JP2006139208A - 能動消音制御装置 - Google Patents
能動消音制御装置 Download PDFInfo
- Publication number
- JP2006139208A JP2006139208A JP2004330891A JP2004330891A JP2006139208A JP 2006139208 A JP2006139208 A JP 2006139208A JP 2004330891 A JP2004330891 A JP 2004330891A JP 2004330891 A JP2004330891 A JP 2004330891A JP 2006139208 A JP2006139208 A JP 2006139208A
- Authority
- JP
- Japan
- Prior art keywords
- control
- sound
- motor
- speaker
- optimum
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Pending
Links
Images










































Landscapes
- Structures Of Non-Positive Displacement Pumps (AREA)
- Soundproofing, Sound Blocking, And Sound Damping (AREA)
Abstract
【課題】 モータの速度ゲインの変化に伴って様々な周波数の騒音が発生するような状況でも、その様々な周波数の騒音を追従遅れなく確実に打消すことが可能な能動消音制御装置を提供する。
【解決手段】 適応フィルタの適応フィルタ係数を決定する要素であり且つ音の収束速度を決定する制御パラメータである収束係数を、モータの速度ゲインが設定値以上の場合に大きく設定して設定値未満の場合に小さく設定する。
【選択図】 図6
Description
図1において、1は室外機で、コンプレッサ2、室外ファン3、モニタ用マイク4、制御用スピーカ5、能動消音制御基板(以下、ANC制御基板という)6、および制御基板7を有している。モニタ用マイク4は、制御用スピーカ5から放射される音の放射領域に配置され、その放射領域内の音を捕らえる。制御用スピーカ5は、コンプレッサ2のモータ(後述のコンプレッサモータ2M)に向けて、騒音打消用の音を発する。
11は室内機で、室内ファン12、モニタ用マイク13、制御用スピーカ14、能動消音制御基板(以下、ANC制御基板という)15、および制御基板16を有している。モニタ用マイク13は、制御用スピーカ14から放射される音の放射領域に配置され、その放射領域内の音を捕らえる。制御用スピーカ14は、室内ファン12のモータ(後述の室内ファンモータ12M)に向けて、騒音打消用の音を発する。ANC制御基板15は、制御基板16とのシリアル通信により、室内ファンモータ12Mに対する騒音打消用の音を生成する。制御基板16は、室内機11および室外機1の全体を制御する。
hnew:適応フィルタ係数の更新値
hold:前回の適応フィルタ係数
k:0,1,〜M(フィルタ次数)
e:誤差信号(=d−y)
x:参照信号(回転位置検出信号等)
μ:収束速度
ここで、収束速度μは、適応フィルタ係数hを決定する要素であって、とくに音の収束速度(音が低減していく速度)を決定する制御パラメータであり、大きく設定すれば打消し対象である音の収束が速くなり、小さく設定すれば打消し対象である音の収束は遅くなるものの外乱の影響を受け難く安定した動作が可能となる。
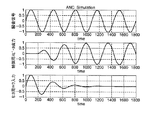
コンプレッサモータ2Mおよび室内ファンモータ12Mの制御では、目標速度と現行速度との差や、負荷条件などにより、加減速時の速度ゲイン(単位時間当たりの速度変動量(rps/s))を切り換える制御が行われる。たとえば、目標速度と現行速度との差が大きい場合には、速度ゲインを大きく設定して速度(回転数)を早期に目標速度に到達させ、差が小さくなったら、速度ゲインを小さく設定して、速度が目標速度を挟んで変動してしまうハンチングを防ぐ制御が行われる。
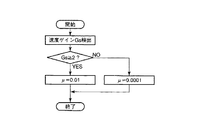
図7のフローチャートに示すように、モータの速度ゲインGsが検出される。そして、収束係数μが、検出された速度ゲインGsに比例して段階的に設定される。すなわち、速度ゲインGsが設定値“4”以上の場合、収束係数μ=0.1が設定される。速度ゲインGsが設定値“4”未満、設定値“3”以上の場合、収束係数μ=0.01が設定される。速度ゲインGsが設定値“3”未満、設定値“2”以上の場合、収束係数=0.001が設定される。速度ゲインGsが設定値“2”未満、設定値“1”以上の場合、収束係数=0.0001が設定される。速度ゲインGsが設定値“1”未満の場合は、収束係数μ=0.00001が設定される。
