JP2006347754A - 物品受渡装置 - Google Patents
物品受渡装置 Download PDFInfo
- Publication number
- JP2006347754A JP2006347754A JP2005179558A JP2005179558A JP2006347754A JP 2006347754 A JP2006347754 A JP 2006347754A JP 2005179558 A JP2005179558 A JP 2005179558A JP 2005179558 A JP2005179558 A JP 2005179558A JP 2006347754 A JP2006347754 A JP 2006347754A
- Authority
- JP
- Japan
- Prior art keywords
- article
- conveyor
- robot
- deceleration
- holding machine
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Pending
Links
- 230000005856 abnormality Effects 0.000 abstract description 5
- 230000001133 acceleration Effects 0.000 description 13
- 238000005192 partition Methods 0.000 description 7
- 230000005540 biological transmission Effects 0.000 description 1
- 238000001514 detection method Methods 0.000 description 1
- 238000010586 diagram Methods 0.000 description 1
- 238000004806 packaging method and process Methods 0.000 description 1
- 230000001360 synchronised effect Effects 0.000 description 1
Images




Landscapes
- Specific Conveyance Elements (AREA)
- Manipulator (AREA)
- Control Of Conveyors (AREA)
Abstract
【課題】 搬送面上に形成された物品受容部に物品を載置して搬送するコンベヤと、前記物品受容部に対してトラッキング動作しながら該物品受容部との間で前記物品の授受を行なう物品保持機と、を具備する物品受渡装置に於いて、異常が発生した際の急停止時にコンベヤと物品保持機の同期が崩れるのを防止する。
【解決手段】 前記トラッキング動作中に前記コンベヤ及び前記物品保持機を急停止させるときには、前記物品保持機の前記トラッキング動作を中断し、物品保持状態で減速可能な値として予め設定さている物品保持機の設定減速度、又は、コンベヤの設定減速度うち、小さい方の設定減速度を用いてコンベヤ及び物品保持機を停止させる。
【選択図】 図1
【解決手段】 前記トラッキング動作中に前記コンベヤ及び前記物品保持機を急停止させるときには、前記物品保持機の前記トラッキング動作を中断し、物品保持状態で減速可能な値として予め設定さている物品保持機の設定減速度、又は、コンベヤの設定減速度うち、小さい方の設定減速度を用いてコンベヤ及び物品保持機を停止させる。
【選択図】 図1
Description
本発明は、ロボット等の物品保持機と搬送コンベヤとの間で物品の授受を行なう物品受渡装置に関するもので、例えば、自動包装機の搬送コンベヤとロボットとの間で被包装物を受け渡す装置に適用できる。
自動包装機等の分野では、コンベヤ上のバケット部に被包装物たる物品をロボットで投入する物品受渡装置が広く使用されている。
図3は、この種の物品受渡装置の概略図であり、このものは、コンベヤ(1)の外周のバケット部(11)をロボット(21)でトラッキングしながら、該バケット部(11)に物品(W)を投入する。
図3は、この種の物品受渡装置の概略図であり、このものは、コンベヤ(1)の外周のバケット部(11)をロボット(21)でトラッキングしながら、該バケット部(11)に物品(W)を投入する。
コンベヤ(1)には、これの移動量や速度を検出する位置・速度検出器(12)や、ロボット(21)のトラッキング動作を開始させるトリガ信号を出力する追従開始センサ(10)(例えば、バケット部(11)(11)の区画板(110)(110)を検知する)が連結されており、位置・速度検出器(12)から出力されるコンベヤ(1)の移動量データや速度データはロボット(21)の動作をコントロールするロボット制御装置(20)に印加されている。又、コンベヤ(1)の駆動モータ(13)は、前記ロボット制御装置(20)と送受信機能を有するコンベヤ制御装置(14)で制御されている。
