JP2007155356A - 測距装置および測距方法 - Google Patents
測距装置および測距方法 Download PDFInfo
- Publication number
- JP2007155356A JP2007155356A JP2005346956A JP2005346956A JP2007155356A JP 2007155356 A JP2007155356 A JP 2007155356A JP 2005346956 A JP2005346956 A JP 2005346956A JP 2005346956 A JP2005346956 A JP 2005346956A JP 2007155356 A JP2007155356 A JP 2007155356A
- Authority
- JP
- Japan
- Prior art keywords
- distance
- variation
- calculated
- calculating
- average
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Pending
Links
Images


Landscapes
- Measurement Of Optical Distance (AREA)
- Projection Apparatus (AREA)
- Optical Radar Systems And Details Thereof (AREA)
Abstract
【課題】 複数回測距してみた個々の測距データのバラツキが小さい場合、測距回数を減らすことで測距時間を短縮し、逆に測距データのバラツキが大きい場合、測距回数をより多くすることで測距精度を向上させる。
【解決手段】 ステップS201〜S204により、投射レンズからスクリーン迄の距離に応じた値をM回算出する。ステップS205M回算出した距離に応じた値のバラつきを標準偏差を使って算出する。このバラつきが所定の範囲に収まっていればM回測定した平均値の値は正しいとし、これを最終的にピンと調整のための測距データとする。もし、所定の範囲に収まっていなければ、ステップS207以降で投射レンズからスクリーン迄の距離に応じた値をN回測定し、この(M+N)回測距した平均値を最終的にピンと調整のための測距データとする。
【選択図】 図2
【解決手段】 ステップS201〜S204により、投射レンズからスクリーン迄の距離に応じた値をM回算出する。ステップS205M回算出した距離に応じた値のバラつきを標準偏差を使って算出する。このバラつきが所定の範囲に収まっていればM回測定した平均値の値は正しいとし、これを最終的にピンと調整のための測距データとする。もし、所定の範囲に収まっていなければ、ステップS207以降で投射レンズからスクリーン迄の距離に応じた値をN回測定し、この(M+N)回測距した平均値を最終的にピンと調整のための測距データとする。
【選択図】 図2
Description
この発明は、距離を測定する測距装置および測距方法に関する。
従来の測距装置は、複数回測距した結果に基づき最終的な測距結果を出力する測距装置が知られている。例えば、要求されるS/N比と測距時間に従って測距回数を選択するものが知られている(例えば、特許文献1参照)。
また、1回目の受光強度で測距回数を設定するものもある(例えば、特許文献2参照)。
特開平09−126755号公報
特開2001−59934公報
このように従来の測距装置においては、測距データのバラツキに基づいて、複数回測距するときの測距回数が決定されていないという問題があった。
この発明は、測距データのバラツキに基づいて、複数回測距するときの測距回数が決定することにより、複数回測距してみた個々の測距データのバラツキが小さい場合、測距回数を減らすことで測距時間を短縮することができる。逆に測距データのバラツキが大きい場合、測距回数をより多くすることで測距精度を向上させた測距装置を提供することを目的とする。
この発明は、測距データのバラツキに基づいて、複数回測距するときの測距回数が決定することにより、複数回測距してみた個々の測距データのバラツキが小さい場合、測距回数を減らすことで測距時間を短縮することができる。逆に測距データのバラツキが大きい場合、測距回数をより多くすることで測距精度を向上させた測距装置を提供することを目的とする。
上記の目的を達成するために、この発明においては、投射レンズからスクリーン迄の距離に応じた値を複数回算出し、距離をピント調整に用いるための距離として出力する測距装置において、投射レンズからスクリーン迄の距離に応じた値をM(Mは2以上の整数)回算出する第1の算出手段と、前記M回算出した距離に応じた値のバラつきを算出する第1のバラつき算出手段と、前記M回算出した距離の平均を算出する第1の平均距離算出手段と、前記バラつきが所定の範囲に収まっているとき、前記第1の平均距離算出手段により算出された距離をピント調整に用いるための距離として出力する手段と、前記バラつきが所定の範囲に収まっていないとき、投射レンズからスクリーン迄の距離に応じた値をN(Nは2以上の整数)回算出する第2の算出手段と、前記(M+N)回算出した距離に応じた値のバラつきを算出する第2のバラつき算出手段と、前記(M+N)回算出した距離の平均を算出する第2の平均距離算出手段と、前記第2の平均距離算出手段により算出された距離をピント調整に用いるための距離として出力する第2の出力手段とを備えたことを特徴とする測距装置を提供する。
