JP2007010461A - 回転数検出装置および絶対値エンコーダ付きモータ並びに回転駆動装置 - Google Patents
回転数検出装置および絶対値エンコーダ付きモータ並びに回転駆動装置 Download PDFInfo
- Publication number
- JP2007010461A JP2007010461A JP2005191140A JP2005191140A JP2007010461A JP 2007010461 A JP2007010461 A JP 2007010461A JP 2005191140 A JP2005191140 A JP 2005191140A JP 2005191140 A JP2005191140 A JP 2005191140A JP 2007010461 A JP2007010461 A JP 2007010461A
- Authority
- JP
- Japan
- Prior art keywords
- rotation
- count value
- signal
- encoder
- counter
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Pending
Links
Images



Abstract
【課題】
計数値の上限を、簡単な構成と操作で任意の上限に変える。
【解決手段】
N進のシングルカウンタとM進の多回転カウンタからなる絶対値エンコーダ2を備えたモータ1がギアで減速してテーブル6を駆動する回転駆動装置において、絶対値エンコーダ2の検出信号を受けるとサンプリング信号SPと検出信号Sを出力するエンコーダI/Fと、サンプリング信号SPに合せて検出信号Sを記憶して検出信号に含まれるシングルカウント値をテーブル6の回転位置の下位データPLとして出力すると共に記憶した検出信号Sに含まれる多回転カウント値aと1サンプリング前の多回転カウント値bを出力する受信バッファ13と、受信バッファ13の2つの多回転カウント値a、bからテーブルbの回転位置の上位データPUを求める回転数演算部12とからなる。
【選択図】図3
計数値の上限を、簡単な構成と操作で任意の上限に変える。
【解決手段】
N進のシングルカウンタとM進の多回転カウンタからなる絶対値エンコーダ2を備えたモータ1がギアで減速してテーブル6を駆動する回転駆動装置において、絶対値エンコーダ2の検出信号を受けるとサンプリング信号SPと検出信号Sを出力するエンコーダI/Fと、サンプリング信号SPに合せて検出信号Sを記憶して検出信号に含まれるシングルカウント値をテーブル6の回転位置の下位データPLとして出力すると共に記憶した検出信号Sに含まれる多回転カウント値aと1サンプリング前の多回転カウント値bを出力する受信バッファ13と、受信バッファ13の2つの多回転カウント値a、bからテーブルbの回転位置の上位データPUを求める回転数演算部12とからなる。
【選択図】図3
Description
本発明は、エンドレスで動作するマシンの回転位置を検出する回転数検出装置に関する。
回転軸がある回転量を超えると元の状態にもどるような動作をするマシンでは、回転量の上限を設定したとき、その上限を超えて回転軸が回転して同じ状態になったときに同じ回転量として認識できると便利である。例えば、モータシャフトをギアダウンしてモータN回転でテーブルを1回転させるようなマシンでは、回転量がN−1を超えると0からカウントアップして逆に0を下回るとN−1からカウントダウンするようにし、モータがN回転を超えて回転してもモータの回転量が0〜N−1回転の値をとるように管理することができ、回転量がテーブルの位置を示すことができる。
ところで、モータに取り付けられた回転位置検出器が、シングルカウンタと多回転カウンタを持つ絶対値エンコーダであった場合、その多回転カウンタにはエンコーダの構成に制約された上限値が存在する。一般に検出器自体の多回転カウンタの上限値と、前記のようなマシンの多回転量の上限値とは異なるため、回転数検出装置ではこの違いを吸収しなければならない。
ところで、モータに取り付けられた回転位置検出器が、シングルカウンタと多回転カウンタを持つ絶対値エンコーダであった場合、その多回転カウンタにはエンコーダの構成に制約された上限値が存在する。一般に検出器自体の多回転カウンタの上限値と、前記のようなマシンの多回転量の上限値とは異なるため、回転数検出装置ではこの違いを吸収しなければならない。
従来技術として例えば特許文献1では、多回転カウンタのカウント値が上限を超えるか下限を下回ったことを判別して補正用のカウント値を加減算し、回転数演算処理をしても端数がでないことが示されている。
