JP2006187100A - 電気車両の充放電制御装置 - Google Patents
電気車両の充放電制御装置 Download PDFInfo
- Publication number
- JP2006187100A JP2006187100A JP2004377195A JP2004377195A JP2006187100A JP 2006187100 A JP2006187100 A JP 2006187100A JP 2004377195 A JP2004377195 A JP 2004377195A JP 2004377195 A JP2004377195 A JP 2004377195A JP 2006187100 A JP2006187100 A JP 2006187100A
- Authority
- JP
- Japan
- Prior art keywords
- motor generator
- speed
- rotation
- calculation cycle
- electric vehicle
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Granted
Links
Images















Classifications
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60L—PROPULSION OF ELECTRICALLY-PROPELLED VEHICLES; SUPPLYING ELECTRIC POWER FOR AUXILIARY EQUIPMENT OF ELECTRICALLY-PROPELLED VEHICLES; ELECTRODYNAMIC BRAKE SYSTEMS FOR VEHICLES IN GENERAL; MAGNETIC SUSPENSION OR LEVITATION FOR VEHICLES; MONITORING OPERATING VARIABLES OF ELECTRICALLY-PROPELLED VEHICLES; ELECTRIC SAFETY DEVICES FOR ELECTRICALLY-PROPELLED VEHICLES
- B60L1/00—Supplying electric power to auxiliary equipment of vehicles
- B60L1/003—Supplying electric power to auxiliary equipment of vehicles to auxiliary motors, e.g. for pumps, compressors
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60L—PROPULSION OF ELECTRICALLY-PROPELLED VEHICLES; SUPPLYING ELECTRIC POWER FOR AUXILIARY EQUIPMENT OF ELECTRICALLY-PROPELLED VEHICLES; ELECTRODYNAMIC BRAKE SYSTEMS FOR VEHICLES IN GENERAL; MAGNETIC SUSPENSION OR LEVITATION FOR VEHICLES; MONITORING OPERATING VARIABLES OF ELECTRICALLY-PROPELLED VEHICLES; ELECTRIC SAFETY DEVICES FOR ELECTRICALLY-PROPELLED VEHICLES
- B60L1/00—Supplying electric power to auxiliary equipment of vehicles
- B60L1/02—Supplying electric power to auxiliary equipment of vehicles to electric heating circuits
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60L—PROPULSION OF ELECTRICALLY-PROPELLED VEHICLES; SUPPLYING ELECTRIC POWER FOR AUXILIARY EQUIPMENT OF ELECTRICALLY-PROPELLED VEHICLES; ELECTRODYNAMIC BRAKE SYSTEMS FOR VEHICLES IN GENERAL; MAGNETIC SUSPENSION OR LEVITATION FOR VEHICLES; MONITORING OPERATING VARIABLES OF ELECTRICALLY-PROPELLED VEHICLES; ELECTRIC SAFETY DEVICES FOR ELECTRICALLY-PROPELLED VEHICLES
- B60L15/00—Methods, circuits, or devices for controlling the traction-motor speed of electrically-propelled vehicles
- B60L15/20—Methods, circuits, or devices for controlling the traction-motor speed of electrically-propelled vehicles for control of the vehicle or its driving motor to achieve a desired performance, e.g. speed, torque, programmed variation of speed
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60L—PROPULSION OF ELECTRICALLY-PROPELLED VEHICLES; SUPPLYING ELECTRIC POWER FOR AUXILIARY EQUIPMENT OF ELECTRICALLY-PROPELLED VEHICLES; ELECTRODYNAMIC BRAKE SYSTEMS FOR VEHICLES IN GENERAL; MAGNETIC SUSPENSION OR LEVITATION FOR VEHICLES; MONITORING OPERATING VARIABLES OF ELECTRICALLY-PROPELLED VEHICLES; ELECTRIC SAFETY DEVICES FOR ELECTRICALLY-PROPELLED VEHICLES
- B60L50/00—Electric propulsion with power supplied within the vehicle
- B60L50/10—Electric propulsion with power supplied within the vehicle using propulsion power supplied by engine-driven generators, e.g. generators driven by combustion engines
- B60L50/16—Electric propulsion with power supplied within the vehicle using propulsion power supplied by engine-driven generators, e.g. generators driven by combustion engines with provision for separate direct mechanical propulsion
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60L—PROPULSION OF ELECTRICALLY-PROPELLED VEHICLES; SUPPLYING ELECTRIC POWER FOR AUXILIARY EQUIPMENT OF ELECTRICALLY-PROPELLED VEHICLES; ELECTRODYNAMIC BRAKE SYSTEMS FOR VEHICLES IN GENERAL; MAGNETIC SUSPENSION OR LEVITATION FOR VEHICLES; MONITORING OPERATING VARIABLES OF ELECTRICALLY-PROPELLED VEHICLES; ELECTRIC SAFETY DEVICES FOR ELECTRICALLY-PROPELLED VEHICLES
- B60L50/00—Electric propulsion with power supplied within the vehicle
- B60L50/40—Electric propulsion with power supplied within the vehicle using propulsion power supplied by capacitors
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60L—PROPULSION OF ELECTRICALLY-PROPELLED VEHICLES; SUPPLYING ELECTRIC POWER FOR AUXILIARY EQUIPMENT OF ELECTRICALLY-PROPELLED VEHICLES; ELECTRODYNAMIC BRAKE SYSTEMS FOR VEHICLES IN GENERAL; MAGNETIC SUSPENSION OR LEVITATION FOR VEHICLES; MONITORING OPERATING VARIABLES OF ELECTRICALLY-PROPELLED VEHICLES; ELECTRIC SAFETY DEVICES FOR ELECTRICALLY-PROPELLED VEHICLES
- B60L50/00—Electric propulsion with power supplied within the vehicle
- B60L50/50—Electric propulsion with power supplied within the vehicle using propulsion power supplied by batteries or fuel cells
- B60L50/60—Electric propulsion with power supplied within the vehicle using propulsion power supplied by batteries or fuel cells using power supplied by batteries
- B60L50/61—Electric propulsion with power supplied within the vehicle using propulsion power supplied by batteries or fuel cells using power supplied by batteries by batteries charged by engine-driven generators, e.g. series hybrid electric vehicles
