じた重み係数を設定する手段であることを特徴とし、このようにすることによって上記課題を解決するものである。
請求項5の発明は、請求項1に記載された画像形成装置において、前記特性情報取得手段が、光ビームの各周期走査において、感光体を露光する光ビームのスポット径の主走査方向に生じる変動を取得する手段であり、前記重み係数設定手段は、光ビームのスポット径の主走査方向に生じる変動に対応して予め用意された重み係数から、該当する変動に応じた重み係数を設定する手段であることを特徴とし、このようにすることによって上記課題を解決するものである。
請求項6の発明は、請求項1に記載された画像形成装置において、前記特性情報取得手段が、光ビームを周期走査させる際、各周期走査に用いる回転多面鏡の反射面を特定し、特定された反射面それぞれに対応する反射係数及び面倒れ角度を取得すると同時に、光ビームの各周期走査において、感光体を露光する光ビームのスポット径の主走査方向に生じる変動を取得する手段であり、前記重み係数設定手段は、反射係数、面倒れ角度及び光ビームのスポット径の主走査方向に生じる変動、に対応して予め用意された重み係数から、該当する、反射係数、面倒れ角度及び光ビームのスポット径の主走査方向に生じる変動、に応じた重み係数を設定する手段であることを特徴とし、このようにすることによって上記課題を解決するものである。
請求項7の発明は、請求項5又は6に記載された画像形成装置において、前記特性情報取得手段により取得されるスポット径の主走査方向に生じる変動が、主走査方向をエリア分割し、分割したエリアごとに1つの値を対応させる方式により、与えられることを特徴とし、このようにすることによって上記課題を解決するものである。
請求項6の発明は、請求項1に記載された画像形成装置において、前記特性情報取得手段が、光ビームを周期走査させる際、各周期走査に用いる回転多面鏡の反射面を特定し、特定された反射面それぞれに対応する反射係数及び面倒れ角度を取得すると同時に、光ビームの各周期走査において、感光体を露光する光ビームのスポット径の主走査方向に生じる変動を取得する手段であり、前記重み係数設定手段は、反射係数、面倒れ角度及び光ビームのスポット径の主走査方向に生じる変動、に対応して予め用意された重み係数から、該当する、反射係数、面倒れ角度及び光ビームのスポット径の主走査方向に生じる変動、に応じた重み係数を設定する手段であることを特徴とし、このようにすることによって上記課題を解決するものである。
請求項7の発明は、請求項5又は6に記載された画像形成装置において、前記特性情報取得手段により取得されるスポット径の主走査方向に生じる変動が、主走査方向をエリア分割し、分割したエリアごとに1つの値を対応させる方式により、与えられることを特徴とし、このようにすることによって上記課題を解決するものである。
請求項8の発明は、請求項1乃至7のいずれかに記載された画像形成装置における前記消費量算出手段、前記特性情報取得手段及び前記重み係数設定手段として機能させるためのプログラムを画像形成装置に搭載したコンピュータで駆動することによって、上記課題を解決するものである。
請求項9の発明は、発光源から出力される光ビームを回転多面鏡よりなる偏向器を用いた主走査手段によって主走査方向に偏向し、周期走査させる主走査工程、感光体を光ビームの主走査方向に交わる方向に変位させる副走査工程、主走査及び副走査とタイミングをとって、発光源を画像データにより点灯制御し、出力する光ビームで感光体を露光し、感光体に潜像を形成する画像露光工程、感光体に形成された潜像に現像剤を付着させ、可視像を生成する現像工程、の各工程よりなる画像形成工程によって、消費される現像剤を算出する現像剤の消費量算出方法において、点灯制御に用いる画像データに対応した値を持つドットの配列で表される点灯制御用の走査ラインデータと、該走査ラインデータにおける注目ドットと近接ドットの位置関係の違いに対応して設定される現像剤消費量算出用の重み係数とに基づいて、現像剤の消費量を算出する消費量算出工程と、前記感光体の走査露光に用いる前記偏向手段の特性を表す情報を取得する特性情報取得工程と、前記特性情報取得工程によって取得した偏向手段の特性に応じて、前記消費量算出工程に用いる重み係数を設定する重み係数設定工程と、を行うことを特徴とし、このようにすることによって上記課題を解決するものである。
請求項10の発明は、請求項9に記載された消費量算出方法において、前記特性情報取得工程が、光ビームを周期走査させる際、各周期走査に用いる回転多面鏡の反射面を特定し、特定された反射面それぞれに対応する反射係数を取得する工程であり、前記重み係数設定工程手段は、反射係数に対応して予め用意された重み係数から、該当する反射係数に応じた重み係数を設定する工程であることを特徴とし、このようにすることによって上記課題を解決するものである。
請求項11の発明は、請求項9に記載された消費量算出方法において、前記特性情報取得工程が、光ビームを周期走査させる際、各周期走査に用いる回転多面鏡の反射面を特定し、特定された反射面それぞれに対応する面倒れ角度を取得する工程であり、前記重み係数設定工程手段は、面倒れ角度に対応して予め用意された重み係数から、該当する面倒れ角度に応じた重み係数を設定する工程であることを特徴とし、このようにすることによって上記課題を解決するものである。
請求項12の発明は、請求項9に記載された消費量算出方法において、前記特性情報取得工程が、光ビームの各周期走査において、感光体を露光する光ビームのスポット径の主走査方向に生じる変動を取得する工程であり、前記重み係数設定工程手段は、光ビームのスポット径の主走査方向に生じる変動に対応して予め用意された重み係数から、該当する変動に応じた重み係数を設定する工程であることを特徴とし、このようにすることによって上記課題を解決するものである。
請求項11の発明は、請求項9に記載された消費量算出方法において、前記特性情報取得工程が、光ビームを周期走査させる際、各周期走査に用いる回転多面鏡の反射面を特定し、特定された反射面それぞれに対応する面倒れ角度を取得する工程であり、前記重み係数設定工程手段は、面倒れ角度に対応して予め用意された重み係数から、該当する面倒れ角度に応じた重み係数を設定する工程であることを特徴とし、このようにすることによって上記課題を解決するものである。
請求項12の発明は、請求項9に記載された消費量算出方法において、前記特性情報取得工程が、光ビームの各周期走査において、感光体を露光する光ビームのスポット径の主走査方向に生じる変動を取得する工程であり、前記重み係数設定工程手段は、光ビームのスポット径の主走査方向に生じる変動に対応して予め用意された重み係数から、該当する変動に応じた重み係数を設定する工程であることを特徴とし、このようにすることによって上記課題を解決するものである。
本発明によると、従来技術及び先行技術に提案された現像剤の消費量算出方法において考慮していなかった、回転多面鏡を用いた光ビーム偏向手段における反射面の反射係数、面倒れ角度及び光ビームのスポット径の変動を加味したことにより、消費量をより高い精度で算出することが可能になる。延いては、精度上の必要性から、従来用いていた現像剤残量検知用センサを不要にし、より最適な量の現像剤供給によるランニングタイムの延長を可能とする。さらに、より高精度な現像剤使用状況や、現像剤補給や交換時期のより正確な情報を提供し、過多或いは過少な現像剤を供給することが無く、最適な量の現像剤供給ができるので、形成する画像品質が向上し、廃トナー量の検知精度も向上する、といった効果が得られる。
また、主走査方向をエリア分割し、分割したエリアごとに代表値を対応させるようにしたので、スポット径の主走査方向に生じる変動値を保存、管理する手段の規模を縮小することが可能になる(請求項7)。
また、プログラムにより、消費量算出、主走査手段の特性情報の取得及び重み係数設定機能を装備するようにしたので、容易に機能実現手段を構成することが可能になる(請求項8)。
また、主走査方向をエリア分割し、分割したエリアごとに代表値を対応させるようにしたので、スポット径の主走査方向に生じる変動値を保存、管理する手段の規模を縮小することが可能になる(請求項7)。
また、プログラムにより、消費量算出、主走査手段の特性情報の取得及び重み係数設定機能を装備するようにしたので、容易に機能実現手段を構成することが可能になる(請求項8)。
本発明に係わる実施形態を以下に説明する。
図1は、本発明の画像形成装置の概略構成を示す。
図1に示す画像形成装置は、感光体を周期走査される光ビームにより露光し、形成される潜像を現像剤(トナー)により現像する、所謂電子写真方式で画像を形成する装置で、本発明に関連する要部を示すものである。
図1に示す装置における光ビームの出力系は、書込み制御部50、レーザー駆動部15、LD10よりなる。
書込み制御部50は、プリント出力の要求時に、前段の画像処理部(不図示)から受取る画像データをもとに、所定のタイミングで、発光源としてのLD10を点灯するための制御用データをレーザー駆動部15に入力する。書込み制御部50が出力する点灯制御用データは、画像データに対応した値を持つドットの配列で表されるデータで、LDドライバ19は、この点灯制御用データを受けて、LD10に駆動信号を供給し、LD10を点灯する。LD10により発光した光は、光ビームとして出力される。LD10は、同時に複数ビームによる書込みを可能とする場合、複数の光源を持つLDアレイを用いる。
光ビーム走査系は、ポリゴンモータを駆動源として持つ駆動部22により回転される回転多面鏡(ポリゴンミラー)20を偏向器として持つ。回転多面鏡20は、駆動部(ポリゴンモータ)22によって一定の回転が与えられ、回転により順次切替わるミラー面に投射されるLD10からの出力光ビームを周期走査する。光ビーム走査系により周期走査される光ビームは、主走査方向に感光体ドラム30の感光面を一定速度で走査し、ライン画像を潜像として生成する。
なお、後述する後述する現像剤消費量の算出に必要なデータとして、各周期のライン画像の走査に用いる回転多面鏡の反射面を特定するデータを取得する必要があり、このための信号を駆動部22からか書込み制御部50に出力する。また、駆動部22のポリゴンモータは制御可能で、解像度を変えるときには、ポリゴンモータの回転速度を変更する。
同期検知センサ40は、主走査光路で光ビームを検知し、同期信号を発生する。書込み制御部50は、同期検知センサ40からの同期信号を基準にして、各ライン画像を一定のタイミングで書込むことにより、感光体ドラム30上の主走査方向の画像位置を合わせる。光ビームの走査位置は、主走査カウント部のカウント値により検知し、上記書込みタイミング制御や後述する現像剤消費量の算出に用いる。
図1は、本発明の画像形成装置の概略構成を示す。
図1に示す画像形成装置は、感光体を周期走査される光ビームにより露光し、形成される潜像を現像剤(トナー)により現像する、所謂電子写真方式で画像を形成する装置で、本発明に関連する要部を示すものである。
図1に示す装置における光ビームの出力系は、書込み制御部50、レーザー駆動部15、LD10よりなる。
書込み制御部50は、プリント出力の要求時に、前段の画像処理部(不図示)から受取る画像データをもとに、所定のタイミングで、発光源としてのLD10を点灯するための制御用データをレーザー駆動部15に入力する。書込み制御部50が出力する点灯制御用データは、画像データに対応した値を持つドットの配列で表されるデータで、LDドライバ19は、この点灯制御用データを受けて、LD10に駆動信号を供給し、LD10を点灯する。LD10により発光した光は、光ビームとして出力される。LD10は、同時に複数ビームによる書込みを可能とする場合、複数の光源を持つLDアレイを用いる。
光ビーム走査系は、ポリゴンモータを駆動源として持つ駆動部22により回転される回転多面鏡(ポリゴンミラー)20を偏向器として持つ。回転多面鏡20は、駆動部(ポリゴンモータ)22によって一定の回転が与えられ、回転により順次切替わるミラー面に投射されるLD10からの出力光ビームを周期走査する。光ビーム走査系により周期走査される光ビームは、主走査方向に感光体ドラム30の感光面を一定速度で走査し、ライン画像を潜像として生成する。
なお、後述する後述する現像剤消費量の算出に必要なデータとして、各周期のライン画像の走査に用いる回転多面鏡の反射面を特定するデータを取得する必要があり、このための信号を駆動部22からか書込み制御部50に出力する。また、駆動部22のポリゴンモータは制御可能で、解像度を変えるときには、ポリゴンモータの回転速度を変更する。
同期検知センサ40は、主走査光路で光ビームを検知し、同期信号を発生する。書込み制御部50は、同期検知センサ40からの同期信号を基準にして、各ライン画像を一定のタイミングで書込むことにより、感光体ドラム30上の主走査方向の画像位置を合わせる。光ビームの走査位置は、主走査カウント部のカウント値により検知し、上記書込みタイミング制御や後述する現像剤消費量の算出に用いる。
また、感光体ドラム30は、モータにより回転駆動され、この回転により、感光体ドラム30上の光ビームの走査位置が変わる。即ち、光ビームは副走査され、主走査ラインの位置は副走査方向に移動する。感光体ドラム30は、回転速度が変動すると、主走査ライン間隔が変わってしまうので、画像書込中は一定回転速度が必要になる。なお、感光体ドラム30の回転速度を変更すると、解像度を変えることができる。
書込み制御部50は、転写紙の搬送にタイミングを合わせて、発生される書込みのスタート信号を基準にして、副走査方向の画像位置を定める副走査ゲート信号を生成し、ゲート期間にライン画像を書込む。ライン位置は、副走査カウント部のカウント値により検知し、書込みタイミング制御や後述する現像剤消費量の算出に用いる。
書込み制御部50は、書込み制御及び書込みに関連する処理を実行するためのCPUと、制御データ等の処理に必要な各種のプログラムを保存する記憶部を内蔵し、CPUによりプログラムをドライブすることにより制御機能等を実現する。ここで用いるプログラムには、上記書込み制御用のほか、後述する現像剤消費量を算出し、管理するためのプログラムが含まれる。
また、画像データにより変調された光ビームの主・副走査により感光体ドラム30の所定の領域を露光し、形成された潜像は、現像剤(トナー)により現像される。即ち、感光体ドラム30の露光面に作用する現像装置(不図示)を通して、潜像に現像剤(トナー)を付着させ、可視像を生成する。なお、感光体ドラム30の露光による潜像の形成、トナーによる現像、感光体上のトナー像の記録媒体への転写、といった、電子写真方式の画像形成プロセスそのものについては、既存の技術であるから、ここでは、説明を省略する。
書込み制御部50は、転写紙の搬送にタイミングを合わせて、発生される書込みのスタート信号を基準にして、副走査方向の画像位置を定める副走査ゲート信号を生成し、ゲート期間にライン画像を書込む。ライン位置は、副走査カウント部のカウント値により検知し、書込みタイミング制御や後述する現像剤消費量の算出に用いる。
書込み制御部50は、書込み制御及び書込みに関連する処理を実行するためのCPUと、制御データ等の処理に必要な各種のプログラムを保存する記憶部を内蔵し、CPUによりプログラムをドライブすることにより制御機能等を実現する。ここで用いるプログラムには、上記書込み制御用のほか、後述する現像剤消費量を算出し、管理するためのプログラムが含まれる。
また、画像データにより変調された光ビームの主・副走査により感光体ドラム30の所定の領域を露光し、形成された潜像は、現像剤(トナー)により現像される。即ち、感光体ドラム30の露光面に作用する現像装置(不図示)を通して、潜像に現像剤(トナー)を付着させ、可視像を生成する。なお、感光体ドラム30の露光による潜像の形成、トナーによる現像、感光体上のトナー像の記録媒体への転写、といった、電子写真方式の画像形成プロセスそのものについては、既存の技術であるから、ここでは、説明を省略する。
本発明は、図1に例示する装置におけるような、電子写真方式による画像形成を行う場合に、消費される現像剤(トナー)の量を求める手法を提案するものである。
ここで現像剤の消費量を求めるために採用する方法は、基本的には、感光体ドラム30の走査露光に用いる画像データに基づいて求める。即ち、画像データに対応した値を持つドットの配列で表されるデータを書込み信号に用いて、ライン画像が形成されるので、書込まれるドットにより与えられる露光エネルギーと一定の関数関係をもって、現像剤が消費されるという条件を前提にする。
現像剤消費量と露光エネルギーのこの関数関係は、1走査ライン画像において、1走査ライン画像と他の走査ライン画像との露光領域が重なる場合と、重ならない場合で異なることが知られている。
従って、プリント出力を要求された画像の全消費量を算出するためには、対象画像の画像データから露光領域の重なり具合を検出し、重なる領域のエネルギーの総量と重ならない領域のエネルギーの総量をもとめ、それぞれに異なる重み係数を乗じた後、加算し、算出した総和を対象画像の正しい消費量として得る、という算出操作を必要とする。ここで、正しい消費量を推定するためには、重み係数を予め実験的に求めておかなければならない。
なお、上記の操作により現像剤消費量を算出する方法は、先に示した先行技術(特願2005−326650号)における方法をベースに実施することができるので、詳しくは、この先行技術の記載を参照することとして、ここでは、記載を省略する。
ここで現像剤の消費量を求めるために採用する方法は、基本的には、感光体ドラム30の走査露光に用いる画像データに基づいて求める。即ち、画像データに対応した値を持つドットの配列で表されるデータを書込み信号に用いて、ライン画像が形成されるので、書込まれるドットにより与えられる露光エネルギーと一定の関数関係をもって、現像剤が消費されるという条件を前提にする。
現像剤消費量と露光エネルギーのこの関数関係は、1走査ライン画像において、1走査ライン画像と他の走査ライン画像との露光領域が重なる場合と、重ならない場合で異なることが知られている。