また特許文献2では、インクリメントエンコーダを使って、多回転カウンタのカウント値とシングルカウンタのカウント値からマシンの位置を算出することが示されている。
特許文献3では、送り動作の前後で多回転カウンタがオーバーフローするかどうかを判定し、オーバーフローするときは多回転カウンタのカウント値をあらかじめオーバーフロー後に書き換える動作をすることが示されている。
このように、従来の回転数検出装置は、あらかじめ補正処理用の係数を演算しておいたり、オーバーフローまたはアンダーフローしたことを検出してそのときに特別の処理を行う必要があった。
特開2004−279188号公報(P8、図4)
特許第3329142号(P7、図4)
特許第3037770号(P6、図3、P7、図4)
また特許文献2では、インクリメントエンコーダを使って、多回転カウンタのカウント値とシングルカウンタのカウント値からマシンの位置を算出することが示されている。
特許文献3では、送り動作の前後で多回転カウンタがオーバーフローするかどうかを判定し、オーバーフローするときは多回転カウンタのカウント値をあらかじめオーバーフロー後に書き換える動作をすることが示されている。
このように、従来の回転数検出装置は、あらかじめ補正処理用の係数を演算しておいたり、オーバーフローまたはアンダーフローしたことを検出してそのときに特別の処理を行う必要があった。
ところが従来のエンドレス処理装置は、上記のように定期的に回転量をチェックして上限を超えたか下限を下回った場合にのみ特別な処理を行うため、処理の乱れが起こるという問題があった。本発明はこのような問題点を解決し、単純な構成と手順でエンドレス処理を行うことができるエンドレス処理装置を提供することを目的とする。
上記問題を解決するため、第1の本発明は、N進のシングルカウンタとM進の多回転カウンタからなる絶対値エンコーダを備えたモータがギアで減速してテーブルを駆動する駆動系において、前記絶対値エンコーダの検出信号を受けるとサンプリング信号と前記検出信号を出力するエンコーダI/Fと、前記サンプリング信号に合せて前記検出信号を記憶し記憶した前記検出信号に含まれるシングルカウント値を前記テーブルの回転位置の下位データとして出力すると共に記憶した前記検出信号に含まれる多回転カウント値と1サンプリング前の多回転カウント値を出力する受信バッファと、前記受信バッファの2つの前記多回転カウント値から前記テーブルの回転位置の上位データを求めるエンドレス処理部とからなることを特徴としている。
第2の発明は、前記受信バッファは、前記サンプリング信号に合せて前記絶対値エンコーダの検出信号をシングルカウント値とN進の多回転カウント値とに分けて記憶する第1のメモリと、前記サンプリング信号に合せてそれまで前記第1のメモリに記憶された前記N進の多回転カウント値を記憶する第2のメモリを備えていることを特徴としている。
第3の発明は、前記エンドレス処理部は、前記受信バッファの2つの多回転カウント値を用いてa<N/4且つb>3N/4であればオーバーフロー信号OFをONしa>3N/4且つb<N/4であればアンダーフロー信号UFをONするという処理をしてオーバーフロー信号OFとアンダーフロー信号UFを出力する比較器と、前記オーバーフロー信号OFによってカウントアップし前記アンダーフロー信号UFによってカウントダウンしてカウント値を出力するM進のカウンタと、前記受信バッファの前記多回転カウント値と前記カウンタのカウント値を入力し{(計数値)×N+(多回転検出装置の出力値)}mod Mという剰余演算をして前記テーブルの回転位置の上位データを出力する剰余演算部とを備えたことを特徴としている。
第4の発明の絶対値エンコーダ付きモータは、第1乃至第3ぼいずれかの発明のエンドレス処理装置を備えたことを特徴としている。
第5の発明の駆動系は、第1乃至第3のいずれかのエンドレス処理装置を備えてテーブルを回転することを特徴としている。
第6の発明は、第4の発明のモータを用いてテーブルを回転することを特徴としている。
第2の発明は、前記受信バッファは、前記サンプリング信号に合せて前記絶対値エンコーダの検出信号をシングルカウント値とN進の多回転カウント値とに分けて記憶する第1のメモリと、前記サンプリング信号に合せてそれまで前記第1のメモリに記憶された前記N進の多回転カウント値を記憶する第2のメモリを備えていることを特徴としている。
