図1は、この実施例に係る水中スクータの平面図である。また、図2は、図1に示す水中スクータの左側面図であり、図3は、図1に示す水中スクータの正面図である。
図1から図3において、符号10は水中スクータを示す。先ず、水中スクータ10の構成について概説すると、水中スクータ10は、円筒状に形成されてその長手方向が水中スクータ10の進行方向に対して平行となるように配置されたメインフレーム12と、メインフレーム12において進行方向前方に配置された卵型の水密(気密)容器14と、水密容器14の内部に収容されたエンジン(図1から図3で図示せず)と、メインフレーム12において進行方向後方に配置され、エンジンで駆動されて回転して水中スクータ10を推進させるプロペラ16と、メインフレーム12の内部に挿通されてエンジンの出力をプロペラ16に伝達するドライブシャフト(図1から図3で図示せず)と、水中スクータ10の航行深度の調整を行う深度調整機構18と、水中スクータ10の進行方向を調整する操舵機構20と、メインフレーム12において水密容器14とプロペラ16の間に配置された第1のエアタンク22と第2のエアタンク24を備える。
次いで、上記した各構成について詳説する。
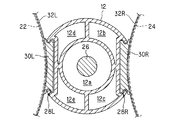
図4は、図1のIV−IV線拡大断面図である。図示の如く、メインフレーム12の内部は区画壁によって分割され、5つの通路が形成される。各通路は、メインフレーム12の先端から後端まで連続する1つの空間として形成される。5つの通路のうち、中心に位置する円筒状の第1の通路12aには、前記したドライブシャフト(符号26で示す)が挿通される。これに対し、第1の通路12aの外周を分割して形成された第2から第5の通路12b,12c,12d,12eは、後述の如く、空気や排出ガスの流路となる。
メインフレーム12の両側面には、断面視において略Cの字状(あるいはその左右対称の断面形状)を呈する溝部28L,28Rが形成される。図2に示すように、溝部28L(およびその裏面に位置する溝部28R)は、メインフレーム12の長手方向(進行方向)に所定の長さを有するように形成される。
図4の説明を続けると、左右の溝部28L,28Rには、それぞれ断面視において略Hの字状を呈するスライダ30L,30Rがスライド自在に嵌められる。即ち、スライダ30L,30Rは、溝部28L,28Rの上端と下端に形成された突起をレールとして、スライド自在に構成される。
スライダ30L,30Rには、それぞれベルト32L,32Rが設けられる。前記した第1のエアタンク22と第2のエアタンク24は、ベルト32L,32Rを介してそれぞれスライダ30L,30Rに装着される。これにより、第1のエアタンク22と第2のエアタンク24は、メインフレーム12の長手方向(即ち、水中スクータ10の進行方向)にスライド自在に装着される。
図1から図3の説明に戻ると、第1のエアタンク22は、バルブ36を介してレギュレータ38に接続される。レギュレータ38は、ホース40を介してメインフレーム12の内部(具体的には第2の通路12b)に接続される。一方、第2のエアタンク24は、バルブ42を介してレギュレータ44に接続される。レギュレータ44は、ホース46を介してメインフレーム12の内部(具体的には、第3の通路12c)に接続される。尚、第1および第2のエアタンク22,24の容積は、例えば12リットル程度であり、その内部には空気が高圧(例えば200気圧程度)に圧縮されて封入される。
第1のエアタンク22に封入された空気は、レギュレータ38で所定の圧力(例えば10気圧程度)まで減圧された後、ホース40を介してメインフレーム12の第2の通路12bに供給される。一方、第2のエアタンク24に封入された空気は、レギュレータ44で前記した所定の圧力(10気圧程度)まで減圧された後、ホース46を介してメインフレーム12の第3の通路12cに供給される。
図5は、図1のV−V線拡大断面図である。また、図6は、図2のVI−VI線拡大断面図である。
図5および図6に示すように、水密容器14は、進行方向前方からバンパー14a、燃料タンク14bおよびエンジン収容部14cの3つの部材から構成される。
エンジン収容部14cには、エンジンEが収容される。エンジンEは、例えば排気量30cc程度の単気筒火花点火式ガソリンエンジンである。また、エンジン収容部14cの上部には、上方へと突出するシュノーケル48が設けられ、かかるシュノーケル48を介してエンジン収容部14cの内部と外部(大気)とが連通される。