従って、プリント出力を要求された画像の全消費量を算出するためには、対象画像の画像データから露光領域の重なり具合を検出し、重なる領域のエネルギーの総量と重ならない領域のエネルギーの総量をもとめ、それぞれに異なる重み係数を乗じた後、加算し、算出した総和を対象画像の正しい消費量として得る、という算出操作を必要とする。ここで、正しい消費量を推定するためには、重み係数を予め実験的に求めておかなければならない。
なお、上記の操作により現像剤消費量を算出する方法は、先に示した先行技術(特願2005−326650号)における方法をベースに実施することができるので、詳しくは、この先行技術の記載を参照することとして、ここでは、記載を省略する。
本発明における手法の特徴は、上記[発明が解決しようとする課題]の項において、図2〜5を参照して述べた、回転多面鏡よりなる偏向器を用いた主走査手段の特性に依存する露光状態の変動、を考慮し、より高精度な現像剤の消費量を求めることを可能にするところにある。
以下には、この特徴を有した現像剤の消費量の算出に係わる実施形態を示す。
ここでは、現像剤の消費量の算出結果に影響する、回転多面鏡よりなる偏向器を用いた主走査手段の特性に依存する変動要素として、
(1) 回転多面鏡の反射係数
(2) 回転多面鏡の反射面の面倒れ角
(3) 露光面における光ビームのスポット径の主走査方向に生じる変動
の要素を考慮する。
上記(1) 〜 (3) の要素は、これらの要素による変動が単独で生じる場合、或いは複合して生じる場合がある。
さらに、後記で詳述するが、同時に複数ビームによる書込みを可能とする発光源として、複数光源を持つLDアレイを用いた場合に起きる、同一周期の近接ライン間と走査周期が異なる近接ライン間との露光条件が異なることによる、現像剤の消費量への影響を変動要素として考慮する。
これらの変動要素が異なる形で係わる場合に対応して、適用することができる現像剤消費量算出方式の主なバリエーションについて、下記の「実施形態1」〜「実施形態12」に示す。
以下には、この特徴を有した現像剤の消費量の算出に係わる実施形態を示す。
ここでは、現像剤の消費量の算出結果に影響する、回転多面鏡よりなる偏向器を用いた主走査手段の特性に依存する変動要素として、
(1) 回転多面鏡の反射係数
(2) 回転多面鏡の反射面の面倒れ角
(3) 露光面における光ビームのスポット径の主走査方向に生じる変動
の要素を考慮する。
上記(1) 〜 (3) の要素は、これらの要素による変動が単独で生じる場合、或いは複合して生じる場合がある。
さらに、後記で詳述するが、同時に複数ビームによる書込みを可能とする発光源として、複数光源を持つLDアレイを用いた場合に起きる、同一周期の近接ライン間と走査周期が異なる近接ライン間との露光条件が異なることによる、現像剤の消費量への影響を変動要素として考慮する。
これらの変動要素が異なる形で係わる場合に対応して、適用することができる現像剤消費量算出方式の主なバリエーションについて、下記の「実施形態1」〜「実施形態12」に示す。
「実施形態1」
この実施形態は、回転多面鏡20の反射係数が各反射面で異なり、一定とすると算出する現像剤消費量を誤らせる要素となることに対応して、正しい消費量を算出するための手段を示すものである。
ここでは、現像剤消費量を算出する際に、画像の書込みに用いている回転多面鏡20の反射面を特定し、当該画像の現像剤消費量を算出する演算に用いる重み係数の設定を、特定された反射面の反射係数に応じて変更することにより、反射係数の違いが誤差にならないようにするものである。
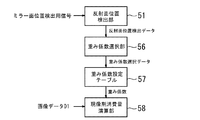
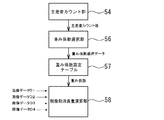
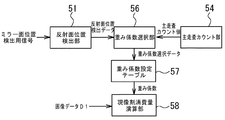
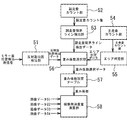
図6は、本実施形態の現像剤消費量算出手段の構成を機能ブロックとして示す。
図6に示す現像剤消費量算出手段は、現像剤消費量演算部58と、現像剤消費量演算部58に重み係数を設定するための手段として、反射面位置検出部51、重み係数選択部56及び重み係数設定テーブル57を有する。
重み係数設定テーブル57は、予め実験により回転多面鏡20の反射係数と重み係数の関係を求め、得られるデータをテーブルとして、NV(nonvolatile)RAMなどの記憶媒体に格納し、管理する。テーブルとして格納するデータは、回転多面鏡20のどの反射面であるかを特定する反射面位置から重み係数を直接参照する方式に対応するようにしても良いし、反射係数を介して重み係数を参照する方式に対応するようにしても良い。
反射面位置検出部51は、回転多面鏡20を回動するポリゴンモータの駆動部22から送られてくるミラー面の回転位置を示す位置検知用信号をもとに、画像の書込みに用いている回転多面鏡20の反射面がどの面であるかを特定する。
重み係数選択部56は、反射面位置検出部51で検出された反射面位置データをもとに重み係数設定テーブル57を参照して重み係数を選択する操作を行う。重み係数選択データによって重み係数設定テーブル57を参照することにより得られる重み係数は、現像剤消費量演算部58に設定される。
本実施形態は、発光源として、1ビームを発光するLDを用いているので、図6に示すように、消費量演算部58に入力される画像データD1 に対し、走査ラインごとに回転多面鏡20の反射面が変わるので、重み係数もライン単位で設定し直す。
この実施形態は、回転多面鏡20の反射係数が各反射面で異なり、一定とすると算出する現像剤消費量を誤らせる要素となることに対応して、正しい消費量を算出するための手段を示すものである。
ここでは、現像剤消費量を算出する際に、画像の書込みに用いている回転多面鏡20の反射面を特定し、当該画像の現像剤消費量を算出する演算に用いる重み係数の設定を、特定された反射面の反射係数に応じて変更することにより、反射係数の違いが誤差にならないようにするものである。
図6は、本実施形態の現像剤消費量算出手段の構成を機能ブロックとして示す。
図6に示す現像剤消費量算出手段は、現像剤消費量演算部58と、現像剤消費量演算部58に重み係数を設定するための手段として、反射面位置検出部51、重み係数選択部56及び重み係数設定テーブル57を有する。
重み係数設定テーブル57は、予め実験により回転多面鏡20の反射係数と重み係数の関係を求め、得られるデータをテーブルとして、NV(nonvolatile)RAMなどの記憶媒体に格納し、管理する。テーブルとして格納するデータは、回転多面鏡20のどの反射面であるかを特定する反射面位置から重み係数を直接参照する方式に対応するようにしても良いし、反射係数を介して重み係数を参照する方式に対応するようにしても良い。
反射面位置検出部51は、回転多面鏡20を回動するポリゴンモータの駆動部22から送られてくるミラー面の回転位置を示す位置検知用信号をもとに、画像の書込みに用いている回転多面鏡20の反射面がどの面であるかを特定する。
重み係数選択部56は、反射面位置検出部51で検出された反射面位置データをもとに重み係数設定テーブル57を参照して重み係数を選択する操作を行う。重み係数選択データによって重み係数設定テーブル57を参照することにより得られる重み係数は、現像剤消費量演算部58に設定される。
本実施形態は、発光源として、1ビームを発光するLDを用いているので、図6に示すように、消費量演算部58に入力される画像データD1 に対し、走査ラインごとに回転多面鏡20の反射面が変わるので、重み係数もライン単位で設定し直す。
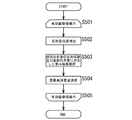
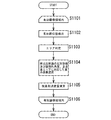
図7を参照して、現像剤消費量算出手段(図6)が行う現像剤消費量の算出処理のフローを説明する。
プリント出力の要求時、書込み制御部50は、画像形成の実行指示に従い、画像の書込制御を開始し、感光体ドラム30を光ビームにより走査露光する。この書込制御の一環として、図7に示す現像剤消費量の算出処理のフローを実行する。
図7に示すフローによると、先ず、有効画像領域への書込であることを確認し(ステップS101)、最初のライン画像に対する現像剤消費量の算出処理を始める。
始めに、1ライン目の画像の書込みに用いている回転多面鏡20の反射面がどの反射面であるか、反射面を検出する(ステップS102)。ここでは、反射面位置検出部51によって、ポリゴンモータの駆動部22から送られてくるミラー面の回転位置を示す位置検知用信号から、例えば6面あれば1〜6のどの面であるかを判定する。
次に、特定された反射面の反射係数に対応した重み係数を選択する(ステップS103)。重み係数選択部56は、反射面位置検出部51で検出された反射面を特定するデータをもとに、反射面と重み係数を対応付けた重み係数設定テーブル57を参照して、反射面が持つ反射係数に応じた重み係数を選択し、得られる重み係数を現像剤消費量演算部58に設定する。
次いで、現像剤消費量演算部58は、1ライン目の画像データD1に対する現像剤の消費量を設定された重み係数を用いた演算によって算出する(ステップS104)。
この現像剤消費量の演算は、ライン画像の書込みに用いるデータに対し、順次有効画像領域の最終ラインの画像まで、ラインごとに繰り返される。従って、処理フローとしては、有効領域内であることを確認し(ステップS105)、この確認ができれば、再びステップS102に戻して、現像剤消費量の演算を繰り返す。
ステップS105で、有効領域内を外れたことが確認できれば、この処理フローを終了する。
本実施形態では、上記のように、回転多面鏡20の反射係数が各反射面で異なる場合にも、重み係数を変更することにより現像剤消費量を正しい値に調整することが可能になり、所期の目的を達成することができる。
プリント出力の要求時、書込み制御部50は、画像形成の実行指示に従い、画像の書込制御を開始し、感光体ドラム30を光ビームにより走査露光する。この書込制御の一環として、図7に示す現像剤消費量の算出処理のフローを実行する。
図7に示すフローによると、先ず、有効画像領域への書込であることを確認し(ステップS101)、最初のライン画像に対する現像剤消費量の算出処理を始める。
始めに、1ライン目の画像の書込みに用いている回転多面鏡20の反射面がどの反射面であるか、反射面を検出する(ステップS102)。ここでは、反射面位置検出部51によって、ポリゴンモータの駆動部22から送られてくるミラー面の回転位置を示す位置検知用信号から、例えば6面あれば1〜6のどの面であるかを判定する。
次に、特定された反射面の反射係数に対応した重み係数を選択する(ステップS103)。重み係数選択部56は、反射面位置検出部51で検出された反射面を特定するデータをもとに、反射面と重み係数を対応付けた重み係数設定テーブル57を参照して、反射面が持つ反射係数に応じた重み係数を選択し、得られる重み係数を現像剤消費量演算部58に設定する。
次いで、現像剤消費量演算部58は、1ライン目の画像データD1に対する現像剤の消費量を設定された重み係数を用いた演算によって算出する(ステップS104)。
この現像剤消費量の演算は、ライン画像の書込みに用いるデータに対し、順次有効画像領域の最終ラインの画像まで、ラインごとに繰り返される。従って、処理フローとしては、有効領域内であることを確認し(ステップS105)、この確認ができれば、再びステップS102に戻して、現像剤消費量の演算を繰り返す。
ステップS105で、有効領域内を外れたことが確認できれば、この処理フローを終了する。
本実施形態では、上記のように、回転多面鏡20の反射係数が各反射面で異なる場合にも、重み係数を変更することにより現像剤消費量を正しい値に調整することが可能になり、所期の目的を達成することができる。
「実施形態2」
この実施形態は、回転多面鏡20の反射係数が各反射面で異なる場合に、正しい消費量を算出する点で、上記実施形態1と同様の目的を持つが、発光源にLDアレイを用い、複数ビームで走査を行う場合に対応するものである。
複数ビームで走査を行う場合には、図8の4ビームの例に示すように、回転多面鏡20の1反射面による感光面の1走査でライン1〜4を同時に書込み、この後、副走査方向にシフトさせ、次の反射面による4ビームの走査でライン5〜8を同時に書込む。この走査方式において、露光条件は、反射面において異なり、この違いが算出する現像剤消費量を誤らせる要素となることから、この変動要素に対応して、正しい消費量を算出するための手段を示すものである。
ここでは、現像剤消費量を算出する際に、画像の書込みに用いている回転多面鏡20の反射面を特定するとともに、1反射面で同時に書込む複数ライン画像中の境界ラインを検出して、当該画像の現像剤消費量を算出する演算に用いる重み係数の設定を、反射面ごとに区切って、各面に応じた係数に変更することにより、この変動要素の違いが誤差にならないようにするものである。
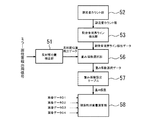
図9は、本実施形態の現像剤消費量算出手段の構成を機能ブロックとして示す。
図9に示す現像剤消費量算出手段は、上記実施形態1に示した構成(図6)をベースに、回転多面鏡20の反射面の切替わりに対応するための付加構成として、副走査カウント部52と副走査境界ライン検出部53を有するものである。
副走査カウント部52は、ライン画像の副走査方向の書込み位置を定める副走査カウント値を出力する。
副走査境界ライン検出部53は、副走査カウント部52から渡される副走査カウント値と、1反射面による走査で同時に書込むライン数(図示の例では、4ライン)をもとに、副走査境界ラインを検出する。
なお、図9に示す現像剤消費量算出手段における重み係数選択部56及び重み係数設定テーブル57は、基本的には、図6と同様に構成し得るが、副走査境界ラインであるか、否かを示す副走査境界ライン検出データに応じて、重み係数の選択動作を行うので、当然、対応した構成の変更を必要とする。
また、現像剤消費量演算部58についても、回転多面鏡20の1反射面で同時に複数ラインを書込み、次の反射面に切替えて、同時に複数ラインの書込みを行うので、1反射面で書込むライン数の単位(この例では、4画像データD1〜D4の単位)で演算処理を行うものとする。
この実施形態は、回転多面鏡20の反射係数が各反射面で異なる場合に、正しい消費量を算出する点で、上記実施形態1と同様の目的を持つが、発光源にLDアレイを用い、複数ビームで走査を行う場合に対応するものである。
複数ビームで走査を行う場合には、図8の4ビームの例に示すように、回転多面鏡20の1反射面による感光面の1走査でライン1〜4を同時に書込み、この後、副走査方向にシフトさせ、次の反射面による4ビームの走査でライン5〜8を同時に書込む。この走査方式において、露光条件は、反射面において異なり、この違いが算出する現像剤消費量を誤らせる要素となることから、この変動要素に対応して、正しい消費量を算出するための手段を示すものである。
ここでは、現像剤消費量を算出する際に、画像の書込みに用いている回転多面鏡20の反射面を特定するとともに、1反射面で同時に書込む複数ライン画像中の境界ラインを検出して、当該画像の現像剤消費量を算出する演算に用いる重み係数の設定を、反射面ごとに区切って、各面に応じた係数に変更することにより、この変動要素の違いが誤差にならないようにするものである。
図9は、本実施形態の現像剤消費量算出手段の構成を機能ブロックとして示す。
図9に示す現像剤消費量算出手段は、上記実施形態1に示した構成(図6)をベースに、回転多面鏡20の反射面の切替わりに対応するための付加構成として、副走査カウント部52と副走査境界ライン検出部53を有するものである。
副走査カウント部52は、ライン画像の副走査方向の書込み位置を定める副走査カウント値を出力する。
副走査境界ライン検出部53は、副走査カウント部52から渡される副走査カウント値と、1反射面による走査で同時に書込むライン数(図示の例では、4ライン)をもとに、副走査境界ラインを検出する。
なお、図9に示す現像剤消費量算出手段における重み係数選択部56及び重み係数設定テーブル57は、基本的には、図6と同様に構成し得るが、副走査境界ラインであるか、否かを示す副走査境界ライン検出データに応じて、重み係数の選択動作を行うので、当然、対応した構成の変更を必要とする。
また、現像剤消費量演算部58についても、回転多面鏡20の1反射面で同時に複数ラインを書込み、次の反射面に切替えて、同時に複数ラインの書込みを行うので、1反射面で書込むライン数の単位(この例では、4画像データD1〜D4の単位)で演算処理を行うものとする。
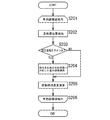
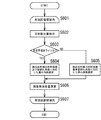
図10を参照して、現像剤消費量算出手段(図9)が行う現像剤消費量の算出処理のフローを説明する。
プリント出力の要求時、書込み制御部50は、画像形成の実行指示に従い、画像の書込制御を開始し、感光体ドラム30を光ビームにより走査露光する。この書込制御の一環として、図10に示す現像剤消費量の算出処理のフローを実行する。
図10に示すフローによると、先ず、有効画像領域への書込であることを確認し(ステップS201)、最初の書込対象のライン画像に対する現像剤消費量の算出処理を始める。
主走査方向に
重み係数の選択動作を行う(ステップS204)。つまり、重み係数選択部56は、副走査境界ライン検出データが出力されない間は、重み係数設定テーブル57を参照しない。従って、副走査境界ライン検出時に、重み係数設定テーブル57から得た1重み係数が、1反射面で同時に書込む4ラインの各画像に用いる重み係数として、変更しないで、現像剤消費量演算部58に設定される。
次いで、現像剤消費量演算部58は、1面目の4画像データD1〜D4にそれぞれに対する現像剤の消費量を設定された重み係数を用いた演算によって算出する(ステップS205)。
この現像剤消費量の演算は、ライン画像の書込みに用いるデータに対し、順次有効画像領域の最終ラインの画像まで、1反射面で同時に書込む4ラインごとに繰返えされる。従って、処理フローとしては、有効領域内であることを確認し(ステップS206)、この確認ができれば、再びステップS202に戻して、現像剤消費量の演算を繰り返す。
