従来、カムコーダ等の撮像装置は、一般的に、ステップモータによってズームレンズやフォーカスレンズの駆動を行うレンズ駆動制御装置を有する。
レンズ駆動制御装置としては、インナーフォーカスレンズタイプのものが広く用いられている。このレンズ駆動制御装置は、任意の被写体距離にある被写体を変倍しながら撮像する場合、ズームレンズの移動に伴う焦点面の変化を補正するためのフォーカスレンズの合焦軌跡が被写体距離によって異なるため、ズームレンズ位置及びフォーカスレンズ位置を正確に制御する必要がある。
図13は、従来のインナーフォーカスレンズタイプのレンズ駆動制御装置の構成を概略的に説明する図である。
図13のレンズ駆動制御装置は、被写体側から、固定されている第1のレンズ群101と、変倍を行う第2のレンズ群(以下「ズームレンズ」という)102と、絞り103と、固定されている第3のレンズ群104と、焦点調節機能、及び変倍による焦点面の移動を補正するコンペンセータレンズ機能を兼ね備えた第4のレンズ群(以下「フォーカスレンズ」という)105と、撮像面をもつCCD106とを備える。ズームレンズ102は、ワイド(広角)側及びテレ(望遠)側間で移動可能であり、フォーカスレンズ105は至近及び無限間で移動可能である。
図13のレンズ駆動制御装置では、フォーカスレンズ105が焦点調節機能に加えてコンペンセータレンズ機能を兼ね備えているため、公知のように、ズームレンズ102の焦点距離が等しくても、CCD106上に合焦させるためのフォーカスレンズ105の位置は被写体距離によって異なる。
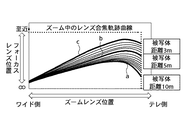
ズームレンズ102の位置とフォーカスレンズ105の位置の関係は図13に示す曲線で表わされる。図14に示す曲線は、曲線a(被写体距離10m)が無限の被写体距離に合焦する位置に対応するもので、曲線b(被写体距離5m),曲線c(被写体距離3m)は、被写体がよりCCD106の撮像面に近い場合の合焦位置に対応するものである。従って、所定の被写体距離の被写体を撮像しながら変倍を行う場合、所定の被写体距離に対応して選択された図14の曲線の軌跡に従ってフォーカスレンズ105を移動すれば合焦状態で変倍を行うことができる。
そこで、インナーフォーカスレンズを備えた撮像装置は、一般的に、図14に示す複数の軌跡情報を何らかの形(軌跡そのものでも、レンズ位置を変数とした関数でもよい)でレンズ制御用のマイクロコンピュータ(以下「マイコン」という)等に記憶させておき、ズームレンズ102の移動に対応して、その軌跡情報にしたがってフォーカスレンズ105を移動するように制御している。
次に、図13のレンズ駆動制御装置におけるステップモータの駆動方法の一例を説明する。
レンズ駆動用のモータとしてステップモータを使用すれば、歩進パルス数に対する回転角度が一定のため、レンズの初期位置を決めれば、その後は歩進パルスをそのままインクリメント又はデクリメントしてパルス数をカウントすることによりレンズ位置の検出を正確に行うことができる。従って、エンコーダを用いる必要がなく、また、レンズ駆動制御が容易である。なお、ステップモータの駆動は、ステップモータに電圧(又は電流)を印加することによって行うが、低騒音で駆動を行うために正弦波形を用いる場合が多い。
図15は、図13のレンズ駆動制御装置におけるステップモータの構成を概略的に示す図である。
図15のステップモータは、一対のモータ巻線コイル3,4及びマグネット6を有する
2相ステップモータ5と、モータ巻線コイル3に接続されたモータドライバ回路1と、モータ巻線コイル4に接続されたモータドライバ回路2と、モータドライバ回路1,2に夫々接続されたモータ制御を行うマイクロコンピュータ(マイコン)7とを備える。
マイコン7は、モータの駆動速度や停止位置を制御するためのプログラムを格納するROM、プログラムの制御命令に従って周波数とデューティ比を設定しパルス信号(E、F)を出力するPWM波形生成ユニットと、高(「H」)及び低(「L」)信号出力可能なポート(A、B)とを内蔵している。
図16は、図15におけるモータドライバ回路1,2の内部構成を概略的に示す図である。
図16のモータドライバ回路1,2は、Vcc端子とGND端子の間に夫々直列に接続された、PNPトランジスタ8,9と、ダイオード12,14と、ダイオード13,15と、NPNトランジスタ10,11とを備え、さらに、出力端がPNPトランジスタ8及びNPNトランジスタ11の各ベースに夫々抵抗16,19を介して接続され、一方の入力端が入力EN1に他方の入力端が入力IN1に接続されたANDゲート20と、出力端がPNPトランジスタ9及びNPNトランジスタ11の各ベースに夫々抵抗18,19を介して接続され、一方の入力端が入力EN1に他方の入力端がNOTゲート22を介して入力IN1に接続されたANDゲート21とを備える。