他の構成および作用は第1の実施形態と同じである。よって、その説明は省略する。
図8に示すように、室外機1において、ANC制御基板6の構成が制御基板7に一体化される。さらに、室内機11において、ANC制御基板15の構成が制御基板16に一体化される。
他の構成および作用は第1の実施形態と同じである。よって、その説明は省略する。
室外機1および室内機11において、ANC制御基板6(および15)のそれぞれ不揮発性メモリであるE2PROM(記憶手段)に、制御用スピーカ5(および14)の最適出力ゲインG0がモータ2M(および12M)の回転数ごとに記憶され、かつモータ2M(および12M)の回転位置と制御用スピーカ5(および14)の出力信号との最適位相差φ0がモータ2M(および12M)の回転数ごとに記憶されている。
(1)モータ2M(または12M)の回転数が変化したとき、予め実験によって決めた、各回転数に対応する最適出力ゲインG0および最適位相差φ0をE2PROMから読み出す読出手段。
(2)上記読出手段で読み出された最適出力ゲインG0、同読み出された最適位相差φ0、およびモータ2M(または12M)の実際の回転位置φ(制御基板7,16から知らされる)を用いた下式の演算により、制御用スピーカ5(または14)の最適出力SPoutを求めてその値に同制御用スピーカ5(または14)の出力を更新設定する制御手段。
SPout=G0・sin(φ0+φ)
作用を説明する。
図9のフローチャートに示すように、モータ2M(または12M)の回転数が変化したとき、その回転数に対応する最適出力ゲインG0および最適位相差φ0が読み出される。そして、読み出された最適出力ゲインG0、同読み出された最適位相差φ0、およびモータ2M(または12M)の実際の回転位置φを用いた演算により、制御用スピーカ5(または14)の最適出力SPoutが求められ、その値に同制御用スピーカ5(または14)の出力が更新設定される。この結果、それぞれの速度に対応して最適な打消し音の発生を得ることができる。他の構成および作用は第1の実施形態と同じである。よって、その説明は省略する。
室外機1および室内機11において、ANC制御基板6(および15)のそれぞれ不揮発性メモリであるE2PROM(記憶手段)に、制御用スピーカ5(および14)の最適出力ゲインG0がモータ2M(および12M)の回転数ごとに記憶され、かつモータ2M(および12M)の回転位置と制御用スピーカ5(および14)の出力信号との最適位相差φ0がモータ2M(および12M)の回転数ごとに記憶されている。
(1)モータ2M(または12M)の回転数が変化したとき、その回転数に対応する最適出力ゲインG0および最適位相差φ0をE2PROMから読み出す第0読出手段。
(2)上記読出手段で読み出された最適出力ゲインG0、同読み出された最適位相差φ0、およびモータ2M(または12M)の実際の回転位置φ(制御基板7,16から知らされる)を用いた下式の演算により、制御用スピーカ5(または14)の最適出力SPoutを求めてその値に同制御用スピーカ5(または14)の出力を更新設定する第0制御手段。
SPout=G0・sin(φ0+φ)
(3)モータ2M(または12M)の回転数が一定時間以上にわたって一定のとき、モータ2M(または12M)の回転数に対応する最適出力ゲインG0および最適位相差φ0を前記記憶手段から読み出す第1読出手段。
SPout=G0・sin(φ0+Δφ+φ)
(5)上記第1制御手段の処理後、モニタ用マイク4(または13)からの入力レベルの平均値を算出する第1算出手段。
SPout=(G0+ΔG)・sin(φp+φ)
(8)上記第3制御手段の処理後、モニタ用マイク4(または13)からの入力レベルの平均値を算出する第2算出手段。
図10のフローチャートに示すように、モータ2M(または12M)の回転数が一定時間以上にわたって一定のとき、モータ2M(または12M)の回転数に対応する最適出力ゲインG0および最適位相差φ0が読み出される。
この更新設定の処理後、モニタ用マイク4(または13)からの入力レベルの平均値が算出される。そして、算出結果が最小となるように上記微調整幅Δφの設定からの処理が繰り返され、最小となったときの演算に用いられた微調整幅Δφの分だけE2PROM内の最適位相差φ0が補正されてφp(=φ0+Δφ)に更新される。
この更新設定の処理後、モニタ用マイク4(または13)からの入力レベルの平均値が算出される。そして、算出結果が最小となるように上記微調整幅ΔGの設定からの処理が繰り返され、最小となったときの演算に用いられた微調整幅ΔGの分だけE2PROM内の最適出力ゲインG0が補正されてGp(=G0+ΔG)に更新される。
他の構成および作用は第1の実施形態と同じである。よって、その説明は省略する。
