JP2006155290A - 回転軸の制御装置 - Google Patents
回転軸の制御装置 Download PDFInfo
- Publication number
- JP2006155290A JP2006155290A JP2004345783A JP2004345783A JP2006155290A JP 2006155290 A JP2006155290 A JP 2006155290A JP 2004345783 A JP2004345783 A JP 2004345783A JP 2004345783 A JP2004345783 A JP 2004345783A JP 2006155290 A JP2006155290 A JP 2006155290A
- Authority
- JP
- Japan
- Prior art keywords
- detector
- angular velocity
- rotating body
- rotation
- angular acceleration
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Pending
Links
Images


Classifications
-
- G—PHYSICS
- G05—CONTROLLING; REGULATING
- G05B—CONTROL OR REGULATING SYSTEMS IN GENERAL; FUNCTIONAL ELEMENTS OF SUCH SYSTEMS; MONITORING OR TESTING ARRANGEMENTS FOR SUCH SYSTEMS OR ELEMENTS
- G05B19/00—Programme-control systems
- G05B19/02—Programme-control systems electric
- G05B19/18—Numerical control [NC], i.e. automatically operating machines, in particular machine tools, e.g. in a manufacturing environment, so as to execute positioning, movement or co-ordinated operations by means of programme data in numerical form
- G05B19/404—Numerical control [NC], i.e. automatically operating machines, in particular machine tools, e.g. in a manufacturing environment, so as to execute positioning, movement or co-ordinated operations by means of programme data in numerical form characterised by control arrangements for compensation, e.g. for backlash, overshoot, tool offset, tool wear, temperature, machine construction errors, load, inertia
-
- G—PHYSICS
- G05—CONTROLLING; REGULATING
- G05B—CONTROL OR REGULATING SYSTEMS IN GENERAL; FUNCTIONAL ELEMENTS OF SUCH SYSTEMS; MONITORING OR TESTING ARRANGEMENTS FOR SUCH SYSTEMS OR ELEMENTS
- G05B2219/00—Program-control systems
- G05B2219/30—Nc systems
- G05B2219/37—Measurements
- G05B2219/37323—Derive acceleration from position or speed
Landscapes
- Engineering & Computer Science (AREA)
- Human Computer Interaction (AREA)
- Manufacturing & Machinery (AREA)
- Physics & Mathematics (AREA)
- General Physics & Mathematics (AREA)
- Automation & Control Theory (AREA)
- Control Of Electric Motors In General (AREA)
- Feedback Control In General (AREA)
- Control Of Position Or Direction (AREA)
Abstract
【課題】 回転体と検出器との間に剛性の低い部分が存在することによる振動を抑制または防止する。
【解決手段】 回転体10の回転角加速度を検出する角加速度センサ16を設け、角度/角速度指令値を角加速度の値に従って補正(18)する。
【選択図】 図1
【解決手段】 回転体10の回転角加速度を検出する角加速度センサ16を設け、角度/角速度指令値を角加速度の値に従って補正(18)する。
【選択図】 図1
Description
本発明は、工作機械などにおける回転軸を制御する装置に関する。
工作機械における回転軸の制御では、回転体の回転角度/回転速度を検出してその指令値との差からサーボモータの制御量を算出するフィードバック制御を行なうのが一般的である。
しかしながら、例えば工作機械の割出しテーブルの制御では、回転体と検出器との間に両者を結合する継ぎ手などの剛性の低い部分が存在するため回転体が振動することがある。
本発明の目的は、回転体と検出器との間に剛性の低い部分が存在することによる振動を抑制または防止することにある。
本発明によれば、サーボモータと、該サーボモータにより駆動される回転体と、該回転体の回転角度及び回転角速度の少なくとも一方を検出する検出器と、該回転体の回転角度及び回転角速度の少なくとも一方の指令値と該検出器の検出値とから該サーボモータの制御量を算出する制御処理部と、該回転体の回転角加速度を検出する角加速度検出器と、該角加速度検出器が検出した回転角加速度に応じて前記回転角度指令値、回転角速度指令値およびサーボモータの電流指令値の少なくとも1つを補正する補正演算部とを具備する回転軸の制御装置が提供される。
前記角加速度検出器は前記回転体側に設けられることが望ましい。
前記角加速度検出器は、角速度を検出する角速度検出器と、検出された回転角速度を微分することにより回転角加速度とする微分器とから成り立っている構成をとることが可能である。また前記角加速度検出器の代わりに、該回転体の回転角度および回転角速度の少なくとも一方を検出する検出器以外に、回転体上に角速度検出器を持ち、得られた角速度値を補正演算部で微分して角加速度を演算して指令値を補正する構成を取ることも可能である。