エンジン収容部14cの前方には、ボルト50によって燃料タンク14bが取り付けられ、燃料タンク14bには、エンジンEに供給されるべきガソリン燃料が貯留される。また、燃料タンク14bの前面には給油口52が穿設され、給油口52は、キャップ54によって封止される。
燃料タンク14bの前方には、前記キャップ54を被覆するようにバンパー14aが取り付けられる。バンパー14aは、水中スクータ10が外部と衝突したときに変形して衝撃を緩和できるように、他の部材よりも硬度の小さい材料で形成される。また、バンパー14aは、燃料タンク14bへのガソリン燃料の供給を容易に行うことができるように、工具を使用することなく着脱自在とされる。
また、エンジン収容部14cの後方には、ボルト56によって接続部材60が取り付けられる。接続部材60は、メインフレーム12の直径と略同径の内径を有する円筒部60aを備える。
図7は、図5のVII−VII線拡大断面図である。図7に示すように、メインフレーム12の先端付近には、ナット62が収容される。図5から図7に示すように、接続部材60の円筒部60aにメインフレーム12の先端を挿入し、ちょうボルト64をナット62に螺合させることにより、メインフレーム12の前方に接続部材60を介して水密容器14が取り付けられる。尚、ナット62は、図7に示す如く周囲を区画壁で囲われ、その回転が抑止される。
図5および図6の説明に戻ると、メインフレーム12の第2の通路12bは、接続部材60に形成された連通路60b(図6に示す)を介し、水密容器14内に配置されたレギュレータ68に接続される。また、第3の通路12cは、接続部材60の内部に形成された連通路(図示せず)と水密容器14内に設けられた流路70を介し、水密容器14の外部へと連続するホース72に接続される。ホース72の先端には、レギュレータ74が接続され、レギュレータ74には、さらにマウスピース76(いずれも図1および図2に示す)が接続される。
また、メインフレーム12の第4の通路12dは、接続部材60に形成された連通路60cを介してエンジンEの排気管78に接続される。尚、図示は省略するが、第5の通路12eは、接続部材60に形成された連通路を介して水密容器14の内部と連通される。
エンジンEは、図示しない吸気管を備える。吸気管の入口付近にはエアフィルタが設けられると共に、その下流にはスロットルボディ(いずれも図示せず)が配置される。スロットルボディにはスロットルバルブが収容されると共に、その上流側にはキャブレタ・アシー(いずれも図示せず)が設けられる。キャブレタ・アシーには燃料管80(図5に示す)が接続される。燃料管80は燃料タンク14bの内部に連通されると共に、その先端には燃料ポンプ82が接続される。
また、エンジンEのクランクシャフトES(図5に示す)の一端には、遠心クラッチ84が接続される。遠心クラッチ84の出力側は減速機構86に接続され、減速機構86の出力側はドライブシャフト26の前端に接続される。尚、水中スクータ10にはエンジンEの回転数を調節する図示しないスロットル装置が設けられ、遠心クラッチ84は、エンジンEの回転数が上昇させられたときにその動力を伝達する。
一方、クランクシャフトESの他端には、リコイルスタータ88が取り付けられる。リコイルスタータ88のスタータロープ90は、シュノーケル48の内部に挿通されると共に、その先端にはスタータグリップ92が設けられる。スタータグリップ92は、シュノーケル48の上端に着脱自在に構成される。具体的には、スタータグリップ92は、シュノーケル48の上端にその開口部を水密に封止するように装着されると共に、前記上端から取り外し自在に構成される。即ち、エンジンEを始動させる際はシュノーケル48の上端からスタータグリップ92を取り外し、スタータロープ90を引き出す。エンジンEを始動した後は、シュノーケル48から水が浸入するのを防止すべく、シュノーケル48の上端にスタータグリップ92を取り付けてその開口部を封止する。
図8は、シュノーケル48の上端付近の拡大図であり、図9は図8のIX−IX線断面図である。図8および図9に示す如く、シュノーケル48の上端には、取り外したスタータグリップ92(図9に破線で示す)を係止すべき切り欠き部48aが設けられる。
ここで、第1のエアタンク22から所定の圧力に減圧されてメインフレーム12の第2の通路12bに供給された空気は、連通路60bを介してレギュレータ68に供給されると共に、レギュレータ68で水密容器14の内圧まで減圧された後、水密容器14の内部(具体的にはエンジン収容部14c)に供給される。
