JP2006200751A - トリポード型等速自在継手 - Google Patents
トリポード型等速自在継手 Download PDFInfo
- Publication number
- JP2006200751A JP2006200751A JP2006113584A JP2006113584A JP2006200751A JP 2006200751 A JP2006200751 A JP 2006200751A JP 2006113584 A JP2006113584 A JP 2006113584A JP 2006113584 A JP2006113584 A JP 2006113584A JP 2006200751 A JP2006200751 A JP 2006200751A
- Authority
- JP
- Japan
- Prior art keywords
- leg shaft
- constant velocity
- universal joint
- outer ring
- velocity universal
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Granted
Links
Images









Landscapes
- Rolling Contact Bearings (AREA)
Abstract
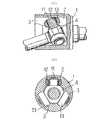
【解決手段】 外輪の内周に外輪軸方向に形成された3本のトラック溝に、トリポード部材の3本の脚軸に転動体を介して回転可能に外嵌したローラを、トラック溝の両側の外輪軸方向のローラ案内面に係合させたトリポード型等速自在継手で、脚軸5の横断面を、短軸が負荷側を向いた楕円とする。
【選択図】 図1
Description
2 トラック溝
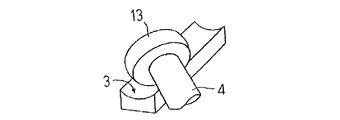
3 ローラ案内面
4 トリポード部材
5 脚軸
m1 真球面
m2 中間曲面
m3 円筒面
m4 円周面
m5 楕円面
m6 トーラス面
6 転動体
7 ローラ
n 円筒内周面
Claims (3)
- 外輪の内周に外輪軸方向に形成された3本のトラック溝に、トリポード部材の3本の脚軸に転動体を介して回転可能に外嵌したローラを、トラック溝の両側の外輪軸方向のローラ案内面に係合させたトリポード型等速自在継手において、上記脚軸の横断面を、短軸が負荷側を向いた楕円としたトリポード型等速自在継手。
- 上記脚軸の縦断面における外周面の形状を、脚軸の軸方向両端側に位置し脚軸の軸線上に中心を持つ真円の一部を構成する円弧と、前記円弧の間に位置し前記円弧と滑らかに連なった前記円弧の曲率半径よりも大きな曲率半径の曲線との組合せで形成した請求項1のトリポード型等速自在継手。
- 上記曲線を、曲率半径を無限大とした場合に相当する直線とした請求項2のトリポード型等速自在継手。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2006113584A JP4652267B2 (ja) | 2006-04-17 | 2006-04-17 | トリポード型等速自在継手 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2006113584A JP4652267B2 (ja) | 2006-04-17 | 2006-04-17 | トリポード型等速自在継手 |
Related Parent Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP34761296A Division JP3917227B2 (ja) | 1996-02-05 | 1996-12-26 | トリポード型等速自在継手 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2006200751A true JP2006200751A (ja) | 2006-08-03 |
| JP4652267B2 JP4652267B2 (ja) | 2011-03-16 |
Family
ID=36958916
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2006113584A Expired - Fee Related JP4652267B2 (ja) | 2006-04-17 | 2006-04-17 | トリポード型等速自在継手 |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP4652267B2 (ja) |
Cited By (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| KR100839545B1 (ko) | 2007-03-29 | 2008-06-19 | 자동차부품연구원 | 진동 저감용 트라이포드형 등속조인트 |
Citations (6)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPS54132046A (en) * | 1978-04-05 | 1979-10-13 | Honda Motor Co Ltd | Slide type uniform velocity universal joint |
| JPH04282029A (ja) * | 1990-11-02 | 1992-10-07 | Gkn Automot Ag | 三脚継手 |
| JPH04307116A (ja) * | 1991-01-24 | 1992-10-29 | Sobhy Labib Girguis | 同期回り継手 |
| JPH06241239A (ja) * | 1992-12-08 | 1994-08-30 | Gkn Automot Ag | 塑性加工により製造した加工物 |
| DE4408812A1 (de) * | 1993-03-24 | 1994-09-29 | Schaeffler Waelzlager Kg | Gelenklager |
| JPH07103251A (ja) * | 1993-09-15 | 1995-04-18 | Gkn Automot Ag | 等速回転継手 |
Family Cites Families (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPS63186036A (ja) * | 1986-09-17 | 1988-08-01 | Ntn Toyo Bearing Co Ltd | 等速自在継手 |
-
2006
- 2006-04-17 JP JP2006113584A patent/JP4652267B2/ja not_active Expired - Fee Related
Patent Citations (6)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPS54132046A (en) * | 1978-04-05 | 1979-10-13 | Honda Motor Co Ltd | Slide type uniform velocity universal joint |