ステップS206で、有効領域内を外れたことが確認できれば、この処理フローを終了する。
本実施形態では、上記のように、回転多面鏡20の反射係数が各反射面で異なり、且つ1反射面で同時に複数ビームの書込みを行う場合にも、重み係数を変更することにより現像剤消費量を正しい値に調整することが可能になり、所期の目的を達成することができる。
プリント出力の要求時、書込み制御部50は、画像形成の実行指示に従い、画像の書込制御を開始し、感光体ドラム30を光ビームにより走査露光する。この書込制御の一環として、図10に示す現像剤消費量の算出処理のフローを実行する。
図10に示すフローによると、先ず、有効画像領域への書込であることを確認し(ステップS201)、最初の書込対象のライン画像に対する現像剤消費量の算出処理を始める。
主走査方向に
重み係数の選択動作を行う(ステップS204)。つまり、重み係数選択部56は、副走査境界ライン検出データが出力されない間は、重み係数設定テーブル57を参照しない。従って、副走査境界ライン検出時に、重み係数設定テーブル57から得た1重み係数が、1反射面で同時に書込む4ラインの各画像に用いる重み係数として、変更しないで、現像剤消費量演算部58に設定される。
次いで、現像剤消費量演算部58は、1面目の4画像データD1〜D4にそれぞれに対する現像剤の消費量を設定された重み係数を用いた演算によって算出する(ステップS205)。
この現像剤消費量の演算は、ライン画像の書込みに用いるデータに対し、順次有効画像領域の最終ラインの画像まで、1反射面で同時に書込む4ラインごとに繰返えされる。従って、処理フローとしては、有効領域内であることを確認し(ステップS206)、この確認ができれば、再びステップS202に戻して、現像剤消費量の演算を繰り返す。
ステップS206で、有効領域内を外れたことが確認できれば、この処理フローを終了する。
本実施形態では、上記のように、回転多面鏡20の反射係数が各反射面で異なり、且つ1反射面で同時に複数ビームの書込みを行う場合にも、重み係数を変更することにより現像剤消費量を正しい値に調整することが可能になり、所期の目的を達成することができる。
「実施形態3」
この実施形態は、回転多面鏡20の面倒れ角度(図2,3、参照)が各反射面で異なり、一定とすると算出する現像剤消費量を誤らせる要素となることに対応して、正しい消費量を算出するための手段を示すものである。
ここでは、現像剤消費量を算出する際に、画像の書込みに用いている回転多面鏡20の反射面を特定し、当該画像の現像剤消費量を算出する演算に用いる重み係数の設定を、特定された反射面の面倒れ角度に応じて変更することにより、面倒れ角度の違いが誤差にならないようにするものである。
本実施形態の現像剤消費量算出手段は、上記実施形態1において回転多面鏡20の各反射面の反射係数が異なる場合の手段として示した図6と同様に構成し得る。
ただし、上記実施形態1において、図6の重み係数設定テーブル57は、反射係数と重み係数の関係としたが、本実施形態では、面倒れ角度と重み係数の関係とする。即ち、重み係数設定テーブル57には、予め実験により回転多面鏡20の面倒れ角度と重み係数の関係を求め、得られるデータをテーブルとして、NVRAMなどの記憶媒体に格納し、管理する。
この実施形態は、回転多面鏡20の面倒れ角度(図2,3、参照)が各反射面で異なり、一定とすると算出する現像剤消費量を誤らせる要素となることに対応して、正しい消費量を算出するための手段を示すものである。
ここでは、現像剤消費量を算出する際に、画像の書込みに用いている回転多面鏡20の反射面を特定し、当該画像の現像剤消費量を算出する演算に用いる重み係数の設定を、特定された反射面の面倒れ角度に応じて変更することにより、面倒れ角度の違いが誤差にならないようにするものである。
本実施形態の現像剤消費量算出手段は、上記実施形態1において回転多面鏡20の各反射面の反射係数が異なる場合の手段として示した図6と同様に構成し得る。
ただし、上記実施形態1において、図6の重み係数設定テーブル57は、反射係数と重み係数の関係としたが、本実施形態では、面倒れ角度と重み係数の関係とする。即ち、重み係数設定テーブル57には、予め実験により回転多面鏡20の面倒れ角度と重み係数の関係を求め、得られるデータをテーブルとして、NVRAMなどの記憶媒体に格納し、管理する。
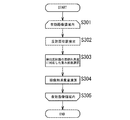
図11は、本実施形態の現像剤消費量算出手段が行う現像剤消費量の算出処理のフローを示す。
プリント出力の要求時、書込み制御部50は、画像形成の実行指示に従い、画像の書込制御を開始し、感光体ドラム30を光ビームにより走査露光する。この書込制御の一環として、図11に示す現像剤消費量の算出処理のフローを実行する。
図11に示すフローによると、先ず、有効画像領域への書込であることを確認し(ステップS301)、最初のライン画像に対する現像剤消費量の算出処理を始める。
始めに、1ライン目の画像の書込みに用いている回転多面鏡20の反射面がどの反射面であるか、反射面を検出する(ステップS302)。ここでは、反射面位置検出部51によって、ポリゴンモータの駆動部22から送られてくるミラー面の回転位置を示す位置検知用信号から、例えば6面あれば1〜6のどの面であるかを判定する。
次に、特定された反射面の面倒れ角度に対応した重み係数を選択する(ステップS303)。重み係数選択部56は、反射面位置検出部51で検出された反射面を特定するデータをもとに、反射面と重み係数を対応付けた重み係数設定テーブル57を参照して、反射面が持つ面倒れ角度に応じた重み係数を選択し、得られる重み係数を現像剤消費量演算部58に設定する。
次いで、現像剤消費量演算部58は、1ライン目の画像データD1に対する現像剤の消費量を設定された重み係数を用いた演算によって算出する(ステップS304)。
この現像剤消費量の演算は、ライン画像の書込みに用いるデータに対し、順次有効画像領域の最終ラインの画像まで、ラインごとに繰り返えされる。従って、処理フローとしては、有効領域内であることを確認し(ステップS305)、この確認ができれば、再びステップS302に戻して、現像剤消費量の演算を繰り返す。
ステップS305で、有効領域内を外れたことが確認できれば、この処理フローを終了する。
本実施形態では、上記のように、回転多面鏡20の面倒れ角度が各反射面で異なる場合にも、重み係数を変更することにより現像剤消費量を正しい値に調整することが可能になり、所期の目的を達成することができる。
プリント出力の要求時、書込み制御部50は、画像形成の実行指示に従い、画像の書込制御を開始し、感光体ドラム30を光ビームにより走査露光する。この書込制御の一環として、図11に示す現像剤消費量の算出処理のフローを実行する。
図11に示すフローによると、先ず、有効画像領域への書込であることを確認し(ステップS301)、最初のライン画像に対する現像剤消費量の算出処理を始める。
始めに、1ライン目の画像の書込みに用いている回転多面鏡20の反射面がどの反射面であるか、反射面を検出する(ステップS302)。ここでは、反射面位置検出部51によって、ポリゴンモータの駆動部22から送られてくるミラー面の回転位置を示す位置検知用信号から、例えば6面あれば1〜6のどの面であるかを判定する。
次に、特定された反射面の面倒れ角度に対応した重み係数を選択する(ステップS303)。重み係数選択部56は、反射面位置検出部51で検出された反射面を特定するデータをもとに、反射面と重み係数を対応付けた重み係数設定テーブル57を参照して、反射面が持つ面倒れ角度に応じた重み係数を選択し、得られる重み係数を現像剤消費量演算部58に設定する。
次いで、現像剤消費量演算部58は、1ライン目の画像データD1に対する現像剤の消費量を設定された重み係数を用いた演算によって算出する(ステップS304)。
この現像剤消費量の演算は、ライン画像の書込みに用いるデータに対し、順次有効画像領域の最終ラインの画像まで、ラインごとに繰り返えされる。従って、処理フローとしては、有効領域内であることを確認し(ステップS305)、この確認ができれば、再びステップS302に戻して、現像剤消費量の演算を繰り返す。
ステップS305で、有効領域内を外れたことが確認できれば、この処理フローを終了する。
本実施形態では、上記のように、回転多面鏡20の面倒れ角度が各反射面で異なる場合にも、重み係数を変更することにより現像剤消費量を正しい値に調整することが可能になり、所期の目的を達成することができる。
「実施形態4」
この実施形態は、回転多面鏡20の面倒れ角度が各反射面で異なる場合に、正しい消費量を算出する点で、上記実施形態3と同様の目的を持つが、発光源にLDアレイを用い、複数ビームで走査を行う場合に対応するものである。
複数ビームで走査を行う場合には、図8の4ビームの例に示すように、回転多面鏡20の1反射面による感光面の1走査でライン1〜4を同時に書込み、この後、副走査方向にシフトさせ、次の反射面による4ビームの走査でライン5〜8を同時に書込む。この走査方式において、露光条件は、反射面の面倒れ角度に依存して不均一になり、算出する現像剤消費量を誤らせる要素となることから、この変動要素に対応して、正しい消費量を算出するための手段を示すものである。
ここでは、現像剤消費量を算出する際に、画像の書込みに用いている回転多面鏡20の反射面を特定するとともに、1反射面で同時に書込む複数ライン画像中の境界ラインを検出する。
検出した境界ラインの画像に対しては、現像剤消費量を算出する演算に用いる重み係数の設定を、各面の面倒れ角度に応じて変更することにより、この変動要素の違いが誤差にならないようにする。
なお、境界ライン以外の画像に対して適用する重み係数には、基準の面倒れ角度に対応した値を設定する。
この実施形態は、回転多面鏡20の面倒れ角度が各反射面で異なる場合に、正しい消費量を算出する点で、上記実施形態3と同様の目的を持つが、発光源にLDアレイを用い、複数ビームで走査を行う場合に対応するものである。
複数ビームで走査を行う場合には、図8の4ビームの例に示すように、回転多面鏡20の1反射面による感光面の1走査でライン1〜4を同時に書込み、この後、副走査方向にシフトさせ、次の反射面による4ビームの走査でライン5〜8を同時に書込む。この走査方式において、露光条件は、反射面の面倒れ角度に依存して不均一になり、算出する現像剤消費量を誤らせる要素となることから、この変動要素に対応して、正しい消費量を算出するための手段を示すものである。
ここでは、現像剤消費量を算出する際に、画像の書込みに用いている回転多面鏡20の反射面を特定するとともに、1反射面で同時に書込む複数ライン画像中の境界ラインを検出する。
検出した境界ラインの画像に対しては、現像剤消費量を算出する演算に用いる重み係数の設定を、各面の面倒れ角度に応じて変更することにより、この変動要素の違いが誤差にならないようにする。
なお、境界ライン以外の画像に対して適用する重み係数には、基準の面倒れ角度に対応した値を設定する。
本実施形態の現像剤消費量算出手段は、上記実施形態2において回転多面鏡20の各反射面の面倒れ角度が異なる場合の手段として示した図9と同様に構成し得る。
ただし、上記実施形態2において、図9の重み係数設定テーブル57は、反射係数と重み係数の関係としたが、本実施形態では、面倒れ角度と重み係数の関係とする。即ち、重み係数設定テーブル57には、予め実験により回転多面鏡20の面倒れ角度と重み係数の関係を求め、得られるデータをテーブルとして、NVRAMなどの記憶媒体に格納し、管理する。
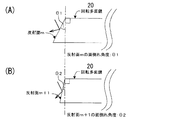
ここに、複数ビームを出力するLDアレイのように、LD光源間距離が一定の発光源を使用した場合、1走査で4ビームの書込みを行う例では、図12に示すように、反射面の面倒れ角度θ1が、全て同一の理想状態にある(A)側のビームスポット列におけるビームピッチ間隔は、全部Dとなり、この面倒れ角度に対応する重み係数を適用すれば、誤差は生じない。なお、ビームピッチ間隔Dとなる面倒れ角度θ1が基準であれば、この面倒れ角度に対する重み係数が、基準値として、重み係数設定テーブル57に格納される。
他方、図12の(B)側に示す、反射面の面倒れ角度θが、反射面m(θ1)と反射面m+1(θ2)とで異なる場合のビームスポット列は、副走査境界ラインのスポットによるビームピッチ間隔がD´になって、境界ライン以外のスポットの間隔Dと異なる。このスポットの位置ずれにより、副走査境界にあるビームの重ね合せ部分が、図12(A)の場合と異なる結果となり、ここにビームピッチ間隔Dにおけると同じ重み係数を用いると、現像剤の消費量に誤差が生じてしまう。
そこで、ビームピッチ間隔がD´になる時の面倒れ角度θ1とθ2に対して正しい消費量を導く重み係数が、重み係数設定テーブル57に格納される。
ただし、上記実施形態2において、図9の重み係数設定テーブル57は、反射係数と重み係数の関係としたが、本実施形態では、面倒れ角度と重み係数の関係とする。即ち、重み係数設定テーブル57には、予め実験により回転多面鏡20の面倒れ角度と重み係数の関係を求め、得られるデータをテーブルとして、NVRAMなどの記憶媒体に格納し、管理する。
ここに、複数ビームを出力するLDアレイのように、LD光源間距離が一定の発光源を使用した場合、1走査で4ビームの書込みを行う例では、図12に示すように、反射面の面倒れ角度θ1が、全て同一の理想状態にある(A)側のビームスポット列におけるビームピッチ間隔は、全部Dとなり、この面倒れ角度に対応する重み係数を適用すれば、誤差は生じない。なお、ビームピッチ間隔Dとなる面倒れ角度θ1が基準であれば、この面倒れ角度に対する重み係数が、基準値として、重み係数設定テーブル57に格納される。
他方、図12の(B)側に示す、反射面の面倒れ角度θが、反射面m(θ1)と反射面m+1(θ2)とで異なる場合のビームスポット列は、副走査境界ラインのスポットによるビームピッチ間隔がD´になって、境界ライン以外のスポットの間隔Dと異なる。このスポットの位置ずれにより、副走査境界にあるビームの重ね合せ部分が、図12(A)の場合と異なる結果となり、ここにビームピッチ間隔Dにおけると同じ重み係数を用いると、現像剤の消費量に誤差が生じてしまう。
そこで、ビームピッチ間隔がD´になる時の面倒れ角度θ1とθ2に対して正しい消費量を導く重み係数が、重み係数設定テーブル57に格納される。
図13を参照して、現像剤消費量算出手段(図9)が行う現像剤消費量の算出処理のフローを説明する。
プリント出力の要求時、書込み制御部50は、画像形成の実行指示に従い、画像の書込制御を開始し、感光体ドラム30を光ビームにより走査露光する。この書込制御の一環として、図13に示す現像剤消費量の算出処理のフローを実行する。
図13に示すフローによると、先ず、有効画像領域への書込であることを確認し(ステップS401)、最初の書込対象のライン画像に対する現像剤消費量の算出処理を始める。なお、以下には、1反射面で同時に書込むライン数を4とした場合を例に説明する
始めに、1面目の4ライン書込みに用いている回転多面鏡20の反射面がどの反射面であるか、反射面を検出する(ステップS402)。ここでは、反射面位置検出部51によって、ポリゴンモータの駆動部22から送られてくるミラー面の回転位置を示す位置検知用信号から、例えば6面あれば1〜6のどの面であるかを判定する。
次に、特定された反射面の面倒れ角度に対応した重み係数を選択する。ただ、ここでは、同一反射面で4ラインずつ画像を書込むので、副走査境界ラインを検出し、副走査境界ラインと、それ以外のラインに異なる重み係数の選択をする。
このため、副走査境界ラインであるか、否かをチェックし(ステップS403)、副走査境界ラインである場合には(ステップS403-YES)、検出反射面の面倒れ角度に対応した重み係数の選択動作を行う(ステップS404)。即ち、重み係数選択部56は、副走査境界ラインに対し、反射面同士の面倒れ角度の違い(図12(B)の面倒れ角度θ1とθ2)に応じて、当該画像に用いる重み係数を重み係数設定テーブル57からとりだし、現像剤消費量演算部58に設定する。
他方、副走査境界ラインではない場合には(ステップS403-NO)、基準面倒れ角度に対応した重み係数の選択動作を行う(ステップS405)。即ち、重み係数選択部56は、副走査境界ライン以外のラインに対し、基準の重み係数値を現像剤消費量演算部58に設定する。
次いで、現像剤消費量演算部58は、1面目の4画像データD1〜D4にそれぞれに対する現像剤の消費量を設定された重み係数を用いた演算によって算出する(ステップS406)。
この現像剤消費量の演算は、ライン画像の書込みに用いるデータに対し、順次有効画像領域の最終ラインの画像まで、1反射面で同時に書込む4ラインごとに繰り返される。従って、処理フローとしては、有効領域内であることを確認し(ステップS407)、この確認ができれば、再びステップS402に戻して、現像剤消費量の演算を繰り返す。
ステップS407で、有効領域内を外れたことが確認できれば、この処理フローを終了する。
本実施形態では、上記のように、回転多面鏡20の面倒れ角度が各反射面で異なり、且つ1反射面で同時に複数ビームの書込みを行う場合にも、重み係数を変更することにより現像剤消費量を正しい値に調整することが可能になり、所期の目的を達成することができる。
プリント出力の要求時、書込み制御部50は、画像形成の実行指示に従い、画像の書込制御を開始し、感光体ドラム30を光ビームにより走査露光する。この書込制御の一環として、図13に示す現像剤消費量の算出処理のフローを実行する。
図13に示すフローによると、先ず、有効画像領域への書込であることを確認し(ステップS401)、最初の書込対象のライン画像に対する現像剤消費量の算出処理を始める。なお、以下には、1反射面で同時に書込むライン数を4とした場合を例に説明する
始めに、1面目の4ライン書込みに用いている回転多面鏡20の反射面がどの反射面であるか、反射面を検出する(ステップS402)。ここでは、反射面位置検出部51によって、ポリゴンモータの駆動部22から送られてくるミラー面の回転位置を示す位置検知用信号から、例えば6面あれば1〜6のどの面であるかを判定する。