図3のものでは、ロボット(21)のロボットアーム(211)下部に設けられた物品保持部(210)で物品(W)を吸着保持するようになっており、物品保持状態で、ロボット制御装置(20)から出力されるコンベヤ(1)の移動量データや速度データ、更に、ロボットアーム(211)の位置データ等に基づき、ロボット(21)にバケット部(11)をトラッキングさせる制御が行なわれる。そして、バケット部(11)に物品を載置するときには、バケット部(11)にロボットアーム(211)を上方から対向させ、その後、ロボットアーム(211)を降下させて物品(W)の保持を解除する。これにより、物品(W)がバケット部(11)に投入される。
特開2004−196495号公報
しかしながら、上記従来のものでは、異常が発生してコンベヤ(1)やロボット(21)を急停止させる必要が生じた場合には、ロボットアーム(211)に保持された物品(W)とバケット部(11)とが干渉し、これにより、バケット部(11)の区画板(110)や物品(W)が破損したり、又、ロボット(21)の駆動部に過剰な負荷が掛かって故障が発生する場合がある。その内容を更に詳述する。
図3の物品受渡装置では、前記急停止時にロボット(21)の減速度が大きすぎると、物品(W)の慣性力が増大して該物品(W)が物品保持部(210)から脱落する場合が生じる。このことから、この種の物品受渡装置では、既定の減速度では物品(W)を安定的に保持できない恐れがあるときは、処理対象たる物品(W)の種類変更時等に於いて、ロボット(21)を停止させる際の減速度(以下、「ロボット設定減速度」という。)をティーチング装置(図示せず)からロボット制御装置(20)のパラメータ設定部(200)に書き込む作業が行なわれることがある。
ところが、前記パラメータ設定部(200)に書き込まれたロボット設定減速度と、コンベヤ(1)を停止させる際のコンベヤ設定減速度(コンベヤ制御装置(14)のパラメータ設定部(140)に設定されている)は、一致していない場合がある。
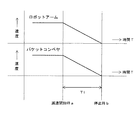
そして、ロボット設定減速度よりもコンベヤ設定減速度が大きい値に設定されている場合には、異常発生時にコンベヤ(1)をコンベヤ設定減速度で急停止させると、図5に示すように、トラッキング動作するロボット(21)がコンベヤ(1)に追随できずに停止位置(S)から行き過ぎてしまい、その後、停止位置(S)まで後退する。このように、従来のものでは、急停止時にロボット(21)とコンベヤ(1)の同期が崩れ、ロボット(21)に保持された物品(W)がバケット部(11)の区画板(110)に衝突してこれらが損傷したり、ロボット(21)の駆動部に過剰な負荷が掛かって故障が発生するのである。
そして、ロボット設定減速度よりもコンベヤ設定減速度が大きい値に設定されている場合には、異常発生時にコンベヤ(1)をコンベヤ設定減速度で急停止させると、図5に示すように、トラッキング動作するロボット(21)がコンベヤ(1)に追随できずに停止位置(S)から行き過ぎてしまい、その後、停止位置(S)まで後退する。このように、従来のものでは、急停止時にロボット(21)とコンベヤ(1)の同期が崩れ、ロボット(21)に保持された物品(W)がバケット部(11)の区画板(110)に衝突してこれらが損傷したり、ロボット(21)の駆動部に過剰な負荷が掛かって故障が発生するのである。
本発明はかかる点に鑑みて成されたもので、
『搬送面上に形成された物品受容部に物品を載置して搬送するコンベヤと、
前記物品受容部に対してトラッキング動作しながら該物品受容部との間で前記物品の授受を行なう物品保持機と、を具備する物品受渡装置』に於いて、異常が発生した際の急停止時にコンベヤと物品保持機の同期が崩れるのを防止し、これにより、物品やコンベヤの破損、更には、物品保持機の駆動部に過剰負荷が掛かることによる故障を未然に防止することを課題とする。
『搬送面上に形成された物品受容部に物品を載置して搬送するコンベヤと、
前記物品受容部に対してトラッキング動作しながら該物品受容部との間で前記物品の授受を行なう物品保持機と、を具備する物品受渡装置』に於いて、異常が発生した際の急停止時にコンベヤと物品保持機の同期が崩れるのを防止し、これにより、物品やコンベヤの破損、更には、物品保持機の駆動部に過剰負荷が掛かることによる故障を未然に防止することを課題とする。
1.上記課題を解決する為の請求項1に係る発明の解決手段は、
『前記トラッキング動作中に前記コンベヤ及び前記物品保持機を急停止させるときには、前記物品保持機の前記トラッキング動作を中断し、物品保持状態で減速可能な値として予め設定さている物品保持機の設定減速度、又は、コンベヤの設定減速度のうち、小さい方の設定減速度を用いてコンベヤ及び物品保持機を停止させる』ことである。
