JP2005353839A - ボンディング装置 - Google Patents
ボンディング装置 Download PDFInfo
- Publication number
- JP2005353839A JP2005353839A JP2004172895A JP2004172895A JP2005353839A JP 2005353839 A JP2005353839 A JP 2005353839A JP 2004172895 A JP2004172895 A JP 2004172895A JP 2004172895 A JP2004172895 A JP 2004172895A JP 2005353839 A JP2005353839 A JP 2005353839A
- Authority
- JP
- Japan
- Prior art keywords
- motor
- moving table
- axis
- bonding apparatus
- mover
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Pending
Links
Images




Classifications
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B23—MACHINE TOOLS; METAL-WORKING NOT OTHERWISE PROVIDED FOR
- B23K—SOLDERING OR UNSOLDERING; WELDING; CLADDING OR PLATING BY SOLDERING OR WELDING; CUTTING BY APPLYING HEAT LOCALLY, e.g. FLAME CUTTING; WORKING BY LASER BEAM
- B23K20/00—Non-electric welding by applying impact or other pressure, with or without the application of heat, e.g. cladding or plating
- B23K20/002—Non-electric welding by applying impact or other pressure, with or without the application of heat, e.g. cladding or plating specially adapted for particular articles or work
- B23K20/004—Wire welding
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B23—MACHINE TOOLS; METAL-WORKING NOT OTHERWISE PROVIDED FOR
- B23K—SOLDERING OR UNSOLDERING; WELDING; CLADDING OR PLATING BY SOLDERING OR WELDING; CUTTING BY APPLYING HEAT LOCALLY, e.g. FLAME CUTTING; WORKING BY LASER BEAM
- B23K20/00—Non-electric welding by applying impact or other pressure, with or without the application of heat, e.g. cladding or plating
- B23K20/002—Non-electric welding by applying impact or other pressure, with or without the application of heat, e.g. cladding or plating specially adapted for particular articles or work
- B23K20/004—Wire welding
- B23K20/005—Capillary welding
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B23—MACHINE TOOLS; METAL-WORKING NOT OTHERWISE PROVIDED FOR
- B23K—SOLDERING OR UNSOLDERING; WELDING; CLADDING OR PLATING BY SOLDERING OR WELDING; CUTTING BY APPLYING HEAT LOCALLY, e.g. FLAME CUTTING; WORKING BY LASER BEAM
- B23K37/00—Auxiliary devices or processes, not specially adapted to a procedure covered by only one of the preceding main groups
- B23K37/02—Carriages for supporting the welding or cutting element
- B23K37/0247—Driving means
-
- H—ELECTRICITY
- H01—ELECTRIC ELEMENTS
- H01L—SEMICONDUCTOR DEVICES NOT COVERED BY CLASS H10
- H01L24/00—Arrangements for connecting or disconnecting semiconductor or solid-state bodies; Methods or apparatus related thereto
- H01L24/74—Apparatus for manufacturing arrangements for connecting or disconnecting semiconductor or solid-state bodies
- H01L24/78—Apparatus for connecting with wire connectors
-
- H—ELECTRICITY
- H01—ELECTRIC ELEMENTS
- H01L—SEMICONDUCTOR DEVICES NOT COVERED BY CLASS H10
- H01L2224/00—Indexing scheme for arrangements for connecting or disconnecting semiconductor or solid-state bodies and methods related thereto as covered by H01L24/00
- H01L2224/74—Apparatus for manufacturing arrangements for connecting or disconnecting semiconductor or solid-state bodies and for methods related thereto
- H01L2224/78—Apparatus for connecting with wire connectors
-
- H—ELECTRICITY
- H01—ELECTRIC ELEMENTS