なお、装置に係る本発明は方法に係る発明としても成立し、方法に係る本発明は装置に係る発明としても成立する。
この発明によれば、複数回測距してみた個々の測距データのバラツキが小さい場合、測距回数を減らすことで測距時間を短縮することができる。逆に測距データのバラツキが大きい場合、測距回数をより多くすることで測距精度を向上させることができる。
以下、図面を参照しながら本発明の実施の形態について説明する。
この実施形態では測距装置として、投射レンズからスクリーン迄の距離を測距するプロジェクタを例に説明する。
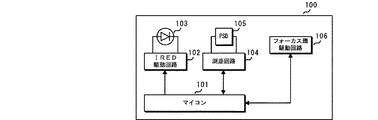
図1は、本発明におけるオートフォーカス(AF)機能を有したプロジェクタの基本構成である。
図1において、プロジェクタ100はマイコン101、赤外光を照射する発光部であるIRED103、マイコン101からの制御に従ってIRED103を駆動するIRED駆動回路102、スクリーンから反射した赤外光を受光する受光部であるPSD(Position Sensitive Detector)105、PSD105の両端から出力された電流値の比から、投射レンズからスクリーンまでの距離に応じたデジタルデータ(以後AFデータと呼ぶ)を算出し、この算出したAFデータをマイコン101からの指示に従ってマイコン101へ出力する測距回路104、マイコン101からの指示に従ってフォーカス環を駆動しピント調整する駆動回路106、から構成される。
この実施形態では測距装置として、投射レンズからスクリーン迄の距離を測距するプロジェクタを例に説明する。
図1は、本発明におけるオートフォーカス(AF)機能を有したプロジェクタの基本構成である。
図1において、プロジェクタ100はマイコン101、赤外光を照射する発光部であるIRED103、マイコン101からの制御に従ってIRED103を駆動するIRED駆動回路102、スクリーンから反射した赤外光を受光する受光部であるPSD(Position Sensitive Detector)105、PSD105の両端から出力された電流値の比から、投射レンズからスクリーンまでの距離に応じたデジタルデータ(以後AFデータと呼ぶ)を算出し、この算出したAFデータをマイコン101からの指示に従ってマイコン101へ出力する測距回路104、マイコン101からの指示に従ってフォーカス環を駆動しピント調整する駆動回路106、から構成される。
次に、図2を用いて、オートフォーカス実行時の動作フローを説明する。
(ステップS201)
まず、マイコン101はIRED駆動回路102を制御して、IRED103から赤外光をスクリーンへ照射させる。
すると、図示しない受光レンズは、前記赤外光がスクリーンから反射された反射光をPSD105上に結像させる。
PSD105はPINフォトダイオードで構成された半導体素子であり、入射光の光電流をその入射位置に対応する比で分割し、PSD105の両端子から出力するよう構成されている。
(ステップS201)
まず、マイコン101はIRED駆動回路102を制御して、IRED103から赤外光をスクリーンへ照射させる。
すると、図示しない受光レンズは、前記赤外光がスクリーンから反射された反射光をPSD105上に結像させる。
PSD105はPINフォトダイオードで構成された半導体素子であり、入射光の光電流をその入射位置に対応する比で分割し、PSD105の両端子から出力するよう構成されている。
(ステップS202)
次に、マイコン101は測距回路104を制御して、測距回路104にAFデータを算出させる。測距回路104は、PSD105の両端から出力された電流値の比から、投射レンズからスクリーンまでの距離に応じたAFデータを算出する。
次に、マイコン101は測距回路104を制御して、測距回路104にAFデータを算出させる。測距回路104は、PSD105の両端から出力された電流値の比から、投射レンズからスクリーンまでの距離に応じたAFデータを算出する。
(ステップS203)
マイコン101は、測距回路104から取得したAFデータをマイコン101内のバッファやマイコン101にアクセス可能なRAM上にセーブする。
(ステップS204)
マイコン101は測距回数が予め指定された回数(M回)に達したかどうか確認する。M回に達していなければステップS201へ戻り、測距を繰り返す。ここでM回に達していたら、次のステップS205へ進む。
マイコン101は、測距回路104から取得したAFデータをマイコン101内のバッファやマイコン101にアクセス可能なRAM上にセーブする。
(ステップS204)
マイコン101は測距回数が予め指定された回数(M回)に達したかどうか確認する。M回に達していなければステップS201へ戻り、測距を繰り返す。ここでM回に達していたら、次のステップS205へ進む。
(ステップS205)