PNPトランジスタ8及びNPNトランジスタ10の接続点は出力OUT1に接続されており、PNPトランジスタ9及びNPNトランジスタ11の接続点は出力OUT2に接続されている。出力OUT1と出力OUT2はモータ巻き線コイル3を介して接続されている。
以下、図15におけるモータドライバ回路の作動をモータドライバ回路1に着目して説明する。
図16において、入力EN1が「H」レベルで入力IN1が「H」レベルのとき、トランジスタ8及び11はON状態となり、トランジスタ9及び10はOFF状態となる。従って、モータ巻線コイル13にはOUT1からOUT2の方向に電流が流れる。入力EN1が「H」レベルで入力IN1が「L」レベルのときは、トランジスタ9及びトランジスタ10がON状態となり、トランジスタ8及びトランジスタ11がOFF状態となる。従って、モータ巻線コイル3にはOUT2からOUT1の方向に電流が流れる。また、入力EN1が「L」レベルのときは入力IN1の入力レベルに関わらずPNPトランジスタ8,9、NPNトランジスタ10,11はOFF状態となり、出力OUT1,OUT2はハイインピーダンス状態となる。これらの場合の入力と出力との関係を表1に示す。
なお、モータドライバ回路2の作動も上記と同様であり、IN2、EN2、OUT3及びOUT4も表1に準ずる。
また、マイコン7からモータドライバ回路1,2に対して、パルス幅変調(PWM)出力Eが入力IN1にパルス幅変調(PWM)出力Fが入力IN2に入力される。また、入力EN1、入力EN2は、図15に示すようにマイコン出力ポートA,Bに接続して「H」,「L」を制御してもよく、マイコン7に接続せずに「H」レベルに固定してもよい。
以下、図16におけるモータ巻き線コイル3を流れる電流のパルス幅変調による制御方法を説明する。
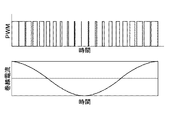
図16において、マイコン7はPWM出力E,Fを一定の周波数fpでモータドライバ回路1,2に入力する。このPWM出力E,Fの「H」,「L」により上述した論理でモータ巻線コイル3,4に電流が流れるが、周波数fpが高いためコイルのインダクタンスの影響でモータ巻線コイル3には図17に示すようなデューティ比に応じた電流が流れる。従って、振動や騒音が小さくなるように正弦波駆動を行うためには、このPWMデューティ比を略正弦波的に変化させれる。またさらに効率よくモータ駆動を行うためには、前記略正弦波の振幅を回転速度に応じて変化するようにPWMデューティ比の変化を調整する。
ズームレンズ102は、画角を変更するときだけ駆動され、また、フォーカスレンズ105は焦点を合わせるときだけ駆動される。従って、画角を決めて一定の被写体距離で被写体を撮像している場合には、ズームレンズ102もフォーカスレンズ105も駆動する必要がない。そこで、レンズを停止しているときには、モータに通電しないようにして無駄な消費電力を抑えるようにするのが一般的である。なお、レンズ停止時にモータへの通電は、図15における入力EN1,EN2を「L」レベルにすることにより禁止することができる。
ここで、ステップモータの停止位相をディテント位置だけに限定して停止させる場合にはモータに通電しなくても問題ないが、より細かい分解能の停止位相でモータを停止させる場合、ディテント位置とディテント位置の中間に停止することがある。その場合に、通電を停止した時にいずれかのディテント位置に回転する可能性がある。そこで、1−2相励磁方式のステップモータ制御において、1相励磁位置だけに限定して停止させる方法が提案されている(例えば、特許文献1参照)。
特開平10−221586号公報
図1は、本発明の実施の形態に係るレンズ駆動制御装置を備える撮像装置の内部構成を概略的に示すブロック図で示したものである。