次に、特定された反射面の面倒れ角度に対応した重み係数を選択する。ただ、ここでは、同一反射面で4ラインずつ画像を書込むので、副走査境界ラインを検出し、副走査境界ラインと、それ以外のラインに異なる重み係数の選択をする。
このため、副走査境界ラインであるか、否かをチェックし(ステップS403)、副走査境界ラインである場合には(ステップS403-YES)、検出反射面の面倒れ角度に対応した重み係数の選択動作を行う(ステップS404)。即ち、重み係数選択部56は、副走査境界ラインに対し、反射面同士の面倒れ角度の違い(図12(B)の面倒れ角度θ1とθ2)に応じて、当該画像に用いる重み係数を重み係数設定テーブル57からとりだし、現像剤消費量演算部58に設定する。
他方、副走査境界ラインではない場合には(ステップS403-NO)、基準面倒れ角度に対応した重み係数の選択動作を行う(ステップS405)。即ち、重み係数選択部56は、副走査境界ライン以外のラインに対し、基準の重み係数値を現像剤消費量演算部58に設定する。
次いで、現像剤消費量演算部58は、1面目の4画像データD1〜D4にそれぞれに対する現像剤の消費量を設定された重み係数を用いた演算によって算出する(ステップS406)。
この現像剤消費量の演算は、ライン画像の書込みに用いるデータに対し、順次有効画像領域の最終ラインの画像まで、1反射面で同時に書込む4ラインごとに繰り返される。従って、処理フローとしては、有効領域内であることを確認し(ステップS407)、この確認ができれば、再びステップS402に戻して、現像剤消費量の演算を繰り返す。
ステップS407で、有効領域内を外れたことが確認できれば、この処理フローを終了する。
本実施形態では、上記のように、回転多面鏡20の面倒れ角度が各反射面で異なり、且つ1反射面で同時に複数ビームの書込みを行う場合にも、重み係数を変更することにより現像剤消費量を正しい値に調整することが可能になり、所期の目的を達成することができる。
「実施形態5」
上記実施形態1、実施形態2では、現像剤消費量の算出において、誤差要因となる回転多面鏡20の各反射面における反射係数、面倒れ角度の相違が、それぞれ単独で生じる場合に対応する手段を示したが、この実施形態では、これらの誤差要因が複合して生じる場合に対応して、正しい消費量を算出するための手段を示すものである。
本実施形態の現像剤消費量算出手段は、上記実施形態1において回転多面鏡20の各反射面の反射係数が異なる場合の手段として示した図6と同様に構成し得る。
ただし、上記実施形態1において、図6の重み係数設定テーブル57は、反射係数と重み係数の関係としたが、本実施形態では、反射係数と面倒れ角度とを複合させたデータと重み係数の関係とする。即ち、重み係数設定テーブル57には、予め実験により回転多面鏡20の反射係数及び面倒れ角度の複合データと重み係数の関係を求め、得られるデータをテーブルとして、NVRAMなどの記憶媒体に格納し、管理する。
上記実施形態1、実施形態2では、現像剤消費量の算出において、誤差要因となる回転多面鏡20の各反射面における反射係数、面倒れ角度の相違が、それぞれ単独で生じる場合に対応する手段を示したが、この実施形態では、これらの誤差要因が複合して生じる場合に対応して、正しい消費量を算出するための手段を示すものである。
本実施形態の現像剤消費量算出手段は、上記実施形態1において回転多面鏡20の各反射面の反射係数が異なる場合の手段として示した図6と同様に構成し得る。
ただし、上記実施形態1において、図6の重み係数設定テーブル57は、反射係数と重み係数の関係としたが、本実施形態では、反射係数と面倒れ角度とを複合させたデータと重み係数の関係とする。即ち、重み係数設定テーブル57には、予め実験により回転多面鏡20の反射係数及び面倒れ角度の複合データと重み係数の関係を求め、得られるデータをテーブルとして、NVRAMなどの記憶媒体に格納し、管理する。
図14は、本実施形態の現像剤消費量算出手段が行う現像剤消費量の算出処理のフローを示す。
プリント出力の要求時、書込み制御部50は、画像形成の実行指示に従い、画像の書込制御を開始し、感光体ドラム30を光ビームにより走査露光する。この書込制御の一環として、図14に示す現像剤消費量の算出処理のフローを実行する。
図14に示すフローによると、先ず、有効画像領域への書込であることを確認し(ステップS501)、最初のライン画像に対する現像剤消費量の算出処理を始める。
始めに、1ライン目の画像の書込みに用いている回転多面鏡20の反射面がどの反射面であるか、反射面を検出する(ステップS502)。ここでは、反射面位置検出部51によって、ポリゴンモータの駆動部22から送られてくるミラー面の回転位置を示す位置検知用信号から、例えば6面あれば1〜6のどの面であるかを判定する。
次に、特定された反射面の反射係数及び面倒れ角度の複合データに対応した重み係数を選択する(ステップS503)。重み係数選択部56は、反射面位置検出部51で検出された反射面を特定するデータをもとに、反射面の反射係数及び面倒れ角度の複合データと重み係数を対応付けた重み係数設定テーブル57を参照して、反射面が持つ反射係数及び面倒れ角度に応じた重み係数を選択し、得られる重み係数を現像剤消費量演算部58に設定する。
次いで、現像剤消費量演算部58は、1ライン目の画像データD1に対する現像剤の消費量を設定された重み係数を用いた演算によって算出する(ステップS504)。
この現像剤消費量の演算は、ライン画像の書込みに用いるデータに対し、順次有効画像領域の最終ラインの画像まで、ラインごとに繰り返される。従って、処理フローとしては、有効領域内であることを確認し(ステップS505)、この確認ができれば、再びステップS502に戻して、現像剤消費量の演算を繰り返す。
ステップS505で、有効領域内を外れたことが確認できれば、この処理フローを終了する。
本実施形態では、上記のように、回転多面鏡20の反射係数及び面倒れ角度が各反射面で異なる場合にも、重み係数を変更することにより現像剤消費量を正しい値に調整することが可能になり、所期の目的を達成することができる。
プリント出力の要求時、書込み制御部50は、画像形成の実行指示に従い、画像の書込制御を開始し、感光体ドラム30を光ビームにより走査露光する。この書込制御の一環として、図14に示す現像剤消費量の算出処理のフローを実行する。
図14に示すフローによると、先ず、有効画像領域への書込であることを確認し(ステップS501)、最初のライン画像に対する現像剤消費量の算出処理を始める。
始めに、1ライン目の画像の書込みに用いている回転多面鏡20の反射面がどの反射面であるか、反射面を検出する(ステップS502)。ここでは、反射面位置検出部51によって、ポリゴンモータの駆動部22から送られてくるミラー面の回転位置を示す位置検知用信号から、例えば6面あれば1〜6のどの面であるかを判定する。
次に、特定された反射面の反射係数及び面倒れ角度の複合データに対応した重み係数を選択する(ステップS503)。重み係数選択部56は、反射面位置検出部51で検出された反射面を特定するデータをもとに、反射面の反射係数及び面倒れ角度の複合データと重み係数を対応付けた重み係数設定テーブル57を参照して、反射面が持つ反射係数及び面倒れ角度に応じた重み係数を選択し、得られる重み係数を現像剤消費量演算部58に設定する。
次いで、現像剤消費量演算部58は、1ライン目の画像データD1に対する現像剤の消費量を設定された重み係数を用いた演算によって算出する(ステップS504)。
この現像剤消費量の演算は、ライン画像の書込みに用いるデータに対し、順次有効画像領域の最終ラインの画像まで、ラインごとに繰り返される。従って、処理フローとしては、有効領域内であることを確認し(ステップS505)、この確認ができれば、再びステップS502に戻して、現像剤消費量の演算を繰り返す。
ステップS505で、有効領域内を外れたことが確認できれば、この処理フローを終了する。
本実施形態では、上記のように、回転多面鏡20の反射係数及び面倒れ角度が各反射面で異なる場合にも、重み係数を変更することにより現像剤消費量を正しい値に調整することが可能になり、所期の目的を達成することができる。
「実施形態6」
この実施形態は、回転多面鏡20の反射係数及び面倒れ角度が各反射面で異なる場合に、正しい消費量を算出する点で、上記実施形態5と同様の目的を持つが、発光源にLDアレイを用い、複数ビームで走査を行う場合に対応するものである。
複数ビームで走査を行う場合には、図8の4ビームの例に示すように、回転多面鏡20の1反射面による感光面の1走査でライン1〜4を同時に書込み、この後、副走査方向にシフトさせ、次の反射面による4ビームの走査でライン5〜8を同時に書込む。この走査方式において、露光条件は、反射面の反射係数及び面倒れ角度に依存して不均一になり、算出する現像剤消費量を誤らせる要素となることから、これらの変動要素に対応して、正しい消費量を算出するための手段を示すものである。
ここでは、現像剤消費量を算出する際に、画像の書込みに用いている回転多面鏡20の反射面を特定するとともに、1反射面で同時に書込む複数ライン画像中の境界ラインを検出する。
検出した境界ラインの画像に対しては、現像剤消費量を算出する演算に用いる重み係数の設定を、各面の反射係数及び面倒れ角度に応じて変更することにより、この変動要素の違いが誤差にならないようにする。
なお、境界ライン以外の画像に対して適用する重み係数には、各面の反射係数及び基準の面倒れ角度に対応した値を設定する。
この実施形態は、回転多面鏡20の反射係数及び面倒れ角度が各反射面で異なる場合に、正しい消費量を算出する点で、上記実施形態5と同様の目的を持つが、発光源にLDアレイを用い、複数ビームで走査を行う場合に対応するものである。
複数ビームで走査を行う場合には、図8の4ビームの例に示すように、回転多面鏡20の1反射面による感光面の1走査でライン1〜4を同時に書込み、この後、副走査方向にシフトさせ、次の反射面による4ビームの走査でライン5〜8を同時に書込む。この走査方式において、露光条件は、反射面の反射係数及び面倒れ角度に依存して不均一になり、算出する現像剤消費量を誤らせる要素となることから、これらの変動要素に対応して、正しい消費量を算出するための手段を示すものである。
ここでは、現像剤消費量を算出する際に、画像の書込みに用いている回転多面鏡20の反射面を特定するとともに、1反射面で同時に書込む複数ライン画像中の境界ラインを検出する。
検出した境界ラインの画像に対しては、現像剤消費量を算出する演算に用いる重み係数の設定を、各面の反射係数及び面倒れ角度に応じて変更することにより、この変動要素の違いが誤差にならないようにする。
なお、境界ライン以外の画像に対して適用する重み係数には、各面の反射係数及び基準の面倒れ角度に対応した値を設定する。
本実施形態の現像剤消費量算出手段は、上記実施形態2において回転多面鏡20の各反射面の面倒れ角度が異なる場合の手段として示した図9と同様に構成し得る。
ただし、上記実施形態2において、図9の重み係数設定テーブル57は、反射係数と重み係数の関係としたが、本実施形態では、反射係数及び面倒れ角度と重み係数の関係とする。即ち、重み係数設定テーブル57には、予め実験により回転多面鏡20の反射係数と面倒れ角度とを複合させたデータと重み係数の関係を求め、得られるデータをテーブルとして、NVRAMなどの記憶媒体に格納し、管理する。
ここに、複数ビームを出力するLDアレイのように、LD光源間距離が一定の発光源を使用した場合、1走査で4ビームの書込みを行う例では、図12に示すように、反射面の面倒れ角度θ1が、全て同一の理想状態にある(A)側のビームスポット列におけるビームピッチ間隔は、全部Dとなり、この面倒れ角度においては、複合される反射面の反射係数の変化に対応する重み係数を適用すれば、誤差は生じない。なお、ビームピッチ間隔Dとなる面倒れ角度θ1が基準であれば、この基準面倒れ角度に複合される反射係数の変化に応じた重み係数が基準の係数値として、設定テーブル57に格納される。
他方、図12の(B)側に示す、反射面の面倒れ角度θが、反射面m(θ1)と反射面m+1(θ2)とで異なる場合のビームスポット列は、副走査境界ラインのスポットによるビームピッチ間隔がD´になって、境界ライン以外のスポットの間隔Dと異なる。このスポットの位置ずれにより、副走査境界にあるビームの重ね合せ部分が、図12(A)の場合と異なる結果となり、ここにビームピッチ間隔Dにおけると同じ重み係数を用いると、現像剤の消費量に誤差が生じてしまう。
そこで、ビームピッチ間隔がD´になる時の面倒れ角度θ1とθ2及びこれに複合される反射係数の組合せのバリエーションに対して正しい消費量を導く重み係数が、重み係数設定テーブル57に格納される。
ただし、上記実施形態2において、図9の重み係数設定テーブル57は、反射係数と重み係数の関係としたが、本実施形態では、反射係数及び面倒れ角度と重み係数の関係とする。即ち、重み係数設定テーブル57には、予め実験により回転多面鏡20の反射係数と面倒れ角度とを複合させたデータと重み係数の関係を求め、得られるデータをテーブルとして、NVRAMなどの記憶媒体に格納し、管理する。
ここに、複数ビームを出力するLDアレイのように、LD光源間距離が一定の発光源を使用した場合、1走査で4ビームの書込みを行う例では、図12に示すように、反射面の面倒れ角度θ1が、全て同一の理想状態にある(A)側のビームスポット列におけるビームピッチ間隔は、全部Dとなり、この面倒れ角度においては、複合される反射面の反射係数の変化に対応する重み係数を適用すれば、誤差は生じない。なお、ビームピッチ間隔Dとなる面倒れ角度θ1が基準であれば、この基準面倒れ角度に複合される反射係数の変化に応じた重み係数が基準の係数値として、設定テーブル57に格納される。
他方、図12の(B)側に示す、反射面の面倒れ角度θが、反射面m(θ1)と反射面m+1(θ2)とで異なる場合のビームスポット列は、副走査境界ラインのスポットによるビームピッチ間隔がD´になって、境界ライン以外のスポットの間隔Dと異なる。このスポットの位置ずれにより、副走査境界にあるビームの重ね合せ部分が、図12(A)の場合と異なる結果となり、ここにビームピッチ間隔Dにおけると同じ重み係数を用いると、現像剤の消費量に誤差が生じてしまう。
そこで、ビームピッチ間隔がD´になる時の面倒れ角度θ1とθ2及びこれに複合される反射係数の組合せのバリエーションに対して正しい消費量を導く重み係数が、重み係数設定テーブル57に格納される。
図15を参照して、現像剤消費量算出手段(図9)が行う現像剤消費量の算出処理のフローを説明する。
プリント出力の要求時、書込み制御部50は、画像形成の実行指示に従い、画像の書込制御を開始し、感光体ドラム30を光ビームにより走査露光する。この書込制御の一環として、図15に示す現像剤消費量の算出処理のフローを実行する。
図15に示すフローによると、先ず、有効画像領域への書込であることを確認し(ステップS601)、最初の書込対象のライン画像に対する現像剤消費量の算出処理を始める。なお、以下には、1反射面で同時に書込むライン数を4とした場合を例に説明する
始めに、1面目の4ライン書込みに用いている回転多面鏡20の反射面がどの反射面であるか、反射面を検出する(ステップS602)。ここでは、反射面位置検出部51によって、ポリゴンモータの駆動部22から送られてくるミラー面の回転位置を示す位置検知用信号から、例えば6面あれば1〜6のどの面であるかを判定する。
次に、特定された反射面の反射係数と面倒れ角度とを複合させたデータに対応した重み係数を選択する。ただ、ここでは、同一反射面で4ラインずつ画像を書込むので、副走査境界ラインを検出し、副走査境界ラインと、それ以外のラインに異なる重み係数の選択をする。
このため、副走査境界ラインであるか、否かをチェックし(ステップS603)、副走査境界ラインである場合には(ステップS603-YES)、検出反射面の反射係数と面倒れ角度とを複合させたデータに対応した重み係数の選択動作を行う(ステップS604)。即ち、重み係数選択部56は、副走査境界ラインに対し、検出面の反射係数と反射面同士の面倒れ角度の違い(図12(B)の面倒れ角度θ1とθ2)の複合データに応じて、当該画像に用いる重み係数を重み係数設定テーブル57からとりだし、現像剤消費量演算部58に設定する。
他方、副走査境界ラインではない場合には(ステップS603-NO)、基準面倒れ角度と複合された反射係数に対応した重み係数の選択動作を行う(ステップS605)。即ち、重み係数選択部56は、副走査境界ライン以外のラインに対し、複合される面倒れ角度を基準値として得た重み係数値を現像剤消費量演算部58に設定する。
次いで、現像剤消費量演算部58は、1面目の4画像データD1〜D4にそれぞれに対する現像剤の消費量を設定された重み係数を用いた演算によって算出する(ステップS606)。
この現像剤消費量の演算は、ライン画像の書込みに用いるデータに対し、順次有効画像領域の最終ラインの画像まで、1反射面で同時に書込む4ラインごとに繰り返される。従って、処理フローとしては、有効領域内であることを確認し(ステップS607)、この確認ができれば、再びステップS602に戻して、現像剤消費量の演算を繰り返す。
ステップS607で、有効領域内を外れたことが確認できれば、この処理フローを終了する。
本実施形態では、上記のように、回転多面鏡20の反射係数及び面倒れ角度が各反射面で異なり、且つ1反射面で同時に複数ビームの書込みを行う場合にも、重み係数を変更することにより現像剤消費量を正しい値に調整することが可能になり、所期の目的を達成することができる。
プリント出力の要求時、書込み制御部50は、画像形成の実行指示に従い、画像の書込制御を開始し、感光体ドラム30を光ビームにより走査露光する。この書込制御の一環として、図15に示す現像剤消費量の算出処理のフローを実行する。
図15に示すフローによると、先ず、有効画像領域への書込であることを確認し(ステップS601)、最初の書込対象のライン画像に対する現像剤消費量の算出処理を始める。なお、以下には、1反射面で同時に書込むライン数を4とした場合を例に説明する