図11に示すように、室外機1において、室外ファン3の音(羽根ピッチ音)を打消すためのもう1つのモニタ用マイク4およびもう1つの制御用スピーカ5が設けられている。この場合、室外機1のANC制御では、コンプレッサモータ2Mの騒音および室外ファン3の音をそれぞれ打消すための2チャンネルの音が生成される。
他の構成および作用は第1の実施形態と同じである。よって、その説明は省略する。
図12に示すように、室外機1において、モニタ用マイク4が取り除かれている。室内機11でも、モニタ用マイク13が取り除かれている。室外機1のANC制御および室外機11のANC制御のいずれにおいても、音のモニタを要することなく、打消用の音が安価に生成される。大きな外乱、変動がない条件であれば、モニタ用マイク4(13)によるフィードバックをかけなくとも、騒音の打消しは可能となる。空気調和機の室外機、室内機ではそれほど大きな外乱がない場合が多い。このような場合は、モニタ用マイク4(13)を不要としてコスト低減を図ることができる。
他の構成および作用は第1の実施形態と同じである。よって、その説明は省略する。
室外機1の制御基板7におけるコンプレッサモータ駆動回路として、図13に示すモータ駆動回路が採用されている。このモータ駆動回路は、商用交流電源の電圧を整流する倍電圧整流回路、その倍電圧整流回路の出力を三相交流電圧に変換するスイッチング回路、このスイッチング回路のスイッチング素子をオン,オフ駆動するためのPWM変調信号を出力するMCUを有している。MCUは、PWM変調に必要なモータの回転位置データを、スイッチング回路における各相のシャント抵抗Ru,Rv,Rwに生じる電圧から取り込む。
他の構成は、第1の実施形態と同じであり、その説明は省略する。
図15に示すように、モータ駆動回路のスイッチング回路に流れる電流のレベルが電流センサ30によって検知され、その検知レベルが比較器31において基準レベルVrefと比較される。
すなわち、速度ゲインが零でない場合、つまり速度変動中は、適応フィルタ係数hの更新が行われ(オン)、速度ゲインが零、つまり速度変動がなく、その状態が監視タイマーの計時TIMに基づく一定時間(指定値)経過した場合には適応フィルタ係数hの更新が停止される(オフ)。
図17に示すように、モータ駆動回路に、整流回路およびスイッチング素子からなる高力率制御回路が組み込まれている。高力率制御回路は、倍電圧整流回路の入力側に接続され、AC割込みを始点に昇圧パルスを発生して、電流の起動を早め、力率を改善する。簡単な回路でありながら、99%近い入力力率に改善することができる。具体的には、電流が流れていない無通電期間の補償を行うもので、入力電圧(AC)の零クロスを検出し、これを始点にスイッチング素子を一定時間オンし、リアクタに強制的に短絡電流を流す。さらに、リアクタを短絡することで、エネルギを蓄積できるため、昇圧機能が得られ、PAM制御ができる。なお、昇圧パルス(短絡パルス)は、MCUのPPG(プログラム・パルス・ジェネレータ)で生成される。
この第11の実施形態は、室外ファン3の音(羽根ピッチ音)を打消すためのモニタ用マイク4および制御用スピーカ5を有するもので、たとえば図11に示した第6の実施形態に適用される。
室外機1の筐体内は、仕切り板44によって上記通風路と機械室に分けられている。機械室には、コンプレッサ2が設けられている。筐体内の上部には、ANC制御基板6や制御基板7が収められた電気ボックス8が設けられている。
図29に示すように、制御用スピーカ5の振動板52の前に前面調整板53が設けられている。前面調整板53は、複数の開口53aを有し、制御用スピーカ5の前側に出る音の量と後側に出る音の量との比率を調整する働きをする。
図30に示すように、制御用スピーカ5の背後に背面調整板54が設けられている。背面調整板54は、複数の開口54aを有し、制御用スピーカ5の前側に出る音の量と後側に出る音の量との比率を調整する働きをする。
図31に示すように、制御用スピーカ5の振動板52の前に前面調整板53が設けられているとともに、制御用スピーカ5の背後に背面調整板54が設けられている。前面調整板53および背面調整板54は、それぞれ複数の開口53a,54aを有し、制御用スピーカ5の前側に出る音の量と後側に出る音の量との比率を調整する働きをする。
図32に示すように、室外機1の筐体において、前面の吹出口42を挟む位置に、2つの開口45が形成されている。一方の開口45内には、第11の実施形態と同じく制御用スピーカ5が設けられている。他方の開口45内には、図23に示したような、背後に遮音箱を有する構成の制御用スピーカ50が設けられている。
この第16の実施形態は、室外ファン3の騒音ピークの発生態様を考慮して、第15の実施形態における制御用スピーカ50の取り付け状態を変更したものであり、図33に示すように、制御用スピーカ50の前面が室外ファン3に対向している。これに伴い、室外機1の筐体における開口45は、制御用スピーカ5用の1つだけ形成されている。
