JP2005296619A - 内視鏡バルーン制御装置 - Google Patents
内視鏡バルーン制御装置 Download PDFInfo
- Publication number
- JP2005296619A JP2005296619A JP2004329522A JP2004329522A JP2005296619A JP 2005296619 A JP2005296619 A JP 2005296619A JP 2004329522 A JP2004329522 A JP 2004329522A JP 2004329522 A JP2004329522 A JP 2004329522A JP 2005296619 A JP2005296619 A JP 2005296619A
- Authority
- JP
- Japan
- Prior art keywords
- balloon
- endoscope
- pressure
- air supply
- control device
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Granted
Links
Images









Classifications
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B1/00—Instruments for performing medical examinations of the interior of cavities or tubes of the body by visual or photographical inspection, e.g. endoscopes; Illuminating arrangements therefor
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B1/00—Instruments for performing medical examinations of the interior of cavities or tubes of the body by visual or photographical inspection, e.g. endoscopes; Illuminating arrangements therefor
- A61B1/31—Instruments for performing medical examinations of the interior of cavities or tubes of the body by visual or photographical inspection, e.g. endoscopes; Illuminating arrangements therefor for the rectum, e.g. proctoscopes, sigmoidoscopes, colonoscopes
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B1/00—Instruments for performing medical examinations of the interior of cavities or tubes of the body by visual or photographical inspection, e.g. endoscopes; Illuminating arrangements therefor
- A61B1/00064—Constructional details of the endoscope body
- A61B1/00071—Insertion part of the endoscope body
- A61B1/0008—Insertion part of the endoscope body characterised by distal tip features
- A61B1/00082—Balloons
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B1/00—Instruments for performing medical examinations of the interior of cavities or tubes of the body by visual or photographical inspection, e.g. endoscopes; Illuminating arrangements therefor
- A61B1/00131—Accessories for endoscopes
- A61B1/00135—Oversleeves mounted on the endoscope prior to insertion
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B1/00—Instruments for performing medical examinations of the interior of cavities or tubes of the body by visual or photographical inspection, e.g. endoscopes; Illuminating arrangements therefor
- A61B1/00147—Holding or positioning arrangements
- A61B1/00154—Holding or positioning arrangements using guiding arrangements for insertion
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B1/00—Instruments for performing medical examinations of the interior of cavities or tubes of the body by visual or photographical inspection, e.g. endoscopes; Illuminating arrangements therefor
