JP2005297744A - 水中スクータ - Google Patents
水中スクータ Download PDFInfo
- Publication number
- JP2005297744A JP2005297744A JP2004116158A JP2004116158A JP2005297744A JP 2005297744 A JP2005297744 A JP 2005297744A JP 2004116158 A JP2004116158 A JP 2004116158A JP 2004116158 A JP2004116158 A JP 2004116158A JP 2005297744 A JP2005297744 A JP 2005297744A
- Authority
- JP
- Japan
- Prior art keywords
- elevator
- underwater scooter
- scooter
- air
- swing angle
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Withdrawn
Links
Images






Landscapes
- Automatic Cycles, And Cycles In General (AREA)
Abstract
【課題】航行深度や進行方向の調整に伴う操縦者の負担を軽減するようにした水中スクータを提供する。
【解決手段】前記水中スクータ(10)の進行方向において左側に配置された左右軸回りに揺動自在な左側エレベータ(104L)と、前記水中スクータ(10)の進行方向において右側に配置された左右軸回りに揺動自在な右側エレベータ(104R)とを備えると共に、それらを独立して垂直位置まで揺動自在とし、水中スクータ(10)を操舵するときは左右のエレベータを独立に操作して揺動角を相違させる一方、潜行あるいは浮上させるときは左右のエレベータを同様に操作して揺動角を一致させる。
【選択図】図11
【解決手段】前記水中スクータ(10)の進行方向において左側に配置された左右軸回りに揺動自在な左側エレベータ(104L)と、前記水中スクータ(10)の進行方向において右側に配置された左右軸回りに揺動自在な右側エレベータ(104R)とを備えると共に、それらを独立して垂直位置まで揺動自在とし、水中スクータ(10)を操舵するときは左右のエレベータを独立に操作して揺動角を相違させる一方、潜行あるいは浮上させるときは左右のエレベータを同様に操作して揺動角を一致させる。
【選択図】図11
Description
この発明は、水上または水中を航行する水中スクータに関する。
従来、操縦者(ダイバー)に操縦されて水上または水中を航行する水中スクータが提案されている。この種の水中スクータにあっては、一般に、内燃機関あるいは電動モータを駆動源としてプロペラを駆動することによって推進力を得る。そして、操縦者が把持すべきグリップを備え、かかるグリップを把持した操縦者を牽引することにより、その進行を補助するように構成している(例えば特許文献1参照)。
特公平4−17832号公報
従来技術に係る水中スクータにあっては、航行深度や進行方向を調整する際、操縦者はプロペラの向きを水中スクータごと腕で調整する必要があったため、腕が疲労し易く、負担が大きいという不具合があった。
従って、この発明の目的は上記した課題を解決することにあり、航行深度や進行方向の調整に伴う操縦者の負担を軽減するようにした水中スクータを提供することにある。
上記した課題を解決するために、請求項1にあっては、操縦者に操縦されて水上または水中を航行する水中スクータにおいて、前記水中スクータの進行方向において左側に配置された左右軸回りに揺動自在な左側エレベータと、前記水中スクータの進行方向において右側に配置された左右軸回りに揺動自在な右側エレベータとを備えると共に、前記左側エレベータと前記右側エレベータが、それぞれ独立して垂直位置まで揺動自在とされるように構成した。
また、請求項2にあっては、前記左側エレベータに接続されると共に、前記操縦者に操作されて前記左側エレベータの揺動角を調整する左側操作部と、前記右側エレベータに接続されると共に、前記操縦者に操作されて前記右側エレベータの揺動角を調整する右側操作部と、前記左側操作部に設けられた前記左側エレベータの揺動角を保持する左側エレベータ揺動角保持機構と、および前記右側操作部に設けられた前記右側エレベータの揺動角を保持する右側エレベータ揺動角保持機構とを備えるように構成した。
請求項1に係る水中スクータにあっては、進行方向において左側に配置された左右軸回りに揺動自在な左側エレベータと、進行方向において右側に配置された左右軸回りに揺動自在な右側エレベータとを備えるように構成したので、左右のエレベータを操作することによって水中スクータの航行深度を調整することができる。また、左右のエレベータが、それぞれ独立して垂直位置まで揺動自在とされるように構成したので、それらを独立に操作して揺動角を相違させる(前方への投影面積を相違させる)ことにより、左右のエレベータに作用する水流抵抗(抗力)を相違させることができ、よって水中スクータを操舵することができる。即ち、左右のエレベータを操作することにより、水中スクータの航行深度と進行方向を調整できることから、操作性が向上し、よって航行深度や進行方向の調整に伴う操縦者の負担を軽減することができる。