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60L—PROPULSION OF ELECTRICALLY-PROPELLED VEHICLES; SUPPLYING ELECTRIC POWER FOR AUXILIARY EQUIPMENT OF ELECTRICALLY-PROPELLED VEHICLES; ELECTRODYNAMIC BRAKE SYSTEMS FOR VEHICLES IN GENERAL; MAGNETIC SUSPENSION OR LEVITATION FOR VEHICLES; MONITORING OPERATING VARIABLES OF ELECTRICALLY-PROPELLED VEHICLES; ELECTRIC SAFETY DEVICES FOR ELECTRICALLY-PROPELLED VEHICLES
- B60L58/00—Methods or circuit arrangements for monitoring or controlling batteries or fuel cells, specially adapted for electric vehicles
- B60L58/10—Methods or circuit arrangements for monitoring or controlling batteries or fuel cells, specially adapted for electric vehicles for monitoring or controlling batteries
- B60L58/12—Methods or circuit arrangements for monitoring or controlling batteries or fuel cells, specially adapted for electric vehicles for monitoring or controlling batteries responding to state of charge [SoC]
- B60L58/14—Preventing excessive discharging
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60L—PROPULSION OF ELECTRICALLY-PROPELLED VEHICLES; SUPPLYING ELECTRIC POWER FOR AUXILIARY EQUIPMENT OF ELECTRICALLY-PROPELLED VEHICLES; ELECTRODYNAMIC BRAKE SYSTEMS FOR VEHICLES IN GENERAL; MAGNETIC SUSPENSION OR LEVITATION FOR VEHICLES; MONITORING OPERATING VARIABLES OF ELECTRICALLY-PROPELLED VEHICLES; ELECTRIC SAFETY DEVICES FOR ELECTRICALLY-PROPELLED VEHICLES
- B60L58/00—Methods or circuit arrangements for monitoring or controlling batteries or fuel cells, specially adapted for electric vehicles
- B60L58/10—Methods or circuit arrangements for monitoring or controlling batteries or fuel cells, specially adapted for electric vehicles for monitoring or controlling batteries
- B60L58/12—Methods or circuit arrangements for monitoring or controlling batteries or fuel cells, specially adapted for electric vehicles for monitoring or controlling batteries responding to state of charge [SoC]
- B60L58/15—Preventing overcharging
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60L—PROPULSION OF ELECTRICALLY-PROPELLED VEHICLES; SUPPLYING ELECTRIC POWER FOR AUXILIARY EQUIPMENT OF ELECTRICALLY-PROPELLED VEHICLES; ELECTRODYNAMIC BRAKE SYSTEMS FOR VEHICLES IN GENERAL; MAGNETIC SUSPENSION OR LEVITATION FOR VEHICLES; MONITORING OPERATING VARIABLES OF ELECTRICALLY-PROPELLED VEHICLES; ELECTRIC SAFETY DEVICES FOR ELECTRICALLY-PROPELLED VEHICLES
- B60L58/00—Methods or circuit arrangements for monitoring or controlling batteries or fuel cells, specially adapted for electric vehicles
- B60L58/40—Methods or circuit arrangements for monitoring or controlling batteries or fuel cells, specially adapted for electric vehicles for controlling a combination of batteries and fuel cells
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60L—PROPULSION OF ELECTRICALLY-PROPELLED VEHICLES; SUPPLYING ELECTRIC POWER FOR AUXILIARY EQUIPMENT OF ELECTRICALLY-PROPELLED VEHICLES; ELECTRODYNAMIC BRAKE SYSTEMS FOR VEHICLES IN GENERAL; MAGNETIC SUSPENSION OR LEVITATION FOR VEHICLES; MONITORING OPERATING VARIABLES OF ELECTRICALLY-PROPELLED VEHICLES; ELECTRIC SAFETY DEVICES FOR ELECTRICALLY-PROPELLED VEHICLES
- B60L7/00—Electrodynamic brake systems for vehicles in general
- B60L7/10—Dynamic electric regenerative braking
- B60L7/14—Dynamic electric regenerative braking for vehicles propelled by ac motors
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60L—PROPULSION OF ELECTRICALLY-PROPELLED VEHICLES; SUPPLYING ELECTRIC POWER FOR AUXILIARY EQUIPMENT OF ELECTRICALLY-PROPELLED VEHICLES; ELECTRODYNAMIC BRAKE SYSTEMS FOR VEHICLES IN GENERAL; MAGNETIC SUSPENSION OR LEVITATION FOR VEHICLES; MONITORING OPERATING VARIABLES OF ELECTRICALLY-PROPELLED VEHICLES; ELECTRIC SAFETY DEVICES FOR ELECTRICALLY-PROPELLED VEHICLES
- B60L7/00—Electrodynamic brake systems for vehicles in general
- B60L7/22—Dynamic electric resistor braking, combined with dynamic electric regenerative braking
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60L—PROPULSION OF ELECTRICALLY-PROPELLED VEHICLES; SUPPLYING ELECTRIC POWER FOR AUXILIARY EQUIPMENT OF ELECTRICALLY-PROPELLED VEHICLES; ELECTRODYNAMIC BRAKE SYSTEMS FOR VEHICLES IN GENERAL; MAGNETIC SUSPENSION OR LEVITATION FOR VEHICLES; MONITORING OPERATING VARIABLES OF ELECTRICALLY-PROPELLED VEHICLES; ELECTRIC SAFETY DEVICES FOR ELECTRICALLY-PROPELLED VEHICLES
- B60L2210/00—Converter types
- B60L2210/40—DC to AC converters
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60L—PROPULSION OF ELECTRICALLY-PROPELLED VEHICLES; SUPPLYING ELECTRIC POWER FOR AUXILIARY EQUIPMENT OF ELECTRICALLY-PROPELLED VEHICLES; ELECTRODYNAMIC BRAKE SYSTEMS FOR VEHICLES IN GENERAL; MAGNETIC SUSPENSION OR LEVITATION FOR VEHICLES; MONITORING OPERATING VARIABLES OF ELECTRICALLY-PROPELLED VEHICLES; ELECTRIC SAFETY DEVICES FOR ELECTRICALLY-PROPELLED VEHICLES
- B60L2220/00—Electrical machine types; Structures or applications thereof
- B60L2220/10—Electrical machine types
- B60L2220/14—Synchronous machines