図1において、撮像装置としてのビデオカメラは、被写体側から、第1固定レンズ群101と、変倍を行う変倍レンズ群(ズームレンズ)102と、絞り103と、第2固定レンズ群104と、焦点調節機能及び変倍による焦点面の移動を補正するコンペンセータレンズ機能を兼ね備えた合焦レンズ群(フォーカスレンズ)105と、撮影面を有し、撮影面上に結像された光学的な被写体像を光電変換して映像信号として出力する撮像素子としてのCCD106と、CCD106の出力を増幅する二重相関サンプリング(CDS)自動ゲイン制御回路(AGC)107と、AGC107からの出力信号を後述する記録装置109及びモニタ装置110に対応した信号に変換するカメラ信号処理回路108と、カメラ信号処理回路108によって変換された信号を記録する記録装置109と、カメラ信号処理回路108によって変換された信号を表示するモニタ装置110とを備える。記録装置109は、動画や静止画を記録し、記録媒体としての磁気テープや半導体メモリから成る。
図1のビデオカメラは、さらに、ズームレンズ102を駆動するズームモータ117と、ズームモータ駆動用のドライバと、絞り103を駆動するIGメータ121と、IGメータ121用のドライバ120と、AGC107で増幅された映像信号のレベルに基づいてドライバ120に絞り制御信号を送出する絞り制御回路119と、フォーカスレンズ105を駆動するフォーカスモータ118と、フォーカスモータ駆動用のドライバ116と、AGC107で増幅された映像信号から合焦のために最適な信号を取り出す範囲を設定するAFゲート111と、焦点検出に用いられる高周波成分、低周波成分及び輝度差成分(映像信号の輝度レベルの最大値と最小値の差分)を抽出するAF信号処理回路112と、ズームレンズ102及びフォーカスレンズ105の各位置を夫々検出する後述する図2のレンズ位置検出センサ122,123(実施の形態において「リセットセンサ」ともいう)と、ズームモータ駆動用ドライバ115、フォーカスモータ駆動用ドライバ116、AF信号処理回路112、カメラ信号処理回路108、記録装置109、及びレンズ位置検出センサ122,123に夫々接続されたカメラ/AFマイコン113と、カメラ/AFマイコン113に接続されたズームスイッチ114とを備える。
カメラ/AFマイコン113は、AF信号処理回路112の出力信号に基づいてフォーカスレンズを制御すると共に、ズームスイッチ114の操作情報(操作部材の回転角度に応じた電圧が出力され、この出力電圧に応じて可変速ズームがなされる)を読み込んでズーム制御を行い、また、カメラ信号処理回路108の出力信号を制御する等を行う。AFマイコン113は、AF信号処理回路112の出力信号レベルが最大となるように、フォーカスレンズ105を移動させることにより、自動焦点調節を行っている。
AFゲート11は、その大きさが可変であり、また複数設けられることもある。
絞り制御回路119は、AGC回路107の出力信号のレベルを検出し、このレベルが一定レベル(適性露光量)でないときは、一定レベルにするための絞り量制御信号をIGドライバ120に出力し、IGメータ121は、適性露光量を維持するように絞り103を駆動する。
ドライバ115,116は、夫々カメラ/AFマイコン113から出力されるズームレンズ102及びフォーカスレンズ105の駆動命令に従って駆動エネルギーを波形変更可能な電流としてズームモータ117及びフォーカスモータ118に出力する。
図2は、図1におけるレンズ位置検出センサ122の構成を概略的に示す斜視図である。
図2のレンズ位置検出センサ122は、ズームモータ117の原点位置(リセット位置)に配されたフォトセンサ130と、遮光板131とを備える。フォトセンサ130は、発光部132と受光部133とを備え、遮光板131は、ズームレンズ102又はフォーカスレンズ105に固定されていると共に、フォトセンサ130の発光部132と受光部133の間においてズームレンズ102又はフォーカスレンズ105の移動に応じて進退する。ズームレンズ102又はフォーカスレンズ105がテレ側とワイド側の間で光軸方向に移動すると、それと一体に遮光板131が移動し、フォトセンサ130の発光部132及び受光部133間の光路を遮ったとき、受光部133の出力信号は低(「L」)レベルになり、遮らないときは高(「H」)レベルになる。これにより、受光部133の出力信号が変化する位置を基準位置(ズームモータ117の原点位置)として、ズームレンズ102、フォーカスレンズ105が基準位置に存在するか否かを検知することができ、もって、AFマイコン113は、この基準位置と、レンズ移動速度、レンズ移動方向等により、各レンズの位置を認識することができる。
以上の説明は、レンズ位置検出センサ122に対するものであるが、レンズ位置検出センサ123にも適用される。