第3の発明は、前記エンドレス処理部は、前記受信バッファの2つの多回転カウント値を用いてa<N/4且つb>3N/4であればオーバーフロー信号OFをONしa>3N/4且つb<N/4であればアンダーフロー信号UFをONするという処理をしてオーバーフロー信号OFとアンダーフロー信号UFを出力する比較器と、前記オーバーフロー信号OFによってカウントアップし前記アンダーフロー信号UFによってカウントダウンしてカウント値を出力するM進のカウンタと、前記受信バッファの前記多回転カウント値と前記カウンタのカウント値を入力し{(計数値)×N+(多回転検出装置の出力値)}mod Mという剰余演算をして前記テーブルの回転位置の上位データを出力する剰余演算部とを備えたことを特徴としている。
第4の発明の絶対値エンコーダ付きモータは、第1乃至第3ぼいずれかの発明のエンドレス処理装置を備えたことを特徴としている。
第5の発明の駆動系は、第1乃至第3のいずれかのエンドレス処理装置を備えてテーブルを回転することを特徴としている。
第6の発明は、第4の発明のモータを用いてテーブルを回転することを特徴としている。
第1の発明によると、いつも同じ操作をするだけで簡単にエンドレス処理を行うことができるので、ソフトウェアの流れを単純にできて処理時間の見積もりも一定となるという効果がある。またハードウェアで実現しやすいという利点も備えている。さらに任意のエンドレス上限値に対応する場合でも、カウンタの上限値のみを設定すればよく設定が簡単になるという効果がある。
第2の発明によると、多回転量やカウンタの上下限値を0または正の整数から正負整数に拡張することができる。
第3の発明によると、エンコーダに上限値を設定するだけで対応できるようになるという効果がある。
第4の発明によると、回転数の制限なく所望の精度の回転数検出ができるので、絶対値エンコーダ付きモータの制御範囲に制限がなくなり用途が広がるという効果がある。
第5および第6の発明によると、回転数の制限なく所望の精度の回転数検出ができるので、回転駆動装置の回転位置制御をエンドレスにして精度良いものとすることができるという効果がある。
第2の発明によると、多回転量やカウンタの上下限値を0または正の整数から正負整数に拡張することができる。
第3の発明によると、エンコーダに上限値を設定するだけで対応できるようになるという効果がある。
第4の発明によると、回転数の制限なく所望の精度の回転数検出ができるので、絶対値エンコーダ付きモータの制御範囲に制限がなくなり用途が広がるという効果がある。
第5および第6の発明によると、回転数の制限なく所望の精度の回転数検出ができるので、回転駆動装置の回転位置制御をエンドレスにして精度良いものとすることができるという効果がある。
以下、本発明の実施の形態について図を参照して説明する。
図1は本発明の回転数検出装置1を含む回転テーブル駆動装置の構成を示すブロック図であり、図2は回転数検出装置の動作を説明する図、図3は回転数検出装置の構成を示すブロック図である。
図1において1はモータであり、駆動軸3を介して駆動側ギア4を駆動する。そしてギア4とかみ合っている従動側ギア5と回転テーブル6を2つのギアのギア比で減速して回転させる。
モータ1の回転数と角度は絶対値エンコーダ2で検出される。絶対値エンコーダ2はN進のシングルカウンタとM進の多回転カウンタを備えており、N進数でカウントする多回転カウンタのカウント値とシングルカウンタのカウント値がシリアルデータ伝送によって図示しない上位装置へ送信される。回転テーブル6は減速比Mの駆動側ギア4で減速され駆動軸3がM回転したときに1周するようになっている。
図1において1はモータであり、駆動軸3を介して駆動側ギア4を駆動する。そしてギア4とかみ合っている従動側ギア5と回転テーブル6を2つのギアのギア比で減速して回転させる。
モータ1の回転数と角度は絶対値エンコーダ2で検出される。絶対値エンコーダ2はN進のシングルカウンタとM進の多回転カウンタを備えており、N進数でカウントする多回転カウンタのカウント値とシングルカウンタのカウント値がシリアルデータ伝送によって図示しない上位装置へ送信される。回転テーブル6は減速比Mの駆動側ギア4で減速され駆動軸3がM回転したときに1周するようになっている。
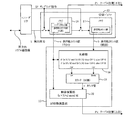
次に図3を用いて回転数検出装置について説明する。回転数検出装置11は回転数演算部12と受信バッファ13、エンコーダI/Fから構成されている。受信バッファ13は2つのメモリ16、17と2つのスイッチを備えており、回転数検出装置12は比較器18とカウンタ19、剰余演算部20を備えている。