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60L—PROPULSION OF ELECTRICALLY-PROPELLED VEHICLES; SUPPLYING ELECTRIC POWER FOR AUXILIARY EQUIPMENT OF ELECTRICALLY-PROPELLED VEHICLES; ELECTRODYNAMIC BRAKE SYSTEMS FOR VEHICLES IN GENERAL; MAGNETIC SUSPENSION OR LEVITATION FOR VEHICLES; MONITORING OPERATING VARIABLES OF ELECTRICALLY-PROPELLED VEHICLES; ELECTRIC SAFETY DEVICES FOR ELECTRICALLY-PROPELLED VEHICLES
- B60L2240/00—Control parameters of input or output; Target parameters
- B60L2240/10—Vehicle control parameters
- B60L2240/12—Speed
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60L—PROPULSION OF ELECTRICALLY-PROPELLED VEHICLES; SUPPLYING ELECTRIC POWER FOR AUXILIARY EQUIPMENT OF ELECTRICALLY-PROPELLED VEHICLES; ELECTRODYNAMIC BRAKE SYSTEMS FOR VEHICLES IN GENERAL; MAGNETIC SUSPENSION OR LEVITATION FOR VEHICLES; MONITORING OPERATING VARIABLES OF ELECTRICALLY-PROPELLED VEHICLES; ELECTRIC SAFETY DEVICES FOR ELECTRICALLY-PROPELLED VEHICLES
- B60L2240/00—Control parameters of input or output; Target parameters
- B60L2240/10—Vehicle control parameters
- B60L2240/14—Acceleration
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60L—PROPULSION OF ELECTRICALLY-PROPELLED VEHICLES; SUPPLYING ELECTRIC POWER FOR AUXILIARY EQUIPMENT OF ELECTRICALLY-PROPELLED VEHICLES; ELECTRODYNAMIC BRAKE SYSTEMS FOR VEHICLES IN GENERAL; MAGNETIC SUSPENSION OR LEVITATION FOR VEHICLES; MONITORING OPERATING VARIABLES OF ELECTRICALLY-PROPELLED VEHICLES; ELECTRIC SAFETY DEVICES FOR ELECTRICALLY-PROPELLED VEHICLES
- B60L2240/00—Control parameters of input or output; Target parameters
- B60L2240/10—Vehicle control parameters
- B60L2240/34—Cabin temperature
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60L—PROPULSION OF ELECTRICALLY-PROPELLED VEHICLES; SUPPLYING ELECTRIC POWER FOR AUXILIARY EQUIPMENT OF ELECTRICALLY-PROPELLED VEHICLES; ELECTRODYNAMIC BRAKE SYSTEMS FOR VEHICLES IN GENERAL; MAGNETIC SUSPENSION OR LEVITATION FOR VEHICLES; MONITORING OPERATING VARIABLES OF ELECTRICALLY-PROPELLED VEHICLES; ELECTRIC SAFETY DEVICES FOR ELECTRICALLY-PROPELLED VEHICLES
- B60L2240/00—Control parameters of input or output; Target parameters
- B60L2240/10—Vehicle control parameters
- B60L2240/36—Temperature of vehicle components or parts
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60L—PROPULSION OF ELECTRICALLY-PROPELLED VEHICLES; SUPPLYING ELECTRIC POWER FOR AUXILIARY EQUIPMENT OF ELECTRICALLY-PROPELLED VEHICLES; ELECTRODYNAMIC BRAKE SYSTEMS FOR VEHICLES IN GENERAL; MAGNETIC SUSPENSION OR LEVITATION FOR VEHICLES; MONITORING OPERATING VARIABLES OF ELECTRICALLY-PROPELLED VEHICLES; ELECTRIC SAFETY DEVICES FOR ELECTRICALLY-PROPELLED VEHICLES
- B60L2240/00—Control parameters of input or output; Target parameters
- B60L2240/40—Drive Train control parameters
- B60L2240/42—Drive Train control parameters related to electric machines
- B60L2240/421—Speed
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60L—PROPULSION OF ELECTRICALLY-PROPELLED VEHICLES; SUPPLYING ELECTRIC POWER FOR AUXILIARY EQUIPMENT OF ELECTRICALLY-PROPELLED VEHICLES; ELECTRODYNAMIC BRAKE SYSTEMS FOR VEHICLES IN GENERAL; MAGNETIC SUSPENSION OR LEVITATION FOR VEHICLES; MONITORING OPERATING VARIABLES OF ELECTRICALLY-PROPELLED VEHICLES; ELECTRIC SAFETY DEVICES FOR ELECTRICALLY-PROPELLED VEHICLES
- B60L2240/00—Control parameters of input or output; Target parameters
- B60L2240/40—Drive Train control parameters
- B60L2240/42—Drive Train control parameters related to electric machines
- B60L2240/423—Torque
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60L—PROPULSION OF ELECTRICALLY-PROPELLED VEHICLES; SUPPLYING ELECTRIC POWER FOR AUXILIARY EQUIPMENT OF ELECTRICALLY-PROPELLED VEHICLES; ELECTRODYNAMIC BRAKE SYSTEMS FOR VEHICLES IN GENERAL; MAGNETIC SUSPENSION OR LEVITATION FOR VEHICLES; MONITORING OPERATING VARIABLES OF ELECTRICALLY-PROPELLED VEHICLES; ELECTRIC SAFETY DEVICES FOR ELECTRICALLY-PROPELLED VEHICLES
- B60L2240/00—Control parameters of input or output; Target parameters
- B60L2240/40—Drive Train control parameters
- B60L2240/42—Drive Train control parameters related to electric machines
- B60L2240/427—Voltage
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60L—PROPULSION OF ELECTRICALLY-PROPELLED VEHICLES; SUPPLYING ELECTRIC POWER FOR AUXILIARY EQUIPMENT OF ELECTRICALLY-PROPELLED VEHICLES; ELECTRODYNAMIC BRAKE SYSTEMS FOR VEHICLES IN GENERAL; MAGNETIC SUSPENSION OR LEVITATION FOR VEHICLES; MONITORING OPERATING VARIABLES OF ELECTRICALLY-PROPELLED VEHICLES; ELECTRIC SAFETY DEVICES FOR ELECTRICALLY-PROPELLED VEHICLES
- B60L2240/00—Control parameters of input or output; Target parameters
- B60L2240/40—Drive Train control parameters
- B60L2240/42—Drive Train control parameters related to electric machines
- B60L2240/429—Current
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60L—PROPULSION OF ELECTRICALLY-PROPELLED VEHICLES; SUPPLYING ELECTRIC POWER FOR AUXILIARY EQUIPMENT OF ELECTRICALLY-PROPELLED VEHICLES; ELECTRODYNAMIC BRAKE SYSTEMS FOR VEHICLES IN GENERAL; MAGNETIC SUSPENSION OR LEVITATION FOR VEHICLES; MONITORING OPERATING VARIABLES OF ELECTRICALLY-PROPELLED VEHICLES; ELECTRIC SAFETY DEVICES FOR ELECTRICALLY-PROPELLED VEHICLES