回転軸に作用するトルクは角加速度に比例するから、角加速度を検出してそれに応じて指令値を補正することにより振動の抑制または防止が可能となる。
図1は本発明に係る回転軸制御装置の一例を示す。この回転制御装置は例えば工作機械の割出しテーブルの制御に用いられる。
図1において、回転体10はサーボモータ12に連結されており、サーボモータ12にはさらに、エンコーダなどによる角度/角速度検出器14が連結されている。なお、角速度は例えばエンコーダが出力する角度を時間微分することにより得られる。
回転体10上には回転体10の回転角加速度を検出する角加速度センサ16が設けられる。制御処理部18は角度/角速度指令値と角度/角速度検出値とからサーボモータ12の電流制御値を算出してサーボモータ12へ与える従来の制御処理のほか、角加速度センサ16からの角加速度検出値により角度/角速度指令値を補正する処理を行う。制御処理部18における制御処理の詳細については後述する。角加速度の検出については図1に示すように一般の角加速度センサを使用する以外にも、例えば角度/角速度検出器14において検出される角速度検出値を時間微分して角加速度としても良い。
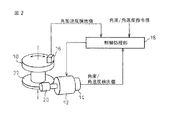
図2は本発明の回転軸制御装置の他の例を示す。サーボモータ12と回転体10との間がウォーム20とギヤ22で連結されている点が図1の例と異なる。
図3は図1および図2の制御処理部18における制御処理の詳細を示すブロック線図である。
図3において、サーボモータ12に連結されたエンコーダにより検出された角度検出値23が位置フィードバックとして用いられ、位置指令との差分(25)から、位置制御処理部24において例えば周知のPID演算により速度指令が算出される。次に、検出された角速度値26が速度フィードバックとして用いられて速度指令との差分(27)から、速度制御処理部26において例えば周知のPID演算により電流指令が算出される。さらに、サーボモータ12の電流が検出され、電流検出値28と電流指令の差分(30)から、電流制御処理部32において、例えば周知のPID演算により電流制御値が算出されてサーボモータ12に与えられる。
回転体10上に設けられた角加速度センサ16により検出された回転体10の回転角加速度の値は位置指令の補正(34)、速度指令の補正(36)、および電流指令の補正(38)に用いられる。その補正のための演算部40における演算は例えば
(補正後指令値)=(補正前指令値)+(係数)×(角加速度検出値)
の式により行う。上式の係数は、回転体の振動が抑制またはなくなるように、トライアンドエラーの手法により決定される。
(補正後指令値)=(補正前指令値)+(係数)×(角加速度検出値)
の式により行う。上式の係数は、回転体の振動が抑制またはなくなるように、トライアンドエラーの手法により決定される。
Claims (5)
- サーボモータと、
該サーボモータにより駆動される回転体と、
該回転体の回転角度及び回転角速度の少なくとも一方を検出する検出器と、
該回転体の回転角度及び回転角速度の少なくとも一方の指令値と該検出器の検出値とから該サーボモータの制御量を算出する制御処理部とを具備し、
上記検出器とは別に該回転体の回転角加速度を検出する角加速度検出器を持ち、その角加速度検出器が検出した回転角加速度に応じて前記回転角度指令値、回転角速度指令値およびサーボモータの電流指令値の少なくとも1つを補正する補正演算部とを具備する回転軸の制御装置。 - 前記角加速度検出器は前記回転体側に設けられる請求項1記載の回転軸の制御装置。
- サーボモータと、
該サーボモータにより駆動される回転体と、
該回転体の回転角度及び回転角速度の少なくとも一方を検出する検出器と、
該回転体の回転角度及び回転角速度の少なくとも一方の指令値と該検出器の検出値とから該サーボモータの制御量を算出する制御処理部とを具備し、
上記検出器とは別に該回転体の回転角速度を検出する角速度検出器、およびその角速度検出器が検出した回転角速度を微分することにより回転角加速度を求める微分器を備え、得られた回転角加速度により前記回転角度指令値、回転角速度指令値およびサーボモータの電流指令値の少なくとも1つを補正演算する回転軸の制御装置。 - 前記角速度検出器は前記回転体側に設けられる請求項3記載の回転軸の制御装置。
- 前記角速度検出器と前記微分器が一体化されていることを特長とする、請求項3に記載の回転軸の制御装置。
Priority Applications (4)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2004345783A JP2006155290A (ja) | 2004-11-30 | 2004-11-30 | 回転軸の制御装置 |
| EP05025890A EP1662348A1 (en) | 2004-11-30 | 2005-11-28 | Rotary shaft control apparatus |
| US11/288,282 US7196489B2 (en) | 2004-11-30 | 2005-11-29 | Rotary shaft control apparatus |
| CN200510124286.5A CN1782931A (zh) | 2004-11-30 | 2005-11-29 | 旋转轴的控制装置 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2004345783A JP2006155290A (ja) | 2004-11-30 | 2004-11-30 | 回転軸の制御装置 |
Publications (1)
| Publication Number | Publication Date |
|---|---|
| JP2006155290A true JP2006155290A (ja) | 2006-06-15 |
Family
ID=35695731
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2004345783A Pending JP2006155290A (ja) | 2004-11-30 | 2004-11-30 | 回転軸の制御装置 |
Country Status (4)
| Country | Link |
|---|---|
| US (1) | US7196489B2 (ja) |
| EP (1) | EP1662348A1 (ja) |
| JP (1) | JP2006155290A (ja) |
| CN (1) | CN1782931A (ja) |
Families Citing this family (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US7638963B2 (en) * | 2005-09-26 | 2009-12-29 | Centricity Corporation | Rotary indexing table driven by an induction motor |