始めに、1面目の4ライン書込みに用いている回転多面鏡20の反射面がどの反射面であるか、反射面を検出する(ステップS602)。ここでは、反射面位置検出部51によって、ポリゴンモータの駆動部22から送られてくるミラー面の回転位置を示す位置検知用信号から、例えば6面あれば1〜6のどの面であるかを判定する。
次に、特定された反射面の反射係数と面倒れ角度とを複合させたデータに対応した重み係数を選択する。ただ、ここでは、同一反射面で4ラインずつ画像を書込むので、副走査境界ラインを検出し、副走査境界ラインと、それ以外のラインに異なる重み係数の選択をする。
このため、副走査境界ラインであるか、否かをチェックし(ステップS603)、副走査境界ラインである場合には(ステップS603-YES)、検出反射面の反射係数と面倒れ角度とを複合させたデータに対応した重み係数の選択動作を行う(ステップS604)。即ち、重み係数選択部56は、副走査境界ラインに対し、検出面の反射係数と反射面同士の面倒れ角度の違い(図12(B)の面倒れ角度θ1とθ2)の複合データに応じて、当該画像に用いる重み係数を重み係数設定テーブル57からとりだし、現像剤消費量演算部58に設定する。
他方、副走査境界ラインではない場合には(ステップS603-NO)、基準面倒れ角度と複合された反射係数に対応した重み係数の選択動作を行う(ステップS605)。即ち、重み係数選択部56は、副走査境界ライン以外のラインに対し、複合される面倒れ角度を基準値として得た重み係数値を現像剤消費量演算部58に設定する。
次いで、現像剤消費量演算部58は、1面目の4画像データD1〜D4にそれぞれに対する現像剤の消費量を設定された重み係数を用いた演算によって算出する(ステップS606)。
この現像剤消費量の演算は、ライン画像の書込みに用いるデータに対し、順次有効画像領域の最終ラインの画像まで、1反射面で同時に書込む4ラインごとに繰り返される。従って、処理フローとしては、有効領域内であることを確認し(ステップS607)、この確認ができれば、再びステップS602に戻して、現像剤消費量の演算を繰り返す。
ステップS607で、有効領域内を外れたことが確認できれば、この処理フローを終了する。
本実施形態では、上記のように、回転多面鏡20の反射係数及び面倒れ角度が各反射面で異なり、且つ1反射面で同時に複数ビームの書込みを行う場合にも、重み係数を変更することにより現像剤消費量を正しい値に調整することが可能になり、所期の目的を達成することができる。
「実施形態7」
この実施形態は、算出する現像剤消費量を誤らせる要素である、露光面において生じる光ビームのスポット径の変動に対応して、正しい消費量を算出するための手段を示すものである。
回転多面鏡20の反射面により偏向され、感光体ドラムの露光面上を走査する光ビームは、図4及び図5にて説明したように、同じドットの画像データを用いて書込んでも、主走査方向の中央と端では、ビーム径が変動するために、ビーム径が一定である、とする仮定に従った算出方法によると、現像剤消費量を誤らせる。
そこで、現像剤消費量を算出する際に、対象画像の現像剤消費量を算出する演算に用いる重み係数の設定を、主走査方向の画像書込み位置に応じて変更することにより、上記したスポット径の変動が誤差にならないようにするものである。
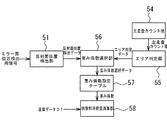
図16は、本実施形態の現像剤消費量算出手段の構成を機能ブロックとして示す。
図16に示す現像剤消費量算出手段は、現像剤消費量演算部58と、現像剤消費量演算部58に重み係数を設定するための手段として、主走査カウント部54、重み係数選択部56及び重み係数設定テーブル57を有する。
重み係数設定テーブル57は、予め実験により回転多面鏡20を用いた主走査手段が有する特性である、主走査方向に生じる光ビームのスポット径の変動と重み係数との関係を求め、得られるデータをテーブルとして、NV(nonvolatile)RAMなどの記憶媒体に格納し、管理する。テーブルとして格納するデータは、露光位置から重み係数を参照する方式に対応するようにしても良い。
主走査カウント部54は、ライン画像の主走査方向の書込み位置を定める主走査カウント値を出力する。
重み係数選択部56は、主走査カウント部54が出力する主走査カウント値をもとに重み係数設定テーブル57を参照して重み係数を選択する操作を行う。重み係数選択データによって重み係数設定テーブル57を参照することにより得られる重み係数は、現像剤消費量演算部58に設定される。
現像剤消費量演算部58は、図16に示す例では、4画像データD1〜D4の単位で演算処理を行うものとしている。これは、発光源として、複数ビーム(この例では4ビーム)を発光するLDアレイを用いているからで、回転多面鏡20の1反射面により同時に書込むライン数の単位で演算処理を行うものとする。従って、発光源として、1ビームを発光するLDを用いる場合には、消費量演算部58に入力される画像データは1ラインで、 走査ラインごとに回転多面鏡20の反射面が変わるので、重み係数もライン単位で設定し直す。
この実施形態は、算出する現像剤消費量を誤らせる要素である、露光面において生じる光ビームのスポット径の変動に対応して、正しい消費量を算出するための手段を示すものである。
回転多面鏡20の反射面により偏向され、感光体ドラムの露光面上を走査する光ビームは、図4及び図5にて説明したように、同じドットの画像データを用いて書込んでも、主走査方向の中央と端では、ビーム径が変動するために、ビーム径が一定である、とする仮定に従った算出方法によると、現像剤消費量を誤らせる。
そこで、現像剤消費量を算出する際に、対象画像の現像剤消費量を算出する演算に用いる重み係数の設定を、主走査方向の画像書込み位置に応じて変更することにより、上記したスポット径の変動が誤差にならないようにするものである。
図16は、本実施形態の現像剤消費量算出手段の構成を機能ブロックとして示す。
図16に示す現像剤消費量算出手段は、現像剤消費量演算部58と、現像剤消費量演算部58に重み係数を設定するための手段として、主走査カウント部54、重み係数選択部56及び重み係数設定テーブル57を有する。
重み係数設定テーブル57は、予め実験により回転多面鏡20を用いた主走査手段が有する特性である、主走査方向に生じる光ビームのスポット径の変動と重み係数との関係を求め、得られるデータをテーブルとして、NV(nonvolatile)RAMなどの記憶媒体に格納し、管理する。テーブルとして格納するデータは、露光位置から重み係数を参照する方式に対応するようにしても良い。
主走査カウント部54は、ライン画像の主走査方向の書込み位置を定める主走査カウント値を出力する。
重み係数選択部56は、主走査カウント部54が出力する主走査カウント値をもとに重み係数設定テーブル57を参照して重み係数を選択する操作を行う。重み係数選択データによって重み係数設定テーブル57を参照することにより得られる重み係数は、現像剤消費量演算部58に設定される。
現像剤消費量演算部58は、図16に示す例では、4画像データD1〜D4の単位で演算処理を行うものとしている。これは、発光源として、複数ビーム(この例では4ビーム)を発光するLDアレイを用いているからで、回転多面鏡20の1反射面により同時に書込むライン数の単位で演算処理を行うものとする。従って、発光源として、1ビームを発光するLDを用いる場合には、消費量演算部58に入力される画像データは1ラインで、 走査ラインごとに回転多面鏡20の反射面が変わるので、重み係数もライン単位で設定し直す。
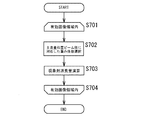
図17を参照して、現像剤消費量算出手段(図16)が行う現像剤消費量の算出処理のフローを説明する。
プリント出力の要求時、書込み制御部50は、画像形成の実行指示に従い、画像の書込制御を開始し、感光体ドラム30を光ビームにより走査露光する。この書込制御の一環として、図17に示す現像剤消費量の算出処理のフローを実行する。
図17に示すフローによると、先ず、有効画像領域への書込であることを確認し(ステップS701)、最初のライン画像に対する現像剤消費量の算出処理を始め、現像剤消費量の算出に必要な重み係数を選択する(ステップS702)。
ここでは、画像データに対応した値を持つドットの配列で表される走査ラインデータに適用する重み係数は、主走査方向の書込み位置に対応した重み係数を選択する。重み係数選択部56は、走査ラインデータの各ドットの書込み位置として、主走査カウント部54により得られる主走査カウント値をもとに、主走査方向の書込み(露光)位置と重み係数を対応付けた重み係数設定テーブル57を参照して、ドットの書込み位置に応じた重み係数を選択し、得られる重み係数を現像剤消費量演算部58に設定する。
重み係数設定テーブル57から設定する重み係数は、ここでは、回転多面鏡20の反射面ごとに切替えないので、走査ビームが単一か複数かによって、ライン画像に適用する重み係数は変わらず、重み係数を共通に使用することができる。
次いで、現像剤消費量演算部58は、同時に書込むライン数の単位で(単一ビームの場合ば画像データD1、4ビームの場合D1 〜D4)各ライン画像に対する現像剤の消費量を設定された重み係数を用いた演算によって算出する(ステップS703)。
この現像剤消費量の演算は、ライン画像の書込みに用いるデータに対し、順次有効画像領域の最終ラインの画像まで繰り返される。従って、処理フローとしては、有効領域内であることを確認し(ステップS704)、この確認ができれば、再びステップS702に戻して、現像剤消費量の演算を繰り返す。
ステップS704で、有効領域内を外れたことが確認できれば、この処理フローを終了する。
本実施形態では、上記のように、露光面において生じる光ビームのスポット径が変動する場合にも、重み係数を変更することにより現像剤消費量を正しい値に調整することが可能になり、所期の目的を達成することができる。
プリント出力の要求時、書込み制御部50は、画像形成の実行指示に従い、画像の書込制御を開始し、感光体ドラム30を光ビームにより走査露光する。この書込制御の一環として、図17に示す現像剤消費量の算出処理のフローを実行する。
図17に示すフローによると、先ず、有効画像領域への書込であることを確認し(ステップS701)、最初のライン画像に対する現像剤消費量の算出処理を始め、現像剤消費量の算出に必要な重み係数を選択する(ステップS702)。
ここでは、画像データに対応した値を持つドットの配列で表される走査ラインデータに適用する重み係数は、主走査方向の書込み位置に対応した重み係数を選択する。重み係数選択部56は、走査ラインデータの各ドットの書込み位置として、主走査カウント部54により得られる主走査カウント値をもとに、主走査方向の書込み(露光)位置と重み係数を対応付けた重み係数設定テーブル57を参照して、ドットの書込み位置に応じた重み係数を選択し、得られる重み係数を現像剤消費量演算部58に設定する。
重み係数設定テーブル57から設定する重み係数は、ここでは、回転多面鏡20の反射面ごとに切替えないので、走査ビームが単一か複数かによって、ライン画像に適用する重み係数は変わらず、重み係数を共通に使用することができる。
次いで、現像剤消費量演算部58は、同時に書込むライン数の単位で(単一ビームの場合ば画像データD1、4ビームの場合D1 〜D4)各ライン画像に対する現像剤の消費量を設定された重み係数を用いた演算によって算出する(ステップS703)。
この現像剤消費量の演算は、ライン画像の書込みに用いるデータに対し、順次有効画像領域の最終ラインの画像まで繰り返される。従って、処理フローとしては、有効領域内であることを確認し(ステップS704)、この確認ができれば、再びステップS702に戻して、現像剤消費量の演算を繰り返す。
ステップS704で、有効領域内を外れたことが確認できれば、この処理フローを終了する。
本実施形態では、上記のように、露光面において生じる光ビームのスポット径が変動する場合にも、重み係数を変更することにより現像剤消費量を正しい値に調整することが可能になり、所期の目的を達成することができる。
「実施形態8」
この実施形態は、上記実施形態7と同様に、露光面において生じる光ビームのスポット径が変動する場合にも正しい消費量を算出する、という目的を持つ現像剤消費量算出手段において、重み係数設定テーブル57の規模を縮小することを意図するものである。
上記実施形態7では、1主走査期間当たりの現像剤消費量算出用重み係数が、最大で主走査ドット(画素)数分となり、重み付け係数設定テーブル57の規模が大きくなってしまうことから、主走査期間を複数エリアに分割し、同一エリア内の重み付け係数を共通化することで、重み付け係数設定テーブルの規模を縮小することを可能にする。
図18は、本実施形態の現像剤消費量算出手段の構成を機能ブロックとして示す。
図18に示す現像剤消費量算出手段は、上記実施形態7に示した構成(図16)をベースに、エリア分割に対応するための付加構成として、エリア判定部55を有するものである。
エリア判定部55は、ライン画像の主走査方向の書込み位置が属するエリアを主走査カウント部54からの主走査カウント値をもとに判定し、エリア判定データを出力する。
重み係数設定テーブル57は、回転多面鏡20を用いた主走査手段によって、主走査方向に生じる光ビームのスポット径の変動と重み係数との関係を予め実験により求め、得られるデータをもとにテーブルで管理するが、ここでは、重み係数を共通化しても支障がでないスポット径の範囲で分割し、定めた主走査エリアデータに対応する重み係数をテーブルとしてNVRAMに格納する。
なお、図18に示す現像剤消費量算出手段における重み係数選択部56は、基本的には、図16と同様に構成し得るが、エリア判定データに応じて、重み係数の選択動作を行うので、当然、対応した構成の変更を必要とする。
この実施形態は、上記実施形態7と同様に、露光面において生じる光ビームのスポット径が変動する場合にも正しい消費量を算出する、という目的を持つ現像剤消費量算出手段において、重み係数設定テーブル57の規模を縮小することを意図するものである。
上記実施形態7では、1主走査期間当たりの現像剤消費量算出用重み係数が、最大で主走査ドット(画素)数分となり、重み付け係数設定テーブル57の規模が大きくなってしまうことから、主走査期間を複数エリアに分割し、同一エリア内の重み付け係数を共通化することで、重み付け係数設定テーブルの規模を縮小することを可能にする。
図18は、本実施形態の現像剤消費量算出手段の構成を機能ブロックとして示す。
図18に示す現像剤消費量算出手段は、上記実施形態7に示した構成(図16)をベースに、エリア分割に対応するための付加構成として、エリア判定部55を有するものである。
エリア判定部55は、ライン画像の主走査方向の書込み位置が属するエリアを主走査カウント部54からの主走査カウント値をもとに判定し、エリア判定データを出力する。
重み係数設定テーブル57は、回転多面鏡20を用いた主走査手段によって、主走査方向に生じる光ビームのスポット径の変動と重み係数との関係を予め実験により求め、得られるデータをもとにテーブルで管理するが、ここでは、重み係数を共通化しても支障がでないスポット径の範囲で分割し、定めた主走査エリアデータに対応する重み係数をテーブルとしてNVRAMに格納する。
なお、図18に示す現像剤消費量算出手段における重み係数選択部56は、基本的には、図16と同様に構成し得るが、エリア判定データに応じて、重み係数の選択動作を行うので、当然、対応した構成の変更を必要とする。
図19を参照して、現像剤消費量算出手段(図18)が行う現像剤消費量の算出処理のフローを説明する。
プリント出力の要求時、書込み制御部50は、画像形成の実行指示に従い、画像の書込制御を開始し、感光体ドラム30を光ビームにより走査露光する。この書込制御の一環として、図19に示す現像剤消費量の算出処理のフローを実行する。
図19に示すフローによると、先ず、有効画像領域への書込であることを確認し(ステップS801)、最初のライン画像に対する現像剤消費量の算出処理を開始する。
始めに、書込むライン画像のエリアを判定する(ステップS802)。ここでは、エリア判定部55によって、当該書込ドットの主走査方向の書込み位置が属するエリアを主走査カウント部54からの主走査カウント値をもとに判定し、エリア判定データを得る。
次に、前段で得たエリア判定データをもとに、エリアデータと重み係数を対応付けた重み係数設定テーブル57を参照して、ドットの書込み位置に応じた重み係数を選択し、得られる重み係数を現像剤消費量演算部58に設定する(ステップS803)。
重み係数設定テーブル57から設定する重み係数は、ここでは、回転多面鏡20の反射面ごとに切替えないので、走査ビームが単一か複数かによって、ライン画像に適用する重み係数は変わらず、重み係数を共通に使用することができる。
次いで、現像剤消費量演算部58は、同時に書込むライン数の単位で(単一ビームの場合ば画像データD1、4ビームの場合D1 〜D4)各ライン画像に対する現像剤の消費量を設定された重み係数を用いた演算によって算出する(ステップS804)。
この現像剤消費量の演算は、ライン画像の書込みに用いるデータに対し、順次有効画像領域の最終ラインの画像まで繰り返される。従って、処理フローとしては、有効領域内であることを確認し(ステップS805)、この確認ができれば、再びステップS802に戻して、現像剤消費量の演算を繰り返す。
ステップS805で、有効領域内を外れたことが確認できれば、この処理フローを終了する。
本実施形態では、上記のように、処理対象のライン画像に対し、エリア分割方式を導入することによって、重み付け係数設定テーブルの規模を縮小する、という所期の目的を達成することができる。
プリント出力の要求時、書込み制御部50は、画像形成の実行指示に従い、画像の書込制御を開始し、感光体ドラム30を光ビームにより走査露光する。この書込制御の一環として、図19に示す現像剤消費量の算出処理のフローを実行する。
図19に示すフローによると、先ず、有効画像領域への書込であることを確認し(ステップS801)、最初のライン画像に対する現像剤消費量の算出処理を開始する。