- B60L2240/00—Control parameters of input or output; Target parameters
- B60L2240/40—Drive Train control parameters
- B60L2240/44—Drive Train control parameters related to combustion engines
- B60L2240/441—Speed
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60L—PROPULSION OF ELECTRICALLY-PROPELLED VEHICLES; SUPPLYING ELECTRIC POWER FOR AUXILIARY EQUIPMENT OF ELECTRICALLY-PROPELLED VEHICLES; ELECTRODYNAMIC BRAKE SYSTEMS FOR VEHICLES IN GENERAL; MAGNETIC SUSPENSION OR LEVITATION FOR VEHICLES; MONITORING OPERATING VARIABLES OF ELECTRICALLY-PROPELLED VEHICLES; ELECTRIC SAFETY DEVICES FOR ELECTRICALLY-PROPELLED VEHICLES
- B60L2240/00—Control parameters of input or output; Target parameters
- B60L2240/40—Drive Train control parameters
- B60L2240/44—Drive Train control parameters related to combustion engines
- B60L2240/443—Torque
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60L—PROPULSION OF ELECTRICALLY-PROPELLED VEHICLES; SUPPLYING ELECTRIC POWER FOR AUXILIARY EQUIPMENT OF ELECTRICALLY-PROPELLED VEHICLES; ELECTRODYNAMIC BRAKE SYSTEMS FOR VEHICLES IN GENERAL; MAGNETIC SUSPENSION OR LEVITATION FOR VEHICLES; MONITORING OPERATING VARIABLES OF ELECTRICALLY-PROPELLED VEHICLES; ELECTRIC SAFETY DEVICES FOR ELECTRICALLY-PROPELLED VEHICLES
- B60L2240/00—Control parameters of input or output; Target parameters
- B60L2240/40—Drive Train control parameters
- B60L2240/48—Drive Train control parameters related to transmissions
- B60L2240/486—Operating parameters
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60L—PROPULSION OF ELECTRICALLY-PROPELLED VEHICLES; SUPPLYING ELECTRIC POWER FOR AUXILIARY EQUIPMENT OF ELECTRICALLY-PROPELLED VEHICLES; ELECTRODYNAMIC BRAKE SYSTEMS FOR VEHICLES IN GENERAL; MAGNETIC SUSPENSION OR LEVITATION FOR VEHICLES; MONITORING OPERATING VARIABLES OF ELECTRICALLY-PROPELLED VEHICLES; ELECTRIC SAFETY DEVICES FOR ELECTRICALLY-PROPELLED VEHICLES
- B60L2240/00—Control parameters of input or output; Target parameters
- B60L2240/40—Drive Train control parameters
- B60L2240/54—Drive Train control parameters related to batteries
- B60L2240/547—Voltage
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60L—PROPULSION OF ELECTRICALLY-PROPELLED VEHICLES; SUPPLYING ELECTRIC POWER FOR AUXILIARY EQUIPMENT OF ELECTRICALLY-PROPELLED VEHICLES; ELECTRODYNAMIC BRAKE SYSTEMS FOR VEHICLES IN GENERAL; MAGNETIC SUSPENSION OR LEVITATION FOR VEHICLES; MONITORING OPERATING VARIABLES OF ELECTRICALLY-PROPELLED VEHICLES; ELECTRIC SAFETY DEVICES FOR ELECTRICALLY-PROPELLED VEHICLES
- B60L2240/00—Control parameters of input or output; Target parameters
- B60L2240/40—Drive Train control parameters
- B60L2240/54—Drive Train control parameters related to batteries
- B60L2240/549—Current
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60L—PROPULSION OF ELECTRICALLY-PROPELLED VEHICLES; SUPPLYING ELECTRIC POWER FOR AUXILIARY EQUIPMENT OF ELECTRICALLY-PROPELLED VEHICLES; ELECTRODYNAMIC BRAKE SYSTEMS FOR VEHICLES IN GENERAL; MAGNETIC SUSPENSION OR LEVITATION FOR VEHICLES; MONITORING OPERATING VARIABLES OF ELECTRICALLY-PROPELLED VEHICLES; ELECTRIC SAFETY DEVICES FOR ELECTRICALLY-PROPELLED VEHICLES
- B60L2250/00—Driver interactions
- B60L2250/26—Driver interactions by pedal actuation
- B60L2250/28—Accelerator pedal thresholds
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60L—PROPULSION OF ELECTRICALLY-PROPELLED VEHICLES; SUPPLYING ELECTRIC POWER FOR AUXILIARY EQUIPMENT OF ELECTRICALLY-PROPELLED VEHICLES; ELECTRODYNAMIC BRAKE SYSTEMS FOR VEHICLES IN GENERAL; MAGNETIC SUSPENSION OR LEVITATION FOR VEHICLES; MONITORING OPERATING VARIABLES OF ELECTRICALLY-PROPELLED VEHICLES; ELECTRIC SAFETY DEVICES FOR ELECTRICALLY-PROPELLED VEHICLES
- B60L2260/00—Operating Modes
- B60L2260/40—Control modes
- B60L2260/44—Control modes by parameter estimation
-
- Y—GENERAL TAGGING OF NEW TECHNOLOGICAL DEVELOPMENTS; GENERAL TAGGING OF CROSS-SECTIONAL TECHNOLOGIES SPANNING OVER SEVERAL SECTIONS OF THE IPC; TECHNICAL SUBJECTS COVERED BY FORMER USPC CROSS-REFERENCE ART COLLECTIONS [XRACs] AND DIGESTS
- Y02—TECHNOLOGIES OR APPLICATIONS FOR MITIGATION OR ADAPTATION AGAINST CLIMATE CHANGE
- Y02T—CLIMATE CHANGE MITIGATION TECHNOLOGIES RELATED TO TRANSPORTATION
- Y02T10/00—Road transport of goods or passengers
- Y02T10/60—Other road transportation technologies with climate change mitigation effect
- Y02T10/62—Hybrid vehicles
-
- Y—GENERAL TAGGING OF NEW TECHNOLOGICAL DEVELOPMENTS; GENERAL TAGGING OF CROSS-SECTIONAL TECHNOLOGIES SPANNING OVER SEVERAL SECTIONS OF THE IPC; TECHNICAL SUBJECTS COVERED BY FORMER USPC CROSS-REFERENCE ART COLLECTIONS [XRACs] AND DIGESTS
- Y02—TECHNOLOGIES OR APPLICATIONS FOR MITIGATION OR ADAPTATION AGAINST CLIMATE CHANGE
- Y02T—CLIMATE CHANGE MITIGATION TECHNOLOGIES RELATED TO TRANSPORTATION
- Y02T10/00—Road transport of goods or passengers
- Y02T10/60—Other road transportation technologies with climate change mitigation effect