水密容器14に供給された空気は、エアフィルタを介して吸気管に吸入される。キャブレタ・アシーは、吸入された空気にガソリン燃料を噴射して混合気を生成する。生成された混合気は、エンジンEの燃焼室(図示せず)に吸入されて燃焼させられる。混合気の燃焼によって生じた排出ガスは、排気管78および連通路60cを介してメインフレーム12の第4の通路12dに流入する。
一方、第2のエアタンク24から所定の圧力に減圧されてメインフレーム12の第3の通路12cに供給された空気は、前記した連通路と流路70、さらにはホース72を介してレギュレータ74に供給される。レギュレータ74は、図示しないダイヤフラムなどを備え、マウスピース76を咥えた操縦者(ダイバー)によって吸気動作が行われたとき、周囲の水圧まで減圧した空気を操縦者に供給する。
このように、水中スクータ10にあっては、メインフレーム12に第1のエアタンク22を取り付け、第1のエアタンク22に封入された空気をエンジンEの燃焼用の空気として供給するようにした。また、メインフレーム12に第2のエアタンク24を取り付け、第2のエアタンク24に封入された空気を操縦者の呼吸用の空気として供給するようにした。
図10は、図1のX−X線拡大断面図である。
図10に示す如く、第1の通路12aに挿通されたドライブシャフト26の後端には、プロペラ16が取り付けられる。即ち、水中スクータ10は、メインフレーム12の前方に配置されたエンジンEの出力を前記した遠心クラッチ84、減速機構86およびメインフレーム12の内部に挿通されたドライブシャフト26を介してメインフレーム12の後方に配置されたプロペラ16に伝達し、よってプロペラ16を駆動して水上または水中を航行する。
また、メインフレーム12の第4の通路12dの後端には、第1のワンウェイチェックバルブ94が配置される。第1のワンウェイチェックバルブ94は、排出ガスが第4の通路12dに流入してその内圧が所定の圧力を上回ったときに開弁し、第4の通路12dを外部(水中)に連通させる。即ち、エンジンEから排出された排出ガスは、排気管78、連通路60c、メインフレーム12の第4の通路12dおよび第1のワンウェイチェックバルブ94を介して水中スクータ10の後方(外部)へと排出される。
さらに、メインフレーム12の第5の通路12eの後端には、第2のワンウェイチェックバルブ96が配置される。第2のワンウェイチェックバルブ96は、第5の通路12eの内圧(別言すれば、第5の通路12eに連通された水密容器14の内圧)が所定の圧力を上回ったときに開弁し、第5の通路12eを外部(水中)に連通させる。即ち、エンジンEの発熱などによって水密容器14の内圧が上昇すると、水密容器14内の空気が、接続部材60に形成された連通路、メインフレーム12の第5の通路12eおよび第2のワンウェイチェックバルブ96を介して水中スクータ10の後方(外部)へと排出され、よって水密容器14の内圧が調整(減圧)される。
上記の如く、メインフレーム12に形成された第1の通路12aは、ドライブシャフト26の挿通路となる。また、第2の通路12bは、エンジンEに供給されるべき燃焼用空気の流路となり、第3の通路12cは、操縦者に供給されるべき呼吸用空気の流路となる。さらに、第4の通路12dは、エンジンEから排出された排出ガスの流路となり、第5の通路12eは、水密容器14内の空気を外部に排出してその内圧を調整するための連通路となる。
尚、図示は省略するが、第2の通路12bと第3の通路12cは、メインフレーム12の後端において封止される。第2の通路12bと第3の通路12cをメインフレーム12の後端で封止するのは、メインフレーム12の前端から後端に空気を充満させ、メインフレーム12全体に均等な浮力を与えるためである。第4の通路12dと第5の通路12eにおいて各ワンウェイチェックバルブをそれらの後端に配置したのも、同様な理由からである。
図1から図3の説明に戻ると、メインフレーム12の前方(上記した第1および第2のエアタンク22,24よりも前方)には、深度調整機構18が配置される。
深度調整機構18は、左右のバー100L,100Rと、円筒状の左右のグリップ102L,102Rと、上面視略台形のプレートからなる左右のエレベータ104L,104Rと、グリップ102L,102Rをエレベータ104L,104Rに接続する接続部材106L,106Rなどからなる。