- A61B1/012—Instruments for performing medical examinations of the interior of cavities or tubes of the body by visual or photographical inspection, e.g. endoscopes; Illuminating arrangements therefor characterised by internal passages or accessories therefor
- A61B1/015—Control of fluid supply or evacuation
Landscapes
- Health & Medical Sciences (AREA)
- Life Sciences & Earth Sciences (AREA)
- Surgery (AREA)
- Nuclear Medicine, Radiotherapy & Molecular Imaging (AREA)
- Biomedical Technology (AREA)
- Optics & Photonics (AREA)
- Pathology (AREA)
- Radiology & Medical Imaging (AREA)
- Biophysics (AREA)
- Engineering & Computer Science (AREA)
- Physics & Mathematics (AREA)
- Heart & Thoracic Surgery (AREA)
- Medical Informatics (AREA)
- Molecular Biology (AREA)
- Animal Behavior & Ethology (AREA)
- General Health & Medical Sciences (AREA)
- Public Health (AREA)
- Veterinary Medicine (AREA)
- Endoscopes (AREA)
Abstract
【解決手段】本発明の内視鏡バルーン制御装置は、挿入部2B先端の外周部に固定用のバルーン9を取り付けた内視鏡2の前記バルーン9及び、先端外周部に固定用のバルーン11を取り付け、前記内視鏡2を挿通させるオーバーチューブ3の前記バルーン11にエアを供給する第1、第2ポンプ32a、32bと、前記バルーン9、11への送気または吸気時間を検出するタイマカウンタと、このタイマカウンタによる検出結果に基づき前記第1、第2ポンプ32a、32bを動作させて前記各バルーン9、11内の圧力を制御する制御部35と、を有している。
【選択図】 図1
Description
例えば、前記内視鏡は、深部挿入によりできた前記内視鏡の余分な屈曲や撓みを伸ばそうとして引き戻してくると、前記挿入部先端も抜けてくるため、屈曲や撓みが取れず、深部挿入が困難になってしまう。
例えば、特開2002−301019号公報には、前記内視鏡の前記バルーンと前記オーバーチューブの前記バルーンに対し、制御手段で各バルーン内のエアの圧力を測定して前記各バルーン内の圧力を制御しながらポンプ装置からエアを供給するようにした内視鏡装置が開示されている。
前記ビデオプロセッサ5は、前記内視鏡2の前記CCDからの撮像信号に信号処理を施し、撮像信号に基づく画像データ(例えば内視鏡ライブ画像データ)をモニター6に供給する。
前記モニター6は、接続ケーブル5Aにより前記ビデオプロセッサ5に接続されている。前記モニター6は、前記ビデオプロセッサ5からの画像データに基づく内視鏡画像を表示する。
前記バルーン11には、前記オーバーチューブ3の基端部側から先端部側にかけて設けられたエア供給チューブ12が接続されている。
図2は前記内視鏡バルーン制御装置の概略構成を示す構成図である。
図2に示すように、前記内視鏡バルーン制御装置7は、逆流防止用タンク15が設けられ、前面には圧力表示器16,電源スイッチ17が設けられている。
前記逆流防止用タンク15は、液体の逆流を防止可能に構成され、前記内視鏡2のバルーン9用のタンク15Aと、前記オーバーチューブ3のバルーン11用のタンク15Bとを有している。これらタンク15A、15Bにはそれぞれ対応する前記第1、第2送気用チューブ13、14が接続されている。
前記表示器16Aは前記内視鏡2のバルーン9用の管路内の圧力値を表示し、前記表示器16Bは前記オーバーチューブ3のバルーン11用の管路内の圧力値を表示する。
また、図1及び図2に示すように、前記内視鏡バルーン制御装置7の一面には、接続ケーブル8Aを介して、リモートコントローラ8が接続されている。このリモートコントローラ8は、前記接続ケープル8Aを介して、後述する前記内視鏡バルーン制御装置7の内部に設けられた制御部35に電気的に接続されている。
図3に示すように、前記リモートコントローラ8は、術者が操作し易いように、例えば内視鏡側バルーン制御用の各種ボタンとオーバーチューブ側バルーン制御用の各種ボタンとがリモートコントローラ本体の左右に分かれて配設されている。
前記リモートコントローラ8の左側には、前記内視鏡側バルーン制御用の操作ボタンとして、開放ボタン18a、送気開始ボタン19a、吸気開始ボタン20a、停止ボタン21aが設けられている。
さらに、前記リモートコントローラ8の下部には、電源ボタン22、緊急停止ボタン23が設けられている。
前記緊急停止ボタン23は、前記内視鏡バルーン制御装置7の後述する第1〜第3プレーカ31a〜31cを直接にオフして前記内視鏡バルーン制御装置7による各バルーン9、11の送気制御等を緊急停止するためのボタンである。
図4に示すように、前記内視鏡バルーン制御装置7は、スイッチング電源部30、第1〜第3プレーカ31a〜31c、第1、第2ポンプ32a、32b、第1、第2流量調整バルブ32c、32d、管路切替部33、第1、第2圧力センサ34a、34b、及び前記制御手段である制御部(制御ユニット)35を有している。