AFマイコン113には、ズームレンズ102をワイド側又はテレ側に移動させるためのズームスイッチ114が接続されている。ズームスイッチ114はその押圧に応じて電圧が変化するような回路構成になっており、AFマイコン113はズームスイッチ114が操作された時にその電圧変化を検出し、その電圧に応じて可変速ズームの何速目のズーム速度でズームレンズ102を駆動させるかを決定する。
図3は、図1におけるレンズ駆動制御装置によって実行されるレンズ制御処理の手順を示すフローチャートである。
本実施の形態では、ステップモータ制御上の最小位相単位を図18における1/8相の単位とし、停止可能位相単位を1/4相の単位とするが、最小位相単位に対して停止可能位相単位が粗い設定であれば、どのような位相単位で制御してもよい。
また、以下の説明は、ステップモータの位置カウントがワイド側からテレ側方向に増加する場合を対象としているが、テレ側からワイド側方向に増加する場合もこれに準ずる。ただし、その場合には、以下の説明において、カウンタのプラスとマイナスの符号が逆になる。
図3において、まず、電源がON状態になると(ステップS301でYES)、ステップモータをその原点位置に移動する(リセットする)ことを1で示すリセットフラグを「1」に設定し(ステップS302)、リセットモードを「1」に設定し(ステップS303)、パルスカウンタ0を1相励磁位置にしてステップモータの位相を初期化する(ステップS304)。
次いで、レンズ駆動制御装置を撮像素子としてのCCD106の画像取り込み周期に同期させて実行するために1V周期期間(垂直同期期間)待機した(ステップS305でYES)後、リセットフラグが「1」であるか否かを判別する(ステップS306)。最初は、リセットフラグが「1」であるので、リセットを行うべく、リセットモードの値が「1」か、「2」か、「3」かを判別し(ステップS307)、最初は、リセットモードが「1」であるので、後述する図4のリセットモード1処理を実行する(ステップS308)。
ステップS306の判別の結果、リセットフラグが1でないときは、後述する図8の通常動作処理を実行し(ステップS311)、次いで、電源がOFF状態であるか否かを判別し(ステップS312)、OFF状態でなければ、ステップS305以降の処理を繰り返し、電源がOFF状態であれば、本処理を終了する。
図4は、図3のステップS308で実行されるリセットモード1処理の手順を示すフローチャートである。
図4において、まず、リセットセンサ(図1におけるレンズ位置検出センサ122、以下同様)の出力が「H」であるか否かを判別する。本実施の形態では、ステップモータの位置カウントがワイド側からテレ側方向に増加する場合を想定しているので、ステップS401の判別の結果は、リセットセンサが「H」であるので、テレ側方向への駆動命令を送出し(ステップS402)、リセット動作時の駆動速度で1V期間に進むパルス数をA(最小位相単位(1/8相)の整数倍)とし、Aパルス加算した位置を目標位置(Cz←Cz+A)としてズームモータ117を駆動し(ステップS403)、ステップS404に進む。
ステップS401の判別の結果、リセットセンサの出力が「L」であるときは、ワイド側方向への駆動命令を送出し(ステップS405)、リセット動作時の駆動速度で1V期間に進むパルス数をA(最小位相単位(1/8相)の整数倍)とし、Aパルス減算した位置を目標位置(Cz←Cz−A)としてズームモータ117を駆動して(ステップS406)、ステップS404に進む。
続くステップS404では、リセットモードを「2」に設定し、その後、本処理を終了して、図3のステップS305以降の処理を実行する。この場合、ステップS307の判別の結果、リセットモードが「2」であるので、後述する図5のリセットモード2処理を実行する(ステップS309)。
図5は、図3のステップS309で実行されるリセットモード2処理の手順を示すフローチャートである。
図5において、まず、ステップモータが1V前に設定された目標位置に到達しているものとして、1V前のステップモータの駆動方向がテレ側方向か否かを判別する(ステップS501)。この場合、駆動方向がテレ側方向なので、リセットセンサの出力が「H」から「L」に切り替わっているか否かを判別する(ステップS502)。
ステップS502の判別の結果、リセットセンサの出力が「H」から「L」に切り替わっていないときは、テレ側方向への駆動命令を送出し(ステップS503)、リセット動作時の駆動速度で1V期間に進むパルス数をA(最小位相単位(1/8相)の整数倍)とし、Aパルス加算した位置を目標位置(Cz←Cz+A)としてモータを駆動して(ステップS504)、このステップS503〜S504の処理を、リセットセンサの出力が「H」から「L」に切り替わる(ステップS502でYES)まで繰り返す。