また、請求項2に係る水中スクータにあっては、さらに、左側エレベータに接続されると共に、操縦者に操作されて左側エレベータの揺動角を調整する左側操作部と、右側エレベータに接続されると共に、操縦者に操作されて右側エレベータの揺動角を調整する右側操作部と、左側操作部に設けられた左側エレベータの揺動角を保持する左側エレベータ揺動角保持機構と、右側操作部に設けられた右側エレベータの揺動角を保持する右側エレベータ揺動角保持機構とを備えるように構成したので、航行深度や進行方向を調整する際、操縦者は自身の力で各エレベータの揺動角を保持する必要がなく、よって航行深度や進行方向の調整に伴う操縦者の負担を一層軽減することができる。
以下、添付図面に即してこの発明に係る水中スクータを実施するための最良の形態について説明する。
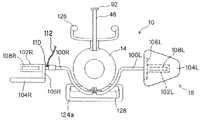
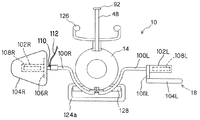
図1は、この実施例に係る水中スクータの平面図である。また、図2は、図1に示す水中スクータの左側面図であり、図3は、図1に示す水中スクータの正面図である。
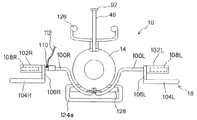
図1から図3において、符号10は水中スクータを示す。先ず、水中スクータ10の構成について概説すると、水中スクータ10は、円筒状に形成されてその長手方向が水中スクータ10の進行方向に対して平行となるように配置されたメインフレーム12と、メインフレーム12において進行方向前方に配置された卵型の水密(気密)容器14と、水密容器14の内部に収容された内燃機関(図1から図3で図示せず。以下「エンジン」という)と、メインフレーム12において進行方向後方に配置され、エンジンで駆動されて回転して水中スクータ10を推進させるプロペラ16と、メインフレーム12の内部に挿通されてエンジンの出力をプロペラ16に伝達するドライブシャフト(図1から図3で図示せず)と、水密容器14の両側に配置された操作機構18と、メインフレーム12において水密容器14とプロペラ16の間に配置された第1のエアタンク22と第2のエアタンク24を備える。
次いで、上記した各構成について詳説する。
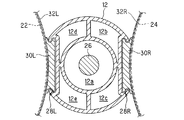
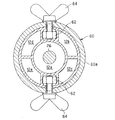
図4は、図1のIV−IV線拡大断面図である。図示の如く、メインフレーム12の内部は区画壁によって分割され、5つの通路が形成される。各通路は、メインフレーム12の先端から後端まで連続する1つの空間として形成される。5つの通路のうち、中心に位置する円筒状の第1の通路12aには、前記したドライブシャフト(符号26で示す)が挿通される。これに対し、第1の通路12aの外周を分割して形成された第2から第5の通路12b,12c,12d,12eは、後述の如く、空気や排出ガスの流路となる。
メインフレーム12の両側面には、断面視において略Cの字状(あるいはその左右対称の断面形状)を呈する溝部28L,28Rが形成される。図2に示すように、溝部28L(およびその裏面に位置する溝部28R)は、メインフレーム12の長手方向(進行方向)に所定の長さを有するように形成される。
図4の説明を続けると、左右の溝部28L,28Rには、それぞれ断面視において略Hの字状を呈するスライダ30L,30Rがスライド自在に嵌められる。即ち、スライダ30L,30Rは、溝部28L,28Rの上端と下端に形成された突起をレールとして、スライド自在に構成される。
スライダ30L,30Rには、それぞれベルト32L,32Rが設けられる。前記した第1のエアタンク22と第2のエアタンク24は、ベルト32L,32Rを介してそれぞれスライダ30L,30Rに装着される。これにより、第1のエアタンク22と第2のエアタンク24は、メインフレーム12の長手方向(即ち、水中スクータ10の進行方向)にスライド自在に装着される。
図1から図3の説明に戻ると、第1のエアタンク22は、バルブ36を介してレギュレータ38に接続される。レギュレータ38は、ホース40を介してメインフレーム12の内部(具体的には第2の通路12b)に接続される。一方、第2のエアタンク24は、バルブ42を介してレギュレータ44に接続される。レギュレータ44は、ホース46を介してメインフレーム12の内部(具体的には、第3の通路12c)に接続される。尚、第1および第2のエアタンク22,24の容積は、例えば12リットル程度であり、その内部には空気が高圧(例えば200気圧程度)に圧縮されて封入される。
第1のエアタンク22に封入された空気は、レギュレータ38で所定の圧力(例えば10気圧程度)まで減圧された後、ホース40を介してメインフレーム12の第2の通路12bに供給される。一方、第2のエアタンク24に封入された空気は、レギュレータ44で前記した所定の圧力(10気圧程度)まで減圧された後、ホース46を介してメインフレーム12の第3の通路12cに供給される。
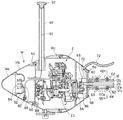
図5は、図1のV−V線拡大断面図である。また、図6は、図2のVI−VI線拡大断面図である。
図5および図6に示すように、水密容器14は、進行方向前方からバンパー14a、燃料タンク14bおよびエンジン収容部14cの3つの部材から構成される。