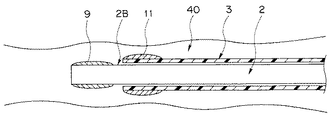
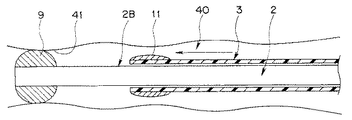
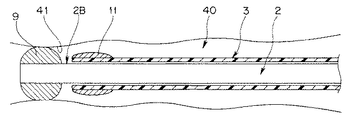
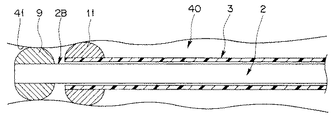
次に、術者は、図7に示すように、前記オーバーチューブ3を腸管40に対して保持し、前記内視鏡2の前記挿入部2Bのみ深部に挿入させていく。
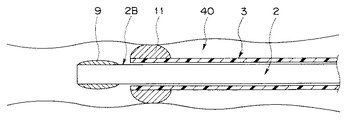
そして、術者は前記内視鏡2の前記挿入部2Bを所定距離挿入した状態で、図8に示すように、リモートコントローラ8の内視鏡側の送気開始ボタン19a(図3参照)を押下して前記第1ポンプ32aから内視鏡2の先端に取り付けた本体固定用のバルーン9内にエアを供給し、このバルーン9を膨らませて腸管41に固定する。
図12乃至図15は内視鏡バルーン制御装置の作用を説明するためのもので、図12は制御部のメインプログラムを示すフローチャート、図13は図12のスイッチ状態確認モジュールに基づく処理ルーチンを示すフローチャート、図14は図13の送気モジュールに基づく処理ルーチンを示すフローチャート、図15は図13の吸気モジュールに基づく処理ルーチンを示すフローチャートである。
そして、前記スイッチ状態確認モジュールに基づく処理ルーチンの完了後、前記制御部35は、ステップS8の処理にて前記タイマカウンタによるカウンタ値に1を加えた後、処理を前記ステップS3の判断処理に戻す。
前記制御部35は、前記ステップS6の処理を実行すると、図13に示すスイッチ状態確認モジュールの処理ルーチンを起動する。
なお、本実施例において、前記制御部35には、予め前記第1、第2センサ34a、34bからの圧力測定結果と比較を行うための圧力最大値及び圧力上限値とが予め設定されるようになっている。また、前記圧力上限値と前記圧力最大値とは、前記圧力制限値<前記圧力最大値となる関係を満足している。この場合、前記圧力最大値は、前記各バルーン9、11が膨らんで危険な状態となるのに相当する圧力値であり、前記圧力上限値は、前記各バルーン9、11が膨らんで腸管に固定するのに相当する圧力値を意味している。
ステップS29の処理では、前記制御部35は、第1ポンプ32aの動作を停止させるとともに、管路を開放するように前記管路切替部33及び第1流量調整バルブ32cを制御する。その後、前記制御部35は、ステップS30の処理で、前記警告フラグをオンさせた後、ステップS37に移行し、前記送気モジュールに基づく処理ルーチンを終了させる。
ステップS31の処理では、前記制御部35は、前記ステップS29の処理と同様に、第1ポンプ32aの動作を停止させるとともに、管路を開放するように前記管路切替部33及び第1流量調整バルブ32cを制御する。その後、前記制御部35は、前記ステップS30の処理と同様に、ステップS32の処理で、前記警告フラグをオンさせた後、ステップS37に移行し、前記送気モジュールに基づく処理ルーチンを終了させる。
また、前記ステップS23の判断処理にて、前記タイマカウンタのカウンタ値が1と等しくないと判断した場合には、前記制御部35は、前記ステップS24に移行する。
なお、前記流量カウンタ値とは、200msec(20msec×10)でどれだけの送気量を送気できるか決定するための変数であり、例えば前記タイマーカウンタ値0〜9に応じた0〜9までの設定が可能である。実際には、前記流量カウンタ(図示せず)によって前記流量カウンタ値を20msec毎にカウントしている。また、前記所定の送気量とは、前記内視鏡バルーン制御装置7の20msec毎に送気可能なおよその送気量(送気流量)を示している。
前記制御部35は、前記ステップS17の処理を実行すると、図15に示す吸気モジュールの処理ルーチンを起動する。
ステップS47の処理では、前記制御部35は、前記第1ポンプ32aの動作を停止させるとともに、管路を開放するように前記管路切替部33及び第1流量調整バルブ32cを制御する。その後、前記制御部35は、ステップS48の処理で、前記警告フラグをオンさせた後、ステップS53に移行し、前記吸気モジュールに基づく処理ルーチンを終了させる。
また、前記ステップS41の判断処理にて、前記タイマカウンタのカウンタ値が1と等しくないと判断した場合には、前記制御部35は、前記ステップS42に移行する。
ステップS51の処理では、前記制御部35は、第1、第2ポンプ32a、32bにより吸気動作を停止させるとともに、管路を保持するように前記管路切替部33及び第1、第流量調整バルブ32c、32dを制御した後、前記ステップS53に移行し、前記吸気モジュールに基づく処理ルーチンを終了させる。
また、前記ステップS43の判断処理にて、前記流量カウンタ値が前記所定の吸気量より小さいと判断した場合には、前記制御部35は、ステップS44の処理にて吸気開始ボタン20aに基づく吸気管路を設定するように前記管路切替部33を制御する。その後、前記制御部35は、ステップS45の処理にて前記流量カウンタ値に1を足し、続くステップS46の処理にて前記吸気時間に1を足して前記ステップS53に移行し、前記吸気モジュールに基づく処理ルーチンを終了させる。
図16に示す内視鏡バルーン制御装置7において、前記それぞれのリリーフ圧は、 圧力上限値<圧力最大値=<リリーフ圧 となるように設定されている。
通常、前記圧力上限値、前記圧力最大値は、前記バルーン内圧力制御手段(第1、第2リリーフ弁36a、36b)とは異なる圧力制御方法であり電気式の前記第1、第2圧力センサ34a、34bにより、制御されている。また、前記第1、第2流量調整バルブ32c、32d内に含まれ、流量を調節する電磁弁(図示せず)も電気式のもので、制御部35によって制御されている。
また、前記内視鏡バルーン制御装置7は、2系統の送気管路(送気ライン)の内、いずれか一方の送気管路に対応する圧力センサ及び流量調整バルブの動作が停止した場合でも、生体内への圧力がリリーフ圧を超えた場合には、対応するリリーフ弁が動作することで、生体内への印加圧力を減圧することが可能であり、同時に、他方の送気管路については正常に動作させることが可能となる。