始めに、書込むライン画像のエリアを判定する(ステップS802)。ここでは、エリア判定部55によって、当該書込ドットの主走査方向の書込み位置が属するエリアを主走査カウント部54からの主走査カウント値をもとに判定し、エリア判定データを得る。
次に、前段で得たエリア判定データをもとに、エリアデータと重み係数を対応付けた重み係数設定テーブル57を参照して、ドットの書込み位置に応じた重み係数を選択し、得られる重み係数を現像剤消費量演算部58に設定する(ステップS803)。
重み係数設定テーブル57から設定する重み係数は、ここでは、回転多面鏡20の反射面ごとに切替えないので、走査ビームが単一か複数かによって、ライン画像に適用する重み係数は変わらず、重み係数を共通に使用することができる。
次いで、現像剤消費量演算部58は、同時に書込むライン数の単位で(単一ビームの場合ば画像データD1、4ビームの場合D1 〜D4)各ライン画像に対する現像剤の消費量を設定された重み係数を用いた演算によって算出する(ステップS804)。
この現像剤消費量の演算は、ライン画像の書込みに用いるデータに対し、順次有効画像領域の最終ラインの画像まで繰り返される。従って、処理フローとしては、有効領域内であることを確認し(ステップS805)、この確認ができれば、再びステップS802に戻して、現像剤消費量の演算を繰り返す。
ステップS805で、有効領域内を外れたことが確認できれば、この処理フローを終了する。
本実施形態では、上記のように、処理対象のライン画像に対し、エリア分割方式を導入することによって、重み付け係数設定テーブルの規模を縮小する、という所期の目的を達成することができる。
「実施形態9」
上記実施形態7では、現像剤消費量の算出において、誤差要因として、感光体を露光する光ビームのスポット径の主走査方向に生じる変動を考慮し、上記実施形態5では、誤差要因として、回転多面鏡20の各反射面における反射係数、面倒れ角度の相違を考慮し、それぞれが別に生じた場合に対応する手段を示したが、この実施形態では、これらの誤差要因が複合して生じる場合に対応して、正しい消費量を算出するための手段を示すものである。
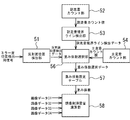
図20は、本実施形態の現像剤消費量算出手段の構成を示す。図20の構成に示すように、光ビームのスポット径の主走査方向に生じる変動に対応する手段として示した図16(実施形態7)の構成に、回転多面鏡20の各反射面における反射係数、面倒れ角度に対応するための手段として、反射面位置検出部51を付加している。
また、重み係数選択部56は、上記変動要素が複合する場合に応じて、当該画像に用いる重み係数を重み係数設定テーブル57からとりだし、現像剤消費量演算部58に設定し、
さらに、重み係数設定テーブル57は、本実施形態では、反射係数と面倒れ角度と、さらに光ビームスポット径の主走査方向に生じる変動を複合させたデータと重み係数の関係をテーブルとして、NVRAMなどの記憶媒体に格納し、管理する。
上記実施形態7では、現像剤消費量の算出において、誤差要因として、感光体を露光する光ビームのスポット径の主走査方向に生じる変動を考慮し、上記実施形態5では、誤差要因として、回転多面鏡20の各反射面における反射係数、面倒れ角度の相違を考慮し、それぞれが別に生じた場合に対応する手段を示したが、この実施形態では、これらの誤差要因が複合して生じる場合に対応して、正しい消費量を算出するための手段を示すものである。
図20は、本実施形態の現像剤消費量算出手段の構成を示す。図20の構成に示すように、光ビームのスポット径の主走査方向に生じる変動に対応する手段として示した図16(実施形態7)の構成に、回転多面鏡20の各反射面における反射係数、面倒れ角度に対応するための手段として、反射面位置検出部51を付加している。
また、重み係数選択部56は、上記変動要素が複合する場合に応じて、当該画像に用いる重み係数を重み係数設定テーブル57からとりだし、現像剤消費量演算部58に設定し、
さらに、重み係数設定テーブル57は、本実施形態では、反射係数と面倒れ角度と、さらに光ビームスポット径の主走査方向に生じる変動を複合させたデータと重み係数の関係をテーブルとして、NVRAMなどの記憶媒体に格納し、管理する。
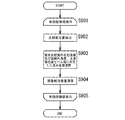
図21は、本実施形態の現像剤消費量算出手段が行う現像剤消費量の算出処理のフローを示す。
プリント出力の要求時、書込み制御部50は、画像形成の実行指示に従い、画像の書込制御を開始し、感光体ドラム30を光ビームにより走査露光する。この書込制御の一環として、図21に示す現像剤消費量の算出処理のフローを実行する。
図21に示すフローによると、先ず、有効画像領域への書込であることを確認し(ステップS901)、最初のライン画像に対する現像剤消費量の算出処理を始める。
始めに、1ライン目の画像の書込みに用いている回転多面鏡20の反射面がどの反射面であるか、反射面を検出する(ステップS902)。ここでは、反射面位置検出部51によって、ポリゴンモータの駆動部22から送られてくるミラー面の回転位置を示す位置検知用信号から、例えば6面あれば1〜6のどの面であるかを判定する。
次に、特定された反射面の反射係数及び面倒れ角度と、走査ラインデータの各ドットの書込み位置の複合データに対応した重み係数を選択する(ステップS903)。なお、複合される上記各データの取得方法は、上記実施形態5,7に記載されている。また、このステップにおける動作として、重み係数選択部56は、上記複合データと重み係数を対応付けた重み係数設定テーブル57を参照して、使用する反射面の反射係数及び面倒れ角度と、ドットの書込み位置に応じた重み係数を選択し、得られる重み係数を現像剤消費量演算部58に設定する。
次いで、現像剤消費量演算部58は、1ライン目の画像データD1に対する現像剤の消費量を設定された重み係数を用いた演算によって算出する(ステップS904)。
この現像剤消費量の演算は、ライン画像の書込みに用いるデータに対し、順次有効画像領域の最終ラインの画像まで、ラインごとに繰り返される。従って、処理フローとしては、有効領域内であることを確認し(ステップS905)、この確認ができれば、再びステップS902に戻して、現像剤消費量の演算を繰り返す。
ステップS905で、有効領域内を外れたことが確認できれば、この処理フローを終了する。
本実施形態では、上記のように、回転多面鏡20の反射係数及び面倒れ角度が各反射面で異なり、さらに光ビームスポット径の主走査方向に生じる変動がある場合に、重み係数を変更することにより現像剤消費量を正しい値に調整することが可能になり、所期の目的を達成することができる。
プリント出力の要求時、書込み制御部50は、画像形成の実行指示に従い、画像の書込制御を開始し、感光体ドラム30を光ビームにより走査露光する。この書込制御の一環として、図21に示す現像剤消費量の算出処理のフローを実行する。
図21に示すフローによると、先ず、有効画像領域への書込であることを確認し(ステップS901)、最初のライン画像に対する現像剤消費量の算出処理を始める。
始めに、1ライン目の画像の書込みに用いている回転多面鏡20の反射面がどの反射面であるか、反射面を検出する(ステップS902)。ここでは、反射面位置検出部51によって、ポリゴンモータの駆動部22から送られてくるミラー面の回転位置を示す位置検知用信号から、例えば6面あれば1〜6のどの面であるかを判定する。
次に、特定された反射面の反射係数及び面倒れ角度と、走査ラインデータの各ドットの書込み位置の複合データに対応した重み係数を選択する(ステップS903)。なお、複合される上記各データの取得方法は、上記実施形態5,7に記載されている。また、このステップにおける動作として、重み係数選択部56は、上記複合データと重み係数を対応付けた重み係数設定テーブル57を参照して、使用する反射面の反射係数及び面倒れ角度と、ドットの書込み位置に応じた重み係数を選択し、得られる重み係数を現像剤消費量演算部58に設定する。
次いで、現像剤消費量演算部58は、1ライン目の画像データD1に対する現像剤の消費量を設定された重み係数を用いた演算によって算出する(ステップS904)。
この現像剤消費量の演算は、ライン画像の書込みに用いるデータに対し、順次有効画像領域の最終ラインの画像まで、ラインごとに繰り返される。従って、処理フローとしては、有効領域内であることを確認し(ステップS905)、この確認ができれば、再びステップS902に戻して、現像剤消費量の演算を繰り返す。
ステップS905で、有効領域内を外れたことが確認できれば、この処理フローを終了する。
本実施形態では、上記のように、回転多面鏡20の反射係数及び面倒れ角度が各反射面で異なり、さらに光ビームスポット径の主走査方向に生じる変動がある場合に、重み係数を変更することにより現像剤消費量を正しい値に調整することが可能になり、所期の目的を達成することができる。
「実施形態10」
この実施形態は、回転多面鏡20の反射係数及び面倒れ角度が各反射面で異なり、さらに光ビームスポット径の主走査方向に生じる変動がある場合に、正しい消費量を算出する点で、上記実施形態9と同様の目的を持つが、発光源にLDアレイを用い、複数ビームで走査を行う場合に対応するものである。
複数ビームで走査を行う場合には、図8の4ビームの例に示すように、回転多面鏡20の1反射面による感光面の1走査でライン1〜4を同時に書込み、この後、副走査方向にシフトさせ、次の反射面による4ビームの走査でライン5〜8を同時に書込む。この走査方式において、露光条件は、反射面において異なり、この違いが算出する現像剤消費量を誤らせる要素となることから、この変動要素に対応して、正しい消費量を算出するための手段を示すものである。
ここでは、現像剤消費量を算出する際に、画像の書込みに用いている回転多面鏡20の反射面を特定するとともに、1反射面で同時に書込む複数ライン画像中の境界ラインを検出して、当該画像の現像剤消費量を算出する演算に用いる重み係数の設定を、反射面ごとに区切って、各面に応じた係数に変更することにより、この変動要素の違いが誤差にならないようにするものである。
図22は、本実施形態の現像剤消費量算出手段の構成を機能ブロックとして示す。
図22に示す現像剤消費量算出手段は、上記実施形態9に示した構成(図20)をベースに、回転多面鏡20の反射面の切替わりに対応するための付加構成として、副走査カウント部52と副走査境界ライン検出部53を有するものである。
副走査カウント部52は、ライン画像の副走査方向の書込み位置を定める副走査カウント値を出力する。
副走査境界ライン検出部53は、副走査カウント部52から渡される副走査カウント値と、1反射面による走査で同時に書込むライン数(図示の例では、4ライン)をもとに、副走査境界ラインを検出する。
なお、図22に示す現像剤消費量算出手段における重み係数選択部56及び重み係数設定テーブル57は、基本的には、図20と同様に構成し得るが、副走査境界ラインであるか、否かを示す副走査境界ライン検出データに応じて、重み係数の選択動作を行うので、当然、対応した構成の変更を必要とする。
また、現像剤消費量演算部58についても、回転多面鏡20の1反射面で同時に複数ラインを書込み、次の反射面に切替えて、同時に複数ラインの書込みを行うので、1反射面で書込むライン数の単位(この例では、4画像データD1〜D4の単位)で演算処理を行うものとする。
この実施形態は、回転多面鏡20の反射係数及び面倒れ角度が各反射面で異なり、さらに光ビームスポット径の主走査方向に生じる変動がある場合に、正しい消費量を算出する点で、上記実施形態9と同様の目的を持つが、発光源にLDアレイを用い、複数ビームで走査を行う場合に対応するものである。
複数ビームで走査を行う場合には、図8の4ビームの例に示すように、回転多面鏡20の1反射面による感光面の1走査でライン1〜4を同時に書込み、この後、副走査方向にシフトさせ、次の反射面による4ビームの走査でライン5〜8を同時に書込む。この走査方式において、露光条件は、反射面において異なり、この違いが算出する現像剤消費量を誤らせる要素となることから、この変動要素に対応して、正しい消費量を算出するための手段を示すものである。
ここでは、現像剤消費量を算出する際に、画像の書込みに用いている回転多面鏡20の反射面を特定するとともに、1反射面で同時に書込む複数ライン画像中の境界ラインを検出して、当該画像の現像剤消費量を算出する演算に用いる重み係数の設定を、反射面ごとに区切って、各面に応じた係数に変更することにより、この変動要素の違いが誤差にならないようにするものである。
図22は、本実施形態の現像剤消費量算出手段の構成を機能ブロックとして示す。
図22に示す現像剤消費量算出手段は、上記実施形態9に示した構成(図20)をベースに、回転多面鏡20の反射面の切替わりに対応するための付加構成として、副走査カウント部52と副走査境界ライン検出部53を有するものである。
副走査カウント部52は、ライン画像の副走査方向の書込み位置を定める副走査カウント値を出力する。
副走査境界ライン検出部53は、副走査カウント部52から渡される副走査カウント値と、1反射面による走査で同時に書込むライン数(図示の例では、4ライン)をもとに、副走査境界ラインを検出する。
なお、図22に示す現像剤消費量算出手段における重み係数選択部56及び重み係数設定テーブル57は、基本的には、図20と同様に構成し得るが、副走査境界ラインであるか、否かを示す副走査境界ライン検出データに応じて、重み係数の選択動作を行うので、当然、対応した構成の変更を必要とする。
また、現像剤消費量演算部58についても、回転多面鏡20の1反射面で同時に複数ラインを書込み、次の反射面に切替えて、同時に複数ラインの書込みを行うので、1反射面で書込むライン数の単位(この例では、4画像データD1〜D4の単位)で演算処理を行うものとする。
図23を参照して、現像剤消費量算出手段(図22)が行う現像剤消費量の算出処理のフローを説明する。
プリント出力の要求時、書込み制御部50は、画像形成の実行指示に従い、画像の書込制御を開始し、感光体ドラム30を光ビームにより走査露光する。この書込制御の一環として、図23に示す現像剤消費量の算出処理のフローを実行する。
図23に示すフローによると、先ず、有効画像領域への書込であることを確認し(ステップS1001)、最初の書込対象のライン画像に対する現像剤消費量の算出処理を始める。なお、以下には、1反射面で同時に書込むライン数を4とした場合を例に説明する
始めに、1面目の4ライン書込みに用いている回転多面鏡20の反射面がどの反射面であるか、反射面を検出する(ステップS1002)。ここでは、反射面位置検出部51によって、ポリゴンモータの駆動部22から送られてくるミラー面の回転位置を示す位置検知用信号から、例えば6面あれば1〜6のどの面であるかを判定する。
次に、特定された反射面の反射係数及び面倒れ角度と、走査ラインデータの各ドットの書込み位置の複合データに対応した重み係数を選択する。ただ、ここでは、同一反射面で4ラインずつ画像を書込むので、副走査境界ラインを検出し、副走査境界ラインと、それ以外のラインに異なる重み係数の選択をする。
このため、副走査境界ラインであるか、否かをチェックし(ステップS1003)、副走査境界ラインである場合には(ステップS1003-YES)、上記複合データに対応した重み係数の選択動作を行う(ステップS1004)。即ち、重み係数選択部56は、副走査境界ラインに対し、検出面の反射係数と反射面同士の面倒れ角度の違い(図12(B)の面倒れ角度θ1とθ2)と、ドットを書込む主走査カウント値の複合データに応じて、当該画像に用いる重み係数を重み係数設定テーブル57からとりだし、現像剤消費量演算部58に設定する。
他方、副走査境界ラインではない場合には(ステップS1003-NO)、基準面倒れ角度及び複合された反射係数と、ドットの書込み位置に対応した重み係数の選択動作を行う(ステップS1005)。即ち、重み係数選択部56は、副走査境界ライン以外のラインに対し、複合される面倒れ角度を基準値とし、得た重み係数値を現像剤消費量演算部58に設定する。
次いで、現像剤消費量演算部58は、1面目の4画像データD1〜D4にそれぞれに対する現像剤の消費量を設定された重み係数を用いた演算によって算出する(ステップS1006)。
この現像剤消費量の演算は、ライン画像の書込みに用いるデータに対し、順次有効画像領域の最終ラインの画像まで、1反射面で同時に書込む4ラインごとに繰り返される。従って、処理フローとしては、有効領域内であることを確認し(ステップS1007)、この確認ができれば、再びステップS1002に戻して、現像剤消費量の演算を繰り返す。
ステップS1007で、有効領域内を外れたことが確認できれば、この処理フローを終了する。
本実施形態では、上記のように、回転多面鏡20の反射係数及び面倒れ角度が各反射面で異なり、さらに光ビームスポット径の主走査方向に生じる変動があり、且つ1反射面で同時に複数ビームの書込みを行う場合にも、重み係数を変更することにより現像剤消費量を正しい値に調整することが可能になり、所期の目的を達成することができる。
プリント出力の要求時、書込み制御部50は、画像形成の実行指示に従い、画像の書込制御を開始し、感光体ドラム30を光ビームにより走査露光する。この書込制御の一環として、図23に示す現像剤消費量の算出処理のフローを実行する。
図23に示すフローによると、先ず、有効画像領域への書込であることを確認し(ステップS1001)、最初の書込対象のライン画像に対する現像剤消費量の算出処理を始める。なお、以下には、1反射面で同時に書込むライン数を4とした場合を例に説明する
始めに、1面目の4ライン書込みに用いている回転多面鏡20の反射面がどの反射面であるか、反射面を検出する(ステップS1002)。ここでは、反射面位置検出部51によって、ポリゴンモータの駆動部22から送られてくるミラー面の回転位置を示す位置検知用信号から、例えば6面あれば1〜6のどの面であるかを判定する。
