以下、本発明の実施例1であるカメラについて、図1から図7を参照しながら説明する。
図6は本実施例におけるカメラシステムの構成を示す概略図である。このカメラシステムは、カメラ本体と、該カメラ本体に着脱可能に装着されるレンズ装置とを有している。
カメラは、CCDあるいはCMOSセンサなどの撮像素子を用いた単板式のデジタルカラーカメラであり、撮像素子を連続的または単発的に駆動して動画像または静止画像を表わす画像信号を得る。ここで、撮像素子は、露光した光を画素毎に電気信号に変換して受光量に応じた電荷を蓄積し、蓄積された電荷を読み出すタイプのエリアセンサである。
図6において、101はカメラ本体、102はカメラ本体101に対して取り外し可能なレンズ装置である。レンズ装置102内には、撮影光学系が設けられている。レンズ装置102は、公知のマウント機構を介してカメラ本体101に電気的、機械的に接続される。そして、焦点距離の異なるレンズ装置102をカメラ本体101に装着することによって、様々な画角の撮影画面を得ることが可能である。
また、レンズ装置102では、不図示の駆動機構を介して撮影光学系103の一部の要素であるフォーカシングレンズを光軸L1方向に移動させたり、フォーカシングレンズを柔軟性のある透明弾性部材や液体レンズで構成し、界面形状を変化させて屈折力を変えたりすることで、撮影光学系の焦点調節を行う。
106はパッケージ124に収納された撮像素子である。撮影光学系103から撮像素子106に至る光路中には、撮像素子106上に物体像(光学像)の必要以上に高い空間周波数成分が伝達されないように撮影光学系103のカットオフ周波数を制限する光学ローパスフィルタ156が設けられている。また、撮影光学系103には、不図示の赤外線カットフィルタが形成されている。
撮像素子106から読み出された信号は、後述するように所定の処理が施された後、画像データとしてディスプレイユニット107上に表示される。ディスプレイユニット107はカメラ本体101の背面に取り付けられており、使用者はディスプレイユニット107での表示を直接観察できるようになっている。
ディスプレイユニット107を、有機EL空間変調素子や液晶空間変調素子、微粒子の電気泳動を利用した空間変調素子などで構成すれば、消費電力を小さくでき、かつディスプレイユニット107の薄型化を図ることができる。これにより、カメラ本体1の省電力化および小型化を図ることができる。
撮像素子106は、具体的には、増幅型固体撮像素子の1つであるCMOSプロセスコンパチブルのセンサ(以降CMOSセンサと略す)である。CMOSセンサの特長の1つに、エリアセンサ部のMOSトランジスタと撮像素子駆動回路、AD変換回路、画像処理回路といった周辺回路を同一工程で形成できるため、マスク枚数、プロセス工程がCCDと比較して大幅に削減できる。また、任意の画素へのランダムアクセスが可能といった特長も有し、ディスプレイ用に間引いた読み出しが容易であって、ディスプレイユニット107において高い表示レートでリアルタイム表示が行える。
撮像素子106は、上述した特長を利用し、ディスプレイ画像出力動作(撮像素子106の受光領域のうち一部を間引いた領域での読み出し)および高精彩画像出力動作(全受光領域での読み出し)を行う。
111は可動型のハーフミラー(第1のミラー部材)であり、撮影光学系103からの光束のうち一部を反射させるとともに、残りを透過させる。ハーフミラー111の屈折率はおよそ1.5であり、厚さが0.5mmである。105は撮影光学系103によって形成される物体像の予定結像面に配置されたフォーカシングスクリーン、112はペンタプリズムである。
109はフォーカシングスクリーン上に結像された物体像を観察するためのファインダレンズであり、実際には3つのファインダレンズ(図1の109−1、109−2、109−3)で構成されている。フォーカシングスクリーン105、ペンタプリズム112およびファインダレンズ109は、ファインダ光学系を構成する。
ハーフミラー111の背後(像面側)には可動型のサブミラー(第2のミラー部材)122が設けられ、ハーフミラー111を透過した光束のうち光軸L1に近い光束を反射させて焦点検出ユニット(焦点検出手段)121に導いている。サブミラー122は後述する回転軸125(図1等参照)を中心に回転し、ハーフミラー111の動きに応じてミラーボックスの下部に収納される。すなわち、サブミラー122は、ハーフミラーと一体となって動作せず、独立して撮影光路に対して進退可能となっている。
焦点検出ユニット121は、サブミラー122からの光束を受光して位相差検出方式による焦点検出を行う。