マイコン101は、M回蓄積したAFデータから、平均値(y1)と標準偏差(σ1)を算出する。さらに、上記平均値y1から距離Lを算出する。尚、AFデータYと距離Lには次の(式1)の関係が成立する。
マイコン101は、M回蓄積したAFデータから、平均値(y1)と標準偏差(σ1)を算出する。さらに、上記平均値y1から距離Lを算出する。尚、AFデータYと距離Lには次の(式1)の関係が成立する。
Y=a/L+b ・・・(1)
なお、(式1)のaとbはセンサ毎に決まる定数なので、センサ毎にキャリブレーションして求めておく必要がある。
(ステップS206)
マイコン101は、ステップS205で算出した標準偏差(σ1)と、予め設定しておいたバラツキ基準値(σstd)とを比較する。
この比較の結果σ1の方が小さければ、マイコン101はAFデータのバラツキが基準以下と判断し、ここでAFデータの取得を中止し、ステップS205で算出した距離Lを最終的な距離LとしてステップS212へ進む。
なお、(式1)のaとbはセンサ毎に決まる定数なので、センサ毎にキャリブレーションして求めておく必要がある。
(ステップS206)
マイコン101は、ステップS205で算出した標準偏差(σ1)と、予め設定しておいたバラツキ基準値(σstd)とを比較する。
この比較の結果σ1の方が小さければ、マイコン101はAFデータのバラツキが基準以下と判断し、ここでAFデータの取得を中止し、ステップS205で算出した距離Lを最終的な距離LとしてステップS212へ進む。
また反対に比較の結果σ1の方が小さくなければ、ステップS207〜S210を実行し、更にN回AFデータを取得し、マイコン101のRAMに結果を蓄積しておく。なお、このステップS207〜S210は、ステップS201〜S204に対応し、AFデータをM回でなく新たにN回取得するだけであるため説明は省略する。
(ステップS211)
マイコン101は、(M+N)回のAFデータの取得が終了したら、(M+N)回のAFデータの平均値(y2)を算出すると共に、上記(式1)を使って最終的な距離Lを算出し、ステップS212へ進む。
マイコン101は、(M+N)回のAFデータの取得が終了したら、(M+N)回のAFデータの平均値(y2)を算出すると共に、上記(式1)を使って最終的な距離Lを算出し、ステップS212へ進む。
(ステップS212)
マイコン101は、求めた最終的な距離Lから適正なフォーカス量を算出し、フォーカス環駆動回路106を駆動しピント調整する。
なお、図2のフローでは、測距回数は2段階(1回目はM回、2回目はN回測距)に分けた。しかし本発明は2段階に限定せず3段階以上に分けてもよい。図3は、3段階に分けたときのフローを示す図である。図3の例ではマイコン101は、3段目として更にP回のAFデータを得て、ステップS217にて(M+N+P)回のAFデータの平均値(y3)を求め、この求めたy3から最終的にフォーカスを合わせるのに用いる距離Lを算出している。
マイコン101は、求めた最終的な距離Lから適正なフォーカス量を算出し、フォーカス環駆動回路106を駆動しピント調整する。
なお、図2のフローでは、測距回数は2段階(1回目はM回、2回目はN回測距)に分けた。しかし本発明は2段階に限定せず3段階以上に分けてもよい。図3は、3段階に分けたときのフローを示す図である。図3の例ではマイコン101は、3段目として更にP回のAFデータを得て、ステップS217にて(M+N+P)回のAFデータの平均値(y3)を求め、この求めたy3から最終的にフォーカスを合わせるのに用いる距離Lを算出している。
また、このとき3回以上に分ける場合、測距を継続するか否かを判断する基準値(図2のσstd)を一定のままにしてもよいし、段階に応じて可変(段々基準を甘くする等)にしてもよい。
以上説明した通り、この発明によれば、複数回測距してみた個々の測距データのバラツキが小さい場合、測距回数を減らすことで測距時間を短縮することができる。逆に測距データのバラツキが大きい場合、測距回数をより多くすることで測距精度を向上させることができる。
なお、本発明は上記実施形態そのままに限定されるものではなく、実施段階ではその要旨を逸脱しない範囲で構成要素を変形して具体化できる。また、上記実施形態に開示されている複数の構成要素の適宜な組み合わせにより、種々の発明を形成できる。例えば、実施形態に示される全構成要素から幾つかの構成要素を削除してもよい。
100…プロジェクタ、101…マイコン、102…IRED駆動回路、103…IRED、104…測距回路、105…PSD(Position Senstive Detector)、106…フォーカス環駆動回路。
Claims (4)
- 投射レンズからスクリーン迄の距離に応じた値を複数回算出し、距離をピント調整に用いるための距離として出力する測距装置において、
投射レンズからスクリーン迄の距離に応じた値をM(Mは2以上の整数)回算出する第1の算出手段と、
前記M回算出した距離に応じた値のバラつきを算出する第1のバラつき算出手段と、
前記M回算出した距離の平均を算出する第1の平均距離算出手段と、
前記バラつきが所定の範囲に収まっているとき、前記第1の平均距離算出手段により算出された距離をピント調整に用いるための距離として出力する手段と、