- Y02T10/64—Electric machine technologies in electromobility
-
- Y—GENERAL TAGGING OF NEW TECHNOLOGICAL DEVELOPMENTS; GENERAL TAGGING OF CROSS-SECTIONAL TECHNOLOGIES SPANNING OVER SEVERAL SECTIONS OF THE IPC; TECHNICAL SUBJECTS COVERED BY FORMER USPC CROSS-REFERENCE ART COLLECTIONS [XRACs] AND DIGESTS
- Y02—TECHNOLOGIES OR APPLICATIONS FOR MITIGATION OR ADAPTATION AGAINST CLIMATE CHANGE
- Y02T—CLIMATE CHANGE MITIGATION TECHNOLOGIES RELATED TO TRANSPORTATION
- Y02T10/00—Road transport of goods or passengers
- Y02T10/60—Other road transportation technologies with climate change mitigation effect
- Y02T10/70—Energy storage systems for electromobility, e.g. batteries
-
- Y—GENERAL TAGGING OF NEW TECHNOLOGICAL DEVELOPMENTS; GENERAL TAGGING OF CROSS-SECTIONAL TECHNOLOGIES SPANNING OVER SEVERAL SECTIONS OF THE IPC; TECHNICAL SUBJECTS COVERED BY FORMER USPC CROSS-REFERENCE ART COLLECTIONS [XRACs] AND DIGESTS
- Y02—TECHNOLOGIES OR APPLICATIONS FOR MITIGATION OR ADAPTATION AGAINST CLIMATE CHANGE
- Y02T—CLIMATE CHANGE MITIGATION TECHNOLOGIES RELATED TO TRANSPORTATION
- Y02T10/00—Road transport of goods or passengers
- Y02T10/60—Other road transportation technologies with climate change mitigation effect
- Y02T10/7072—Electromobility specific charging systems or methods for batteries, ultracapacitors, supercapacitors or double-layer capacitors
-
- Y—GENERAL TAGGING OF NEW TECHNOLOGICAL DEVELOPMENTS; GENERAL TAGGING OF CROSS-SECTIONAL TECHNOLOGIES SPANNING OVER SEVERAL SECTIONS OF THE IPC; TECHNICAL SUBJECTS COVERED BY FORMER USPC CROSS-REFERENCE ART COLLECTIONS [XRACs] AND DIGESTS
- Y02—TECHNOLOGIES OR APPLICATIONS FOR MITIGATION OR ADAPTATION AGAINST CLIMATE CHANGE
- Y02T—CLIMATE CHANGE MITIGATION TECHNOLOGIES RELATED TO TRANSPORTATION
- Y02T10/00—Road transport of goods or passengers
- Y02T10/60—Other road transportation technologies with climate change mitigation effect
- Y02T10/72—Electric energy management in electromobility
Landscapes
- Engineering & Computer Science (AREA)
- Power Engineering (AREA)
- Transportation (AREA)
- Mechanical Engineering (AREA)
- Life Sciences & Earth Sciences (AREA)
- Sustainable Development (AREA)
- Sustainable Energy (AREA)
- Electric Propulsion And Braking For Vehicles (AREA)
- Hybrid Electric Vehicles (AREA)
Abstract
【解決手段】 動力源として少なくとも1つのモータジェネレータを有し、該モータジェネレータへのトルク指令値を演算するモータジェネレータトルク演算手段を備えたハイブリッド車において、前記モータジェネレータの現演算周期における回転数を検出するモータジェネレータ回転数検出手段(ステップS401)と、前記モータジェネレータの一演算周期後における回転数を予測するモータジェネレータ回転数予測手段(ステップS403)と、を設け、前記モータジェネレータトルク演算手段(ステップS404、ステップS405)は、現演算周期と一演算周期後のモータジェネレータ回転数のどちらにおいても、バッテリの充放電電力がバッテリ劣化を防止する制限値以下となるように、モータジェネレータへのトルク指令値を演算する手段とした。
【選択図】 図12
Description
前記モータジェネレータの現演算周期における回転数を検出するモータジェネレータ回転数検出手段と、
前記モータジェネレータの一演算周期後における回転数を予測するモータジェネレータ回転数予測手段と、を設け、
前記モータジェネレータトルク演算手段は、現演算周期と一演算周期後のモータジェネレータ回転数のどちらにおいても、バッテリの充放電電力がバッテリ劣化を防止する制限値以下となるように、モータジェネレータへのトルク指令値を演算することを特徴とする。
図1は実施例1の充放電制御装置が適用されたハイブリッド車の駆動系を示す全体システム図である。実施例1のハイブリッド車の駆動系は、図1に示すように、エンジンEと、第1モータジェネレータMG1(モータ)と、第2モータジェネレータMG2(モータ)と、出力軸OUTと、これらの入出力要素E,MG1,MG2,OUTが連結される差動装置(第1遊星歯車PG1、第2遊星歯車PG2、第3遊星歯車PG3)を有する駆動力合成変速機と、を備えている。
前記第1回転メンバM1(S1,S2)には、第2モータジェネレータMG2が連結されている。
前記第2回転メンバM2(R1,R3)には、入出力要素の何れにも連結されていない。
前記第3回転メンバM3(PC2,R3)には、エンジンクラッチECを介してエンジンEが連結されている。また、エンジンクラッチEC及びシリーズクラッチSCを介して第1モータジェネレータMG1が連結されている。つまり、前記エンジンEと第1モータジェネレータMG1とは、シリーズクラッチSCを介して連結されている。
前記第1ピニオンキャリアPC1には、ハイクラッチHCを介して第2モータジェネレータMG2が連結されている。また、ローブレーキLBを介して変速機ケースTCに連結されている。
前記第2リングギヤR2には、モータジェネレータクラッチMGCを介して第1モータジェネレータMG1が連結されている。また、ハイローブレーキHLBを介して変速機ケースTCに連結されている。
前記第3ピニオンキャリアPC3には、出力軸OUTが連結されている。なお、出力軸OUTからは、図外のプロペラシャフトやディファレンシャルやドライブシャフトを介して左右の駆動輪に駆動力が伝達される。
実施例1におけるハイブリッド車の制御系は、図1に示すように、エンジンコントローラ1と、モータコントローラ2と、インバータ3と、バッテリ4と、油圧制御装置5と、統合コントローラ6と、アクセル開度センサ7と、車速センサ8と、エンジン回転数センサ9と、第1モータジェネレータ回転数センサ10と、第2モータジェネレータ回転数センサ11と、第3リングギヤ回転数センサ12と、第2リングギヤ回転数センサ13と、を有して構成されている。
走行モードとしては、ローギヤ固定変速比モード(以下、「Lowモード」という。)と、ロー側無段変速比モード(以下、「Low-iVTモード」という。)と、2速固定変速比モード(以下、「2ndモード」という。)と、ハイ側無段変速比モード(以下、「High-iVTモード」という。)と、ハイギヤ固定変速比モード(以下、「Highモード」という。)と、の5つの走行モードを有する。
ここで、図2(a)は「EV-Lowモード」の共線図、図2(b)は「EV-Low-iVTモード」の共線図、図2(c)は「EV-2ndモード」の共線図、図2(d)は「EV-High-iVTモード」の共線図、図2(e)は「EV-Highモード」の共線図である。また、図3(a)は「HEV-Lowモード」の共線図、図3(b)は「HEV-Low-iVTモード」の共線図、図3(c)は「HEV-2ndモード」の共線図、図3(d)は「HEV-High-iVTモード」の共線図、図3(e)は「HEV-Highモード」の共線図である。
[ハイブリッド車での充放電制御の従来例]
ハイブリッド車では、バッテリの充放電電力が所定の制限値を越えた過充放電状態になると、バッテリが劣化してしまう。そこで、従来技術では、モータジェネレータの回転数やバッテリの制限電力に応じて、バッテリが過充放電しないように、モータジェネレータトルクを設定する。
T1=k1F+k2Te …(1)
ここで、Fは目標駆動力、Teはエンジントルク、k1,k2は制御ゲインである。この制御則を用いて第1モータジェネレータトルクT1を決定し、ステップS303へ進む。
P(t)=T1×N1(t)+P1 …(2)
ここで、P1はエアコン等の補機損失分である。このバッテリ充放電電力P(t)がバッテリ制限電力Pbmaxよりも大きい場合には、ステップS304へ進む。また、バッテリ充放電電力P(t)がバッテリ制限電力Pbmax以下の場合は、バッテリ制限電力Pbmaxを超過しないので、第1モータジェネレータトルクT1の制限を行わない。
ΔP(t)=P(t)−Pbmax …(3)
となる。この超過電力ΔP(t)に相当する、第1モータジェネレータトルクΔT1(t)は、
ΔT1(t)=ΔP(t)/N1 …(4)
となる。次式に示すように、ΔT1(t)を第1モータジェネレータトルクT1から減じることで、第1モータジェネレータトルクT1'を算出することができることになる。
T1'=T1−ΔT1(t) …(5)
すなわち、第1モータジェネレータから出力するトルクを、この第1モータジェネレータトルクT1'に制限することで、現演算時においてバッテリ充放電電力Pが、バッテリ制限電力Pbmaxを超過することがない。
P(t)=T1'(t)×N1(t)+P1=Pbmax …(6)
ここで、N1(t)は現時刻での第1モータジェネレータ回転数、T1'(t)は従来制御による制限後の第1モータジェネレータトルクである。