(1) 挿入部先端の外周部に固定用のバルーンを取り付けた内視鏡の前記バルーンにエアを供給するポンプと、前記バルーン内のエアの圧力を測定しこの測定結果に基づき前記ポンプを動作させて前記バルーン内の圧力を制御する制御手段とを有する内視鏡用バルーン制御装置であって、
前記制御手段は、前記バルーンへの送気または吸気流量を検出する流量検出手段を有し、この流量検出手段による検出結果に基づき前記ポンプを動作させて前記バルーンへの送気または吸気流量を制御することを特徴とする内視鏡バルーン制御装置。
前記制御手段は、前記各バルーンへの送気または吸気流量を検出する流量検出手段を有し、この流量検出手段による検出結果に基づき前記ポンプを動作させて前記各バルーンへの送気または吸気流量を制御することを特徴とする内視鏡バルーン制御装置。
前記制御手段は、前記バルーンへの送気または吸気時間を検出する時間検出手段を有し、この時間検出手段による検出結果に基づき前記バルーン内の圧力を制御することを特徴とする内視鏡バルーン制御装置。
前記制御手段は、前記バルーンへの送気または吸気時間を検出する時間検出手段を有し、この時間検出手段による検出結果に基づき前記各バルーン内の圧力を制御することを特徴とする内視鏡バルーン制御装置。
前記制御手段は、前記バルーンへの送気または吸気流量を検出する流量検出手段と、前記バルーンへの送気または吸気時間を検出する時間検出手段を有し、前記流量検出手段による検出結果及び前記時間検出手段による検出結果に基づき、前記ポンプを動作させて前記バルーンへの送気または吸気流量を制御することを特徴とする内視鏡バルーン制御装置。
前記制御手段は、前記バルーンへの送気または吸気流量を検出する流量検出手段と、前記バルーンへの送気または吸気時間を検出する時間検出手段を有し、前記流量検出手段による検出結果及び前記時間検出手段による検出結果に基づき、前記ポンプを動作させて前記各バルーンへの送気または吸気流量を制御することを特徴とする内視鏡バルーン制御装置。
2…内視鏡、
2A…操作部、
2B…挿入部、
2C…ユニバーサルコード、
3…オーバーチューブ、
4…光源装置、
5…ビデオプロセッサ、
6…モニター、
7…内視鏡バルーン制御装置、
8…リモートコントローラ、
9、11…バルーン、
10、12…エア供給チューブ、
12…内視鏡、
13…第1送気用チューブ、
14…第2送気用チューブ、
16…圧力表示器、
17…電源スイッチ、
23…緊急停止ボタン、
30…スイッチング電源部、
31a…第1プレーカ、
31b…第2プレーカ、
31c…第3プレーカ、
32a…第1ポンプ、
32b…第2ポンプ、
32c…第1流量調整バルブ、
32d…第2流量調整バルブ、
33…管路切替部、
34a…第1圧力センサ、
34b…第2圧力センサ、
35…制御部。
代理人 弁理士 伊藤 進
Claims (5)
- 挿入部先端の外周部に固定用のバルーンを取り付けた内視鏡の前記バルーンにエアを供給するポンプと、
前記バルーンへの送気または吸気時間を検出する時間検出手段と、
前記時間検出手段による検出結果に基づき前記バルーン内の圧力を制御する制御手段と、
を備えたことを特徴とする内視鏡バルーン制御装置。 - 挿入部先端の外周部に固定用のバルーンを取り付けた内視鏡の前記バルーン及び、先端外周部に固定用のバルーンを取り付け、前記内視鏡を挿通させるオーバーチューブの前記バルーンにエアを供給するポンプと、
前記各バルーンへの送気または吸気時間を検出する時間検出手段と、
前記時間検出手段による検出結果に基づき前記各バルーン内の圧力を制御する制御手段と、
を備えたことを特徴とする内視鏡バルーン制御装置。 - 前記制御手段は、前記時間検出手段からの検出結果が所定の閾値よりも超えた場合には前記ポンプの動作を停止させることを特徴とする請求項1又は請求項2に記載の内視鏡バルーン制御装置。
- 前記制御手段は、前記バルーン内の圧力を第1の圧力値と第2の圧力値の間に制御するもので、前記バルーン内の圧力が前記第1の圧力値より大きい前記第2の圧力値を超えた場合には、前記バルーン内の圧力を減圧することを特徴とする請求項1に記載の内視鏡バルーン制御装置。
- 前記制御手段は、バルーン内の圧力制御方法が異なる複数のバルーン内圧力制御手段を有し、一方の前記バルーン内圧力制御手段の故障に対して、他方の前記バルーン内圧力制御手段によって前記バルーン内の圧力制御が可能であることを特徴とする請求項4に記載の内視鏡バルーン制御装置。
Priority Applications (6)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2004329522A JP4756851B2 (ja) | 2004-03-19 | 2004-11-12 | 内視鏡バルーン制御装置 |
| PCT/JP2005/004534 WO2005089626A1 (ja) | 2004-03-19 | 2005-03-15 | 内視鏡バルーン制御装置 |
| CN2008101358973A CN101380220B (zh) | 2004-03-19 | 2005-03-15 | 内窥镜球囊控制装置 |
| KR1020067019127A KR100840050B1 (ko) | 2004-03-19 | 2005-03-15 | 내시경 벌룬 제어 장치 |
| EP05720791.2A EP1726249A4 (en) | 2004-03-19 | 2005-03-15 | ENDOSCOPE BALLOON CONTROL DEVICE |
| US11/522,826 US20070038025A1 (en) | 2004-03-19 | 2006-09-18 | Endoscope balloon control device |
Applications Claiming Priority (3)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2004081655 | 2004-03-19 | ||
| JP2004081655 | 2004-03-19 | ||