ステップS502の判別の結果、リセットセンサの出力が「H」から「L」に切り替わると(ステップモータモータの原点位置を越えると)、ワイド側方向への駆動命令を送出し(ステップS505)、最小位相単位で1パルス分(1/8相分)減算した位置を目標位置(Cz←Cz−1)としてモータを駆動して(ステップS504)、ステップS507に進む。
ステップS501の判別の結果、ステップモータの駆動方向がワイド側方向のときは、リセットセンサの出力が「L」から「H」に切り替わっているか否かを判別する(ステップS508)。
ステップS508の判別の結果、リセットセンサの出力が「L」から「H」に切り替わっていないときは、ワイド側方向への駆動命令を送出し(ステップS509)、リセット動作時の駆動速度で1V期間に進むパルス数をA(最小位相単位(1/8相)の整数倍)とし、Aパルス減算した位置を目標位置(Cz←Cz−A)としてモータを駆動して(ステップS510)、このステップS509〜S510の処理をリセットセンサの出力が「L」から「H」に切り替わる(ステップS508でYES)まで繰り返す。
ステップS508の判別の結果、リセットセンサの出力が「L」から「H」に切り替わると(ステップモータモータの原点位置を越えると)、テレ側方向への駆動命令を送出し(ステップS511)、最小位相単位で1パルス分(1/8相分)加算した位置を目標位置(Cz←Cz+1)としてモータを駆動して(ステップS512)、ステップS507に進む。
続くステップS507では、リセットモードを「3」とし、本処理を終了して、その後、図3のステップS305以降の処理を実行する。この場合、ステップS307の判別の結果、リセットモードが「3」であるので、後述する図6のリセットモード3処理を実行する。
図6は、図3のステップS310で実行されるリセットモード3処理の手順を示すフローチャートである。
図6において、まず、ステップモータが1V前に設定された目標位置に到達しているものとして、1V前のステップモータの駆動方向がテレ側方向か否かを判別する(ステップS601)。この場合、ステップモータの駆動方向がワイド側方向なので、リセットセンサの出力が「L」から「H」に切り替わっているか否かを判別する(ステップS612)。
ステップS612の判別の結果、リセットセンサの出力が「L」から「H」に切り替わっていないときは、ワイド側方向への駆動命令を送出し(ステップS613)、最小位相単位で1パルス分(1/8相分)減算した位置を目標位置(Cz←Cz−1)としてモータを駆動して(ステップS614)、ステップS613〜S614の処理をリセットセンサの出力が「L」から「H」に切り替わる(ステップS612でYES)まで繰り返す。
ステップS601の判別の結果、駆動方向がテレ側方向のときは、リセットセンサの出力が「H」から「L」に切り替わっているか否かを判別する(ステップS602)。
ステップS602の判別の結果、リセットセンサの出力が「H」から「L」に切り替わっていないときは、テレ側方向への駆動命令を送出し(ステップS603)、最小位相単位で1パルス分(1/8相分)加算した位置を目標位置(Cz←Cz+1)としてモータを駆動して(ステップS605)、このステップS604〜S605の処理をリセットセンサの出力が「H」から「L」に切り替わる(ステップS602でYES)まで繰り返す。
ステップS602の判別の結果、リセットセンサの出力が「H」から「L」に切り替わっているとき、又は、ステップS612の判別の結果、リセットセンサの出力が「L」から「H」に切り替わっているときは(ステップモータの原点位置を越えているときは)、ズーム駆動を停止し(ステップS606)、リセット位置(「H」から「L」へ、又は「L」から「H」への切換えを検出した位置)Czの位相をC0としてメモリに記憶し(ステップS607)、事前に記憶されているリセット位置カウンタをパルス値P0として書き込み(ステップS608)、ステップS607で記憶した位相C0とステップS608で書き込んだパルス値P0からステップモータの現在位置の位相を後述する算出方法により計算し(ステップS609)、後述する図7のテレ側端及びワイド側端算出処理を実行して、テレ側端及びワイド側端の位置を算出し(ステップS610)、最後に、リセットフラグを「0」に設定して(ステップS611)、本処理を終了する。
図7は、図6のステップS610で実行されるテレ側端又はワイド側端算出処理の手順を示すフローチャートである。