エンジン収容部14cには、エンジンEが収容される。エンジンEは、例えば排気量30cc程度の単気筒火花点火式ガソリンエンジンである。また、エンジン収容部14cの上部には、上方へと突出するシュノーケル48が設けられ、かかるシュノーケル48を介してエンジン収容部14cの内部と外部(大気)とが連通される。
エンジン収容部14cの前方には、ボルト50によって燃料タンク14bが取り付けられ、燃料タンク14bには、エンジンEに供給されるべきガソリン燃料が貯留される。また、燃料タンク14bの前面には給油口52が穿設され、給油口52は、キャップ54によって封止される。
燃料タンク14bの前方には、前記キャップ54を被覆するようにバンパー14aが取り付けられる。バンパー14aは、水中スクータ10が外部と衝突したときに変形して衝撃を緩和できるように、他の部材よりも硬度の小さい材料で形成される。また、バンパー14aは、燃料タンク14bへのガソリン燃料の供給を容易に行うことができるように、工具を使用することなく着脱自在とされる。
また、エンジン収容部14cの後方には、ボルト56によって接続部材60が取り付けられる。接続部材60は、メインフレーム12の直径と略同径の内径を有する円筒部60aを備える。
図7は、図5のVII−VII線拡大断面図である。図7に示すように、メインフレーム12の先端付近には、ナット62が収容される。図5から図7に示すように、接続部材60の円筒部60aにメインフレーム12の先端を挿入し、ちょうボルト64をナット62に螺合させることにより、メインフレーム12の前方に接続部材60を介して水密容器14が取り付けられる。尚、ナット62は、図7に示す如く周囲を区画壁で囲われ、その回転が抑止される。
図5および図6の説明に戻ると、メインフレーム12の第2の通路12bは、接続部材60に形成された連通路60b(図6に示す)を介し、水密容器14内に配置されたレギュレータ68に接続される。また、第3の通路12cは、接続部材60の内部に形成された連通路(図示せず)と水密容器14内に設けられた流路70を介し、水密容器14の外部へと連続するホース72に接続される。ホース72の先端には、レギュレータ74が接続され、レギュレータ74には、さらにマウスピース76(いずれも図1および図2に示す)が接続される。
また、メインフレーム12の第4の通路12dは、接続部材60に形成された連通路60cを介してエンジンEの排気管78に接続される。尚、図示は省略するが、第5の通路12eは、接続部材60に形成された連通路を介して水密容器14の内部と連通される。
エンジンEは、図示しない吸気管を備える。吸気管の入口付近にはエアフィルタが設けられると共に、その下流にはスロットルボディ(いずれも図示せず)が配置される。スロットルボディにはスロットルバルブが収容されると共に、その上流側にはキャブレタ・アシー(いずれも図示せず)が設けられる。キャブレタ・アシーには燃料管80(図5に示す)が接続される。燃料管80は燃料タンク14bの内部に連通されると共に、その先端には燃料ポンプ82が接続される。
また、エンジンEのクランクシャフトES(図5に示す)の一端には、遠心クラッチ84が接続される。遠心クラッチ84の出力側は減速機構86に接続され、減速機構86の出力側はドライブシャフト26の前端に接続される。尚、水中スクータ10にはエンジンEの回転数を調節する図示しないスロットル装置が設けられ、遠心クラッチ84は、エンジンEの回転数が上昇させられたときにその動力を伝達する。
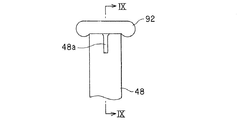
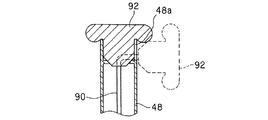
一方、クランクシャフトESの他端には、リコイルスタータ88が取り付けられる。リコイルスタータ88のスタータロープ90は、シュノーケル48の内部に挿通されると共に、その先端にはスタータグリップ92が設けられる。スタータグリップ92は、シュノーケル48の上端に着脱自在に構成される。具体的には、スタータグリップ92は、シュノーケル48の上端にその開口部を水密に封止するように装着されると共に、前記上端から取り外し自在に構成される。即ち、エンジンEを始動させる際はシュノーケル48の上端からスタータグリップ92を取り外し、スタータロープ90を引き出す。エンジンEを始動した後は、シュノーケル48から水が浸入するのを防止すべく、シュノーケル48の上端にスタータグリップ92を取り付けてその開口部を封止する。
図8は、シュノーケル48の上端付近の拡大図であり、図9は図8のIX−IX線断面図である。図8および図9に示す如く、シュノーケル48の上端には、取り外したスタータグリップ92(図9に破線で示す)を係止すべき切り欠き部48aが設けられる。
ここで、第1のエアタンク22から所定の圧力に減圧されてメインフレーム12の第2の通路12bに供給された空気は、連通路60bを介してレギュレータ68に供給されると共に、レギュレータ68で水密容器14の内圧まで減圧された後、水密容器14の内部(具体的にはエンジン収容部14c)に供給される。
水密容器14に供給された空気は、エアフィルタを介して吸気管に吸入される。キャブレタ・アシーは、吸入された空気にガソリン燃料を噴射して混合気を生成する。生成された混合気は、エンジンEの燃焼室(図示せず)に吸入されて燃焼させられる。混合気の燃焼によって生じた排出ガスは、排気管78および連通路60cを介してメインフレーム12の第4の通路12dに流入する。