深度調整機構18について具体的に説明すると、左右のバー100L,100Rは、図3に示す如く、水密容器14の下部から側方にかけてその外形に沿うように湾曲させられた湾曲部100aL,100aRと、湾曲部100aL,100aRに連続すると共に、水密容器14の側方(水中スクータ10の左右方向)へと水平に突出させられた直線部100bL,100bRとからなる。
図11は、水密容器14の底面図である。
左右のバー100L,100Rの一端(湾曲部100aL,100aR側の端部)は、図3および図11に示すように、揺動機構108を介して水密容器14に取り付けられる。揺動機構108は、左右のバー100L,100Rの一端が取り付けられるプレート108aと、上下軸回りに回転自在な回転軸(後述)と、プレート108aを前記回転軸に固定するボルト108bとからなる。
図5に示すように、水密容器14の下部には上記した回転軸(符号108cで示す)が設けられ、その下端にはボルト108bによってプレート108aが取り付けられる。これにより、左右のバー100L,100Rは、それらの一端を中心として上下軸回りに揺動自在とされる。
また、左右のバー100L,100Rの他端(直線部100bL,100bR側の端部)には、図1から図3に示す如く、左右のグリップ102L,102Rが取り付けられる。尚、左右のグリップ102L,102Rは、それぞれバー100L,100Rを中心として回転(具体的には自転)自在に取り付けられる。
左右のグリップ102L,102Rには、それぞれ接続部材106L,106Rを介してエレベータ104L,104Rが接続される。これにより、エレベータ104L,104Rは、水密容器14の両側に配置されると共に、水中スクータ10の左右軸回りに揺動自在とされる。即ち、グリップ102L,102Rを回転させることにより、水密容器14の両側に配置されたエレベータ104L,104Rを左右軸回りに揺動させてその傾きの大きさと方向を変更することができ、よってエレベータ104L,104Rに作用する揚力(水中スクータ10を潜行あるいは浮上させる力)を調整することができる。
また、右側のバー100Rの適宜位置には、エマージェンシスイッチ110が設けられる。エマージェンシスイッチ110には、そのオン、オフのトリガーとなるエマージェンシコード112(図1および図3に示す)の一端が取り付けられる。エマージェンシコード112の他端は、後述する如く、操縦者の腕に取り付けられる。
図1から図3の説明を続けると、メインフレーム12の後方(第1および第2のエアタンク22,24よりも後方)には、操舵機構20が配置される。操舵機構20は、ラダー116と、ラダー116をメインフレーム12の後端に接続する接続部材118とからなる。
操舵機構20について具体的に説明すると、接続部材118は、メインフレーム12の直径と略同径の内径を有する円筒部118aを備える。図10に良く示すように、かかる円筒部118aにメインフレーム12の後端を挿入し、ちょうボルト120をメインフレーム12の内部に収容されたナット122に螺合させることにより、メインフレーム12に接続部材118、別言すれば、操舵機構20が取り付けられる。尚、図示は省略するが、ナット122も前述のナット62と同様に周囲を区画壁で囲われ、その回転が抑止される。
接続部材118は、前記円筒部118aに連続する上下左右の計4枚の翼部118bを備える。翼部118bは、プロペラ16との接触を上下方向あるいは左右方向に回避するように形成されると共に、それらの後端は、プロペラ16よりも後方に位置させられる。上記したラダー116は、翼部118bの中、上下に配置された2枚の翼部の後端に上下軸回りに揺動自在に支持される。尚、図で符号124は、操縦者の足が載置されるべきフットスタンドを示す。
ここで、深度調整機構18と操舵機構20は、図1から図3などに示すように、揺動角変位伝達機構130を介して機械的に接続される。揺動角変位伝達機構130は、2本のワイヤ132L,132Rと、転舵輪134とからなる。
以下、揺動角変位伝達機構130について具体的に説明すると、転舵輪134は、ラダー116の下端に取り付けられる。
また、進行方向に向かって左側に配置されるワイヤ132Lは、その一端が深度調整機構18において左側のバー100Lに接続されると共に、他端が前記転舵輪134に接続される。同様に、進行方向に向かって右側に配置されるワイヤ132Rは、その一端が深度調整機構18において右側のバー100Rに接続されると共に、他端が転舵輪134に接続される。