図7において、まず、ステップS607で記憶したリセット位置Czの位相C0に、光学テレ側端位置とリセット位置との間のパルスカウント値を正弦波1周期のパルス数(1/8相単位の場合は1周期に32パルス数)で割ったときの余りから求めた位相を加算することにより、光学テレ側端位置の位相を計算し(ステップS701)、ステップS701で計算した光学テレ側端位置の位相がステップモータの停止可能位相であるか否かを判別し(ステップS702)、停止可能位相であるときは、光学テレ側端をそのまま実際の駆動上のテレ側端位置として設定する(ステップS703)と共に、停止可能な位相位置でないときは、実際の駆動上のテレ側端位置を光学テレ側端位置から1パルス分(1/8相分)ワイド側にずらした位置として(ステップS704)、ステップS705に進む。
次いで、ステップS609で記憶したリセット位置の位相C0から、光学ワイド側端位置とリセット位置との間のパルスカウント値を光学テレ側端位置とリセット位置との間のパルスカウント値を正弦波1周期のパルス数(1/8相単位の場合は1周期に32パルス数)で割ったときの余りから求めた位相を減算することにより、光学ワイド側端位置におけるステップモータの位相を計算し(ステップS705)、ステップS705で計算した光学ワイド側端位置の位相がステップモータの停止可能な位相であるか否かを判別し(ステップS706)、停止可能位相位置であれば、光学ワイド側端をそのまま実際の駆動上のワイド側端位置として設定する(ステップS707)と共に、停止可能位相位置でないときは、実際の駆動上のワイド側端位置を光学ワイド側端位置から1パルス分(1/8相分)テレ側にずらした位置して(ステップS708)、本処理を終了する。
図7の処理によれば、光学テレ側端及びワイド側端におけるステップモータの位相が非停止位相であるときは、テレ側端及びワイド側端位置を実際の光学テレ側端及びワイド側端位置よりも内側(ステップモータの原点位置側)に設定する。
以下、リセット位置の位相とテレ側端及びワイド側端を含めた停止位置の関係を表2に示す。
スタータモータを最小位相単位(1/8相単位)で制御すると、1パルスおきに停止可能位相と非停止位相が交互に存在することになる(1/4相)。従って、リセット位置の位相は、リセットセンサの検出精度によって、停止可能位相になる場合と非停止位相になる場合がある。そして、事前に記憶されているリセット位置カウンタは、奇数である場合と偶数である場合がある。これによって、停止可能位置は次の4通りの場合が考えられる。1つ目は、リセット位置の位相が停止可能位相であり、リセット位置が偶数の場合で、停止可能位置は常にリセット位置カウンタが偶数の位置となる。2つ目は、リセット位置の位相が非停止位相であり、リセット位置が偶数の場合で、停止可能位置は常にカウンタが奇数の位置となる。3つ目は、リセット位置の位相が停止可能位相であり、リセット位置が奇数の場合で、停止可能位置は常にカウンタが奇数の位置となる。4つ目は、リセット位置の位相が非停止位相であり、リセット位置が奇数の場合で、停止可能位置は常にカウンタが偶数の位置となる。
前述した現在位置におけるステップモータの位相、及び光学テレ側端及び光学ワイド側端位置におけるステップモータの位相は、リセット位置を検出した時の位相と記憶されているリセット位置カウンタによって、表2の関係から停止位相であるか否かを判断することができる。
なお、本実施の形態では、ステップモータの最小位相単位を図18における1/8相の単位とし、停止位相を1/4相の単位とする場合で説明したが、他の位相関係による制御であっても表2で説明したことと同様な考え方で、停止位相を算出することが容易にできる。
図8及び図9は、図6のステップS311で実行される通常動作処理の手順を示すフローチャートである。
図8において、現在のレンズ位置を読み出し(ステップS801)、次いで、ズームスイッチ114が操作されているか否かによって、ズーム命令を受けている否かを判別し(ステップS802)、ズーム命令を受けているときは、ステップS803以降のズーム処理を実行し、ズーム命令を受けていないときは、ステップS816以降のフォーカス処理を実行する。
以下、図8のステップS803以降のズーム処理を説明する。
まず、モータへの通電をONにして(ステップS803)、ズームスイッチ114の操作状態に応じてモータの駆動速度を設定し(ステップS804)、ズームの操作方向がテレ側方向か否かを判別する(ステップS805)。