一方、第2のエアタンク24から所定の圧力に減圧されてメインフレーム12の第3の通路12cに供給された空気は、前記した連通路と流路70、さらにはホース72を介してレギュレータ74に供給される。レギュレータ74は、図示しないダイヤフラムなどを備え、マウスピース76を咥えた操縦者(ダイバー)によって吸気動作が行われたとき、周囲の水圧まで減圧した空気を操縦者に供給する。
このように、水中スクータ10にあっては、メインフレーム12に第1のエアタンク22を取り付け、第1のエアタンク22に封入された空気をエンジンEの燃焼用の空気として供給するようにした。また、メインフレーム12に第2のエアタンク24を取り付け、第2のエアタンク24に封入された空気を操縦者の呼吸用の空気として供給するようにした。
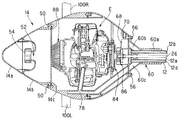
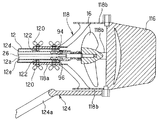
図10は、図1のX−X線拡大断面図である。
図10に示す如く、第1の通路12aに挿通されたドライブシャフト26の後端には、プロペラ16が取り付けられる。即ち、水中スクータ10は、メインフレーム12の前方に配置されたエンジンEの出力を前記した遠心クラッチ84、減速機構86およびメインフレーム12の内部に挿通されたドライブシャフト26を介してメインフレーム12の後方に配置されたプロペラ16に伝達し、よってプロペラ16を駆動して水上または水中を航行する。
また、メインフレーム12の第4の通路12dの後端には、第1のワンウェイチェックバルブ94が配置される。第1のワンウェイチェックバルブ94は、排出ガスが第4の通路12dに流入してその内圧が所定の圧力を上回ったときに開弁し、第4の通路12dを外部(水中)に連通させる。即ち、エンジンEから排出された排出ガスは、排気管78、連通路60c、メインフレーム12の第4の通路12dおよび第1のワンウェイチェックバルブ94を介して水中スクータ10の後方(外部)へと排出される。
さらに、メインフレーム12の第5の通路12eの後端には、第2のワンウェイチェックバルブ96が配置される。第2のワンウェイチェックバルブ96は、第5の通路12eの内圧(別言すれば、第5の通路12eに連通された水密容器14の内圧)が所定の圧力を上回ったときに開弁し、第5の通路12eを外部(水中)に連通させる。即ち、エンジンEの発熱などによって水密容器14の内圧が上昇すると、水密容器14内の空気が、接続部材60に形成された連通路、メインフレーム12の第5の通路12eおよび第2のワンウェイチェックバルブ96を介して水中スクータ10の後方(外部)へと排出され、よって水密容器14の内圧が調整(減圧)される。
上記の如く、メインフレーム12に形成された第1の通路12aは、ドライブシャフト26の挿通路となる。また、第2の通路12bは、エンジンEに供給されるべき燃焼用空気の流路となり、第3の通路12cは、操縦者に供給されるべき呼吸用空気の流路となる。さらに、第4の通路12dは、エンジンEから排出された排出ガスの流路となり、第5の通路12eは、水密容器14内の空気を外部に排出してその内圧を調整するための連通路となる。
尚、図示は省略するが、第2の通路12bと第3の通路12cは、メインフレーム12の後端において封止される。第2の通路12bと第3の通路12cをメインフレーム12の後端で封止するのは、メインフレーム12の前端から後端に空気を充満させ、メインフレーム12全体に均等な浮力を与えるためである。第4の通路12dと第5の通路12eにおいて各ワンウェイチェックバルブをそれらの後端に配置したのも、同様な理由からである。
図1から図3の説明に戻ると、水密容器14には、水中スクータ10の航行深度と進行方向を調整する操作機構18が取り付けられる。操作機構18は、左右のバー100L,100Rと、円筒状の左右のグリップ102L,102R(左側操作部と右側操作部)と、上面視略台形のプレートからなる左右のエレベータ104L,104Rと、グリップ102L,102Rをエレベータ104L,104Rに接続する接続部材106L,106Rと、左右のロック機構108L,108R(左側エレベータ揺動角保持機構と右側エレベータ揺動角保持機構)とからなる。
操作機構18について具体的に説明すると、左右のバー100L,100Rは水密容器14に取り付けられ、その長手方向が水中スクータ10の左右方向に対して平行となるように配置される。左側バー100Lにおいて進行方向に向かって左側の端部には、左側グリップ102Lが取り付けられる。同様に、右側バー100Rにおいて進行方向に向かって右側の端部には、右側グリップ102Rが取り付けられる。尚、左右のグリップ102L,102Rは、それぞれバー100L,100Rを中心として回転(具体的には自転)自在に取り付けられる。
左側グリップ102Lには、左側接続部材106Lを介して左側エレベータ104Lが接続される。また、右側グリップ102Rには、右側接続部材106Rを介して右側エレベータ104Rが接続される。これにより、左右のエレベータ104L,104Rは、それぞれ水中スクータ10の進行方向において左側と右側に配置されると共に、左右軸回りに揺動自在とされる。即ち、左右のグリップ102L,102Rを回転させることにより、水中スクータ10の両側に配置されたエレベータ104L,104Rを左右軸回りに揺動させてその傾きの大きさと方向を変更することができ、よってエレベータ104L,104Rに作用する揚力(水中スクータ10を潜行あるいは浮上させる力)を調整することができる。