これにより、深度調整機構18の上下軸回りの揺動角変位が、操舵機構20に伝達される。具体的には、図12と図13に示すように、左右のバー100L,100Rを上下軸回りに揺動させることにより、ワイヤ132L,132Rを介して転舵輪134が回転させられ、よってラダー116が揺動させられる。尚、各ワイヤ132L,132Rは、深度調整機構18側においてそれぞれバー100L,100R、即ち、左右軸回りの揺動を生じない部位(上下軸回りの揺動のみ行われる部位)に接続されることから、エレベータ104L,104Rを左右軸回りに揺動させても、その揺動角変位がラダー116に伝達されることはない。
図14は、水中スクータ10と、それに騎乗した操縦者を示す左側面図である。
図14に示すように、操縦者OPは、第1のエアタンク22と第2のエアタンク24の上に騎乗する。具体的には、操縦者OPは、メインフレーム12を跨ぐようにして第1のエアタンク22と第2のエアタンク24に着座する。そして、前傾姿勢をとって前方に位置する左右のグリップ102L,102Rを把持すると共に、後方に位置するフットスタンド124の載置部124aに足を載置する、具体的には、足の甲を係止させる。尚、載置部124aは、図1に示すように、平面視において環状を呈する。
このとき、操縦者OPの腰部は、前記したスライダ30L,30Rに取り付けられたウェストホルダ142に支持される。また、操縦者OPの膝裏は、メインフレーム12に取り付けられたフットホルダ144に支持される。尚、フットホルダ144は、前述した接続部材60などと同様に、メインフレーム12の内部に収容されてその回転が抑止されたナット(図示せず)とちょうボルト146を螺合させることによって取り付けられる。
また、操縦者OPの腕には、前述したエマージェンシコード112(図14で図示省略)の他端が装着される。これにより、操縦者OPが水中スクータ10から離脱したときにエマージェンシコード112の一端がエマージェンシスイッチ110から引き抜かれ、緊急停止信号が送出されてエンジンEが停止させられる。
次いで、操縦者OPによる水中スクータ10の操縦、具体的には、航行深度と進行方向の調整について説明する。
先ず、水中スクータ10を潜行させるときは、図15に示す如く、左右のエレベータ104L,104Rの前端を後端よりも下方に位置させるように左右のグリップ102L,102Rを回転させる。この状態で水中スクータ10を前進させることにより、左右のエレベータ104L,104Rには下向きの力が作用し、よって水中スクータ10が潜行させられる。また、このとき、操縦者OPは騎乗部たる第1および第2のエアタンク22,24を後方へとスライドさせる。即ち、第1および第2のエアタンク22,24の浮力が作用する位置を後方へと移動させる。これにより、水中スクータ10の後方の浮力が大きくなり、水中スクータ10の前方が沈み込む(後方が浮き上がる)ことから、潜行に適した(潜行し易い)姿勢となる。
これに対し、水中スクータ10を浮上させるときは、図16に示す如く、左右のエレベータ104L,104Rの前端を後端よりも上方に位置させるように左右のグリップ102L,102Rを回転させる。この状態で水中スクータ10を前進させることにより、左右のエレベータ104L,104Rには上向きの力が作用し、よって水中スクータ10が浮上させられる。また、このとき、操縦者OPは騎乗部たる第1および第2のエアタンク22,24を前方へとスライドさせる。即ち、第1および第2のエアタンク22,24の浮力が作用する位置を前方へと移動させる。これにより、水中スクータ10の前方の浮力が大きくなり、水中スクータ10の前方が浮き上がる(後方が沈み込む)ことから、浮上に適した(浮上し易い)姿勢となる。
一方、水中スクータ10の進行方向を調整する(操舵する)ときは、グリップ102L,102Rを把持しながらバー100L,100Rを上下軸回りに揺動させることにより、図12と図13で示した如くラダー116を上下軸回りに揺動させる。このように、操縦者OPは、深度調整機構18を操作することによって操舵機構20も操作することができる。換言すれば、操縦者OPの騎乗位置(第1および第2のエアタンク22,24)よりも前方に配置された(即ち、操作性に優れる位置に配置された)深度調整機構18を操作することで、騎乗位置よりも後方に配置された操舵機構20も一体的に操作することができる。
尚、操縦者OPの足が載置されるフットスタンド124は、前記したように操舵機構20に取り付けられることから、例えば急旋回するときや水流抵抗が大きいときなどに、フットスタンド124を足で操作することによって揺動角変位伝達機構130の動作(即ち、腕によるバー100L,100Rの揺動動作)を補助することも可能である。