この構成で、エンコーダI/Fが絶対値エンコーダ2に検出信号の送信を要求すると、絶対値エンコーダ2は要求された検出信号をエンコーダI/Fに送信する。その検出信号をエンコーダI/Fが受信すると、受信した検出信号Sと受信のタイミングを表すサンプリング信号SPを出力する。
この構成で、エンコーダI/Fが絶対値エンコーダ2に検出信号の送信を要求すると、絶対値エンコーダ2は要求された検出信号をエンコーダI/Fに送信する。その検出信号をエンコーダI/Fが受信すると、受信した検出信号Sと受信のタイミングを表すサンプリング信号SPを出力する。
絶対値エンコーダ2からエンコーダI/Fに送信される検出信号と、エンコーダI/Fから受信バッファ13に出力される検出信号Sは、多回転カウント値とシングルカウント値から構成されており、交互に送信される。エンコーダI/Fから出力された検出信号Sはサンプリング信号SPのタイミングに合せて多回転カウント値とシングルカウント値にわけてメモリ16に格納される。そのとき同時に、それまでメモリ16に格納されていた多回転カウント値が出力されてメモリ17に格納される。従ってメモリ16の多回転カウント値が最新の検出値であり、メモリ17の多回転カウント値がサンプリング信号SPの1サンプリング前の検出値となっている。
メモリ16のシングルカウント値はそのままテーブル位置(下位)PLとして回転数検出装置11から出力される。
メモリ16のシングルカウント値はそのままテーブル位置(下位)PLとして回転数検出装置11から出力される。
メモリ16の多回転カウント値aとメモリ17の多回転カウント値bは回転数演算部12に出力されて比較器18に入力される。そして、a<N/4且つb>3N/4であればオーバーフロー信号OFをONして出力し、a>3N/4且つb<N/4であればアンダーフロー信号UFをONして出力する。
オーバーフロー信号OFとアンダーフロー信号UFはそれぞれM進のカウンタ19のアップカウント入力upとダウンカウント入力downに入力され、パルスが出力されるとそれぞれアップカウント、ダウンカウントされる。カウンタ19のカウント値cとメモリ16の多回転カウント値aは剰余演算部20に入力されて
(c×N+a) mod M
という式で演算され、その演算結果がテーブル位置(上位)PUとなって回転数演算部12から出力される。
なお、modは剰余を計算する演算子を表しており、上式の( )内の値は図2のモータの累積回転量23を示している。モータがM回転するとテーブルは元に戻り、このことは( )をMで割った余りがテーブル6の位置22を示していることに対応している。
テーブル位置(上位)PUとテーブル位置(下位)PLは、例えば図4に示すような位置制御系で使い分けられる。速度制御ループでは1回転内位置の情報を持つテーブル位置(下位)PLをフィードバックすればよく、テーブル位置(下位)PLから速度が求められて速度情報として帰還され速度制御される。同じく位置制御の偏差をなくすため位置司令部が出力する位置指令とテーブル位置(下位)PLの差が偏差カウンタで求められてその差が小さくなるよう制御される。最も外側にある位置制御ループでは回転数検出装置11のテーブル位置(上位)PUとテーブル位置(下位)PLがフィードバックされ位置制御に使われる。
オーバーフロー信号OFとアンダーフロー信号UFはそれぞれM進のカウンタ19のアップカウント入力upとダウンカウント入力downに入力され、パルスが出力されるとそれぞれアップカウント、ダウンカウントされる。カウンタ19のカウント値cとメモリ16の多回転カウント値aは剰余演算部20に入力されて
(c×N+a) mod M
という式で演算され、その演算結果がテーブル位置(上位)PUとなって回転数演算部12から出力される。
なお、modは剰余を計算する演算子を表しており、上式の( )内の値は図2のモータの累積回転量23を示している。モータがM回転するとテーブルは元に戻り、このことは( )をMで割った余りがテーブル6の位置22を示していることに対応している。
テーブル位置(上位)PUとテーブル位置(下位)PLは、例えば図4に示すような位置制御系で使い分けられる。速度制御ループでは1回転内位置の情報を持つテーブル位置(下位)PLをフィードバックすればよく、テーブル位置(下位)PLから速度が求められて速度情報として帰還され速度制御される。同じく位置制御の偏差をなくすため位置司令部が出力する位置指令とテーブル位置(下位)PLの差が偏差カウンタで求められてその差が小さくなるよう制御される。最も外側にある位置制御ループでは回転数検出装置11のテーブル位置(上位)PUとテーブル位置(下位)PLがフィードバックされ位置制御に使われる。