尚、左右のエレベータ104L,104Rは、連結されることなく独立して水密容器14に取り付けられることから、それらは独立して揺動させることができる。
従って、図11と図12に示すように、各エレベータ104L,104Rに接続されたグリップ102L,102Rを独立に操作して揺動角を左右で相違させる(エレベータの前方への投影面積を相違させる)ことにより、左右のエレベータ104L,104Rに作用する水流抵抗(抗力)を相違させることができ、よって水中スクータ10を操舵することができる。尚、各エレベータ104L,104Rは、図11と図12に示す如く、それぞれ独立して垂直位置まで揺動自在とされる。
また、左側グリップ102Lには、その回転をロックして左側エレベータ104Lの揺動角を保持する左側ロック機構108Lが設けられると共に、右側グリップ102Rには、その回転をロックして右側エレベータ104Rの揺動角を保持する右側ロック機構108Rが設けられる。
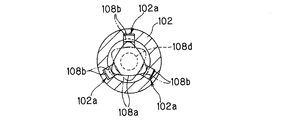
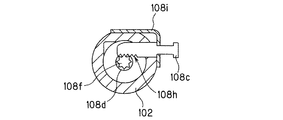
図13は、グリップ102付近の拡大説明図である。また、図14は図13のXIV−XIV線断面図であり、図15は図13のXV−XV線断面図である。以下、図13から図15を参照してロック機構108について説明する。尚、ロック機構108は左右対称であるため、以降の説明では「L」、「R」を付すのを省略する。
図13に示す如く、グリップ102にはロック機構108が設けられる。ロック機構108は、図13から図15に示すように、カム108aと、ラチェット108bと、ロック解除スイッチ108cなどからなる。尚、図13と図14では、ロック時のカム108aとラチェット108bを実線で示し、非ロック時(初期状態)のそれを2点鎖線で示す。
バー100の内部には、軸108dが回転自在に挿通され、軸108dの一端はカム108aに接続されると共に、他端にはギヤ108fが形成される。
バー100の先端には、ラチェット108bとリターンスプリング108gが取り付けられる。ラチェット108bは、グリップ102の回転方向において120度間隔で配置された弾性変形自在な3本の足部と、その先端に設けられた3個の爪部とからなる。また、リターンスプリング108gは、具体的にはねじりコイルバネからなり、その一端がバー100の先端に取り付けられると共に、他端がカム108aに取り付けられる。尚、カム108aは、図14に示す如く丸みを帯びた正三角形を呈し、ラチェット108bの3個の爪部に当接される。
リターンスプリング108gは、カム108aを、その3個の頂点がラチェット108bの3個の爪部に当接する位置に常時付勢する。また、グリップ102の内周には、ラチェット108bの3個の爪部が係止されるべき3個の凹部102aが120度間隔で形成される。従って、操縦者により、ラチェット108bの3個の爪部の直上に3個の凹部102aが位置するまでグリップ102が回転させられると、リターンスプリング108gの付勢力によってカム108aが回転してカム108aの頂部がラチェット108bの各爪部に当接され(換言すれば、ラチェット108bの足部が弾性変形することによって各爪部が押し広げられるように外方へと変位し)、よって各爪部が凹部102aに係止される。これにより、グリップ102の回転がロックされ、エレベータ104の揺動角が保持される。尚、凹部102aなどの位置は、少なくともエレベータ104を垂直位置に保持できる、即ち、揺動角を90度(エレベータ104が水平であるときの揺動角を零度とする)に保持できるように設定される。
次いで、ロックの解除について説明する。図15に示すように、ロック解除スイッチ108cの一端にはギヤ108hが形成され、ギヤ108hは、グリップ102の内部において前記したギヤ108fに噛合される。また、ロック解除スイッチ108cの他端はグリップ102の外部に突出され、操縦者によって操作自在とされる。尚、ロック解除スイッチ108cは、ハンドル100に取り付けられたステー108iによってグリップ102上の適宜位置に支持される。
操縦者によってロック解除スイッチ108cが操作される(具体的には、リターンスプリング108gの付勢力に抗して押圧される)と、ギヤ108hとギヤ108fを介して軸108dとカム108aが回転させられる。これにより、カム108aの頂部と各爪部との当接が解除され、爪部が初期位置に復帰する。これにより、ラチェット108bの爪部と凹部102aの係止が解除され、グリップ102が回転自在とされる。
図1から図3の説明に戻ると、右側バー100の適宜位置には、エマージェンシスイッチ110が設けられる。エマージェンシスイッチ110には、そのオン、オフのトリガーとなるエマージェンシコード112(図1および図3に示す)の一端が取り付けられる。エマージェンシコード112の他端は、後述する如く、操縦者の腕に取り付けられる。
一方、メインフレーム12の後端には、尾翼116が接続部材118を介して取り付けられる。
接続部材118は、プロペラシャフトケース94の直径と略同径の内径を有する円筒部118aを備える。図10に良く示すように、かかる円筒部118aにプロペラシャフトケース94の後端を挿入し、ちょうボルト120をプロペラシャフトケース94の内部に収容されたナット122に螺合させることにより、プロペラシャフトケース94に接続部材118が取り付けられる。尚、図示は省略するが、ナット122も前述のナット62と同様に周囲を区画壁で囲われ、その回転が抑止される。