次に、特定された反射面の反射係数及び面倒れ角度と、走査ラインデータの各ドットの書込み位置の複合データに対応した重み係数を選択する。ただ、ここでは、同一反射面で4ラインずつ画像を書込むので、副走査境界ラインを検出し、副走査境界ラインと、それ以外のラインに異なる重み係数の選択をする。
このため、副走査境界ラインであるか、否かをチェックし(ステップS1003)、副走査境界ラインである場合には(ステップS1003-YES)、上記複合データに対応した重み係数の選択動作を行う(ステップS1004)。即ち、重み係数選択部56は、副走査境界ラインに対し、検出面の反射係数と反射面同士の面倒れ角度の違い(図12(B)の面倒れ角度θ1とθ2)と、ドットを書込む主走査カウント値の複合データに応じて、当該画像に用いる重み係数を重み係数設定テーブル57からとりだし、現像剤消費量演算部58に設定する。
他方、副走査境界ラインではない場合には(ステップS1003-NO)、基準面倒れ角度及び複合された反射係数と、ドットの書込み位置に対応した重み係数の選択動作を行う(ステップS1005)。即ち、重み係数選択部56は、副走査境界ライン以外のラインに対し、複合される面倒れ角度を基準値とし、得た重み係数値を現像剤消費量演算部58に設定する。
次いで、現像剤消費量演算部58は、1面目の4画像データD1〜D4にそれぞれに対する現像剤の消費量を設定された重み係数を用いた演算によって算出する(ステップS1006)。
この現像剤消費量の演算は、ライン画像の書込みに用いるデータに対し、順次有効画像領域の最終ラインの画像まで、1反射面で同時に書込む4ラインごとに繰り返される。従って、処理フローとしては、有効領域内であることを確認し(ステップS1007)、この確認ができれば、再びステップS1002に戻して、現像剤消費量の演算を繰り返す。
ステップS1007で、有効領域内を外れたことが確認できれば、この処理フローを終了する。
本実施形態では、上記のように、回転多面鏡20の反射係数及び面倒れ角度が各反射面で異なり、さらに光ビームスポット径の主走査方向に生じる変動があり、且つ1反射面で同時に複数ビームの書込みを行う場合にも、重み係数を変更することにより現像剤消費量を正しい値に調整することが可能になり、所期の目的を達成することができる。
「実施形態11」
この実施形態は、上記実施形態9と同様に、回転多面鏡20の反射係数及び面倒れ角度が各反射面で異なり、さらに光ビームスポット径の主走査方向に生じる変動がある場合に正しい消費量を算出する、という目的を持つ現像剤消費量算出手段において、重み係数設定テーブル57の規模を縮小することを意図するものである。
上記実施形態9では、1主走査期間当たりの現像剤消費量算出用重み係数が、最大で主走査ドット(画素)数分となり、重み付け係数設定テーブル57の規模が大きくなってしまうことから、主走査期間を複数エリアに分割し、同一エリア内の重み付け係数を共通化することで、重み付け係数設定テーブルの規模を縮小することを可能にする。
図24は、本実施形態の現像剤消費量算出手段の構成を機能ブロックとして示す。
図24に示す現像剤消費量算出手段は、上記実施形態9に示した構成(図20)をベースに、エリア分割に対応するための付加構成として、エリア判定部55を有するものである。
エリア判定部55は、ライン画像の主走査方向の書込み位置が属するエリアを主走査カウント部54からの主走査カウント値をもとに判定し、エリア判定データを出力する。
重み係数設定テーブル57は、回転多面鏡20の反射係数、面倒れ角度、及び光ビームスポット径の主走査方向に生じる変動を複合させたデータと重み係数との関係をテーブルとして、管理するが、ここでは、重み係数を共通化しても支障がでないスポット径の範囲で分割し、定めた主走査エリアデータに対応する重み係数をテーブルとして、NVRAMに格納する。
なお、図24に示す現像剤消費量算出手段における重み係数選択部56は、基本的には、図20と同様に構成し得るが、エリア判定データに応じて、重み係数の選択動作を行うので、当然、対応した構成の変更を必要とする。
この実施形態は、上記実施形態9と同様に、回転多面鏡20の反射係数及び面倒れ角度が各反射面で異なり、さらに光ビームスポット径の主走査方向に生じる変動がある場合に正しい消費量を算出する、という目的を持つ現像剤消費量算出手段において、重み係数設定テーブル57の規模を縮小することを意図するものである。
上記実施形態9では、1主走査期間当たりの現像剤消費量算出用重み係数が、最大で主走査ドット(画素)数分となり、重み付け係数設定テーブル57の規模が大きくなってしまうことから、主走査期間を複数エリアに分割し、同一エリア内の重み付け係数を共通化することで、重み付け係数設定テーブルの規模を縮小することを可能にする。
図24は、本実施形態の現像剤消費量算出手段の構成を機能ブロックとして示す。
図24に示す現像剤消費量算出手段は、上記実施形態9に示した構成(図20)をベースに、エリア分割に対応するための付加構成として、エリア判定部55を有するものである。
エリア判定部55は、ライン画像の主走査方向の書込み位置が属するエリアを主走査カウント部54からの主走査カウント値をもとに判定し、エリア判定データを出力する。
重み係数設定テーブル57は、回転多面鏡20の反射係数、面倒れ角度、及び光ビームスポット径の主走査方向に生じる変動を複合させたデータと重み係数との関係をテーブルとして、管理するが、ここでは、重み係数を共通化しても支障がでないスポット径の範囲で分割し、定めた主走査エリアデータに対応する重み係数をテーブルとして、NVRAMに格納する。
なお、図24に示す現像剤消費量算出手段における重み係数選択部56は、基本的には、図20と同様に構成し得るが、エリア判定データに応じて、重み係数の選択動作を行うので、当然、対応した構成の変更を必要とする。
図25は、本実施形態の現像剤消費量算出手段が行う現像剤消費量の算出処理のフローを示す。
プリント出力の要求時、書込み制御部50は、画像形成の実行指示に従い、画像の書込制御を開始し、感光体ドラム30を光ビームにより走査露光する。この書込制御の一環として、図25に示す現像剤消費量の算出処理のフローを実行する。
図25に示すフローによると、先ず、有効画像領域への書込であることを確認し(ステップS1101)、最初のライン画像に対する現像剤消費量の算出処理を始める。
始めに、1ライン目の画像の書込みに用いている回転多面鏡20の反射面がどの反射面であるか、反射面を検出する(ステップS1102)。ここでは、反射面位置検出部51によって、ポリゴンモータの駆動部22から送られてくるミラー面の回転位置を示す位置検知用信号から、例えば6面あれば1〜6のどの面であるかを判定する。
次に、書込むライン画像のエリアを判定する(ステップS1103)。ここでは、エリア判定部55によって、当該書込ドットの主走査方向の書込み位置が属するエリアを主走査カウント部54からの主走査カウント値をもとに判定し、エリア判定データを得る。
次に、ステップS1102で特定された反射面の反射係数及び面倒れ角度と、ステップS1103で得たエリア判定データよりなる複合データをもとに、これらの複合データと重み係数を対応付けた重み係数設定テーブル57を参照して、当該ドットに応じた重み係数を選択し、得られる重み係数を現像剤消費量演算部58に設定する(ステップS1104)。
次いで、現像剤消費量演算部58は、1ライン目の画像データD1に対する現像剤の消費量を設定された重み係数を用いた演算によって算出する(ステップS1105)。
この現像剤消費量の演算は、ライン画像の書込みに用いるデータに対し、順次有効画像領域の最終ラインの画像まで、ラインごとに繰り返される。従って、処理フローとしては、有効領域内であることを確認し(ステップS1106)、この確認ができれば、再びステップS1102に戻して、現像剤消費量の演算を繰り返す。
ステップS1106で、有効領域内を外れたことが確認できれば、この処理フローを終了する。
本実施形態では、上記のように、処理対象のライン画像に対し、エリア分割方式を導入することによって、重み付け係数設定テーブルの規模を縮小する、という所期の目的を達成することができる。
プリント出力の要求時、書込み制御部50は、画像形成の実行指示に従い、画像の書込制御を開始し、感光体ドラム30を光ビームにより走査露光する。この書込制御の一環として、図25に示す現像剤消費量の算出処理のフローを実行する。
図25に示すフローによると、先ず、有効画像領域への書込であることを確認し(ステップS1101)、最初のライン画像に対する現像剤消費量の算出処理を始める。
始めに、1ライン目の画像の書込みに用いている回転多面鏡20の反射面がどの反射面であるか、反射面を検出する(ステップS1102)。ここでは、反射面位置検出部51によって、ポリゴンモータの駆動部22から送られてくるミラー面の回転位置を示す位置検知用信号から、例えば6面あれば1〜6のどの面であるかを判定する。
次に、書込むライン画像のエリアを判定する(ステップS1103)。ここでは、エリア判定部55によって、当該書込ドットの主走査方向の書込み位置が属するエリアを主走査カウント部54からの主走査カウント値をもとに判定し、エリア判定データを得る。
次に、ステップS1102で特定された反射面の反射係数及び面倒れ角度と、ステップS1103で得たエリア判定データよりなる複合データをもとに、これらの複合データと重み係数を対応付けた重み係数設定テーブル57を参照して、当該ドットに応じた重み係数を選択し、得られる重み係数を現像剤消費量演算部58に設定する(ステップS1104)。
次いで、現像剤消費量演算部58は、1ライン目の画像データD1に対する現像剤の消費量を設定された重み係数を用いた演算によって算出する(ステップS1105)。
この現像剤消費量の演算は、ライン画像の書込みに用いるデータに対し、順次有効画像領域の最終ラインの画像まで、ラインごとに繰り返される。従って、処理フローとしては、有効領域内であることを確認し(ステップS1106)、この確認ができれば、再びステップS1102に戻して、現像剤消費量の演算を繰り返す。
ステップS1106で、有効領域内を外れたことが確認できれば、この処理フローを終了する。
本実施形態では、上記のように、処理対象のライン画像に対し、エリア分割方式を導入することによって、重み付け係数設定テーブルの規模を縮小する、という所期の目的を達成することができる。
「実施形態12」
この実施形態は、回転多面鏡20の反射係数及び面倒れ角度が各反射面で異なり、さらに光ビームスポット径の主走査方向に生じる変動がある場合に正しい消費量を算出する処理の対象ライン画像に対し、エリア分割方式を導入する点で、上記実施形態11と同様の目的を持つが、発光源にLDアレイを用い、複数ビームで走査を行う場合に対応するものである。
複数ビームで走査を行う場合には、図8の4ビームの例に示すように、回転多面鏡20の1反射面による感光面の1走査でライン1〜4を同時に書込み、この後、副走査方向にシフトさせ、次の反射面による4ビームの走査でライン5〜8を同時に書込む。この走査方式において、露光条件は、反射面において異なり、この違いが算出する現像剤消費量を誤らせる要素となることから、この変動要素に対応して、正しい消費量を算出するための手段を示すものである。
ここでは、現像剤消費量を算出する際に、画像の書込みに用いている回転多面鏡20の反射面を特定するとともに、1反射面で同時に書込む複数ライン画像中の境界ラインを検出して、当該画像の現像剤消費量を算出する演算に用いる重み係数の設定を、反射面ごとに区切って、各面に応じた係数に変更することにより、この変動要素の違いが誤差にならないようにするものである。
この実施形態は、回転多面鏡20の反射係数及び面倒れ角度が各反射面で異なり、さらに光ビームスポット径の主走査方向に生じる変動がある場合に正しい消費量を算出する処理の対象ライン画像に対し、エリア分割方式を導入する点で、上記実施形態11と同様の目的を持つが、発光源にLDアレイを用い、複数ビームで走査を行う場合に対応するものである。
複数ビームで走査を行う場合には、図8の4ビームの例に示すように、回転多面鏡20の1反射面による感光面の1走査でライン1〜4を同時に書込み、この後、副走査方向にシフトさせ、次の反射面による4ビームの走査でライン5〜8を同時に書込む。この走査方式において、露光条件は、反射面において異なり、この違いが算出する現像剤消費量を誤らせる要素となることから、この変動要素に対応して、正しい消費量を算出するための手段を示すものである。
ここでは、現像剤消費量を算出する際に、画像の書込みに用いている回転多面鏡20の反射面を特定するとともに、1反射面で同時に書込む複数ライン画像中の境界ラインを検出して、当該画像の現像剤消費量を算出する演算に用いる重み係数の設定を、反射面ごとに区切って、各面に応じた係数に変更することにより、この変動要素の違いが誤差にならないようにするものである。
図26は、本実施形態の現像剤消費量算出手段の構成を機能ブロックとして示す。
図26に示す現像剤消費量算出手段は、上記実施形態11に示した構成(図24)をベースに、回転多面鏡20の反射面の切替わりに対応するための付加構成として、副走査カウント部52と副走査境界ライン検出部53を有するものである。
副走査カウント部52は、ライン画像の副走査方向の書込み位置を定める副走査カウント値を出力する。
副走査境界ライン検出部53は、副走査カウント部52から渡される副走査カウント値と、1反射面による走査で同時に書込むライン数(図示の例では、4ライン)をもとに、副走査境界ラインを検出する。
なお、図26に示す現像剤消費量算出手段における重み係数選択部56及び重み係数設定テーブル57は、基本的には、図24と同様に構成し得るが、副走査境界ラインであるか、否かを示す副走査境界ライン検出データに応じて、重み係数の選択動作を行うので、当然、対応した構成の変更を必要とする。
また、現像剤消費量演算部58についても、回転多面鏡20の1反射面で同時に複数ラインを書込み、次の反射面に切替えて、同時に複数ラインの書込みを行うので、1反射面で書込むライン数の単位(この例では、4画像データD1〜D4の単位)で演算処理を行うものとする。
図26に示す現像剤消費量算出手段は、上記実施形態11に示した構成(図24)をベースに、回転多面鏡20の反射面の切替わりに対応するための付加構成として、副走査カウント部52と副走査境界ライン検出部53を有するものである。
副走査カウント部52は、ライン画像の副走査方向の書込み位置を定める副走査カウント値を出力する。
副走査境界ライン検出部53は、副走査カウント部52から渡される副走査カウント値と、1反射面による走査で同時に書込むライン数(図示の例では、4ライン)をもとに、副走査境界ラインを検出する。
なお、図26に示す現像剤消費量算出手段における重み係数選択部56及び重み係数設定テーブル57は、基本的には、図24と同様に構成し得るが、副走査境界ラインであるか、否かを示す副走査境界ライン検出データに応じて、重み係数の選択動作を行うので、当然、対応した構成の変更を必要とする。
また、現像剤消費量演算部58についても、回転多面鏡20の1反射面で同時に複数ラインを書込み、次の反射面に切替えて、同時に複数ラインの書込みを行うので、1反射面で書込むライン数の単位(この例では、4画像データD1〜D4の単位)で演算処理を行うものとする。
図27を参照して、現像剤消費量算出手段(図26)が行う現像剤消費量の算出処理のフローを説明する。
プリント出力の要求時、書込み制御部50は、画像形成の実行指示に従い、画像の書込制御を開始し、感光体ドラム30を光ビームにより走査露光する。この書込制御の一環として、図27に示す現像剤消費量の算出処理のフローを実行する。
図27に示すフローによると、先ず、有効画像領域への書込であることを確認し(ステップS1201)、最初の書込対象のライン画像に対する現像剤消費量の算出処理を始める。なお、以下には、1反射面で同時に書込むライン数を4とした場合を例に説明する
始めに、1面目の4ライン書込みに用いている回転多面鏡20の反射面がどの反射面であるか、反射面を検出する(ステップS1202)。ここでは、反射面位置検出部51によって、ポリゴンモータの駆動部22から送られてくるミラー面の回転位置を示す位置検知用信号から、例えば6面あれば1〜6のどの面であるかを判定する。
次に、特定された反射面の反射係数及び面倒れ角度と、走査ラインデータの各ドットの書込み位置の複合データに対応した重み係数を選択する。ただ、ここでは、同一反射面で4ラインずつ画像を書込むので、副走査境界ラインを検出し、副走査境界ラインと、それ以外のラインに異なる重み係数の選択をする。
このため、副走査境界ラインであるか、否かをチェックし(ステップS1203)、副走査境界ラインである場合には(ステップS1203-YES)、上記複合データに対応した重み係数の選択動作を行う(ステップS1205)。即ち、重み係数選択部56は、副走査境界ラインに対し、検出面の反射係数と反射面同士の面倒れ角度の違い(図12(B)の面倒れ角度θ1とθ2)と、ドットを書込む主走査カウント値の複合データに応じて、当該画像に用いる重み係数を重み係数設定テーブル57からとりだし、現像剤消費量演算部58に設定する。ただ、重み係数設定テーブル57を参照するために用いる上記複合データ中のドットを書込む主走査カウント値は、エリア分割を導入しているので、重み係数の選択をする前に、エリア判定を行い(ステップS1204)、得たエリア判定データをステップS1205の参照に用いる複合データ中のドット書込み位置を表すデータとして用いる。
プリント出力の要求時、書込み制御部50は、画像形成の実行指示に従い、画像の書込制御を開始し、感光体ドラム30を光ビームにより走査露光する。この書込制御の一環として、図27に示す現像剤消費量の算出処理のフローを実行する。
図27に示すフローによると、先ず、有効画像領域への書込であることを確認し(ステップS1201)、最初の書込対象のライン画像に対する現像剤消費量の算出処理を始める。なお、以下には、1反射面で同時に書込むライン数を4とした場合を例に説明する