このように、モータがN×M回転したときはカウンタ19がちょうど1周してモータ1の多回転量とカウンタ19の多回転カウント値はかならず同じ状態に戻る。このため、従来技術で示したような、カウンタのオーバーフローの判断や、オーバーフロー毎に多回転位置にオフセットを履かせる操作は不要となるのである。
なお、実際のテーブルの位置を知るには、剰余演算部20で剰余を求め、実位置と1対1となるテーブル位置を算出しなければならない。また、多回転カウント値を0または正の整数としてきたが、任意の一定の整数値を差し引く操作、あるいは解釈を追加することにより、上限値と下限値の値を負の整数に拡張することができる。さらに、本発明の回転数検出装置は絶対値エンコーダ2の外部に置かれているが、内蔵しても良い。内蔵するときは予めマシンの多回転上限値を示す情報を絶対値エンコーダ2に設定しておけばよい。
なお、実際のテーブルの位置を知るには、剰余演算部20で剰余を求め、実位置と1対1となるテーブル位置を算出しなければならない。また、多回転カウント値を0または正の整数としてきたが、任意の一定の整数値を差し引く操作、あるいは解釈を追加することにより、上限値と下限値の値を負の整数に拡張することができる。さらに、本発明の回転数検出装置は絶対値エンコーダ2の外部に置かれているが、内蔵しても良い。内蔵するときは予めマシンの多回転上限値を示す情報を絶対値エンコーダ2に設定しておけばよい。
本発明は、上限がある計数値を出力して任意の上限値の値に変換するような装置、すなわち、割り出しテーブルや、ギアやタイミングベルトを介した搬送装置の位置検出などの幅広い分野の装置に適用することができる。
1 モータ、 2 絶対値エンコーダ、 3 駆動軸、
4 駆動側ギア、 5 従動側ギア、 6 回転テーブル、
7 多回転位置、 10a テーブル位置(上位)、
10b テーブル位置(下位)、 11 回転数検出装置、
12 回転数演算部、 3 受信バッファ、 14 受信データ、
15 サンプリング信号、 16 今回位置格納メモリ、
17 前回位置格納メモリ、 18 比較器、 19 カウンタ、
20 剰余演算部、 21 多回転量データの変化、 22 テーブル位置、
23 回転数検出装置累積回転量、 24 回転数検出装置カウンタ値
4 駆動側ギア、 5 従動側ギア、 6 回転テーブル、
7 多回転位置、 10a テーブル位置(上位)、
10b テーブル位置(下位)、 11 回転数検出装置、
12 回転数演算部、 3 受信バッファ、 14 受信データ、
15 サンプリング信号、 16 今回位置格納メモリ、
17 前回位置格納メモリ、 18 比較器、 19 カウンタ、
20 剰余演算部、 21 多回転量データの変化、 22 テーブル位置、
23 回転数検出装置累積回転量、 24 回転数検出装置カウンタ値
Claims (6)
- N進のシングルカウンタとM進の多回転カウンタからなる絶対値エンコーダを備えたモータがギアで減速してテーブルを駆動する回転駆動装置において、
前記絶対値エンコーダの検出信号を受けるとサンプリング信号と前記検出信号を出力するエンコーダI/Fと、
前記サンプリング信号に合せて前記検出信号を記憶して前記検出信号に含まれるシングルカウント値を前記テーブルの回転位置の下位データとして出力すると共に記憶した前記検出信号に含まれる多回転カウント値と1サンプリング前の多回転カウント値を出力する受信バッファと、
前記受信バッファの2つの前記多回転カウント値から前記テーブルの回転位置の上位データを求める回転数演算部と
からなることを特徴とする回転数検出装置。 - 前記受信バッファは、前記サンプリング信号に合せて前記絶対値エンコーダの検出信号をシングルカウント値とN進の多回転カウント値aとに分けて記憶する第1のメモリと、前記サンプリング信号に合せてそれまで前記第1のメモリに記憶された前記N進の多回転カウント値bを記憶する第2のメモリを備えていることを特徴とする請求項1に記載の回転数検出装置。
- 前記回転数演算部は、前記受信バッファの2つの多回転カウント値a、bを用いて
a<N/4且つb>3N/4であればオーバーフロー信号OFをONし
a>3N/4且つb<N/4であればアンダーフロー信号UFをONする
という処理をしてオーバーフロー信号OFとアンダーフロー信号UFを出力する比較器と、
前記オーバーフロー信号OFによってカウントアップし前記アンダーフロー信号UFによってカウントダウンしてカウント値cを出力するM進のカウンタと、
前記受信バッファの前記多回転カウント値aと前記カウンタのカウント値cを入力し