接続部材118は、前記円筒部118aに連続する上下左右の計4枚の翼部118bを備える。翼部118bは、プロペラ16との接触を上下方向あるいは左右方向に回避するように形成されると共に、それらの後端は、プロペラ16よりも後方に位置させられる。上記した尾翼116は、翼部118bの中、上下に配置された2枚の翼部の後端に支持される。尚、図で符号124は、操縦者の足が載置されるべきフットスタンドを示す。
図16は、水中スクータ10と、それに騎乗した操縦者を示す左側面図である。
図16に示すように、操縦者OPは、第1のエアタンク22と第2のエアタンク24の上に騎乗する。具体的には、操縦者OPは、メインフレーム12を跨ぐようにして第1のエアタンク22と第2のエアタンク24に着座する。そして、前傾姿勢をとって前方に位置する左右のグリップ102L,102Rを把持すると共に、後方に位置するフットスタンド124の載置部124aに足を載置する、具体的には、足の甲を係止させる。尚、載置部124aは、図1に示すように、平面視において環状を呈する。
このとき、操縦者OPの腰部は、前記したスライダ30L,30Rに取り付けられたウェストホルダ126に支持される。また、操縦者OPの膝裏は、メインフレーム12に取り付けられたフットホルダ128に支持される。尚、フットホルダ128は、前述した接続部材60などと同様に、メインフレーム12の内部に収容されてその回転が抑止されたナット(図示せず)とちょうボルト130を螺合させることによって取り付けられる。
また、操縦者OPの腕には、前述したエマージェンシコード112(図16で図示省略)の他端が装着される。これにより、操縦者OPが水中スクータ10から離脱したときにエマージェンシコード112の一端がエマージェンシスイッチ110から引き抜かれ、緊急停止信号が送出されてエンジンEが停止させられる。
次いで、操縦者OPによる水中スクータ10の操縦、具体的には、航行深度と進行方向の調整について説明する。
先ず、水中スクータ10を潜行させるときは、図17に示す如く、左右のエレベータ104L,104Rの前端を後端よりも下方に位置させるように左右のグリップ102L,102Rを回転させる。この状態で水中スクータ10を前進させることにより、左右のエレベータ104L,104Rには下向きの力が作用し、よって水中スクータ10が潜行させられる。また、このとき、操縦者OPは騎乗部たる第1および第2のエアタンク22,24を後方へとスライドさせる。即ち、第1および第2のエアタンク22,24の浮力が作用する位置を後方へと移動させる。これにより、水中スクータ10の後方の浮力が大きくなり、水中スクータ10の前方が沈み込む(後方が浮き上がる)ことから、潜行に適した(潜行し易い)姿勢となる。
これに対し、水中スクータ10を浮上させるときは、図18に示す如く、左右のエレベータ104L,104Rの前端を後端よりも上方に位置させるように左右のグリップ102L,102Rを回転させる。この状態で水中スクータ10を前進させることにより、左右のエレベータ104L,104Rには上向きの力が作用し、よって水中スクータ10が浮上させられる。また、このとき、操縦者OPは騎乗部たる第1および第2のエアタンク22,24を前方へとスライドさせる。即ち、第1および第2のエアタンク22,24の浮力が作用する位置を前方へと移動させる。これにより、水中スクータ10の前方の浮力が大きくなり、水中スクータ10の前方が浮き上がる(後方が沈み込む)ことから、浮上に適した(浮上し易い)姿勢となる。
一方、水中スクータ10の進行方向を調整する(操舵する)ときは、左右のグリップ102L,102Rを独立に操作することにより、左右のエレベータ104L,104Rのいずれかを独立して揺動させる。具体的には、水中スクータ10を左旋回させるときは、図11に示す如く、左側グリップ102Lを操作して左側エレベータ104Lを垂直位置まで揺動させ、よって水中スクータ10の左側の水流抵抗(抗力)を右側のそれに比して大きくする。一方、水中スクータ10を右旋回させるときは、図12に示す如く、右側グリップ102Rを操作して右側エレベータ104Rを垂直位置まで揺動させ、よって水中スクータ10の右側の水流抵抗(抗力)を左側のそれに比して大きくする。
このように、左右のエレベータ104L,104Rを独立に操作して揺動角を相違させることで、水中スクータ10を操舵することができる。一方、左右のエレベータ104L,104Rを同様に操作して揺動角を一致させることにより、水中スクータ10を潜行あるいは浮上させることができる。さらには、それらの操作を組み合わせることによって、潜行あるいは浮上しながら操舵することも可能となる。即ち、左右のエレベータ104L,104Rを操作することで、水中スクータ10の航行深度と進行方向の両方を調整することができる。尚、各エレベータ104L,104Rの揺動角は、ロック機構108L,108Rによってそれぞれ独立して保持されるため、航行深度や進行方向を調整する際、操縦者は自身の力で各エレベータ104L,104Rの揺動角を保持する必要はない。
上記のように、この実施例に係る水中スクータ10にあっては、進行方向において左側と右側に配置された左右のエレベータ104L,104Rを備えると共に、それらを独立して垂直位置まで揺動自在としたので、左右のエレベータ104L,104Rを操作することによって水中スクータ10の航行深度と進行方向を調整できるため、操作性が向上し、よって航行深度や進行方向の調整に伴う操縦者の負担を軽減することができる。