前記バラつきが所定の範囲に収まっていないとき、
投射レンズからスクリーン迄の距離に応じた値をN(Nは2以上の整数)回算出する第2の算出手段と、
前記(M+N)回算出した距離に応じた値のバラつきを算出する第2のバラつき算出手段と、
前記(M+N)回算出した距離の平均を算出する第2の平均距離算出手段と、
前記第2の平均距離算出手段により算出された距離をピント調整に用いるための距離として出力する第2の出力手段とを備えたことを特徴とする測距装置。 - 前記バラつき算出手段は、回算出した距離に応じた値の標準偏差を用いて、前記バラつきを算出することを特徴とする請求項1記載の測距装置。
- 投射レンズからスクリーン迄の距離に応じた値を複数回算出し、距離をピント調整に用いるための距離として出力する測距装置において、
投射レンズからスクリーン迄の距離に応じた値をM(Mは2以上の整数)回算出する第1の算出手段と、
前記M回算出した距離に応じた値のバラつきを算出する第1のバラつき算出手段と、
前記M回算出した距離の平均を算出する第1の平均距離算出手段と、
前記バラつきが所定の範囲に収まっているとき、前記第1の平均距離算出手段により算出された距離をピント調整に用いるための距離として出力する手段と、
前記バラつきが所定の範囲に収まっていないとき、
投射レンズからスクリーン迄の距離に応じた値をN(Nは2以上の整数)回算出する第2の算出手段と、
前記(M+N)回算出した距離に応じた値のバラつきを算出する第2のバラつき算出手段と、
前記(M+N)回算出した距離の平均を算出する第2の平均距離算出手段と、
前記第2の平均距離算出手段により算出された距離をピント調整に用いるための距離として出力する第2の出力手段とを備えたことを特徴とする測距装置。
前記バラつきが前記所定の範囲よりも緩い範囲に収まっているとき、前記第1の平均距離算出手段により算出された距離をピント調整に用いるための距離として出力する手段とを備えたことを特徴とする測距装置。 - 投射レンズからスクリーン迄の距離に応じた値を複数回算出し、距離をピント調整に用いるための距離として出力する測距方法において、
第1の算出手段により、投射レンズからスクリーン迄の距離に応じた値をM(Mは2以上の整数)回算出し、
第1のバラつき算出手段により、前記M回算出した距離に応じた値のバラつきを算出し、
第1の平均距離算出手段により、前記M回算出した距離の平均を算出し、
前記バラつきが所定の範囲に収まっているとき、前記第1の平均距離算出手段により算出された距離をピント調整に用いるための距離として出力し、
前記バラつきが所定の範囲に収まっていないとき、
第2の算出手段により、投射レンズからスクリーン迄の距離に応じた値をN(Nは2以上の整数)回算出し、
第2のバラつき算出手段により、前記(M+N)回算出した距離に応じた値のバラつきを算出し、
第2の平均距離算出手段により、前記(M+N)回算出した距離の平均を算出し、
第2の出力手段により、前記第2の平均距離算出手段により算出された距離をピント調整に用いるための距離として出力することを特徴とする測距方法。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2005346956A JP2007155356A (ja) | 2005-11-30 | 2005-11-30 | 測距装置および測距方法 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2005346956A JP2007155356A (ja) | 2005-11-30 | 2005-11-30 | 測距装置および測距方法 |
Publications (1)
| Publication Number | Publication Date |
|---|---|
| JP2007155356A true JP2007155356A (ja) | 2007-06-21 |
Family
ID=38239945
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2005346956A Pending JP2007155356A (ja) | 2005-11-30 | 2005-11-30 | 測距装置および測距方法 |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP2007155356A (ja) |
Cited By (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2010091377A (ja) * | 2008-10-07 | 2010-04-22 | Toyota Motor Corp | 光学式測距装置及び方法 |
| WO2012014521A1 (ja) * | 2010-07-30 | 2012-02-02 | オムロン株式会社 | 変位センサ |
| JP2013206906A (ja) * | 2012-03-27 | 2013-10-07 | Sony Corp | 認識装置、認識方法、プログラム及び基板の製造方法 |