ステップS805の判別の結果、ズームレンズ102の駆動方向がテレ側方向のときは、ズームレンズ102の現在位置が駆動上のテレ側端位置であるか否かを判別し(ステップS806)、テレ側端位置でなければ、現在の位置に対してパルス数Bだけ大きい値であって、2V周期後には到達しているパルス数の値)を加算した位置を目標位置(Cz←Cz+B)とし(ステップS807)、目標位置Czがテレ側端位置を越えているか否かを判別し(ステップS808)、超えていれば、目標位置Czを駆動上のテレ側端位置としてリミットチェックをした(ステップS809)後、越えていなければ直ちに、ズームレンズ102の駆動方向を記憶して(ステップS8014)、ズームレンズ102の現在位置が目標位置Czになるまでズームモータ117を駆動させて(ステップS815)、本処理を終了する。
ステップS807において、ステップS804で設定した駆動速度で1V期間に進むパルス数よりも+α(1V期間に進むパルス数よりも小さいパルス数B)を加算して算出した目標位置Czの値は、最小位相単位(1/8相)ではなく、より細かな小数値であってもよい。これは、1V期間後に停止せずに連続的にズームモータ117を駆動させるためである。
ステップS805の判別の結果、ズームレンズ102の駆動方向がテレ側方向でなくワイド側方向であるときは、ズームレンズ102の現在位置が駆動上のワイド側端位置であるか否かを判別し(ステップS810)、ワイド側端位置でなければ、現在の位置から上記パルス数Bだけ大きい値であって、2V周期後には到達しているパルス数の値)を減算した位置を目標位置(Cz←Cz−B)とし(ステップS811)、目標位置Czがワイド側端位置を下回っているか否かを判別し(ステップS812)、下回っていれば、目標位置Czを駆動上のワイド側端位置としてリミットチェックをした(ステップS813)後、下回っていなければ直ちに、ズームレンズ102の駆動方向を記憶して(ステップS8014)、ズームレンズ102の現在位置が目標位置Czになるまでズームモータ117を駆動させて(ステップS815)、本処理を終了する。
ステップS806の判別の結果、ズームレンズ102の現在位置が駆動上のテレ側端位置であるとき、又はステップS810の判別の結果、ズームレンズ102の現在位置が駆動上のワイド側端位置であるときは、ズームモータ117を停止して(ステップS821)、ズームモータ117への通電をOFF状態にした(ステップS822)後、本処理を終了する。
以下、図9のステップS816以降のフォーカス処理を説明する。
まず、1V前に設定した目標位置におけるステップモータの位相が停止可能位相であるか否かを判別し、停止可能位相でないときは、ステップS814で記憶した駆動方向がテレ側方向であったか否かを判別し、テレ側方向であるときは、ステップS807で設定していた目標位置Czよりもテレ側で一番近いステップモータの停止可能位相位置を目標位置する(ステップS818)と共に、テレ側以上でなくワイド側方向であるときは、ステップS811で設定していた目標位置よりもワイド側で一番近い停止可能位相位置を目標位置として(ステップS819)、ステップS820に進む。
ステップS816の判別の結果、1V前に設定した目標位置が停止可能位相であるときは、ステップS817〜S819をスキップして、直ちにステップS820に進む。
ステップS820では、ズームレンズ102の現在位置Czが目標位置になったか否かを判別し、目標位置になっていれば、ズームモータ117を停止して(ステップS821)、ズームモータ117への通電をOFF状態にした(ステップS822)後、目標位置になっていなければ直ちに、本処理を終了する。
本実施の形態によれば、ステップモータ117のリセット位置をステップモータ117の最小位相単位で検出すると共にズームレンズ105の位置を最小位相単位で算出し、加えて、ステップモータ117のテレ側端及びワイド側端位置を最小位相単位よりも粗い位相単位でステップモータ117の停止可能位相位置又は非停止位相位置に設定するので、レンズ駆動制御を高精度に行うと共に、ズームレンズ105をテレ側端又はワイド側端におけるステップモータ117の停止可能位相位置に停止させることができ、ステップモータの通電を遮断しても、ステップモータがその停止位置において位相がずれるのを防止することができる。
上記実施の形態は、ズームレンズ102及びリセット位置検出センサ122を対象としているが、フォーカスレンズ105及びリセット位置検出センサ123も同様である。
図10は、図7のテレ側端及びワイド側端算出処理の第1の変形例の手順を示すフローチャートである。