| JP2004329522A JP4756851B2 (ja) | 2004-03-19 | 2004-11-12 | 内視鏡バルーン制御装置 |
Related Child Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2011104332A Division JP5242733B2 (ja) | 2004-03-19 | 2011-05-09 | 内視鏡バルーン制御装置 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2005296619A true JP2005296619A (ja) | 2005-10-27 |
| JP4756851B2 JP4756851B2 (ja) | 2011-08-24 |
Family
ID=34993396
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2004329522A Expired - Fee Related JP4756851B2 (ja) | 2004-03-19 | 2004-11-12 | 内視鏡バルーン制御装置 |
Country Status (5)
| Country | Link |
|---|---|
| US (1) | US20070038025A1 (ja) |
| EP (1) | EP1726249A4 (ja) |
| JP (1) | JP4756851B2 (ja) |
| KR (1) | KR100840050B1 (ja) |
| WO (1) | WO2005089626A1 (ja) |
Cited By (9)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2006130013A (ja) * | 2004-11-04 | 2006-05-25 | Fujinon Corp | 内視鏡装置用のバルーン制御装置 |
| JP2007209626A (ja) * | 2006-02-10 | 2007-08-23 | Fujinon Corp | バルーン制御装置 |
| JP2008200127A (ja) * | 2007-02-16 | 2008-09-04 | Olympus Medical Systems Corp | 医療装置 |
| JP2011229988A (ja) * | 2011-08-23 | 2011-11-17 | Fujifilm Corp | 内視鏡システム |
| JP2014188080A (ja) * | 2013-03-26 | 2014-10-06 | Olympus Medical Systems Corp | 挿入装置 |
| JP2018161489A (ja) * | 2006-05-18 | 2018-10-18 | スマート・メディカル・システムズ・リミテッド | 可撓性が高められた補助内視鏡アセンブリ |
| JP2019134960A (ja) * | 2011-03-07 | 2019-08-15 | スマート・メディカル・システムズ・リミテッド | バルーン付き内視鏡装置およびその方法 |
| CN114081421A (zh) * | 2021-11-19 | 2022-02-25 | 湖南省华芯医疗器械有限公司 | 一种插入部、内窥镜及驱动方法 |
| WO2022208737A1 (ja) * | 2021-03-31 | 2022-10-06 | オリンパス株式会社 | 内視鏡用オーバーチューブ |
Families Citing this family (15)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP6033147B2 (ja) * | 2013-03-26 | 2016-11-30 | オリンパス株式会社 | 挿入装置 |
| JP7082052B2 (ja) | 2015-09-03 | 2022-06-07 | ネプチューン メディカル インク. | 小腸内での内視鏡前進の為の器具 |
| US10765304B2 (en) * | 2015-09-28 | 2020-09-08 | Bio-Medical Engineering (HK) Limited | Endoscopic systems, devices, and methods for performing in vivo procedures |
| CN110191667B (zh) | 2016-08-18 | 2022-06-03 | 海王星医疗公司 | 用于增强小肠视觉效果的装置和方法 |
| WO2019018682A1 (en) | 2017-07-20 | 2019-01-24 | Neptune Medical Inc. | DYNAMICALLY RIGIDING SURFACE |
| EP3801187B1 (en) | 2018-05-31 | 2024-02-07 | Neptune Medical Inc. | Device for enhanced visualization of the small intestine |
| EP3823711A4 (en) | 2018-07-19 | 2022-05-18 | Neptune Medical Inc. | DYNAMIC REINFORCING MEDICAL COMPOSITE STRUCTURES |
| US11793392B2 (en) | 2019-04-17 | 2023-10-24 | Neptune Medical Inc. | External working channels |
| WO2020214221A1 (en) | 2019-04-17 | 2020-10-22 | Neptune Medical Inc. | Dynamically rigidizing composite medical structures |
| KR20230007343A (ko) | 2020-03-30 | 2023-01-12 | 넵튠 메디컬 인코포레이티드 | 디바이스를 강성화하기 위한 적층된 벽 |