| JP2021518308A (ja) * | 2018-03-21 | 2021-08-02 | ズークス インコーポレイテッド | センサーの誤較正の自動検出 |
| WO2021182405A1 (ja) * | 2020-03-12 | 2021-09-16 | ファナック株式会社 | 撮像回数を調整する距離画像撮像システム |
-
2005
- 2005-11-30 JP JP2005346956A patent/JP2007155356A/ja active Pending
Cited By (12)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2010091377A (ja) * | 2008-10-07 | 2010-04-22 | Toyota Motor Corp | 光学式測距装置及び方法 |
| WO2012014521A1 (ja) * | 2010-07-30 | 2012-02-02 | オムロン株式会社 | 変位センサ |
| JP2012032305A (ja) * | 2010-07-30 | 2012-02-16 | Omron Corp | 変位センサ |
| CN102713510A (zh) * | 2010-07-30 | 2012-10-03 | 欧姆龙株式会社 | 位移传感器 |
| KR101426630B1 (ko) | 2010-07-30 | 2014-08-05 | 오므론 가부시키가이샤 | 변위 센서 |
| US8805643B2 (en) | 2010-07-30 | 2014-08-12 | Omron Corporation | Displacement sensor |
| JP2013206906A (ja) * | 2012-03-27 | 2013-10-07 | Sony Corp | 認識装置、認識方法、プログラム及び基板の製造方法 |
| JP2021518308A (ja) * | 2018-03-21 | 2021-08-02 | ズークス インコーポレイテッド | センサーの誤較正の自動検出 |
| JP7488765B2 (ja) | 2018-03-21 | 2024-05-22 | ズークス インコーポレイテッド | センサーの誤較正の自動検出 |
| WO2021182405A1 (ja) * | 2020-03-12 | 2021-09-16 | ファナック株式会社 | 撮像回数を調整する距離画像撮像システム |
| JPWO2021182405A1 (ja) * | 2020-03-12 | 2021-09-16 | ||
| JP7410271B2 (ja) | 2020-03-12 | 2024-01-09 | ファナック株式会社 | 撮像回数を調整する距離画像撮像システム |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP2011064498A (ja) | 測距装置、測距方法、及びそのプログラム | |
| WO2015128915A1 (ja) | 測距装置及び測距方法 | |
| JP2007155356A (ja) | 測距装置および測距方法 | |
| JP2020046637A (ja) | 制御装置、撮像装置、制御方法、および、プログラム | |
| KR20160092137A (ko) | 티오에프 방식의 거리 측정 장치에서 제어 방법 | |
| US10339665B2 (en) | Positional shift amount calculation apparatus and imaging apparatus | |
| JP5794665B2 (ja) | 撮像装置 | |
| JP2009157062A (ja) | オートフォーカス装置、オートフォーカス方法及びプログラム | |
| US6944397B2 (en) | Distance measuring device | |
| JP2017011351A (ja) | 撮像装置、その制御方法、および制御プログラム | |
| JP2638607B2 (ja) | 測距装置 | |
| WO2024101195A1 (ja) | 3次元形状計測装置および3次元形状計測方法 | |
| JP2006243189A (ja) | カメラ | |
| JP3694018B2 (ja) | 測距装置 | |
| JP2024070647A (ja) | 3次元形状計測装置および3次元形状計測方法 | |
| JP2004125651A (ja) | 光学式測距装置 | |
| JP3479597B2 (ja) | 測距装置 | |
| JP2004294325A (ja) | 測距装置 | |
| JP2004294881A (ja) | カメラ | |
| JP3447509B2 (ja) | 測距装置 | |
| JP2006105604A (ja) | 測距装置 | |
| JP3479595B2 (ja) | 測距装置 | |
| JP3479596B2 (ja) | 測距装置 | |
| JP3762589B2 (ja) | 測距装置 | |
| JP2003262903A (ja) | カメラ |