図34および図35に示すように、室外機1の筐体において、前面の吹出口42の近傍に開口46が形成され、その開口46の内側にダクト47を介して制御用スピーカ5が取り付けられている。制御用スピーカ5の振動板52から発せられる音は、ダクト47および開口46を通り、筐体の前面側に放出される。
図37に示すように、リモコン20に代えて、能動消音制御装置が搭載されたワイヤレス式のリモートコントロール装置(以下、リモコンという)70が用意されている。
図40に示すように、参照用マイク71を支えるリンク機構75に代えて、伸縮自在で角度可変のポール77が採用されている。モニタ用マイク72についても、ロッド76に代えて、伸縮自在で角度可変のポール78が採用されている。
図41のフローチャートに示すように、室内機11の風量が“微風”の場合、能動消音制御が自動的にオフされる。騒音レベルが問題とならない“微風”時に能動消音制御が働くと、強い外乱が発生した場合に能動消音制御の動作が不安定となる可能性があるため、あらかじめ能動消音制御をオフするようにしている。
図42のフローチャートに示すように、室内機11で運転モードや風量の変更があった場合に、適応フィルタ係数を決定する要素であって且つ音の収束速度を決定する制御パラメータである収束係数μが、一定時間だけ大きく設定される。たとえば、μ=0.1が設定される。
図43のフローチャートに示すように、室内機11の風量が“弱風”に設定された場合、参照すべき音やモニタすべき音のレベルが小さくなることを考慮し、参照用マイク71およびモニタ用マイク72からの音入力回路(増幅回路)の増幅率がそれぞれアップされる。
Claims (7)
- 音信号を生成して出力する適応フィルタを備え、消音対象のモータの音をモニタ用マイクで捕らえ、モニタ用マイクからの入力と前記適応フィルタの出力との差をその適応フィルタにフィードバックして同適応フィルタの適応フィルタ係数を修正することにより、前記モータの音に対する打消用の音信号を前記適応フィルタから得て制御用スピーカに供給し、制御用スピーカから出る音を前記モータに向け放射する能動消音制御装置において、前記適応フィルタ係数を決定する要素であり且つ音の収束速度を決定する制御パラメータである収束係数を、前記モータの速度ゲインが設定値以上の場合に大きく設定して設定値未満の場合に小さく設定する制御手段、を備えたことを特徴とする能動消音制御装置。
- 前記制御手段は、前記収束係数を、前記モータの速度ゲインに比例して段階的に設定することを特徴とする請求項1に記載の能動消音制御装置。
- 前記制御用スピーカの最適出力ゲインG0を前記モータの回転数ごとに記憶し、かつ前記モータの回転位置と前記制御用スピーカの出力信号との最適位相差φ0を前記モータの回転数ごとに記憶した記憶手段と、前記モータの回転数が変化したとき、その回転数に対応する最適出力ゲインG0および最適位相差φ0を前記記憶手段から読み出す読出手段と、この読出手段で読み出された最適出力ゲインG0、同読み出された最適位相差φ0、および前記モータの実際の回転位置φを用いた演算により、前記制御用スピーカの最適出力SPoutを求めてその値に同制御用スピーカの出力を更新設定する制御手段と、をさらに備えたことを特徴とする請求項1に記載の能動消音制御装置。
- 前記モータの回転数が一定時間以上にわたって一定のとき、前記モータの回転数に対応する最適出力ゲインG0および最適位相差φ0を前記記憶手段から読み出す読出手段と、この読出手段で読み出された最適位相差φ0に対する所定の微調整幅Δφを設定し、前記読出手段で読み出された最適出力ゲインG0、同読み出された最適位相差φ0、前記設定した微調整幅Δφ、および前記モータの実際の回転位置φを用いた演算により、前記制御用スピーカの最適出力SPoutを求めてその値に同制御用スピーカの出力を更新設定する第1制御手段と、この第1制御手段の処理後、前記モニタ用マイクからの入力レベルの平均値を算出する算出手段と、この算出手段の算出結果が最小となるように前記第1制御手段の処理を繰り返し、最小となったときの演算に用いられた微調整幅Δφの分だけ前記記憶手段内の最適位相差φ0を補正してφp(=φ0+Δφ)に更新する第2制御手段と、この第2制御手段の処理後、前記読出手段で読み出された最適出力ゲインG0に対する所定の微調整幅ΔGを設定し、前記読出手段で読み出された最適出力ゲインG0、前記第2制御手段の更新値である最適位相差φp、前記設定した微調整幅ΔG、および前記モータの実際の回転位置φを用いた演算により、前記制御用スピーカの最適出力SPoutを求めてその値に同制御用スピーカの出力を更新設定する第3制御手段と、この第3制御手段の処理後、前記モニタ用マイクからの入力レベルの平均値を算出する算出手段と、この算出手段の算出結果が最小となるように前記第3制御手段の処理を繰り返し、最小となったときの演算に用いられた微調整幅ΔGの分だけ前記記憶手段内の最適出力ゲインG0を補正して更新する第4制御手段と、をさらに備えたことを特徴とする請求項3に記載の能動消音制御装置。