また、各エレベータ104L,104Rに接続されたグリップ102L,102Rに、エレベータ104L,104Rの揺動角を独立して保持するロック機構108L,108Rを設けるようにしたので、航行深度や進行方向を調整する際、操縦者は自身の力でエレベータ104L,104Rの揺動角を保持する必要がなく、よって航行深度や進行方向の調整に伴う操縦者の負担を一層軽減することができる。
また、メインフレーム12に騎乗部たる第1および第2のエアタンク22,24を配置し、そこに操縦者が騎乗するようにしたので、操縦者を牽引するタイプの従来例に比して操縦者の負担を軽減させることができる。
また、第1のエアタンク22に封入された空気をエンジンEの燃焼用空気として供給すると共に、第2のエアタンク24に封入された空気を操縦者OPの呼吸用空気として供給するようにしたので、水上および水中での航行が可能になると共に、操縦者の快適性を向上させることができる。
また、第1および第2のエアタンク22,24を水中スクータ10の進行方向にスライド自在とし、それらの浮力が作用する位置を可変としたことから、水中スクータ10を潜行または浮上に適した姿勢にすることができ、よって水中スクータ10の深度調整を容易に行うことができる。
以上の如く、この発明の第1実施例にあっては、操縦者(OP)に操縦されて水上または水中を航行する水中スクータ(10)において、前記水中スクータ(10)の進行方向において左側に配置された左右軸回りに揺動自在な左側エレベータ(104L)と、前記水中スクータ(10)の進行方向において右側に配置された左右軸回りに揺動自在な右側エレベータ(104R)とを備えると共に、前記左側エレベータ(104L)と前記右側エレベータ(104R)が、それぞれ独立して垂直位置まで揺動自在とされるように構成した。
また、前記左側エレベータ(104L)に接続されると共に、前記操縦者(OP)に操作されて前記左側エレベータ(104L)の揺動角を調整する左側操作部(左側グリップ102L)と、前記右側エレベータ(104R)に接続されると共に、前記操縦者(OP)に操作されて前記右側エレベータ(104R)の揺動角を調整する右側操作部(右側グリップ102R)と、前記左側操作部(102L)に設けられた前記左側エレベータ(104L)の揺動角を保持する左側エレベータ揺動角保持機構(左側ロック機構108L)と、および前記右側操作部(102R)に設けられた前記右側エレベータ(104R)の揺動角を保持する右側エレベータ揺動角保持機構(右側ロック機構108R)とを備えるように構成した。
尚、上記において、プロペラ16を駆動する駆動源をエンジンEとしたが、電動モータなどであっても良い。
また、水中スクータ10が水上あるいは水面付近を航行するとき(即ち、航行深度が浅く、シュノーケル48の上端が水面より上方に位置するとき)は、シュノーケル48の上端からスタータグリップ92を取り外して前記切り欠き部48aに係止させる(即ち、開口部を封止しないようにする)ことで、外気をエンジンEの燃焼用空気として取り入れるようにしても良い。このとき、第1のエアタンク22に接続されたバルブ36を閉弁し、第1のエアタンク22からの空気の供給を停止することで、タンク内に封入された空気の消費量を低減することができる。
さらに、シュノーケル48とマウスピース76を接続し、水中スクータ10が水上を航行するときは操縦者の呼吸用空気も外部から導入するようにしても良い。このとき、第2のエアタンク24に接続されたバルブ42を閉弁し、第2のエアタンク24からの空気の供給を停止することで、同様に封入された空気の消費量を低減することができる。
10 水中スクータ
102L 左側グリップ(左側操作部)
102R 右側グリップ(右側操作部)
104L 左側エレベータ
104R 右側エレベータ
108L 左側ロック機構(左側エレベータ揺動角保持機構)
108R 右側ロック機構(右側エレベータ揺動角保持機構)
102L 左側グリップ(左側操作部)
102R 右側グリップ(右側操作部)
104L 左側エレベータ
104R 右側エレベータ
108L 左側ロック機構(左側エレベータ揺動角保持機構)
108R 右側ロック機構(右側エレベータ揺動角保持機構)
Claims (2)
- 操縦者に操縦されて水上または水中を航行する水中スクータにおいて、前記水中スクータの進行方向において左側に配置された左右軸回りに揺動自在な左側エレベータと、前記水中スクータの進行方向において右側に配置された左右軸回りに揺動自在な右側エレベータとを備えると共に、前記左側エレベータと前記右側エレベータが、それぞれ独立して垂直位置まで揺動自在とされることを特徴とする水中スクータ。
- さらに、前記左側エレベータに接続されると共に、前記操縦者に操作されて前記左側エレベータの揺動角を調整する左側操作部と、前記右側エレベータに接続されると共に、前記操縦者に操作されて前記右側エレベータの揺動角を調整する右側操作部と、前記左側操作部に設けられた前記左側エレベータの揺動角を保持する左側エレベータ揺動角保持機構と、および前記右側操作部に設けられた前記右側エレベータの揺動角を保持する右側エレベータ揺動角保持機構とを備えることを特徴とする請求項1記載の水中スクータ。
Priority Applications (2)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2004116158A JP2005297744A (ja) | 2004-04-09 | 2004-04-09 | 水中スクータ |