上記解決手段によれば、予め設定された物品保持機の設定減速度(物品保持状態で減速可能な値に設定されている)、又は、コンベヤの設定減速度のうち、小さい方の減速度を用いてコンベヤ及び物品保持機を停止させる。従って、物品保持機の設定減速度(物品保持状態で減速可能な値に設定されている)以下の共通の減速度でコンベヤ及び物品保持機が減速しながら同時停止する。これにより、物品保持機が物品を保持したままコンベヤと同期して停止する。従って、急停止時にコンベヤと物品保持機の同期が崩れるのが防止され、物品やコンベヤの破損、更には、物品保持機の駆動部に過剰負荷が掛かることによる故障を未然に防止することができる。
『前記トラッキング動作中に前記コンベヤ及び前記物品保持機を急停止させるときには、前記物品保持機の前記トラッキング動作を中断し、物品保持状態で減速可能な値として予め設定さている物品保持機の設定減速度、又は、コンベヤの設定減速度のうち、小さい方の設定減速度を用いてコンベヤ及び物品保持機を停止させる』ことである。
上記解決手段によれば、予め設定された物品保持機の設定減速度(物品保持状態で減速可能な値に設定されている)、又は、コンベヤの設定減速度のうち、小さい方の減速度を用いてコンベヤ及び物品保持機を停止させる。従って、物品保持機の設定減速度(物品保持状態で減速可能な値に設定されている)以下の共通の減速度でコンベヤ及び物品保持機が減速しながら同時停止する。これにより、物品保持機が物品を保持したままコンベヤと同期して停止する。従って、急停止時にコンベヤと物品保持機の同期が崩れるのが防止され、物品やコンベヤの破損、更には、物品保持機の駆動部に過剰負荷が掛かることによる故障を未然に防止することができる。
2.上記課題を解決する為の請求項2に係る発明の解決手段は、
『前記トラッキング動作中に前記コンベヤ及び前記物品保持機を急停止させるときには、前記物品保持機の前記トラッキング動作を中断し、物品保持状態で減速して停止させるまでの所要時間として予め設定されている物品保持機の減速所要時間、又は、コンベヤの減速所要時間のうち、長い方の減速所要時間を用いてコンベヤ及び物品保持機を停止させる』ことである。
上記解決手段によれば、予め設定された物品保持機の減速所要時間(物品保持状態で減速して停止させるまでの時間)、又は、コンベヤ減速所要時間のうち、長い減速所要時間を用いてコンベヤ及び物品保持機を停止させる。従って、予め物品保持機用に設定されている減速所要時間(物品を保持した状態で減速させ得る時間)以上の共通の所要時間でコンベヤ及び物品保持機が減速して同時停止する。これにより、物品保持機が物品を保持したままコンベヤと同期して停止する。従って、急停止時にコンベヤと物品保持機の同期が崩れるのが防止され、物品やコンベヤの破損、更には、物品保持機の駆動部に過剰負荷が掛かることによる故障を未然に防止することができる。
『前記トラッキング動作中に前記コンベヤ及び前記物品保持機を急停止させるときには、前記物品保持機の前記トラッキング動作を中断し、物品保持状態で減速して停止させるまでの所要時間として予め設定されている物品保持機の減速所要時間、又は、コンベヤの減速所要時間のうち、長い方の減速所要時間を用いてコンベヤ及び物品保持機を停止させる』ことである。
上記解決手段によれば、予め設定された物品保持機の減速所要時間(物品保持状態で減速して停止させるまでの時間)、又は、コンベヤ減速所要時間のうち、長い減速所要時間を用いてコンベヤ及び物品保持機を停止させる。従って、予め物品保持機用に設定されている減速所要時間(物品を保持した状態で減速させ得る時間)以上の共通の所要時間でコンベヤ及び物品保持機が減速して同時停止する。これにより、物品保持機が物品を保持したままコンベヤと同期して停止する。従って、急停止時にコンベヤと物品保持機の同期が崩れるのが防止され、物品やコンベヤの破損、更には、物品保持機の駆動部に過剰負荷が掛かることによる故障を未然に防止することができる。
以上のように、請求項1,2に係る発明によれば、急停止時にコンベヤと物品保持機の同期が崩れるのが防止され、物品やコンベヤの破損、更には、物品保持機の駆動部に過剰負荷が掛かることによる故障を未然に防止することができる。
以下に、本発明を実施するための最良の形態について添付図面を参照しながら説明する。
本実施の形態に係る物品受渡装置の構成は、既述図3のものと同様に構成されているので、既に説明した構成と重複しない範囲で記載する。
本実施の形態に係る物品受渡装置の構成は、既述図3のものと同様に構成されているので、既に説明した構成と重複しない範囲で記載する。
[第1実施形態]
先ず、第1実施形態について説明する。
ロボット制御装置(20)のパラメータ設定部(200)には、ロボットアーム(211)(既述発明特定事項たる「物品保持機」に対応している。)の動作軌跡,移動速度RV,更に、ロボットアーム(211)を加速する際のロボット設定加速度Rα1,及び、停止させる際のロボット設定減速度Rα2が格納されている。そして、上記ロボットアーム(211)のロボット設定加速度Rα1やロボット設定減速度Rα2は、ロボットアーム(211)下部の物品保持部(210)に吸着保持された物品(W)が加減速による慣性力で物品保持部(210)から脱落しない値、即ち、物品保持状態で減速可能な値に設定されている。