| KR102486929B1 (ko) * | 2020-10-29 | 2023-01-09 | 김응석 | 흉부 카테터용 공기 주입 스토퍼 |
| EP4284226A4 (en) | 2021-01-29 | 2024-12-25 | Neptune Medical Inc. | DEVICES AND METHODS FOR PREVENTING ACCIDENTAL MOVEMENT OF DYNAMIC STIFFENING DEVICES |
| JP2025514183A (ja) | 2022-04-27 | 2025-05-02 | ネプチューン メディカル インク. | 内視鏡用衛生シース |
| WO2025054618A1 (en) | 2023-09-07 | 2025-03-13 | Neptune Medical Inc. | Pressure rigidization apparatuses and methods |
| WO2025072977A1 (en) | 2023-09-28 | 2025-04-03 | Neptune Medical Inc. | Telescoping robot |
Citations (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH03231623A (ja) * | 1990-02-05 | 1991-10-15 | Olympus Optical Co Ltd | 内視鏡用自動挿入装置 |
| JP2001340462A (ja) * | 2000-06-05 | 2001-12-11 | Hironori Yamamoto | 内視鏡挿入補助用バルーン付きチューブ |
| JP2003144378A (ja) * | 2001-11-15 | 2003-05-20 | Olympus Optical Co Ltd | 内視鏡用シース |
| JP2003204920A (ja) * | 2002-01-11 | 2003-07-22 | Olympus Optical Co Ltd | 挿入補助具 |
Family Cites Families (24)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US3570488A (en) * | 1969-05-12 | 1971-03-16 | Technion Res & Dev Foundation | Automatic apparatus for urinary bladder irrigation |
| US4040413A (en) * | 1974-07-18 | 1977-08-09 | Fuji Photo Optical Co. Ltd. | Endoscope |
| US4227407A (en) * | 1978-11-30 | 1980-10-14 | Cornell Research Foundation, Inc. | Volume flow measurement system |
| US4445892A (en) * | 1982-05-06 | 1984-05-01 | Laserscope, Inc. | Dual balloon catheter device |
| US4924862A (en) * | 1987-08-19 | 1990-05-15 | Gary Levinson | Pressure controller and leak detector for tracheal tube cuff |
| US5191878A (en) * | 1990-04-12 | 1993-03-09 | Olympus Optical Co., Ltd. | Endoscope device |
| US5215523A (en) * | 1991-05-30 | 1993-06-01 | Eli Williams | Balloon catheter inflation syringe with remote display |
| US5259838A (en) * | 1992-06-18 | 1993-11-09 | Merit Medical Systems, Inc. | Syringe apparatus with attached pressure gauge and timer |
| US5342298A (en) * | 1992-07-31 | 1994-08-30 | Advanced Cardiovascular Systems, Inc. | Automated fluid pressure control system |
| JPH06269392A (ja) * | 1993-03-22 | 1994-09-27 | Olympus Optical Co Ltd | 内視鏡 |
| US5460609A (en) * | 1993-11-22 | 1995-10-24 | Advanced Cardiovascular Systems, Inc. | Electromechanical inflation/deflation system |
| US5599301A (en) * | 1993-11-22 | 1997-02-04 | Advanced Cardiovascular Systems, Inc. | Motor control system for an automatic catheter inflation system |
| US5749853A (en) * | 1995-03-17 | 1998-05-12 | Advanced Cardiovascular Systems, Inc. | Inflation control system with elapsed time measurement |
| US5800493A (en) * | 1995-04-26 | 1998-09-01 | Gynecare, Inc. | Intrauterine ablation system |