| US11/102,145 US7096815B2 (en) | 2004-04-09 | 2005-04-08 | Underwater scooter |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2004116158A JP2005297744A (ja) | 2004-04-09 | 2004-04-09 | 水中スクータ |
Publications (1)
| Publication Number | Publication Date |
|---|---|
| JP2005297744A true JP2005297744A (ja) | 2005-10-27 |
Family
ID=35329817
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2004116158A Withdrawn JP2005297744A (ja) | 2004-04-09 | 2004-04-09 | 水中スクータ |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP2005297744A (ja) |
Cited By (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| WO2011145578A1 (ja) * | 2010-05-17 | 2011-11-24 | Ntn株式会社 | 車輪用軸受装置 |
| CN114852306A (zh) * | 2022-05-31 | 2022-08-05 | 中山市朗宇模型有限公司 | 一种手柄组件以及水下推进器 |
-
2004
- 2004-04-09 JP JP2004116158A patent/JP2005297744A/ja not_active Withdrawn
Cited By (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| WO2011145578A1 (ja) * | 2010-05-17 | 2011-11-24 | Ntn株式会社 | 車輪用軸受装置 |
| CN114852306A (zh) * | 2022-05-31 | 2022-08-05 | 中山市朗宇模型有限公司 | 一种手柄组件以及水下推进器 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP4219848B2 (ja) | 水中スクータ | |
| US8491348B2 (en) | Lever position sensor | |
| US3890920A (en) | Controls for aquatic towing craft | |
| WO2016144852A1 (en) | Modular personal watercraft hull, steering, control, and seating systems | |
| JPH10157692A (ja) | 船艇の可動式スポンソン装置 | |
| US5433164A (en) | Submersible vessel | |
| US20080236471A1 (en) | Powered kayak-like boat | |
| JP2005297744A (ja) | 水中スクータ | |
| JP4219847B2 (ja) | 水中スクータ | |
| JP4219849B2 (ja) | 水中スクータ | |
| JP4219845B2 (ja) | 水中スクータ | |
| US7096815B2 (en) | Underwater scooter | |
| JP2005297745A (ja) | 水中スクータ | |
| JP4219846B2 (ja) | 水中スクータ | |
| JP2005297738A (ja) | 水中スクータ | |
| CN110979600A (zh) | 敞开式潜水艇 | |
| US7011035B2 (en) | Underwater scooter | |
| JP2005297740A (ja) | 水中スクータ | |
| JP2005297739A (ja) | 水中スクータ | |
| JPS61188294A (ja) | 小型水上乗物 | |
| CN211494419U (zh) | 敞开式潜水艇 | |
| CN110920836B (zh) | 一种舰艇上使用的便捷喷气推进式救生圈 | |
| US20070249241A1 (en) | Powered kayak-like boat | |
| JP2005297746A (ja) | 水中スクータ | |
| EP0465996B1 (en) | Watercraft |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A300 | Application deemed to be withdrawn because no request for examination was validly filed |
Free format text: JAPANESE INTERMEDIATE CODE: A300 Effective date: 20070703 |