先ず、第1実施形態について説明する。
ロボット制御装置(20)のパラメータ設定部(200)には、ロボットアーム(211)(既述発明特定事項たる「物品保持機」に対応している。)の動作軌跡,移動速度RV,更に、ロボットアーム(211)を加速する際のロボット設定加速度Rα1,及び、停止させる際のロボット設定減速度Rα2が格納されている。そして、上記ロボットアーム(211)のロボット設定加速度Rα1やロボット設定減速度Rα2は、ロボットアーム(211)下部の物品保持部(210)に吸着保持された物品(W)が加減速による慣性力で物品保持部(210)から脱落しない値、即ち、物品保持状態で減速可能な値に設定されている。
コンベヤ(1)の搬送面には既述発明特定事項たる「物品受容部」に対応するバケット部(11)(11)が一定ピッチで配設されている。又、コンベヤ(1)の駆動側プーリ(15)に連結された駆動モータ(13)を制御するコンベヤ制御装置(14)のパラメータ設定部(140)には、コンベヤ(1)の走行速度CV,コンベヤを加速する際のコンベヤ設定加速度Cα1,コンベヤを停止させる際のコンベヤ設定減速度Cα2がパラメータ設定部(140)に格納されている。
又、コンベヤ制御装置(14)やロボット制御装置(20)にはコントローラ(5)が配線接続されていると共に、コンベヤ制御装置(14)とロボット制御装置(20),コンベヤ制御装置(14)と駆動モータ(13),ロボット制御装置(20)とロボット(21)は、夫々バス(B1)(B2)(B3)で繋がっている。
次に、本実施の形態に係る物品受渡装置の制御動作を図1に基づいて説明する。
コントローラ(5)に設けられた運転スイッチ(50)を操作すると、ロボット制御装置(20)やコンベヤ制御装置(14)によるロボット(21)やコンベヤ(1)の制御が開始する。
図1の(イ)はロボット(21)の制御用のフローチャートである。
先ず、ステップ(ST21)で図示しない物品ストック部にストックされた物品(W)をロボットアーム(211)の物品保持部(210)で吸着保持する。次に、ステップ(ST22)で、待機位置(例えば、追従開始センサ(10)の上方位置)までロボットアーム(211)を移動させる。次に、追従開始センサ(10)の上方を区画板(110)が通過して該追従開始センサ(10)からトリガ信号が出力されるのをステップ(ST23)で監視する。
コントローラ(5)に設けられた運転スイッチ(50)を操作すると、ロボット制御装置(20)やコンベヤ制御装置(14)によるロボット(21)やコンベヤ(1)の制御が開始する。
図1の(イ)はロボット(21)の制御用のフローチャートである。
先ず、ステップ(ST21)で図示しない物品ストック部にストックされた物品(W)をロボットアーム(211)の物品保持部(210)で吸着保持する。次に、ステップ(ST22)で、待機位置(例えば、追従開始センサ(10)の上方位置)までロボットアーム(211)を移動させる。次に、追従開始センサ(10)の上方を区画板(110)が通過して該追従開始センサ(10)からトリガ信号が出力されるのをステップ(ST23)で監視する。
次に、追従開始センサ(10)からトリガ信号が出力されると、この状態からロボットアーム(211)をロボット設定加速度Rα1で加速して目標とするバケット部(11)に対してトラッキング動作させる(ステップ(ST24)参照)。そして、このトラッキング動作時には、位置・速度検出器(12)から出力されるコンベヤ(1)の移動量データや速度データに基づいてロボット制御装置(20)がロボット(21)を制御する。
次に、ステップ(ST25)で急停止信号(コントローラ(5)の急停止スイッチ(51)の投入信号、又は、異常検知によって自動的に出力される信号)の有無を判断し、急停止信号が発生していない場合は、更にステップ(ST26)で、ロボットアーム(211)の物品保持部(210)が目標とするバケット部(11)に対応する位置、即ち、物品(W)の保持を解除する位置に到達したか否かを判断する。そして、物品(W)の保持を解除する位置に到達した場合は、ステップ(ST27)でロボットアーム(211)を降下させて物品保持部(210)から物品(W)を開放し、これにより、物品(W)をバケット部(11)に投入する。その後、制御動作はステップ(ST21)の工程に戻される。
次に、ステップ(ST25)を実行したときに、急停止信号が発生している場合は、トラッキング動作(ステップ(ST24)のトラッキング制御)を中断してステップ(ST28)に分岐し、これにより、ロボット設定減速度Rα2でロボットアーム(211)を停止させる。すると、図2で示すように、ロボットアーム(211)は、減速開始時aから停止時bまで、直線的に減速して停止する。この場合、ロボット設定減速度Rα2は、物品(W)が減速による慣性力で物品保持部(210)から脱落しない値に設定されている。従って、物品(W)はロボットアーム(211)に保持された状態に維持される。