| EP2372312B1 (de) * | 2010-03-31 | 2013-11-20 | SICK STEGMANN GmbH | Feedback-Anordnung und Feedback-Verfahren zur Regelung eines Servomotors |
| JP6332900B2 (ja) * | 2012-08-31 | 2018-05-30 | セイコーエプソン株式会社 | ロボットシステム及びロボット制御装置 |
| JP6349687B2 (ja) * | 2013-11-14 | 2018-07-04 | オムロン株式会社 | エンコーダおよびサーボシステム |
Family Cites Families (8)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| GB1322713A (en) * | 1969-10-17 | 1973-07-11 | Nat Res Dev | Tachogenerators |
| US4139811A (en) * | 1976-10-26 | 1979-02-13 | Xerox Corporation | Method and means for increasing the stiffness of limited frequency servo systems |
| US5475291A (en) * | 1992-12-10 | 1995-12-12 | Matsushita Electric Industrial Co., Ltd. | Adjustment device for adjusting control parameters of a servo motor and an adjustment method therefor |
| JP3184044B2 (ja) * | 1994-05-24 | 2001-07-09 | キヤノン株式会社 | 微動位置決め制御装置 |
| JP3297643B2 (ja) * | 1997-10-14 | 2002-07-02 | 東芝機械株式会社 | 送り駆動系のサーボ制御方法およびサーボ制御装置 |
| JP4762388B2 (ja) | 1999-06-25 | 2011-08-31 | 大同工業株式会社 | 孔明け装置 |
| WO2001057854A2 (en) * | 2000-02-07 | 2001-08-09 | Seagate Technology Llc | Rotational acceleration correction in a disc drive |
| JP4061845B2 (ja) * | 2001-01-18 | 2008-03-19 | 松下電器産業株式会社 | サーボシステム |
-
2004
- 2004-11-30 JP JP2004345783A patent/JP2006155290A/ja active Pending
-
2005
- 2005-11-28 EP EP05025890A patent/EP1662348A1/en not_active Withdrawn
- 2005-11-29 US US11/288,282 patent/US7196489B2/en not_active Expired - Fee Related
- 2005-11-29 CN CN200510124286.5A patent/CN1782931A/zh active Pending
Also Published As
| Publication number | Publication date |
|---|---|
| CN1782931A (zh) | 2006-06-07 |
| US7196489B2 (en) | 2007-03-27 |
| EP1662348A1 (en) | 2006-05-31 |
| US20060113947A1 (en) | 2006-06-01 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP4299793B2 (ja) | 制御装置 | |
| JP3899526B2 (ja) | 位置制御装置 | |
| JP4335123B2 (ja) | 制御装置 | |
| EP1439440A2 (en) | Servo motor drive control device | |
| US9533414B2 (en) | Torque detecting method and arm device | |
| JP2010148178A (ja) | イナーシャ推定を行う制御装置及び制御システム | |
| JP5739400B2 (ja) | 被駆動体の位置補正機能を有するサーボ制御装置 | |
| TWI508425B (zh) | 馬達之控制方法及馬達之控制裝置 | |
| WO2018212305A1 (ja) | モータ制御システム、モータ制御システムの制御方法、及びロボットシステム | |
| JP2006155362A (ja) | 回転軸制御装置 | |
| JP2020011361A5 (ja) | ロボットシステムおよびロボットシステムの制御方法 | |
| JP4827678B2 (ja) | アクチュエータの位置変動抑制方法 | |
| JP2006155290A (ja) | 回転軸の制御装置 | |
| JP2010160019A (ja) | 回転バランス修正装置及び方法 | |
| JP2006293624A (ja) | 多軸制御装置 | |
| JP4908377B2 (ja) | 回転構造物の位置制御方法 | |
| JP6666126B2 (ja) | トルクリップル補正機能を備えた制御装置 | |
| JP2016005296A (ja) | モータ駆動装置の制御方法、モータ駆動装置及びロボット装置 | |
| JP5412726B2 (ja) | モータ制御装置 | |
| JP2016190305A (ja) | 位置決め装置のパラメータ設定方法、及びパラメータ設定装置、並びにこのパラメータ設定装置を備えた位置決め装置 | |
| US20220176557A1 (en) | Robot control method and robot control device | |
| JP2003223225A (ja) | 位置決めシステム | |
| JP2014033535A (ja) | モータ制御装置 | |
| JP3291902B2 (ja) | サーボ制御装置 | |
| JP2011058820A (ja) | 角速度センサーの補正方法 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20080619 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20080624 |
|
| A02 | Decision of refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A02 Effective date: 20081021 |