- ファンの音に対する打消用の音を生成して制御用スピーカから発する能動消音制御装置において、
前記制御用スピーカは、励磁ユニットおよび振動板からなり、振動板の前側に出る音の位相と後側に出る音の位相が互いに逆で、背後に遮音箱を持たない構成であって、
この制御用スピーカの振動板の前側が前記ファンの送風下流側に対応し、かつ振動板の後側が前記ファンの送風上流側に対応する状態に、同制御用スピーカを配置したことを特徴とする能動消音制御装置。 - 前記制御用スピーカは、振動板の前側に出る音の量と後側に出る音の量との比率を調整するための調整板を付属して備えていることを特徴とする請求項5に記載の能動消音制御装置。
- 空気調和機の室内機およびその室内機に対する運転操作用のワイヤレス式のリモートコントロール装置に、前記室内機から出る音を捕らえる参照用マイクと、前記室内機から出る音に対する打消用の音を放射する制御用スピーカと、この制御用スピーカから放射される音の放射領域に配置されるモニタ用マイクと、前記参照用マイクおよび前記モニタ用マイクからの入力に応じて前記打消用の音を生成する制御手段とを備えたことを特徴とする能動消音制御装置。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2004330891A JP2006139208A (ja) | 2004-11-15 | 2004-11-15 | 能動消音制御装置 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2004330891A JP2006139208A (ja) | 2004-11-15 | 2004-11-15 | 能動消音制御装置 |
Related Child Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2010145431A Division JP4918606B2 (ja) | 2010-06-25 | 2010-06-25 | 能動消音制御装置 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2006139208A true JP2006139208A (ja) | 2006-06-01 |
| JP2006139208A5 JP2006139208A5 (ja) | 2007-10-11 |
Family
ID=36620063
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2004330891A Pending JP2006139208A (ja) | 2004-11-15 | 2004-11-15 | 能動消音制御装置 |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP2006139208A (ja) |
Cited By (9)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2008160597A (ja) * | 2006-12-25 | 2008-07-10 | Takenaka Komuten Co Ltd | 騒音低減装置 |
| WO2011030613A1 (ja) * | 2009-09-14 | 2011-03-17 | シャープ株式会社 | 空気調和機の運転騒音制御方法 |
| JP2012088734A (ja) * | 2011-12-26 | 2012-05-10 | Takenaka Komuten Co Ltd | 騒音低減装置 |
| WO2014208095A1 (ja) * | 2013-06-28 | 2014-12-31 | パナソニックIpマネジメント株式会社 | 換気装置 |
| JP2015010530A (ja) * | 2013-06-28 | 2015-01-19 | パナソニックIpマネジメント株式会社 | 換気装置 |
| JP2015028301A (ja) * | 2013-07-30 | 2015-02-12 | パナソニックIpマネジメント株式会社 | 換気装置 |
| JP2015048795A (ja) * | 2013-09-03 | 2015-03-16 | パナソニックIpマネジメント株式会社 | 換気装置 |
| JP6409109B1 (ja) * | 2017-09-20 | 2018-10-17 | 中原大學 | ファンの騒音制御システム |
| EP3511930A1 (en) * | 2009-11-02 | 2019-07-17 | Mitsubishi Electric Corporation | Air-conditioning-apparatus equipped with noise control system |