(c×N+a) mod M
という剰余演算をして前記テーブルの回転位置の上位データを出力する剰余演算部と
を備えたことを特徴とする請求項2に記載の回転数検出装置。 - 請求項1乃至3のいずれかに記載された回転数検出装置を備えたことを特徴とする絶対値エンコーダ付きモータ。
- 請求項1乃至3のいずれかに記載の回転数検出装置を備えてテーブルを回転することを特徴とする回転駆動装置。
- 請求項4に記載の絶対値エンコーダ付きモータを用いてテーブルを回転することを特徴とする回転駆動装置。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2005191140A JP2007010461A (ja) | 2005-06-30 | 2005-06-30 | 回転数検出装置および絶対値エンコーダ付きモータ並びに回転駆動装置 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2005191140A JP2007010461A (ja) | 2005-06-30 | 2005-06-30 | 回転数検出装置および絶対値エンコーダ付きモータ並びに回転駆動装置 |
Publications (1)
| Publication Number | Publication Date |
|---|---|
| JP2007010461A true JP2007010461A (ja) | 2007-01-18 |
Family
ID=37749178
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2005191140A Pending JP2007010461A (ja) | 2005-06-30 | 2005-06-30 | 回転数検出装置および絶対値エンコーダ付きモータ並びに回転駆動装置 |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP2007010461A (ja) |
Cited By (8)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2009222576A (ja) * | 2008-03-17 | 2009-10-01 | Tamagawa Seiki Co Ltd | アブソリュートセンサの多回転検出方法 |
| JP2011110615A (ja) * | 2009-11-24 | 2011-06-09 | Gunma Prefecture | ロータリーダイカッターシステム |
| JP2012145380A (ja) * | 2011-01-07 | 2012-08-02 | Oriental Motor Co Ltd | 多回転アブソリュート回転角検出装置 |
| JP2012237633A (ja) * | 2011-05-11 | 2012-12-06 | Oriental Motor Co Ltd | 多回転アブソリュート回転角検出装置 |
| JP2014126646A (ja) * | 2012-12-26 | 2014-07-07 | Canon Inc | 駆動装置およびそれを有するレンズ装置及び撮影装置 |
| WO2016068302A1 (ja) * | 2014-10-30 | 2016-05-06 | 株式会社ニコン | エンコーダ装置、駆動装置、ステージ装置、ロボット装置、及び多回転情報算出方法 |
| CN106330016A (zh) * | 2016-10-27 | 2017-01-11 | 重庆华数机器人有限公司 | 一种交流伺服电机的速度检测方法及系统 |
| WO2024009514A1 (ja) * | 2022-07-08 | 2024-01-11 | ファナック株式会社 | 位置検出システム、アクチュエータおよび位置検出方法 |
-
2005
- 2005-06-30 JP JP2005191140A patent/JP2007010461A/ja active Pending
Cited By (10)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2009222576A (ja) * | 2008-03-17 | 2009-10-01 | Tamagawa Seiki Co Ltd | アブソリュートセンサの多回転検出方法 |
| JP2011110615A (ja) * | 2009-11-24 | 2011-06-09 | Gunma Prefecture | ロータリーダイカッターシステム |