P(t+a)=T1'(t)×N1(t+a)+P1 …(7)
ここで、N1(t+a)は、時刻t+aでの第1モータジェネレータ回転数である。また、第1モータジェネレータトルクは、一演算周期後の制御タイミングt+1まで更新されないため、時刻t+aにおいても第1モータジェネレータトルクはT1'(t)である。
N1(t+a)>N1(t) …(8)
なので、
P(t+a)>Pbmax …(9)
となり、演算周期間において、バッテリ制限電力Pbmaxを超過してしまう。
T1=k11ui+k12F+k13Te
T2=k21ui+k22F+k23Te …(10)
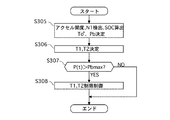
ここで、k11,k12,k13,k21,k22,k23は制御ゲインである。ここで、変速操作量uiは、目標変速比を達成するように、変速機入力軸目標回転数Ni*と変速機入力軸実回転数Niとの偏差からPI制御器を用いて演算する。この式に従い、第1モータジェネレータトルクT1と第2モータジェネレータトルクT2を決定し、ステップS307へ進む。
P(t)=T1×N1(t)+T2×N2(t)+P1 …(11)
バッテリ制限電力Pbmaxをバッテリ充放電電力P(t)が超過しないときには、第1モータジェネレータトルクT1と第2モータジェネレータトルクT2との関係は、次式のように示される。
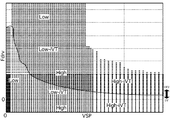
Pbmax≧P(t) …(12)
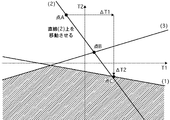
この式(12)に示される領域は、図10において直線(1)で切り分けられた斜線領域である。図10の横軸は第1モータジェネレータトルクT1、縦軸は第2モータジェネレータトルクT2である。そして、バッテリ充放電電力P(t)がバッテリ制限電力Pbmaxよりも大きい場合には、ステップS308へ進む。また、バッテリ充放電電力P(t)がバッテリ制限電力Pbmax以下の場合は、バッテリ制限電力Pbmaxを超過しないので、両モータジェネレータトルクT1,T2の制限を行わない。
ここでは、両モータジェネレータトルクT1,T2を、変速操作量uiを維持する方法で制限する。変速操作量uiとT1,T2,Teの関係は、式(10)から目標駆動力Fを消去することで導出することができ、次式のように示される。
K5T1+k6T2+k7Te=ui …(13)
ここで、k5,k6,k7は制御ゲインである。変速操作量uiを変えずに、バッテリ充放電電力を超過電力ΔP(t)減らすような補正第1モータジェネレータトルクΔT1と補正第2モータジェネレータトルクΔT2は次式に示される。
K5ΔT1+k6ΔT2=0
N1(t)ΔT1+N2(t)ΔT2=ΔP(t) …(14)
この補正第1モータジェネレータトルクΔT1と補正第2モータジェネレータトルクΔT2とを用いて、制限後第1モータジェネレータトルクT1'と制限後第2モータジェネレータトルクT2'は、次式により算出される。
T1'=T1−ΔT1 …(15)
T2'=T2−ΔT2 …(16)
まず、図10中の点Aは式(10)により決定されたモータジェネレータトルク(T1,T2)であり、直線(2)は式(13)を表す直線である。次に、この点A(T1,T2)を直線(2)に沿って、つまり、変速操作量uiを維持し、図10の点B(T1',T2')に移動させる。点Bは、バッテリ充放電電力P(t)がバッテリ制限電力Pbmaxを超過しない斜線領域にある。
以上により、制限前の変速速度を維持したままで、バッテリ充放電電力P(t)がバッテリ制限電力Pbmaxを超過しない制限後第1モータジェネレータトルクT1'と制限後第2モータジェネレータトルクT2'を算出できる。
P(t)=T1'(t)×N1(t)+T2'(t)×N2(t)+P1=Pbmax …(17)
ここで、N1(t),N2(t)はそれぞれ現時刻での第1,第2モータジェネレータ回転数、T1'(t),T2'(t)はそれぞれ従来制御による制限後の第1,第2モータジェネレータトルクである。
P(t+a)=T1'(t)×N1(t+a)+T2'(t)×N2(t+a)+P1 …(18)
ここで、N1(t+a),N2(t+a)は、時刻t+aでの第1,第2モータジェネレータ回転数である。また、第1モータジェネレータトルクと第2モータジェネレータトルクは、一演算周期後の制御タイミングt+1まで更新されないため、時刻t+aにおいても両モータジェネレータトルクはT1'(t),T2'(t)である。
N1(t+a)>N1(t)、N2(t+a)>N2(t) …(19)
なので、
P(t+a)>Pbmax …(20)
となり、演算周期間において、バッテリ制限電力Pbmaxを超過してしまう。
[実施例1での充放電制御作用]
実施例1では、「HEV-2ndモード」を例にし、図12に示すフローチャートを用いて説明する(モータジェネレータトルク演算手段)。なお、図12に示す制御は、マイコンを用いて所定の演算周期(例えば、10msec)毎に繰り返し実行される。
ここで、モータジェネレータ回転数予測手段であるステップS403は、第1モータジェネレータMG1の回転変化率を推定する回転変化率推定部と、推定された回転変化率から一演算周期後の第1モータジェネレータ回転数N1e(t+1)を推定するモータジェネレータ回転数推定部と、を有する。そして、前記回転変化率推定部は、一演算周期前の第1モータジェネレータ回転数N1(t-1)と現演算周期の第1モータジェネレータ回転数N1(t)との回転数差に基づき、第1モータジェネレータMG1の回転変化率を推定する。
つまり、一演算周期後の第1モータジェネレータ回転数N1e(t+1)は、現演算周期の第1モータジェネレータ回転数N1(t)と一演算周期前の第1モータジェネレータ回転数N1(t-1)との回転差から、
N1e(t+1)=N1(t)+{N1(t)−N1(t-1)} …(21)
を用いて推定し、ステップS404へ進む。
まず、バッテリ充放電電力P(t)は、上記式(2)を用いて算出する。
また、一演算周期後のバッテリ充放電電力P(t+1)は、一演算周期後の第1モータジェネレータ回転数N1e(t+1)を用いて次式から演算される。
P(t+1)=T1×N1e(t+1)+P1 …(22)
このバッテリ充放電電力P(t)とP(t+1)の両方が、バッテリ制限電力Pbmax以下の場合は、バッテリ制限電力Pbmaxを超過しないので、第1モータジェネレータトルクT1の制限を行わない。それ以外の場合には、ステップS405へ進む。
また、超過電力ΔP(t)は、バッテリ充放電電力P(t)のバッテリ制限電力Pbmaxに対する超過電力であるとすると、
ΔPe(t+1)=Pe(t+1)−Pbmax …(23)
となる。この超過電力ΔP(t+1)に相当する、第1モータジェネレータトルクΔT1(t+1)は、
ΔT1(t+1)={ΔPe(t+1)}/{Ne1(t+1)} …(24)
となる。
次に、ΔT1(t)とΔT1(t+1)の大きい方を選択する。ここでは、ΔT1(t)<ΔT1(t+1)とすると、次式に示すように、ΔT1(t+1)を第1モータジェネレータトルクT1から減じることで、制限後の第1モータジェネレータトルクT1'を算出することができる。
T1'=T1−ΔT1(t+1) …(25)
すなわち、第1モータジェネレータMG1から出力するトルクを、この第1モータジェネレータトルクT1'に制限することで、現演算周期の第1モータジェネレータ回転数N1(t)、並びに、一演算周期前の第1モータジェネレータ回転数N1(t-1)のどちらの回転数の場合でも、バッテリ充放電電力Pがバッテリ制限電力Pbmaxを超過することがない。
P(t)=T1'(t)×N1(t)+P1<Pbmax …(26)
ここで、N1(t)は現時刻での第1モータジェネレータ回転数、T1'(t)は現時刻での制限後の第1モータジェネレータトルクである。
Pe(t+1)=T1'(t)×N1(t+1)+P1=Pbmax …(27)
ここで、N1(t+1)は一演算周期後での第1モータジェネレータ回転数である。
P(t+a)=T1'(t)×N1(t+a)+P1 …(28)
ここで、N1(t+a)は、時刻t+aでの第1モータジェネレータ回転数である。また、第1モータジェネレータトルクは、一演算周期後の制御タイミングt+1まで更新されないため、時刻t+aにおいても第1モータジェネレータトルクはT1'(t)である。
N1(t)<N1(t+a)>N1e(t+1) …(29)
なので、
P(t+a)<Pbmax …(30)
となり、演算周期間において、バッテリ制限電力Pbmaxを超過しない。
実施例1のハイブリッド車の充放電制御装置にあっては、下記に列挙する効果を得ることができる。
[実施例2での充放電制御作用]
実施例2では、「HEV-2ndモード」を例にし、図12に示すフローチャートを用いて説明する。なお、図12に示す制御は、マイコンを用いて所定の演算周期(例えば、10msec)毎に繰り返し実行される。図12に示すフローチャートにおいて、ステップS403以外は、実施例1と同時処理を行うステップであるので、ステップS403についてのみ説明する。
ここで、モータジェネレータ回転数予測手段であるステップS403は、第1モータジェネレータMG1の回転変化率を推定する回転変化率推定部と、推定された回転変化率から一演算周期後の第1モータジェネレータ回転数N1e(t+1)を推定するモータジェネレータ回転数推定部と、を有する。そして、前記回転変化率推定部は、目標駆動力Fに基づき、第1モータジェネレータMG1の回転変化率を推定する。
つまり、一演算周期後の車速VSPe(t+1)は、現演算周期の車速VSP(t)と目標駆動力Fとから、次式を用いて推定する。
VSPe(t+1)=VSP(t)+(F/M)×Ts …(31)
ここで、Tsは演算周期である。次に、次式を用いて一演算周期後の車速VSPe(t+1)を第1モータジェネレータ回転数N1e(t+1)に換算し、ステップS404へ進む。
N1e(t+1)=VSPe(t+1)×α …(32)
ここで、αは第1モータジェネレータ回転数N1と車速VSP(=出力軸回転数)の回転比(=固定変速比)を表す定数である。
実施例2のハイブリッド車の充放電制御装置にあっては、実施例1の(1),(2)の効果に加え、下記の効果を得ることができる。
[実施例3での充放電制御作用]
まず、一演算周期後の車速VSPe(t+1)は、現演算時の車速VSP(t)と目標駆動力Fとから、式(31)を用いて推定する。
次に、現演算時の入力軸回転数Ni(t)と変速操作量uiから一演算周期後の入力軸回転数Nie(t+1)を推定する。まず次式に「HEV-High-iVTモード」の変速操作量uiと入力軸回転数加速度dNi/dtの関係を示す。
dNi/dt=ui+k3Tr+k4Te …(33)
ここで、k3,k4は制御ゲイン、Trは走行抵抗である。この入力軸回転数加速度dNi/dtと現演算jの入力軸回転数Ni(t)とから、一演算周期後の入力軸回転数Nie(t+1)は次式のように求められる。
Nie(t+1)=Ni(t)+dNi/dt×Ts …(34)
また、「HEV-High-iVTモード」には、次式に示すようなN1、N2、Ni、VSPの関係がある。
ここで、k31,k32,k33,k34は回転比を表す定数である。この関係式と、式(31)、式(34)から算出した一演算周期後の車速VSPe(t+1)および入力軸回転数Nie(t+1)から、一演算周期後の第1モータジェネレータ回転数N1e(t+1)、第2モータジェネレータ回転数N2e(t+1)の推定値は、