一方、図4の(ロ)のステップ(ST31)に示すように、コンベヤ制御装置(14)は、運転スイッチ(50)の投入時に於いて、ロボット制御装置(20)からロボット設定減速度Rα2を読み込んでおり、ステップ(ST32)のコンベヤ走行中にステップ(ST33)で急停止信号が発生すると、ステップ(ST34)に於いて、前記ロボット設定減速度Rα2でコンベヤ(1)を停止させる。すると、図2に示すように、コンベヤ(1)は、減速開始時aから停止時bまで、直線的に減速してロボットアーム(211)と同時停止する。
これにより、ロボットアーム(211)に保持された物品(W)がバケット部(11)の区画板(110)と衝突することなく停止する。よって、物品(W)やコンベヤ(1)の破損、更には、ロボット(21)の駆動部に過剰負荷が掛かることによる故障を未然に防止することができる。
尚、ロボット設定減速度Rα2に比べてコンベヤ設定減速度Cα2が小さい値に設定されている場合は、ステップ(ST28)やステップ(ST34)でロボットアーム(211)やコンベヤ(1)をコンベヤ設定減速度Cα2で減速させ、これにより、コンベヤ(1)とロボットアーム(211)を同時停止させる。
尚、ロボット設定減速度Rα2に比べてコンベヤ設定減速度Cα2が小さい値に設定されている場合は、ステップ(ST28)やステップ(ST34)でロボットアーム(211)やコンベヤ(1)をコンベヤ設定減速度Cα2で減速させ、これにより、コンベヤ(1)とロボットアーム(211)を同時停止させる。
[第2実施形態]
次に、本発明の第2実施形態を説明する。
このものでは、ロボット制御装置(20)のパラメータ設定部(200)には、ロボットアーム(211)の動作軌跡,移動速度RV,最大速度で動作しているロボットアーム(211)を最短時間で停止させるまでのロボット減速所要時間RT1,及び、停止状態にあるロボットアーム(211)を最短時間で最大速度に加速するまでのロボット加速所要時間RT2が格納されている。尚、ロボット減速所要時間RT1やロボット加速所要時間RT2は、ロボットアーム(211)下部の物品保持部(210)に吸着保持された物品(W)が加減速による慣性力で物品保持部(210)から脱落しない値、即ち、物品保持状態で加減速できる値に設定されている。
次に、本発明の第2実施形態を説明する。
このものでは、ロボット制御装置(20)のパラメータ設定部(200)には、ロボットアーム(211)の動作軌跡,移動速度RV,最大速度で動作しているロボットアーム(211)を最短時間で停止させるまでのロボット減速所要時間RT1,及び、停止状態にあるロボットアーム(211)を最短時間で最大速度に加速するまでのロボット加速所要時間RT2が格納されている。尚、ロボット減速所要時間RT1やロボット加速所要時間RT2は、ロボットアーム(211)下部の物品保持部(210)に吸着保持された物品(W)が加減速による慣性力で物品保持部(210)から脱落しない値、即ち、物品保持状態で加減速できる値に設定されている。
又、コンベヤ制御装置(14)内には、コンベヤ(1)の走行速度CV,最大速度で走行しているコンベヤ(1)を停止させるまでのコンベヤ減速所要時間CT1,及び、停止しているコンベヤ(1)を最大速度まで加速するまでの加速所要時間CT2等を格納するパラメータ設定部(140)が設けられている。
次に、本実施の形態に係る物品受渡装置の制御動作を図4に従って説明する。
このものでは、ステップ(ST28a)(ST31a)(ST34a)が図1のステップ(ST28)(ST31)(ST34)と相違する点、及び、トリガ信号が出力されたときにロボットアーム(211)をロボット加速所要時間RT2で加速する点を除いて、既述第1実施形態と同様の制御がされる。
ステップ(ST25a)を実行したときに、急停止信号が発生している場合は、ロボット(21)のトラッキング動作を中断してステップ(ST28a)に制御を分岐させ、これにより、ロボット減速所要時間RT1でロボットアーム(211)を停止させる。すると、図2で示すように、ロボットアーム(211)は、減速開始時aから停止時bまで、ロボット減速所要時間RT1で且つ一定減速度で停止する。この場合、ロボット減速所要時間RT1は、物品(W)が減速による慣性力で物品保持部(210)から脱落しない値に設定されている。従って、物品(W)はロボット(21)に保持された状態に維持される。
このものでは、ステップ(ST28a)(ST31a)(ST34a)が図1のステップ(ST28)(ST31)(ST34)と相違する点、及び、トリガ信号が出力されたときにロボットアーム(211)をロボット加速所要時間RT2で加速する点を除いて、既述第1実施形態と同様の制御がされる。