このように、この実施例に係る水中スクータ10にあっては、操縦者の騎乗部たる第1のエアタンク22と第2のエアタンク24が配置されたメインフレーム12と、第1および第2のエアタンク22,24よりも前方に配置された深度調整機構18と、第1および第2のエアタンク22,24よりも後方に配置された操舵機構20とを備えると共に、深度調整機構18を揺動機構108によって上下軸回りに揺動自在とし、さらにその揺動角変位を揺動角変位伝達機構130によって操舵機構20に伝達してラダー116を上下軸回りに揺動させるようにしたので、水中スクータ10の航行中、操縦者はメインフレーム12に騎乗することができると共に、深度調整機構18と操舵機構20を操作することによって水中スクータ10の航行深度と進行方向を調整できるため、操縦者を牽引するタイプの従来例に比して負担を軽減することができる。
特に、操縦者の騎乗位置(第1および第2のエアタンク22,24)よりも前方の操作性に優れた場所に配置された深度調整機構18を操作することにより、騎乗位置よりも後方に配置された操舵機構20を一体的に操作できるようにしたことから、操作性が向上し、よって航行深度や進行方向の調整に伴う負担を効果的に軽減することができる。
また、揺動角変位伝達機構130を、ラダー116に取り付けられた転舵輪134と、転舵輪134と深度調整機構18を接続するワイヤ132L,132Rとからなるようにしたので、簡素な構成でありながら、深度調整機構18の上下軸回りの揺動角変位をラダー116にスムーズに伝達することができ、操舵感を向上させることができる。
また、騎乗部たる第1および第2のエアタンク22,24を水中スクータ10の進行方向にスライド自在とし、それらの浮力が作用する位置を可変としたことから、水中スクータ10を潜行または浮上に適した姿勢にすることができる。このため、水中スクータ10の深度調整を容易に行うことができ、よって操縦者の負担をより一層効果的に軽減することができる。
以上の如く、この発明の第1実施例にあっては、操縦者(OP)に操縦されて水上または水中を航行する水中スクータ(10)において、前記操縦者(OP)が騎乗すべき騎乗部(第1のエアタンク22、第2のエアタンク24)が配置されたメインフレーム(12)と、少なくとも前記騎乗部(22,24)よりも前記水中スクータ(10)の進行方向において前方に配置された左右軸回りに揺動自在なエレベータ(104L,104R)からなる深度調整機構(18)と、少なくとも前記騎乗部(22,24)よりも前記進行方向において後方に配置された上下軸回りに揺動自在なラダー(116)からなる操舵機構(20)と、前記深度調整機構(18)を上下軸回りに揺動自在とする揺動機構(108)と、および前記深度調整機構(18)の上下軸回りの揺動角変位を前記操舵機構(20)に伝達して前記ラダー(116)を上下軸回りに揺動させる揺動角変位伝達機構(130)とを備えるように構成した。
また、前記揺動角変位伝達機構(130)が、一端が前記深度調整機構(18)に接続されると共に、他端が前記操舵機構(20)に接続されたワイヤ(132L,132R)からなるように構成した。
また、前記揺動角変位伝達機構(130)が、前記ラダー(116)に取り付けられた転舵輪(134)を備えると共に、前記ワイヤ(132L,132R)の他端が、前記転舵輪(134)に接続されるように構成した。
尚、上記において、ワイヤ132L,132Rをメインフレーム12の内部に挿通させるようにしても良い。また、プロペラ16を駆動する駆動源をエンジンEとしたが、電動モータなどであっても良い。
また、水中スクータ10が水上あるいは水面付近を航行するとき(即ち、航行深度が浅く、シュノーケル48の上端が水面より上方に位置するとき)は、シュノーケル48の上端からスタータグリップ92を取り外して前記切り欠き部48aに係止させる(即ち、開口部を封止しないようにする)ことで、外気をエンジンEの燃焼用空気として取り入れるようにしても良い。このとき、第1のエアタンク22に接続されたバルブ36を閉弁し、第1のエアタンク22からの空気の供給を停止することで、タンク内に封入された空気の消費量を低減することができる。
さらに、シュノーケル48とマウスピース76を接続し、水中スクータ10が水上を航行するときは操縦者の呼吸用空気も外部から導入するようにしても良い。このとき、第2のエアタンク24に接続されたバルブ42を閉弁し、第2のエアタンク24からの空気の供給を停止することで、同様に封入された空気の消費量を低減することができる。