の式にて求められる。
バッテリ制限電力Pbmaxを現演算周期のバッテリ充放電電力P(t)と、一演算周期後のバッテリ充放電電力Pe(t+1)のいずれもが超過しないときには、第1モータジェネレータトルクT1と第2モータジェネレータトルクT2との関係は、従来例の式(12)で示される。
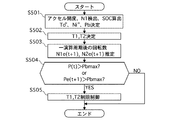
まず、現演算周期のバッテリ充放電電力P(t)は、上記式(11)を用いて算出する。
一演算周期後のバッテリ充放電電力Pe(t+1)は、次式を用いて算出される。
Pe(t+1)=T1×N1e(t+1)+T2×N2e(t+1)+P1 …(37)
次に、一演算周期後のバッテリ充放電電力Pe(t+1)がバッテリ制限電力Pbmaxを超過しない場合、第1モータジェネレータトルクT1と第2モータジェネレータトルクT2との関係は、次式で示される。
Pbmax≧Pe(t+1) …(38)
この式(12)、式(38)が共に成立する領域は、図17の斜線領域で示される。
ステップS502で決定した第1モータジェネレータトルクT1と第2モータジェネレータトルクT2が、図17の斜線領域に含まれる場合は、現演算周期のバッテリ充放電電力P(t)と、一演算周期後のバッテリ充放電電力Pe(t+1)のいずれもが、バッテリ制限電力Pbmaxを超過しない。従って、第1モータジェネレータトルクT1と第2モータジェネレータトルクT2の制限を行わない。一方、ステップS502で決定した第1モータジェネレータトルクT1と第2モータジェネレータトルクT2が、図17の点Aのように斜線領域に含まれない場合は、ステップS505へ進む。
以下に変速操作量uiを維持したまま、両モータジェネレータトルクT1,T2を制限する方法を、図17を用いながら説明する。
変速操作量uiとT1,T2,Teの関係式は式(13)であり、図中の直線(2)で示される。
変速操作量uiを変えずに、バッテリ充放電電力を超過電力ΔP(t)減らすような、補正第1モータジェネレータトルクΔT1、補正第2モータジェネレータトルクΔT2、第1モータジェネレータ回転数N1、第2モータジェネレータ回転数N2の関係は、上記式(14)に示される。このΔT1,ΔT2は図17中の点Aを点Bに移動させる際に必要なトルクの操作量である。
また、変速操作量uiを変えずに、バッテリ充放電電力を超過電力ΔPe(t+1)減らすような、補正第1モータジェネレータトルクΔT1、補正第2モータジェネレータトルクΔT2、第1モータジェネレータ回転数N1、第2モータジェネレータ回転数N2の関係は次式に示される。
K5ΔT1+k6ΔT2=0
Ne1(t+1)ΔT1+Ne2(t+1)ΔT2=ΔPe(t+1) …(39)
このΔT1,ΔT2は図17中の点Aを点Cに移動させる際に必要なトルクの操作量である。次に、式(11)と式(3)から算出した超過電力ΔP(t)と、式(37)と式(23)から算出した超過電力ΔPe(t+1)とを比較する。ここでは、
ΔPe(t+1)>ΔP(t) …(40)
とすると、式(14)から算出した補正第1,第2モータジェネレータトルクΔT1,ΔT2分、両モータジェネレータMG1,MG2のトルクを操作しても、制限電力Pbmaxを超過してしまう。よって、式(39)から補正第1,第2モータジェネレータトルクΔT1,ΔT2を算出する必要がある。
図17で説明すると、点Bでは、バッテリ充放電電力P(t)が制限電力Pbmaxを超過してしまうため、点Cまで制限する必要がある。
したがって、式(39)から算出した補正第1,第2モータジェネレータトルクΔT1,ΔT2を、第1モータジェネレータトルクT1と第2モータジェネレータトルクT2のそれぞれから減じることで、点C(T1'、T2')に制限する。
T1'=T1−ΔT1 …(41)
T2'=T2−ΔT2 …(42)
P(t)={T1'(t)×N1(t)+T2'(t)×N2(t)}+P1<Pbmax …(43)
ここで、N1(t),N2(t)はそれぞれ現時刻での第1,第2モータジェネレータ回転数、T1'(t),T2'(t)は図16のフローチャートに示した制御により決定した制限後の第1,第2モータジェネレータトルクである。
Pe(t+1)={T1'(t)×N1(t+a)+T2'(t)×N2(t+a)}+P1=Pbmax …(44)
の式で示される。
P(t+a)={T1'(t)×N1(t+a)+T2'(t)×N2(t+a)}+P1 …(45)
ここで、N1(t+a),N2(t+a)は、時刻t+aでの第1,第2モータジェネレータ回転数である。また、第1モータジェネレータトルクと第2モータジェネレータトルクは、一演算周期後の制御タイミングt+1まで更新されないため、時刻t+aでの両モータジェネレータトルクは、現時刻での第1モータジェネレータトルクT1(t)、第2モータジェネレータトルクT2(t)と同じである。
N1(t)<N1(t+a)<N1e(t+1)、N2(t)<N2(t+a)<N2e(t+1) …(46)
なので、
P(t+a)<Pbmax …(47)
となり、演算周期間において、バッテリ制限電力Pbmaxを超過しない。
実施例3の電気車両の充放電制御装置にあっては、実施例1,2の効果に加え、下記の効果を得ることができる。
すなわち、車速の変化率は車両の駆動力から推定できる。また、変速比の変化率は変速操作量から推定できる。モータジェネレータ回転数は、車速と変速比により決まるので、車速と変速比の変化率から、モータジェネレータの回転変化率を推定できる。
[実施例4での充放電制御作用]
実施例4では、「HEV-High-iVTモード」を例にし、図16に示すフローチャートを用いて説明する。なお、図16に示す制御は、マイコンを用いて所定の演算周期(例えば、10msec)毎に繰り返し実行される。図16に示すフローチャートにおいて、ステップS503以外は、実施例3と同時処理を行うステップであるので、ステップS503についてのみ説明する。
ここで、モータジェネレータ回転数予測手段であるステップS503は、モータジェネレータMG1,MG2の回転変化率を推定する回転変化率推定部と、推定された回転変化率から一演算周期後のモータジェネレータ回転数を推定するモータジェネレータ回転数推定部と、を有する。そして、前記回転変化率推定部は、変速操作量uiと、一演算周期前と現演算周期の車速変化率に基づき、第1モータジェネレータMG1と第2モータジェネレータMG2の回転変化率を推定する。
つまり、実施例3とは異なり、次式に示すように、現演算周期の車速VSP(t)と、一演算周期前の車速VSPe(t-1)の車速差から、一演算周期後の車速VSPe(t+1)を推定する。
VSPe(t+1)=VSP(t)+{VSP(t)−VSP(t-1)} …(48)
以降、一演算周期後の入力軸回転数Nie(t+1)、第1モータジェネレータ回転数N1e(t+1)、第2モータジェネレータ回転数N2e(t+1)の演算方法は実施例3と共通である。
実施例4のハイブリッド車の充放電制御装置にあっては、実施例1の(1),(2)、実施例3の(7)の効果に加え、下記の効果を得ることができる。
すなわち、駆動力から車速を推定すると、走行抵抗が大きいときには、推定精度が悪化する。大部分の運転状態において、車速の変化は遅いので、一演算周期前の車速と現演算時の車速の差から車速の変化率を推定した方が精度の良い場面が多い。
一方、変速比の変化は速いので、一演算周期前と現演算時の変速比の差から変速比の変化率を推定すると精度は良くない。しかし、変速速度への走行抵抗の影響は非常に小さいので、検出の難しい走行抵抗の大小にかからず、変速操作量から精度良く変速比のhねかりつを推定できる。
MG1 第1モータジェネレータ(モータ)
MG2 第2モータジェネレータ(モータ)
OUT 駆動出力軸
PG1 第1遊星歯車
PG2 第2遊星歯車
PG3 第3遊星歯車
HC ハイクラッチ
EC エンジンクラッチ
SC シリーズクラッチ
MGC モータジェネレータクラッチ
LB ローブレーキ
HLB ハイローブレーキ
1 エンジンコントローラ
2 モータコントローラ
3 インバータ
4 バッテリ
5 油圧制御装置
6 統合コントローラ
7 アクセル開度センサ
8 車速センサ
9 エンジン回転数センサ
10 第1モータジェネレータ回転数センサ
11 第2モータジェネレータ回転数センサ
12 第3リングギヤ回転数センサ
13 第2リングギヤ回転数センサ
Claims (7)
- 動力源として少なくとも1つのモータジェネレータを有し、該モータジェネレータへのトルク指令値を演算するモータジェネレータトルク演算手段を備えた電気車両において、
前記モータジェネレータの現演算周期における回転数を検出するモータジェネレータ回転数検出手段と、
前記モータジェネレータの一演算周期後における回転数を予測するモータジェネレータ回転数予測手段と、を設け、
前記モータジェネレータトルク演算手段は、現演算周期と一演算周期後のモータジェネレータ回転数のどちらにおいても、バッテリの充放電電力がバッテリ劣化を防止する制限値以下となるように、モータジェネレータへのトルク指令値を演算することを特徴とする電気車両の充放電制御装置。 - 請求項1に記載された電気車両の充放電制御装置において、
前記モータジェネレータ回転数予測手段は、モータジェネレータの回転変化率を推定する回転変化率推定部と、推定された回転変化率から一演算周期後のモータジェネレータ回転数を推定するモータジェネレータ回転数推定部と、を有することを特徴とする電気車両の充放電制御装置。 - 請求項2に記載された電気車両の充放電制御装置において、
前記回転変化率推定部は、一演算周期前のモータジェネレータ回転数と現演算周期のモータジェネレータ回転数との回転数差に基づき、モータジェネレータの回転変化率を推定することを特徴とする電気車両の充放電制御装置。 - 請求項2に記載された電気車両の充放電制御装置において、
前記電気車両は、車速に対して、エンジン、モータジェネレータの回転数が一意に決まる変速機を搭載したハイブリッド車であり、
前記回転変化率推定部は、目標駆動力に基づき、モータジェネレータの回転変化率を推定することを特徴とする電気車両の充放電制御装置。 - 請求項2に記載された電気車両の充放電制御装置において、
前記電気車両は、車速とエンジン回転の変速比、もしくは、車速とモータジェネレータ回転の変速比を無段階に変更できる無段変速比モードを有する変速機を搭載したハイブリッド車であり、
前記回転変化率推定部は、目標変速比と実変速比との偏差から変速操作量を決定し、この変速操作量と目標駆動力に基づき、モータジェネレータの回転変化率を推定することを特徴とする電気車両の充放電制御装置。 - 請求項2に記載された電気車両の充放電制御装置において、
前記電気車両は、車速とエンジン回転の変速比、もしくは、車速とモータジェネレータ回転の変速比を無段階に変更できる無段変速比モードを有する変速機を搭載したハイブリッド車であり、
前記回転変化率推定部は、目標変速比と実変速比との偏差から変速操作量を決定し、この変速操作量と、一演算周期前と現演算周期の車速変化率とに基づき、モータジェネレータの回転変化率を推定することを特徴とする電気車両の充放電制御装置。 - 請求項1に記載された電気車両の充放電制御装置において、
前記電気車両は、車速とエンジン回転の変速比、もしくは、車速とモータジェネレータ回転の変速比を無段階に変更できる無段変速比モードを有する変速機を搭載したハイブリッド車であり、