| WO1997022373A1 (fr) * | 1995-12-18 | 1997-06-26 | Nippon Zeon Co., Ltd. | Mecanisme d'entrainement pour equipement medical |
| US5891134A (en) * | 1996-09-24 | 1999-04-06 | Goble; Colin | System and method for applying thermal energy to tissue |
| US6402744B2 (en) * | 1998-02-19 | 2002-06-11 | Curon Medical, Inc. | Systems and methods for forming composite lesions to treat dysfunction in sphincters and adjoining tissue regions |
| US6179815B1 (en) * | 1998-07-21 | 2001-01-30 | Merit Medical Systems, Inc. | Low compliance inflation/deflation system |
| US6585639B1 (en) * | 2000-10-27 | 2003-07-01 | Pulmonx | Sheath and method for reconfiguring lung viewing scope |
| JP2002301019A (ja) * | 2001-04-09 | 2002-10-15 | Hironori Yamamoto | 内視鏡装置 |
| JP4632577B2 (ja) * | 2001-05-30 | 2011-02-16 | オリンパス株式会社 | 計測内視鏡装置 |
| US20030060813A1 (en) * | 2001-09-22 | 2003-03-27 | Loeb Marvin P. | Devices and methods for safely shrinking tissues surrounding a duct, hollow organ or body cavity |
| US7641668B2 (en) * | 2003-05-16 | 2010-01-05 | Scimed Life Systems, Inc. | Fluid delivery system and related methods of use |
| WO2005089625A1 (ja) * | 2004-03-19 | 2005-09-29 | Olympus Corporation | 内視鏡バルーン制御装置及び内視鏡バルーン制御装置の異常判定方法 |
-
2004
- 2004-11-12 JP JP2004329522A patent/JP4756851B2/ja not_active Expired - Fee Related
-
2005
- 2005-03-15 KR KR1020067019127A patent/KR100840050B1/ko not_active Expired - Fee Related
- 2005-03-15 WO PCT/JP2005/004534 patent/WO2005089626A1/ja not_active Ceased
- 2005-03-15 EP EP05720791.2A patent/EP1726249A4/en not_active Withdrawn
-
2006
- 2006-09-18 US US11/522,826 patent/US20070038025A1/en not_active Abandoned
Patent Citations (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH03231623A (ja) * | 1990-02-05 | 1991-10-15 | Olympus Optical Co Ltd | 内視鏡用自動挿入装置 |
| JP2001340462A (ja) * | 2000-06-05 | 2001-12-11 | Hironori Yamamoto | 内視鏡挿入補助用バルーン付きチューブ |
| JP2003144378A (ja) * | 2001-11-15 | 2003-05-20 | Olympus Optical Co Ltd | 内視鏡用シース |
| JP2003204920A (ja) * | 2002-01-11 | 2003-07-22 | Olympus Optical Co Ltd | 挿入補助具 |
Cited By (10)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2006130013A (ja) * | 2004-11-04 | 2006-05-25 | Fujinon Corp | 内視鏡装置用のバルーン制御装置 |
| US8439825B2 (en) | 2004-11-04 | 2013-05-14 | Fujifilm Corporation | Balloon controller for endoscopic apparatus |
| JP2007209626A (ja) * | 2006-02-10 | 2007-08-23 | Fujinon Corp | バルーン制御装置 |
| JP2018161489A (ja) * | 2006-05-18 | 2018-10-18 | スマート・メディカル・システムズ・リミテッド | 可撓性が高められた補助内視鏡アセンブリ |
| JP2008200127A (ja) * | 2007-02-16 | 2008-09-04 | Olympus Medical Systems Corp | 医療装置 |
| JP2019134960A (ja) * | 2011-03-07 | 2019-08-15 | スマート・メディカル・システムズ・リミテッド | バルーン付き内視鏡装置およびその方法 |
| JP2011229988A (ja) * | 2011-08-23 | 2011-11-17 | Fujifilm Corp | 内視鏡システム |