- H01L—SEMICONDUCTOR DEVICES NOT COVERED BY CLASS H10
- H01L2924/00—Indexing scheme for arrangements or methods for connecting or disconnecting semiconductor or solid-state bodies as covered by H01L24/00
- H01L2924/0001—Technical content checked by a classifier
- H01L2924/00014—Technical content checked by a classifier the subject-matter covered by the group, the symbol of which is combined with the symbol of this group, being disclosed without further technical details
-
- H—ELECTRICITY
- H01—ELECTRIC ELEMENTS
- H01L—SEMICONDUCTOR DEVICES NOT COVERED BY CLASS H10
- H01L2924/00—Indexing scheme for arrangements or methods for connecting or disconnecting semiconductor or solid-state bodies as covered by H01L24/00
- H01L2924/01—Chemical elements
- H01L2924/01006—Carbon [C]
-
- H—ELECTRICITY
- H01—ELECTRIC ELEMENTS
- H01L—SEMICONDUCTOR DEVICES NOT COVERED BY CLASS H10
- H01L2924/00—Indexing scheme for arrangements or methods for connecting or disconnecting semiconductor or solid-state bodies as covered by H01L24/00
- H01L2924/01—Chemical elements
- H01L2924/01033—Arsenic [As]
Landscapes
- Engineering & Computer Science (AREA)
- Mechanical Engineering (AREA)
- Physics & Mathematics (AREA)
- Optics & Photonics (AREA)
- Manufacturing & Machinery (AREA)
- Computer Hardware Design (AREA)
- Microelectronics & Electronic Packaging (AREA)
- Power Engineering (AREA)
- Wire Bonding (AREA)
- Die Bonding (AREA)
- Machine Tool Units (AREA)
Abstract
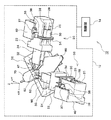
【解決手段】ボンディング装置10は、ほぼ同じ構成のXモータ部20及びYモータ部50と、これらにXY平面で移動可能な移動テーブル60を含む。移動テーブル60には、回転可能なジョイント機構42,52でXモータ部20及びYモータ部50が接続される。Xモータ部20及びYモータ部50において、可動子24の可動コイル30は軸支機構36によりZ軸周りに回転可能に軸支され、軸支機構36はガイドレール38とリニアガイド37からなる案内機構により、軸方向に直動可能に案内される。
【選択図】図1
Description
Claims (6)
- Xモータの駆動とYモータの駆動とによってベース上でXY平面内を任意に移動可能な移動テーブルと、移動テーブルに搭載されるボンディングヘッド部とを含むボンディング装置であって、
Xモータは、
ベースに配置されるX固定子と、
先端が移動テーブルに設けられるXジョイント部に軸支され、X固定子と協働しX方向へ駆動されるX可動子と、
X可動子をZ軸周りに回転可能に軸支するX軸支部と、
X軸支部をX軸方向に直動可能に案内することで、X軸支部を介しX可動子を回転可能に軸支しつつ直動可能に案内するX案内部と、
を有し、
Yモータは、
ベースに配置されるY固定子と、
先端が移動テーブルに設けられYジョイント部に軸支され、Y固定子と協働しY方向へ駆動されるX可動子と、
Y可動子をZ軸周りに回転可能に軸支するY軸支部と、
Y軸支部をY軸方向に直動可能に案内することで、Y軸支部を介しY可動子を回転可能に軸支しつつ直動可能に案内するY案内部と、
を有することを特徴とするボンディング装置。 - 請求項1に記載のボンディング装置において、
Xジョイント部、Yジョイント部、X軸支部、Y軸支部の中の少なくとも1つは、
2枚の板ばねを互いに略直交方向に配置し、回転方向のみに自由度を与えるように、各板ばねの両端部を軸支対象の2つの対象物にそれぞれ接続する軸支機構を有することを特徴とするボンディング装置。 - 請求項1に記載のボンディング装置において、
ベースに対する移動テーブルの回転を規制する回転規制機構を含むことを特徴とするボンディング装置。 - 請求項1に記載のボンディング装置において、
ベースに対し、移動テーブルを流体支持する流体支持機構を含むことを特徴とするボンディング装置。 - 請求項1に記載のボンディング装置において、
Xジョイント部及びYジョイント部は、ボンディングヘッド部を含む移動テーブルの略重心位置に設けられることを特徴とするボンディング装置。 - 請求項1に記載のボンディング装置において、
XY平面内におけるボンディングヘッド部の中立位置の軸方向に対し、Xモータの軸方向は略+45度の傾きを有し、Yモータの軸方向は略−45度の傾きを有することを特徴とするボンディング装置。
Priority Applications (4)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2004172895A JP2005353839A (ja) | 2004-06-10 | 2004-06-10 | ボンディング装置 |
| TW094112334A TW200603298A (en) | 2004-06-10 | 2005-04-19 | Bonding equipment |
| KR1020050039663A KR100648492B1 (ko) | 2004-06-10 | 2005-05-12 | 본딩 장치 |
| US11/150,415 US20050274771A1 (en) | 2004-06-10 | 2005-06-10 | Bonding apparatus |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2004172895A JP2005353839A (ja) | 2004-06-10 | 2004-06-10 | ボンディング装置 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2005353839A true JP2005353839A (ja) | 2005-12-22 |