Citations (7)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH02224498A (ja) * | 1989-02-25 | 1990-09-06 | Calsonic Corp | アクティブ・ノイズ・キャンセラー |
| JPH0348072U (ja) * | 1989-09-19 | 1991-05-08 | ||
| JPH03294731A (ja) * | 1990-04-12 | 1991-12-25 | Matsushita Electric Ind Co Ltd | 空気調和機の室外ユニット |
| JPH06124092A (ja) * | 1992-10-12 | 1994-05-06 | Hitachi Ltd | 空気調和機の消音装置 |
| JPH0822291A (ja) * | 1994-07-06 | 1996-01-23 | Sekisui Chem Co Ltd | 移動可能な能動消音装置 |
| JPH0883831A (ja) * | 1994-09-13 | 1996-03-26 | Nec Corp | 半導体装置の製造装置 |
| JPH08123433A (ja) * | 1994-10-21 | 1996-05-17 | Ono Sokki Co Ltd | アクティブ消音装置 |
-
2004
- 2004-11-15 JP JP2004330891A patent/JP2006139208A/ja active Pending
Patent Citations (7)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH02224498A (ja) * | 1989-02-25 | 1990-09-06 | Calsonic Corp | アクティブ・ノイズ・キャンセラー |
| JPH0348072U (ja) * | 1989-09-19 | 1991-05-08 | ||
| JPH03294731A (ja) * | 1990-04-12 | 1991-12-25 | Matsushita Electric Ind Co Ltd | 空気調和機の室外ユニット |
| JPH06124092A (ja) * | 1992-10-12 | 1994-05-06 | Hitachi Ltd | 空気調和機の消音装置 |
| JPH0822291A (ja) * | 1994-07-06 | 1996-01-23 | Sekisui Chem Co Ltd | 移動可能な能動消音装置 |
| JPH0883831A (ja) * | 1994-09-13 | 1996-03-26 | Nec Corp | 半導体装置の製造装置 |
| JPH08123433A (ja) * | 1994-10-21 | 1996-05-17 | Ono Sokki Co Ltd | アクティブ消音装置 |
Cited By (12)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2008160597A (ja) * | 2006-12-25 | 2008-07-10 | Takenaka Komuten Co Ltd | 騒音低減装置 |
| WO2011030613A1 (ja) * | 2009-09-14 | 2011-03-17 | シャープ株式会社 | 空気調和機の運転騒音制御方法 |
| JP2011058772A (ja) * | 2009-09-14 | 2011-03-24 | Sharp Corp | 空気調和機の運転騒音制御方法 |
| US9466284B2 (en) | 2009-09-14 | 2016-10-11 | Sharp Kabushiki Kaisha | Operational noise control method for air conditioner |
| EP3511930A1 (en) * | 2009-11-02 | 2019-07-17 | Mitsubishi Electric Corporation | Air-conditioning-apparatus equipped with noise control system |
| JP2012088734A (ja) * | 2011-12-26 | 2012-05-10 | Takenaka Komuten Co Ltd | 騒音低減装置 |
| WO2014208095A1 (ja) * | 2013-06-28 | 2014-12-31 | パナソニックIpマネジメント株式会社 | 換気装置 |
| JP2015010530A (ja) * | 2013-06-28 | 2015-01-19 | パナソニックIpマネジメント株式会社 | 換気装置 |