| JPH04282029A (ja) * | 1990-11-02 | 1992-10-07 | Gkn Automot Ag | 三脚継手 |
| JPH04307116A (ja) * | 1991-01-24 | 1992-10-29 | Sobhy Labib Girguis | 同期回り継手 |
| JPH06241239A (ja) * | 1992-12-08 | 1994-08-30 | Gkn Automot Ag | 塑性加工により製造した加工物 |
| DE4408812A1 (de) * | 1993-03-24 | 1994-09-29 | Schaeffler Waelzlager Kg | Gelenklager |
| JPH07103251A (ja) * | 1993-09-15 | 1995-04-18 | Gkn Automot Ag | 等速回転継手 |
Cited By (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| KR100839545B1 (ko) | 2007-03-29 | 2008-06-19 | 자동차부품연구원 | 진동 저감용 트라이포드형 등속조인트 |
Also Published As
| Publication number | Publication date |
|---|---|
| JP4652267B2 (ja) | 2011-03-16 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| WO2011099465A1 (ja) | 摺動式トリポード型等速ジョイント | |
| JP2006162056A (ja) | 等速ジョイント | |
| JP3917227B2 (ja) | トリポード型等速自在継手 | |
| JP2005036982A (ja) | 等速継手 | |
| JP4652267B2 (ja) | トリポード型等速自在継手 | |
| JP2006112495A (ja) | 等速ジョイント | |
| JP5109515B2 (ja) | 摺動式トリポード形等速ジョイント | |
| JP2008286330A (ja) | トリポード型等速自在継手 | |
| JP2008261391A (ja) | トリポード型等速自在継手 | |
| JP2008175371A (ja) | 摺動式トリポード形等速ジョイント | |
| JP2012007644A (ja) | 摺動式トリポード型等速ジョイント | |
| JP5699716B2 (ja) | 摺動式トリポード型等速ジョイント | |
| JP2008190621A (ja) | トリポード型等速自在継手 | |
| JP4973930B2 (ja) | 摺動式トリポード形等速ジョイント | |
| JP2004353820A (ja) | トリポート型等速ジョイント部品およびトリポート型等速ジョイント | |
| JP2006258255A (ja) | トリポード型等速自在継手 | |
| JP2009014179A (ja) | トリポード型等速自在継手 | |
| JP2009250266A (ja) | トリポード型等速自在継手 | |
| JP2006275101A (ja) | トリポード型等速自在継手 | |
| JP2006138368A (ja) | 等速ジョイント | |
| JP2008164129A (ja) | 摺動式トリポード形等速ジョイント | |
| JP2008164128A (ja) | 摺動式トリポード形等速ジョイント | |
| JP2008281182A (ja) | トリポード型等速自在継手 | |
| JP2008019952A (ja) | トリポード型等速自在継手 | |
| JP2006125509A (ja) | トリポード型等速自在継手 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20090520 |
|
| A521 | Written amendment |
Effective date: 20090716 Free format text: JAPANESE INTERMEDIATE CODE: A523 |
|
| RD04 | Notification of resignation of power of attorney |
Effective date: 20091105 Free format text: JAPANESE INTERMEDIATE CODE: A7424 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20091124 |
|
| A521 | Written amendment |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20100119 |
|
| A02 | Decision of refusal |
Effective date: 20100729 Free format text: JAPANESE INTERMEDIATE CODE: A02 |
|
| A521 | Written amendment |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20101026 |
|
| A911 | Transfer of reconsideration by examiner before appeal (zenchi) |
Free format text: JAPANESE INTERMEDIATE CODE: A911 Effective date: 20101104 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20101201 |
|
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 |
|
| A61 | First payment of annual fees (during grant procedure) |
Effective date: 20101215 Free format text: JAPANESE INTERMEDIATE CODE: A61 |
|
| R150 | Certificate of patent (=grant) or registration of utility model |
Free format text: JAPANESE INTERMEDIATE CODE: R150 |
|
| FPAY | Renewal fee payment (prs date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20131224 Year of fee payment: 3 |
|
| LAPS | Cancellation because of no payment of annual fees |