| JP2014188080A (ja) * | 2013-03-26 | 2014-10-06 | Olympus Medical Systems Corp | 挿入装置 |
| WO2022208737A1 (ja) * | 2021-03-31 | 2022-10-06 | オリンパス株式会社 | 内視鏡用オーバーチューブ |
| CN114081421A (zh) * | 2021-11-19 | 2022-02-25 | 湖南省华芯医疗器械有限公司 | 一种插入部、内窥镜及驱动方法 |
Also Published As
| Publication number | Publication date |
|---|---|
| KR100840050B1 (ko) | 2008-06-19 |
| KR20060130228A (ko) | 2006-12-18 |
| WO2005089626A1 (ja) | 2005-09-29 |
| US20070038025A1 (en) | 2007-02-15 |
| EP1726249A1 (en) | 2006-11-29 |
| JP4756851B2 (ja) | 2011-08-24 |
| EP1726249A4 (en) | 2014-11-12 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP4756851B2 (ja) | 内視鏡バルーン制御装置 | |
| JP4481692B2 (ja) | 内視鏡バルーン制御装置 | |
| JP4409340B2 (ja) | 内視鏡バルーン制御装置 | |
| JP5242733B2 (ja) | 内視鏡バルーン制御装置 | |
| US7585276B2 (en) | Endoscope system and operation method for endoscope | |
| US8216128B2 (en) | Medical system with a biological information acquiring apparatus and a manipulation information acquiring apparatus | |
| JP6077973B2 (ja) | 送気装置 | |
| US20080146876A1 (en) | Endoscope apparatus | |
| US20070232853A1 (en) | Endoscope insertion assisting device, endoscope apparatus, medical treatment device and endoscope insertion method | |
| EP1582141B1 (en) | Balloon control apparatus | |
| KR100840051B1 (ko) | 내시경 벌룬 제어 장치 및 내시경 벌룬 제어 장치의 이상판정 방법 | |
| JP2009090087A (ja) | 内視鏡 | |
| US20200121163A1 (en) | Flexible tube insertion apparatus, insertion control apparatus, and flexible tube insertion support method | |
| JP2003010105A (ja) | 内視鏡装置 | |
| JP5400841B2 (ja) | 内視鏡システム | |
| CN205379286U (zh) | 内窥镜系统 | |
| KR20070018902A (ko) | 내시경 벌룬 제어 장치 | |
| JP2009207670A (ja) | 内視鏡 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20071030 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20100817 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20101015 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20110308 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20110509 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20110524 |
|
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20110531 |
|
| R151 | Written notification of patent or utility model registration |
Ref document number: 4756851 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R151 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20140610 Year of fee payment: 3 |
|
| S531 | Written request for registration of change of domicile |
Free format text: JAPANESE INTERMEDIATE CODE: R313531 |
|
| R350 | Written notification of registration of transfer |
Free format text: JAPANESE INTERMEDIATE CODE: R350 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| LAPS | Cancellation because of no payment of annual fees |