始めに、1面目の4ライン書込みに用いている回転多面鏡20の反射面がどの反射面であるか、反射面を検出する(ステップS1202)。ここでは、反射面位置検出部51によって、ポリゴンモータの駆動部22から送られてくるミラー面の回転位置を示す位置検知用信号から、例えば6面あれば1〜6のどの面であるかを判定する。
次に、特定された反射面の反射係数及び面倒れ角度と、走査ラインデータの各ドットの書込み位置の複合データに対応した重み係数を選択する。ただ、ここでは、同一反射面で4ラインずつ画像を書込むので、副走査境界ラインを検出し、副走査境界ラインと、それ以外のラインに異なる重み係数の選択をする。
このため、副走査境界ラインであるか、否かをチェックし(ステップS1203)、副走査境界ラインである場合には(ステップS1203-YES)、上記複合データに対応した重み係数の選択動作を行う(ステップS1205)。即ち、重み係数選択部56は、副走査境界ラインに対し、検出面の反射係数と反射面同士の面倒れ角度の違い(図12(B)の面倒れ角度θ1とθ2)と、ドットを書込む主走査カウント値の複合データに応じて、当該画像に用いる重み係数を重み係数設定テーブル57からとりだし、現像剤消費量演算部58に設定する。ただ、重み係数設定テーブル57を参照するために用いる上記複合データ中のドットを書込む主走査カウント値は、エリア分割を導入しているので、重み係数の選択をする前に、エリア判定を行い(ステップS1204)、得たエリア判定データをステップS1205の参照に用いる複合データ中のドット書込み位置を表すデータとして用いる。
他方、副走査境界ラインではない場合には(ステップS1203-NO)、基準面倒れ角度及び複合された反射係数と、ドットの書込み位置に対応した重み係数の選択動作を行う(ステップS1207)。即ち、重み係数選択部56は、副走査境界ライン以外のラインに対し、複合される面倒れ角度を基準値とし、得た重み係数値を現像剤消費量演算部58に設定する。ただ、このときに、重み係数設定テーブル57を参照するために用いる上記複合データ中のドットを書込む主走査カウント値は、エリア分割を導入しているので、重み係数の選択をする前に、エリア判定を行い(ステップS1206)、得たエリア判定データをステップS1207の参照に用いる複合データ中のドット書込み位置を表すデータとして用いる。
次いで、現像剤消費量演算部58は、1面目の4画像データD1〜D4にそれぞれに対する現像剤の消費量を設定された重み係数を用いた演算によって算出する(ステップS1208)。
この現像剤消費量の演算は、ライン画像の書込みに用いるデータに対し、順次有効画像領域の最終ラインの画像まで、1反射面で同時に書込む4ラインごとに繰り返される。従って、処理フローとしては、有効領域内であることを確認し(ステップS1209)、この確認ができれば、再びステップS1202に戻して、現像剤消費量の演算を繰り返す。
ステップS1209で、有効領域内を外れたことが確認できれば、この処理フローを終了する。
本実施形態では、上記のように、回転多面鏡20の反射係数及び面倒れ角度が各反射面で異なり、さらに光ビームスポット径の主走査方向に生じる変動があり、且つ1反射面で同時に複数ビームの書込みを行う場合にも、重み係数を変更することにより現像剤消費量を正しい値に調整することが可能なる。しかも、処理対象のライン画像に対し、エリア分割方式を導入することによって、重み付け係数設定テーブルの規模を縮小することが可能になる。
次いで、現像剤消費量演算部58は、1面目の4画像データD1〜D4にそれぞれに対する現像剤の消費量を設定された重み係数を用いた演算によって算出する(ステップS1208)。
この現像剤消費量の演算は、ライン画像の書込みに用いるデータに対し、順次有効画像領域の最終ラインの画像まで、1反射面で同時に書込む4ラインごとに繰り返される。従って、処理フローとしては、有効領域内であることを確認し(ステップS1209)、この確認ができれば、再びステップS1202に戻して、現像剤消費量の演算を繰り返す。
ステップS1209で、有効領域内を外れたことが確認できれば、この処理フローを終了する。
本実施形態では、上記のように、回転多面鏡20の反射係数及び面倒れ角度が各反射面で異なり、さらに光ビームスポット径の主走査方向に生じる変動があり、且つ1反射面で同時に複数ビームの書込みを行う場合にも、重み係数を変更することにより現像剤消費量を正しい値に調整することが可能なる。しかも、処理対象のライン画像に対し、エリア分割方式を導入することによって、重み付け係数設定テーブルの規模を縮小することが可能になる。
10・・LD(レーザ ダイオード)光源、15・・LD駆動部、20・・回転多面鏡(ポリゴンミラー)、22・・回転多面鏡駆動部、30・・感光体ドラム、40・・同期検知センサ、50・・書込み制御部、51・・反射面位置検出部、52・・副走査カウント部、53・・副走査境界ライン検出部、54・・主走査カウント部、55・・エリア判定部、56・・重み係数選択部、57・・重み係数設定テーブル、58・・現像剤消費量演算部。
Claims (12)
- 点灯が制御可能であり、点灯時に光ビームを出力する発光源と、
前記発光源から出力される光ビームを回転多面鏡よりなる偏向器によって主走査方向に偏向し、周期走査させる主走査手段と、
前記主走査手段により周期走査される光ビームにより露光される感光体と、
前記感光体を該光ビームの主走査方向に交わる方向に変位させる副走査手段と、
前記主走査手段及び副走査手段の動作とタイミングをとって、前記発光源を画像データにより点灯制御し、出力する光ビームで前記感光体を露光し、感光体に潜像を形成する画像露光手段と、
前記画像露光手段により前記感光体に形成された潜像に現像剤を付着させ、可視像を生成する現像手段を有する画像形成装置であって、
点灯制御に用いる画像データに対応した値を持つドットの配列で表される点灯制御用の走査ラインデータと、該走査ラインデータにおける注目ドットと近接ドットの位置関係の違いに対応して設定される現像剤消費量算出用の重み係数とに基づいて、現像剤の消費量を算出する消費量算出手段と、
前記感光体の走査露光に用いる前記主走査手段の特性を表す情報を取得する特性情報取得手段と、
前記特性情報取得手段によって取得した主走査手段の特性に応じて、前記消費量算出手段に用いる重み係数を設定する重み係数設定手段を備えたことを特徴とする画像形成装置。 - 請求項1に記載された画像形成装置において、
前記特性情報取得手段が、光ビームを周期走査させる際、各周期走査に用いる回転多面鏡の反射面を特定し、特定された反射面それぞれに対応する反射係数を取得する手段であり、
前記重み係数設定手段は、反射係数に対応して予め用意された重み係数から、該当する反射係数に応じた重み係数を設定する手段であることを特徴とする画像形成装置。 - 請求項1に記載された画像形成装置において、
前記特性情報取得手段が、光ビームを周期走査させる際、各周期走査に用いる回転多面鏡の反射面を特定し、特定された反射面それぞれに対応する面倒れ角度を取得する手段であり、
前記重み係数設定手段は、面倒れ角度に対応して予め用意された重み係数から、該当する面倒れ角度に応じた重み係数を設定する手段であることを特徴とする画像形成装置。 - 請求項1に記載された画像形成装置において、
前記特性情報取得手段が、光ビームを周期走査させる際、各周期走査に用いる回転多面鏡の反射面を特定し、特定された反射面それぞれに対応する反射係数及び面倒れ角度を取得する手段であり、
前記重み係数設定手段は、反射係数及び面倒れ角度に対応して予め用意された重み係数から、該当する反射係数及び面倒れ角度に応じた重み係数を設定する手段であることを特徴とする画像形成装置。 - 請求項1に記載された画像形成装置において、
前記特性情報取得手段が、光ビームの各周期走査において、感光体を露光する光ビームのスポット径の主走査方向に生じる変動を取得する手段であり、
前記重み係数設定手段は、光ビームのスポット径の主走査方向に生じる変動に対応して予め用意された重み係数から、該当する変動に応じた重み係数を設定する手段であることを特徴とする画像形成装置。 - 請求項1に記載された画像形成装置において、
前記特性情報取得手段が、光ビームを周期走査させる際、各周期走査に用いる回転多面鏡の反射面を特定し、特定された反射面それぞれに対応する反射係数及び面倒れ角度を取得すると同時に、光ビームの各周期走査において、感光体を露光する光ビームのスポット径の主走査方向に生じる変動を取得する手段であり、
前記重み係数設定手段は、反射係数、面倒れ角度及び光ビームのスポット径の主走査方向に生じる変動、に対応して予め用意された重み係数から、該当する、反射係数、面倒れ角度及び光ビームのスポット径の主走査方向に生じる変動、に応じた重み係数を設定する手段であることを特徴とする画像形成装置。 - 請求項5又は6に記載された画像形成装置において、
前記特性情報取得手段により取得されるスポット径の主走査方向に生じる変動が、主走査方向をエリア分割し、分割したエリアごとに1つの値を対応させる方式により、与えられることを特徴とする画像形成装置。 - コンピュータを請求項1乃至7のいずれかに記載された画像形成装置における前記消費量算出手段、前記特性情報取得手段及び前記重み係数設定手段として機能させるためのプログラム。
- 発光源から出力される光ビームを回転多面鏡よりなる偏向器を用いた主走査手段によって主走査方向に偏向し、周期走査させる主走査工程、
感光体を光ビームの主走査方向に交わる方向に変位させる副走査工程、
主走査及び副走査とタイミングをとって、発光源を画像データにより点灯制御し、出力する光ビームで感光体を露光し、感光体に潜像を形成する画像露光工程、
感光体に形成された潜像に現像剤を付着させ、可視像を生成する現像工程、
の各工程よりなる画像形成工程によって、消費される現像剤を算出する現像剤の消費量算出方法であって、
点灯制御に用いる画像データに対応した値を持つドットの配列で表される点灯制御用の走査ラインデータと、該走査ラインデータにおける注目ドットと近接ドットの位置関係の違いに対応して設定される現像剤消費量算出用の重み係数とに基づいて、現像剤の消費量を算出する消費量算出工程と、
前記感光体の走査露光に用いる前記偏向手段の特性を表す情報を取得する特性情報取得工程と、
前記特性情報取得工程によって取得した偏向手段の特性に応じて、前記消費量算出工程に用いる重み係数を設定する重み係数設定工程と、
を行うことを特徴とする消費量算出方法。 - 請求項9に記載された消費量算出方法において、
前記特性情報取得工程が、光ビームを周期走査させる際、各周期走査に用いる回転多面鏡の反射面を特定し、特定された反射面それぞれに対応する反射係数を取得する工程であり、
前記重み係数設定工程手段は、反射係数に対応して予め用意された重み係数から、該当する反射係数に応じた重み係数を設定する工程であることを特徴とする消費量算出方法。 - 請求項9に記載された消費量算出方法において、
前記特性情報取得工程が、光ビームを周期走査させる際、各周期走査に用いる回転多面鏡の反射面を特定し、特定された反射面それぞれに対応する面倒れ角度を取得する工程であり、
前記重み係数設定工程手段は、面倒れ角度に対応して予め用意された重み係数から、該当する面倒れ角度に応じた重み係数を設定する工程であることを特徴とする消費量算出方法。 - 請求項9に記載された消費量算出方法において、
前記特性情報取得工程が、光ビームの各周期走査において、感光体を露光する光ビームのスポット径の主走査方向に生じる変動を取得する工程であり、
前記重み係数設定工程手段は、光ビームのスポット径の主走査方向に生じる変動に対応して予め用意された重み係数から、該当する変動に応じた重み係数を設定する工程であることを特徴とする消費量算出方法。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2006117978A JP2007292856A (ja) | 2006-04-21 | 2006-04-21 | 画像形成装置、現像剤の消費量算出方法及びプログラム |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2006117978A JP2007292856A (ja) | 2006-04-21 | 2006-04-21 | 画像形成装置、現像剤の消費量算出方法及びプログラム |
Publications (1)
| Publication Number | Publication Date |
|---|---|
| JP2007292856A true JP2007292856A (ja) | 2007-11-08 |
Family
ID=38763564
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2006117978A Pending JP2007292856A (ja) | 2006-04-21 | 2006-04-21 | 画像形成装置、現像剤の消費量算出方法及びプログラム |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP2007292856A (ja) |
Cited By (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| DE102008056905A1 (de) | 2007-11-12 | 2009-05-20 | Denso Corp., Kariya-shi | Radarvorrichtung; Die ein vereinfachtes unterdrücken von Interferenzsignalkomponenten zulässt, welche sich aus einem empfangen von direkt gesendeten Radarwellen von einer anderen Radarvorrichtung ergeben |
| JP2015179150A (ja) * | 2014-03-19 | 2015-10-08 | キヤノン株式会社 | 画像形成装置 |
-
2006
- 2006-04-21 JP JP2006117978A patent/JP2007292856A/ja active Pending
Cited By (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| DE102008056905A1 (de) | 2007-11-12 | 2009-05-20 | Denso Corp., Kariya-shi | Radarvorrichtung; Die ein vereinfachtes unterdrücken von Interferenzsignalkomponenten zulässt, welche sich aus einem empfangen von direkt gesendeten Radarwellen von einer anderen Radarvorrichtung ergeben |
| JP2015179150A (ja) * | 2014-03-19 | 2015-10-08 | キヤノン株式会社 | 画像形成装置 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| KR100846379B1 (ko) | 화상 형성 장치 및 방법 | |
| KR101646821B1 (ko) | 레이저 빔 간의 상대 위치를 보정할 수 있는 화상 형성 장치 | |
| JP4868923B2 (ja) | 光走査装置および画像形成装置 | |
| JP6401496B2 (ja) | 画像形成装置 | |
| JP5103349B2 (ja) | 画像形成装置 | |
| EP2040129A2 (en) | Method and apparatus for forming image, and computer program product | |
| JP2007292856A (ja) | 画像形成装置、現像剤の消費量算出方法及びプログラム | |
| JP2013223955A (ja) | 画像形成装置、テスト画像形成方法 | |
| US8125504B2 (en) | Image forming apparatus and control program of image forming apparatus | |
| JP2013163308A (ja) | 画像形成装置及び画像形成方法 | |
| JP5188113B2 (ja) | 画像形成装置及びその制御方法 | |
| US9025197B2 (en) | Optical scanning device in image forming apparatus, and control method thereof | |
| JP2000238329A (ja) | 画像形成装置 | |
| JP2023048679A (ja) | 画像形成装置 | |
| US6757075B1 (en) | Image forming device and recording medium storing program | |
| JP2013222037A (ja) | 画像形成装置及びテスト画像形成方法 | |
| JP2006150772A (ja) | 画像形成装置 | |
| JP6260200B2 (ja) | 画像形成装置及び画像ずれ補正方法 | |
| JP5740818B2 (ja) | 画像形成装置 | |
| JP2010214612A (ja) | 画像形成装置、割当ライン決定方法及びプログラム | |
| JP2010210753A (ja) | 画像形成装置、画像形成方法 | |
| JP2004276582A (ja) | 露光量調整方法、露光量調整装置、画像形成装置、コンピュータプログラム及び記録媒体 | |
| JP2002283616A (ja) | 画像形成装置と画像形成装置のレーザダイオード制御方法 | |
| JP2006103130A (ja) | マルチビーム画像形成装置 | |
| JP5483896B2 (ja) | 光走査装置及びその制御方法 |