図7の処理では、テレ側端・ワイド側端位置が実際の光学設計上のテレ側端・ワイド側端位置よりも内側に設定されるので、ズームストロークが狭くなるので、本処理では、ズームストロークを維持したままテレ側端・ワイド側端位置をシフトさせるものである。
図10の処理は、図10のステップS1001〜S1008が図7のステップS701〜S708に夫々対応しており、図7の処理と基本的に同様である。異なる点は、駆動ワイド側端の算出方法だけであり、以下、その点のみを説明する。
図10において、ステップS1006の判別の結果、ステップS1005で計算した光学ワイド側端位置におけるステップモータの位相が停止可能位相でないときは、実際の駆動上のワイド側端位置を光学ワイド側端位置から1パルス分(1/8相分)ワイド側にずらして(ステップS1008)、本処理を終了する。
図10の処理によれば、計算した光学テレ側端位置及び光学ワイド側端位置におけるステップモータの位相が夫々停止可能位相でないときは(ステップS1002及びS1006で夫々NO)、駆動テレ側端をワイド側にずらす(ステップS1004)と共に、駆動ワイド側端もワイド側にずらす(ステップS1008)ので、て、ズームレンズ102のズームストロークを維持することができる。
図11は、図7のテレ側端及びワイド側端算出処理の第2の変形例の手順を示すフローチャートである。
図11の処理では、ズームストロークを維持したままテレ側端・ワイド側端位置をシフトさせる点では、図10の処理と同様であるが、テレ側端側にメカ端余裕が広いレンズの場合には、同様にズームストロークを維持したまま、テレ側端・ワイド側端の位置をテレ方向にずらすことも可能である。
図11の処理は、図11のステップS1101〜S1108が図7のステップS701〜S708に夫々対応しており、図7の処理と基本的に同様である。異なる点は、駆動テレ側端の算出方法だけであり、以下、その点のみを説明する。
図11において、ステップS1102の判別の結果、ステップS1101で計算した光学テレ側端位置におけるステップモータの位相が停止可能位相でないときは、実際の駆動上のワイド側端位置を光学ワイド側端位置から1パルス分(1/8相分)テレ側にずらして(ステップS1104)、ステップS1105以降の処理を実行して、本処理を終了する。
図11の処理によれば、計算した光学テレ側端位置及び光学ワイド側端位置におけるステップモータの位相が夫々停止可能位相でないときは(ステップS1102及びS1206で夫々NO)、駆動テレ側端をテレ側にずらす(ステップS1204)と共に、駆動ワイド側端もテレ側にずらす(ステップS1208)ので、ズームレンズ102のズームストロークを維持つつテレ側端及びワイド側端位置をテレ側方向にずらすことができる。
図12は、図7のテレ側端及びワイド側端算出処理の第3の変形例の手順を示すフローチャートである。
図7の処理では、テレ側端・ワイド側端位置が実際の光学設計上のテレ側端・ワイド側端位置よりも内側に設定されるので、設計上のズームストロークが狭くなるが、本処理では、ズームストロークを拡大するようにテレ側端・ワイド側端位置をずらすものである。
図12の処理は、図9のステップS1201〜S1208が図7のステップS701〜S708に夫々対応しており、図7の処理と基本的に同様である。異なる点は、駆動テレ側端及び駆動ワイド側端の算出方法だけであり、以下、その点のみを説明する。
図12において、ステップS1202の判別の結果、ステップS1201で計算した光学テレ側端位置におけるステップモータの位相が停止可能位相であるときは、実際の駆動上のワイド側端位置を光学ワイド側端位置から1パルス分(1/8相分)テレ側にずらして(ステップS1204)、ステップS1205に進む。
また、ステップS1206の判別の結果、ステップS1205で計算した光学ワイド側端位置におけるステップモータの位相が停止可能位相であるときは、実際の駆動上のワイド側端位置を光学ワイド側端位置から1パルス分(1/8相分)ワイド側にずらして(ステップS1208)、本処理を終了する。
図12の処理によれば、計算した光学テレ側端位置及び光学ワイド側端位置におけるステップモータの位相が夫々停止可能位相であるときは(ステップS1202及びS1206で夫々NO)、駆動テレ側端をテレ側にずらす(ステップS1204)と共に、駆動ワイド側端をワイド側にずらす(ステップS1208)ので、ズームレンズ102のズームストロークを拡大することができ、もって実質的な駆動倍率を増加させることができる。