ステップ(ST25a)を実行したときに、急停止信号が発生している場合は、ロボット(21)のトラッキング動作を中断してステップ(ST28a)に制御を分岐させ、これにより、ロボット減速所要時間RT1でロボットアーム(211)を停止させる。すると、図2で示すように、ロボットアーム(211)は、減速開始時aから停止時bまで、ロボット減速所要時間RT1で且つ一定減速度で停止する。この場合、ロボット減速所要時間RT1は、物品(W)が減速による慣性力で物品保持部(210)から脱落しない値に設定されている。従って、物品(W)はロボット(21)に保持された状態に維持される。
一方、図4の(ロ)のステップ(ST31a)に示すように、コンベヤ制御装置(14)は、運転スイッチ(50)の投入時に於いて、ロボット制御装置(20)からロボット減速所要時間RT1を読み込んでおり、コンベヤ走行中にステップ(ST33a)で急停止信号が発生すると、ステップ(ST34a)に於いて、前記ロボット減速所要時間RT1でコンベヤ(1)を停止させる。すると、図2に示すように、コンベヤ(1)は、減速開始時aから停止時bまで、ロボット減速所要時間RT1の時間を掛けて一定減速度(ロボットアーム(211)の減速度と同じ値)で停止し、これにより、ロボットアーム(211)と同期動作しながら停止する。
これにより、ロボットアーム(211)に保持された物品(W)がバケット部(11)の区画板(110)と衝突することなく全体が停止する。よって、物品(W)や区画板(110)の破損、更には、ロボット(21)の駆動部に過剰負荷が掛かることによる故障を未然に防止することができる。
尚、ロボット減速所要時間RT1に比べてコンベヤ減速所要時間CT1が大きい値に設定されている場合は、ステップ(ST8)やステップ(ST14)でロボットアーム(211)やコンベヤ(1)をコンベヤ減速所要時間CT1で停止させ、これにより、ロボットアーム(211)とコンベヤ(1)を同時停止させる。
尚、ロボット減速所要時間RT1に比べてコンベヤ減速所要時間CT1が大きい値に設定されている場合は、ステップ(ST8)やステップ(ST14)でロボットアーム(211)やコンベヤ(1)をコンベヤ減速所要時間CT1で停止させ、これにより、ロボットアーム(211)とコンベヤ(1)を同時停止させる。
尚、上記何れの実施の形態に於いても、ロボット(21)からコンベヤ(1)に物品(W)を供給する場合について説明したが、コンベヤ(1)のバケット部(11)に収容された物品(W)をロボット(21)で取り出す場合に本発明を適用してもよい。即ち、バケット部(11)内の物品(W)をトラッキング動作するロボットアーム(211)で保持したときに急停止信号が発生した場合には、図1のステップ(ST25)(ST28)(ST33)(ST34)や、図4のステップ(ST25a)(ST28a)(ST33a)(ST34a)を実行する。
(1)・・・コンベヤ
(11)・・・バケット部
(21)・・・ロボット
(211)・・・ロボットアーム
(W)・・・物品
(11)・・・バケット部
(21)・・・ロボット
(211)・・・ロボットアーム
(W)・・・物品
Claims (2)
- 搬送面上に形成された物品受容部に物品を載置して搬送するコンベヤと、
前記物品受容部に対してトラッキング動作しながら該物品受容部との間で前記物品の授受を行なう物品保持機と、を具備する物品受渡装置に於いて、
前記トラッキング動作中に前記コンベヤ及び前記物品保持機を急停止させるときには、前記物品保持機の前記トラッキング動作を中断し、物品保持状態で減速可能な値として予め設定さている物品保持機の設定減速度、又は、コンベヤの設定減速度のうち、小さい方の設定減速度を用いてコンベヤ及び物品保持機を停止させる、物品受渡装置。 - 搬送面上に形成された物品受容部に物品を載置して搬送するコンベヤと、
前記物品受容部に対してトラッキング動作しながら該物品受容部との間で前記物品の授受を行なう物品保持機と、を具備する物品受渡装置に於いて、
前記トラッキング動作中に前記コンベヤ及び前記物品保持機を急停止させるときには、前記物品保持機の前記トラッキング動作を中断し、物品保持状態で減速して停止させるまでの所要時間として予め設定されている物品保持機の減速所要時間、又は、コンベヤの減速所要時間のうち、長い方の減速所要時間を用いてコンベヤ及び物品保持機を停止させる、物品受渡装置。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2005179558A JP2006347754A (ja) | 2005-06-20 | 2005-06-20 | 物品受渡装置 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2005179558A JP2006347754A (ja) | 2005-06-20 | 2005-06-20 | 物品受渡装置 |