前記モータジェネレータトルク演算手段は、目標変速比と実変速比との偏差から変速操作量を決定し、この変速操作量を維持するようにモータジェネレータへのトルク指令値を演算することを特徴とする電気車両の充放電制御装置。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2004377195A JP4609069B2 (ja) | 2004-12-27 | 2004-12-27 | 電気車両の充放電制御装置 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2004377195A JP4609069B2 (ja) | 2004-12-27 | 2004-12-27 | 電気車両の充放電制御装置 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2006187100A true JP2006187100A (ja) | 2006-07-13 |
| JP4609069B2 JP4609069B2 (ja) | 2011-01-12 |
Family
ID=36739776
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2004377195A Expired - Fee Related JP4609069B2 (ja) | 2004-12-27 | 2004-12-27 | 電気車両の充放電制御装置 |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP4609069B2 (ja) |
Cited By (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| WO2009084358A1 (ja) * | 2007-12-28 | 2009-07-09 | Aisin Aw Co., Ltd. | 回転電機制御システム |
| JP2010104094A (ja) * | 2008-10-21 | 2010-05-06 | Toyota Motor Corp | 電動車両およびその制御方法 |
| EP2840704A4 (en) * | 2012-04-19 | 2016-06-01 | Tbk Co Ltd | RETARDER |
| KR20160133999A (ko) * | 2015-05-14 | 2016-11-23 | 현대자동차주식회사 | 모터 토크 제어 장치 및 그 방법 |
| WO2020229084A1 (de) * | 2019-05-16 | 2020-11-19 | Volkswagen Aktiengesellschaft | Verfahren zum betreiben von wenigstens zwei elektrischen komponenten eines fahrzeuges |
Citations (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH11136808A (ja) * | 1997-10-31 | 1999-05-21 | Nissan Motor Co Ltd | ハイブリッド車両の発電制御装置 |
| JP2000013914A (ja) * | 1998-06-22 | 2000-01-14 | Toyota Motor Corp | 蓄電器を備えた車両の電力制限装置 |
| JP2004316502A (ja) * | 2003-04-15 | 2004-11-11 | Nissan Motor Co Ltd | ハイブリッド車両制御装置 |
-
2004
- 2004-12-27 JP JP2004377195A patent/JP4609069B2/ja not_active Expired - Fee Related
Patent Citations (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH11136808A (ja) * | 1997-10-31 | 1999-05-21 | Nissan Motor Co Ltd | ハイブリッド車両の発電制御装置 |
| JP2000013914A (ja) * | 1998-06-22 | 2000-01-14 | Toyota Motor Corp | 蓄電器を備えた車両の電力制限装置 |
| JP2004316502A (ja) * | 2003-04-15 | 2004-11-11 | Nissan Motor Co Ltd | ハイブリッド車両制御装置 |
Cited By (11)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| WO2009084358A1 (ja) * | 2007-12-28 | 2009-07-09 | Aisin Aw Co., Ltd. | 回転電機制御システム |
| WO2009084359A1 (ja) * | 2007-12-28 | 2009-07-09 | Aisin Aw Co., Ltd. | 回転電機制御システム |
| JPWO2009084359A1 (ja) * | 2007-12-28 | 2011-05-19 | アイシン・エィ・ダブリュ株式会社 | 回転電機制御システム |
| KR101085568B1 (ko) * | 2007-12-28 | 2011-11-25 | 아이신에이더블류 가부시키가이샤 | 회전전기 제어시스템 |
| JP5057180B2 (ja) * | 2007-12-28 | 2012-10-24 | アイシン・エィ・ダブリュ株式会社 | 回転電機制御システム |
| US8405335B2 (en) | 2007-12-28 | 2013-03-26 | Aisin Aw Co., Ltd. | Rotary electric machine control system |
| JP2010104094A (ja) * | 2008-10-21 | 2010-05-06 | Toyota Motor Corp | 電動車両およびその制御方法 |
| EP2840704A4 (en) * | 2012-04-19 | 2016-06-01 | Tbk Co Ltd | RETARDER |
| KR20160133999A (ko) * | 2015-05-14 | 2016-11-23 | 현대자동차주식회사 | 모터 토크 제어 장치 및 그 방법 |
| KR101865721B1 (ko) * | 2015-05-14 | 2018-06-08 | 현대자동차 주식회사 | 모터 토크 제어 장치 및 그 방법 |
| WO2020229084A1 (de) * | 2019-05-16 | 2020-11-19 | Volkswagen Aktiengesellschaft | Verfahren zum betreiben von wenigstens zwei elektrischen komponenten eines fahrzeuges |
Also Published As
| Publication number | Publication date |
|---|---|
| JP4609069B2 (ja) | 2011-01-12 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| EP1738948A1 (en) | Hybrid vehicle control system | |
| JP2005016559A (ja) | ハイブリッド車のモード遷移制御装置 | |
| JP4144576B2 (ja) | ハイブリッド車のモータ発熱回避制御装置 | |
| JP2006298079A (ja) | ハイブリッド車のモード遷移制御装置およびモード遷移制御方法 | |
| JP4135708B2 (ja) | ハイブリッド車の制御装置 | |
| JP2006022844A (ja) | ハイブリッド車両の制御装置 | |
| JP2006034076A (ja) | 車両のモータトルク制御装置 | |
| JP4609069B2 (ja) | 電気車両の充放電制御装置 | |
| JP3918836B2 (ja) | ハイブリッド車のバッテリ電力補償制御装置 | |
| JP4241664B2 (ja) | ハイブリッド車のモード遷移制御装置 | |
| JP4222301B2 (ja) | ハイブリッド車のエンジン始動制御装置 | |
| JP2005304229A (ja) | ハイブリッド車のモータフェイル対応制御装置 | |
| JP2007168679A (ja) | ハイブリッド車両の制御装置 | |
| JP2007069843A (ja) | ハイブリッド車両のエンジン始動制御装置 | |
| JP2006187049A (ja) | ハイブリッド車両の制御装置 | |
| JP4193776B2 (ja) | ハイブリッド車の駆動装置 | |
| JP4144572B2 (ja) | ハイブリッド車両のモード遷移制御装置 | |
| JP4513387B2 (ja) | ハイブリッド車の発電電力制御装置 | |
| JP3945456B2 (ja) | ハイブリッド車のモード遷移制御装置 | |
| JP4039390B2 (ja) | ハイブリッド車のモード遷移制御装置およびモード遷移制御方法 | |
| JP4144559B2 (ja) | ハイブリッド車のエンジン逆転防止制御装置 | |
| JP4228970B2 (ja) | ハイブリッド車のモード遷移制御装置 | |
| JP4103844B2 (ja) | ハイブリッド車のエンジン始動制御装置 | |
| JP2006306170A (ja) | ハイブリッド車の駆動制御装置および駆動制御方法 | |
| JP4192890B2 (ja) | ハイブリッド車のモード遷移制御装置 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20071128 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20100308 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20100316 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20100510 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20100914 |
|
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20100927 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20131022 Year of fee payment: 3 |
|
| R150 | Certificate of patent or registration of utility model |
Free format text: JAPANESE INTERMEDIATE CODE: R150 |
|
| LAPS | Cancellation because of no payment of annual fees |