| JP2005353839A5 JP2005353839A5 (ja) | 2006-09-21 |
Family
ID=35459461
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2004172895A Pending JP2005353839A (ja) | 2004-06-10 | 2004-06-10 | ボンディング装置 |
Country Status (4)
| Country | Link |
|---|---|
| US (1) | US20050274771A1 (ja) |
| JP (1) | JP2005353839A (ja) |
| KR (1) | KR100648492B1 (ja) |
| TW (1) | TW200603298A (ja) |
Families Citing this family (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2013026268A (ja) * | 2011-07-15 | 2013-02-04 | Hitachi High-Tech Instruments Co Ltd | 2軸駆動機構及びダイボンダ |
| CN103624192B (zh) * | 2013-11-07 | 2015-09-02 | 深圳市综科邦达机电设备有限公司 | 焊线机 |
| CN103612036B (zh) * | 2013-11-13 | 2015-06-17 | 深圳市综科邦达机电设备有限公司 | 焊线机 |
Family Cites Families (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CH636740A5 (fr) * | 1980-05-19 | 1983-06-15 | Far Fab Assortiments Reunies | Dispositif pour l'alignement d'une piece et d'un substrat. |
| JPH1110467A (ja) * | 1997-06-18 | 1999-01-19 | Yaskawa Electric Corp | Xyテーブル |
| JP3454234B2 (ja) * | 1999-09-27 | 2003-10-06 | 日産自動車株式会社 | 分割コアモータ |
| JP4018057B2 (ja) * | 2003-03-31 | 2007-12-05 | 株式会社新川 | ボンディング装置 |
-
2004
- 2004-06-10 JP JP2004172895A patent/JP2005353839A/ja active Pending
-
2005
- 2005-04-19 TW TW094112334A patent/TW200603298A/zh unknown
- 2005-05-12 KR KR1020050039663A patent/KR100648492B1/ko not_active IP Right Cessation
- 2005-06-10 US US11/150,415 patent/US20050274771A1/en not_active Abandoned
Also Published As
| Publication number | Publication date |
|---|---|
| KR20060047805A (ko) | 2006-05-18 |
| US20050274771A1 (en) | 2005-12-15 |
| TW200603298A (en) | 2006-01-16 |
| KR100648492B1 (ko) | 2006-11-27 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| KR20090110238A (ko) | 스크라이브 장치 및 다축 스크라이브 장치 | |
| US8008815B2 (en) | Planar stage moving apparatus for machine | |
| US6881918B2 (en) | Electric discharge machining apparatus | |
| JP4018057B2 (ja) | ボンディング装置 | |
| KR100648492B1 (ko) | 본딩 장치 | |
| JP4021158B2 (ja) | 半導体製造装置におけるxyテーブル | |
| EP3246614A1 (en) | Movable table system | |
| JPH11511319A (ja) | 単一平面内において直交運動を行わせるためのモーターシステム | |
| JP3993157B2 (ja) | ボンディング装置 | |
| KR100504027B1 (ko) | 본딩장치 | |
| US20090045244A1 (en) | Wire bonding apparatus comprising rotary positioning stage | |
| JP2005218203A (ja) | アクチュエータ及びボンディング装置 | |
| JP2014065123A (ja) | パラレルリンクロボット | |
| JP4591050B2 (ja) | 直動ステージ装置 | |
| JP2003028973A (ja) | ステージ装置 | |
| JP2012114359A (ja) | Xyステージ | |
| JP2005218202A (ja) | アクチュエータ及びボンディング装置 | |
| JPH1199422A (ja) | 工作機械 | |
| JP3275872B2 (ja) | 可動ステージ装置 | |
| JP5407277B2 (ja) | Xyステージ装置 | |
| KR19990070384A (ko) | 6축 초정밀 위치결정기구 | |
| JP2952458B2 (ja) | Xyステージ装置 | |
| JP4636034B2 (ja) | 可動テーブルの制御装置およびそれを備えた可動テーブル装置 | |
| JPH10277769A (ja) | レーザ加工機の駆動方法およびその装置 | |
| JP2004160569A (ja) | ワイヤ放電加工機 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A521 | Written amendment |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20060804 |
|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20060804 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20080707 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20090602 |
|
| A02 | Decision of refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A02 Effective date: 20091020 |