Publications (1)
| Publication Number | Publication Date |
|---|---|
| JP2006347754A true JP2006347754A (ja) | 2006-12-28 |
Family
ID=37643991
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2005179558A Pending JP2006347754A (ja) | 2005-06-20 | 2005-06-20 | 物品受渡装置 |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP2006347754A (ja) |
Cited By (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| WO2008035720A1 (fr) | 2006-09-20 | 2008-03-27 | Kyocera Corporation | Système de communication, sa station de base, et procédé de communication |
| US8386069B2 (en) | 2008-07-08 | 2013-02-26 | Siemens Aktiengesellschaft | Method of synchronizing a pickup of a handling device, a computer readable medium and a control device |
| CN103802106A (zh) * | 2012-11-13 | 2014-05-21 | 株式会社安川电机 | 机器人系统 |
| JP2019155538A (ja) * | 2018-03-14 | 2019-09-19 | ファナック株式会社 | 協働ロボットの制御装置及び制御方法 |
| JP2020146807A (ja) * | 2019-03-14 | 2020-09-17 | 株式会社デンソーウェーブ | ロボットの制御装置、ロボットの制御方法 |
Citations (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH08129409A (ja) * | 1994-10-28 | 1996-05-21 | Yaskawa Electric Corp | ロボットの制御装置 |
| JPH08143145A (ja) * | 1994-11-22 | 1996-06-04 | Shizukou Kk | 物品の保持体への着脱方法およびその装置 |
-
2005
- 2005-06-20 JP JP2005179558A patent/JP2006347754A/ja active Pending
Patent Citations (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH08129409A (ja) * | 1994-10-28 | 1996-05-21 | Yaskawa Electric Corp | ロボットの制御装置 |
| JPH08143145A (ja) * | 1994-11-22 | 1996-06-04 | Shizukou Kk | 物品の保持体への着脱方法およびその装置 |
Cited By (10)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| WO2008035720A1 (fr) | 2006-09-20 | 2008-03-27 | Kyocera Corporation | Système de communication, sa station de base, et procédé de communication |
| US8386069B2 (en) | 2008-07-08 | 2013-02-26 | Siemens Aktiengesellschaft | Method of synchronizing a pickup of a handling device, a computer readable medium and a control device |
| EP2144127B1 (de) * | 2008-07-08 | 2014-04-30 | Siemens Aktiengesellschaft | Verfahren und Steuergerät zum Aufsynchronisieren eines Aufnehmers eines Handlingsgerätes |
| CN103802106A (zh) * | 2012-11-13 | 2014-05-21 | 株式会社安川电机 | 机器人系统 |