| JP2012145380A (ja) * | 2011-01-07 | 2012-08-02 | Oriental Motor Co Ltd | 多回転アブソリュート回転角検出装置 |
| JP2012237633A (ja) * | 2011-05-11 | 2012-12-06 | Oriental Motor Co Ltd | 多回転アブソリュート回転角検出装置 |
| JP2014126646A (ja) * | 2012-12-26 | 2014-07-07 | Canon Inc | 駆動装置およびそれを有するレンズ装置及び撮影装置 |
| WO2016068302A1 (ja) * | 2014-10-30 | 2016-05-06 | 株式会社ニコン | エンコーダ装置、駆動装置、ステージ装置、ロボット装置、及び多回転情報算出方法 |
| JPWO2016068302A1 (ja) * | 2014-10-30 | 2017-08-10 | 株式会社ニコン | エンコーダ装置、駆動装置、ステージ装置、ロボット装置、及び多回転情報算出方法 |
| CN107110669A (zh) * | 2014-10-30 | 2017-08-29 | 株式会社尼康 | 编码器装置、驱动装置、平台装置、机器人装置以及多旋转信息算出方法 |
| CN106330016A (zh) * | 2016-10-27 | 2017-01-11 | 重庆华数机器人有限公司 | 一种交流伺服电机的速度检测方法及系统 |
| WO2024009514A1 (ja) * | 2022-07-08 | 2024-01-11 | ファナック株式会社 | 位置検出システム、アクチュエータおよび位置検出方法 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP2007010461A (ja) | 回転数検出装置および絶対値エンコーダ付きモータ並びに回転駆動装置 | |
| JP5360254B2 (ja) | トルク検出方法及びアーム装置 | |
| US7925462B2 (en) | Position-measuring device and method for transmitting information concerning movement | |
| JP2008039737A (ja) | 多回転量算出方法、バッテリーレス多回転式絶対値エンコーダ装置およびこれを用いた減速機付アクチュエータ | |
| JP2016004013A (ja) | アブソリュートエンコーダ及び回転位置データ伝送方法 | |
| US11293781B2 (en) | Encoder and encoder control system | |
| JP4229823B2 (ja) | 歯車破損検出装置および歯車破損検出方法 | |
| JP4212372B2 (ja) | エンコーダ信号処理装置およびサーボドライバ | |
| JP2006333677A (ja) | 超音波モータ制御装置 | |
| JP2008041011A (ja) | 工作機械における位置補正方法 | |
| CN110192341B (zh) | 电动机控制装置 | |
| KR102419489B1 (ko) | 모터 속도 측정 장치 및 방법 | |
| JP2017151937A (ja) | 制御装置、制御プログラムおよび記録媒体 | |
| JP5458543B2 (ja) | 回転体駆動制御装置 | |
| JP5353386B2 (ja) | モータ駆動装置 | |
| CN110940359B (zh) | 编码器和控制系统 | |
| JPH09101175A (ja) | 多回転形絶対値エンコーダ | |
| JP6101117B2 (ja) | パルスモータ制御装置 | |
| CN110940360B (zh) | 编码器和控制系统 | |
| JP4202187B2 (ja) | エンコーダのデータ送受信方法及び装置 | |
| JPH04136704A (ja) | 位置検出装置 | |
| JP5598203B2 (ja) | サーボシステム | |
| JP4193203B2 (ja) | 多回転量検出装置および多回転量検出方法並びに多回転量検出装置付きサーボモータ | |
| JP6063190B2 (ja) | パルスモータ制御装置およびパルス信号生成方法 | |
| JPH09165131A (ja) | ディジタル巻径演算装置 |