| US10041496B2 (en) | 2013-06-28 | 2018-08-07 | Panasonic Intellectual Property Management Co., Ltd. | Ventilation device |
| JP2015028301A (ja) * | 2013-07-30 | 2015-02-12 | パナソニックIpマネジメント株式会社 | 換気装置 |
| JP2015048795A (ja) * | 2013-09-03 | 2015-03-16 | パナソニックIpマネジメント株式会社 | 換気装置 |
| JP6409109B1 (ja) * | 2017-09-20 | 2018-10-17 | 中原大學 | ファンの騒音制御システム |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP4918606B2 (ja) | 能動消音制御装置 | |
| CN100589177C (zh) | 有源降噪装置 | |
| US9478209B2 (en) | Tunable active noise control | |
| US8903101B2 (en) | Active noise reduction system | |
| CN102422346B (zh) | 音频噪声消除 | |
| WO2007011010A1 (ja) | 能動騒音低減装置 | |
| US20080247560A1 (en) | Audio output device | |
| CN104299610A (zh) | 有源降噪自适应滤波器自适应率调节 | |
| JP2006139208A (ja) | 能動消音制御装置 | |
| US10373602B2 (en) | Active noise cancellation | |
| CA2876029A1 (en) | System and method for attenuating noise from a fluid machine or a turbulent noise source | |
| JP2512979B2 (ja) | 自動車用空調装置の騒音低減装置 | |
| KR102805486B1 (ko) | 차량의 음향 발생 장치 및 방법 | |
| JP2006139208A5 (ja) | ||
| JP2002244667A (ja) | 消音システムおよび電子機器 | |
| JPH10171469A (ja) | 電気機器の消音装置 | |
| CN119321605A (zh) | 空调的控制方法、装置和设备 | |
| JPH10171468A (ja) | 電気機器の消音装置 | |
| JPH06124092A (ja) | 空気調和機の消音装置 | |
| JPH06348282A (ja) | 消音装置 | |
| JP2840525B2 (ja) | 空気調和機 | |
| JPH0343699A (ja) | ファンの周期性騒音の消音装置 | |
| JPH07253788A (ja) | 能動騒音低減装置 | |
| JP2004050859A (ja) | 車両用騒音制御装置 | |
| JP2004341056A (ja) | 能動消音装置 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A521 | Written amendment |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20070827 |
|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20070827 |
|
| A711 | Notification of change in applicant |
Free format text: JAPANESE INTERMEDIATE CODE: A712 Effective date: 20080528 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20100416 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20100427 |
|
| A521 | Written amendment |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20100625 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20100803 |
|
| A02 | Decision of refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A02 Effective date: 20101207 |