| JP2019155538A (ja) * | 2018-03-14 | 2019-09-19 | ファナック株式会社 | 協働ロボットの制御装置及び制御方法 |
| CN110271019A (zh) * | 2018-03-14 | 2019-09-24 | 发那科株式会社 | 协作机器人的控制装置以及控制方法 |
| CN110271019B (zh) * | 2018-03-14 | 2020-12-18 | 发那科株式会社 | 协作机器人的控制装置以及控制方法 |
| US10882188B2 (en) | 2018-03-14 | 2021-01-05 | Fanuc Corporation | Controller and control method for collaborative robot |
| JP2020146807A (ja) * | 2019-03-14 | 2020-09-17 | 株式会社デンソーウェーブ | ロボットの制御装置、ロボットの制御方法 |
| JP7305993B2 (ja) | 2019-03-14 | 2023-07-11 | 株式会社デンソーウェーブ | ロボットの制御装置、ロボットの制御方法 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| US7977908B2 (en) | Numerical controller with abnormal motor deceleration stop control means | |
| JP2006347754A (ja) | 物品受渡装置 | |
| KR102404513B1 (ko) | 물품 반송 설비 | |
| JP4979658B2 (ja) | 搬送制御システム及び搬送制御方法 | |
| JP2019507079A (ja) | 自律式コンベヤシステム | |
| KR102447060B1 (ko) | 부서지기 쉬운 물체를 운송하기 위한 운송 장치 및 운송 방법 | |
| JP2008171025A (ja) | 数値制御装置及び数値制御装置を用いた同期制御方法 | |
| EP4205919A1 (en) | Control device and control method | |
| JP2006059187A (ja) | 数値制御装置 | |
| JP2007022135A (ja) | 車両の自動制動装置 | |
| EP1217480A2 (en) | Loader control device | |
| JP6998405B2 (ja) | コンベアシステムを稼働させるコンベアシステム方法及びそのコンベアシステムにおいて用いられるフロー装置 | |
| US10723023B2 (en) | Control device and control method for controlling workpiece moving device and robot to operate in cooperation with each other | |
| US7348518B2 (en) | Welding apparatus | |
| JP6983399B2 (ja) | ワーク搬送システム | |
| JP2005066794A (ja) | ロボット制御装置 | |
| JP2020059069A (ja) | ローダ制御装置及びローダ制御方法 | |
| JP2003340659A (ja) | 組立ラインシステム | |
| CN114955617A (zh) | 用于将托盘输送至具有页张续纸器的图形工业机器的方法 | |
| JPH06238542A (ja) | 安全装置付き機械 | |
| JP2003221112A (ja) | 自動搬送装置 | |
| JPH11292263A (ja) | ワークの送り機構 | |
| JP3534202B2 (ja) | 工作機械の自動減速装置 | |
| CN115402715A (zh) | 控制系统 | |
| KR100243789B1 (ko) | 원점 복귀시 이송축 충돌 방지방법 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20080328 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20110121 |
|
| A131 | Notification of reasons for refusal |
Effective date: 20110201 Free format text: JAPANESE INTERMEDIATE CODE: A131 |
|
| A02 | Decision of refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A02 Effective date: 20110719 |