ハーフミラー111とサブミラー122で構成される光路分割系は、後述するように第1から第3の光路分割状態の間で切り替わることができるようになっている。第1の光路分割状態(第1の状態)では、撮影光学系103からの光束がハーフミラー111で反射してファインダ光学系に導かれるとともに、ハーフミラー111を透過した光束がサブミラー122で反射して焦点検出ユニット121に導かれる。
第1の光路分割状態では、ファインダレンズ109を介して上記光束によって形成された物体像を観察することができるとともに、焦点検出ユニット121において焦点検出を行わせることができる。なお、図6では、第1の光路分割状態を示している。
第2の光路分割状態(透過/反射状態)では、撮影光学系103からの光束がハーフミラー111を透過して撮像素子106に到達するとともに、ハーフミラー111で反射して焦点検出ユニット121に導かれる。第2の光路分割状態では、撮像された画像データをディスプレイユニット107上でリアルタイム表示させたり、高速連続撮影を行ったりすることができる。ここで、第2の光路分割状態では、光路分割系を動作させずに撮像素子106での撮像を行うことができるため、信号処理系での動作を高速化させることで高速連続撮影を行うことができる。
また、第2の光路分割状態では、焦点検出ユニット121において焦点検出を行わせることができる。このため、ディスプレイユニット107でのモニタ中でも、位相差検出方式による高速な焦点調節を行うことが可能である。
第3の光路分割状態(退避状態)では、撮影光学系103からの光束がダイレクトに撮像素子106に導かれる。この状態において、ハーフミラー111およびサブミラー122は、撮影光路から退避している。第3の光路分割状態は、大型のプリントなどに好適な高精細な画像を生成するために使用される。
光路分割系の駆動は、不図示の電磁モータおよびギア列を有するミラー駆動機構によって行われ、ハーフミラー111およびサブミラー122それぞれの位置を変化させることで、第1から第3の光路分割状態の間で切り換えることができる。
ここで、上述した3通りの光路分割状態を高速で切り換えるために、ハーフミラー111を透明樹脂で形成して軽量化を図っている。また、ハーフミラー111の裏面(図6においてサブミラー122側の面)には、複屈折性を持つ高分子薄膜が貼り付けられている。これは、画像をモニタ(リアルタイム表示)する場合や高速連続撮影を行う場合のように撮像素子106の全画素を用いて撮像しないことに対応させて、さらに強いローパス効果を付与するためである。
なお、ハーフミラー111の表面に、可視光の波長よりも小さなピッチを持つ微細な角錐状の周期構造を形成し、いわゆるフォトニック結晶として作用させることによって、空気と樹脂との屈折率差による光の表面反射を低減し、光の利用効率を高めることも可能である。このように構成すると、第2の光路分割状態において、ハーフミラー111の裏面および表面での光の多重反射によってゴーストが発生するのを防ぐことができる。
104は可動式の閃光発光ユニットであり、カメラ本体101に収納される収納位置とカメラ本体101から突出した発光位置との間で移動可能である。113は像面に入射する光量を調節するフォーカルプレンシャッタ、119はカメラ本体101を起動させるためのメインスイッチである。
120は2段階で押圧操作されるレリーズボタンであり、半押し操作(SW1のON)で撮影準備動作(測光動作や焦点調節動作等)が開始され、全押し操作(SW2のON)で撮影動作(撮像素子106から読み出された画像データの記録媒体への記録)が開始される。
123はアイピースシャッタ開閉スイッチ(操作手段)であり、該スイッチの操作によって後述するアイピースシャッタをファインダ光学系の光路内に進入(閉じ状態)させたり、退避(開き状態)させたりすることができる。ここで、アイピースシャッタ開閉スイッチ123はスライド式のスイッチになっており、アイピースシャッタを閉じ状態とさせる閉じ位置とアイピースシャッタを開き状態とさせる開き位置との間で移動可能となっている。そして、アイピースシャッタを開き位置もしくは閉じ位置まで移動させると、この位置で保持されるようになっている。
180は、フォーカシングスクリーン105上に特定の情報を表示させるための光学ファインダ内情報表示ユニットである。
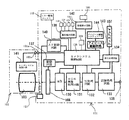
図7は、本実施例におけるカメラシステムの電気的構成を示すブロック図である。ここで、図6で説明した部材と同じ部材については同一符号を用いている。まず、物体像の撮像、記録に関する部分から説明する。
カメラシステムは、撮像系、画像処理系、記録再生系および制御系を有する。撮像系は、撮影光学系103および撮像素子106を有し、画像処理系は、A/D変換器130、RGB画像処理回路131およびYC処理回路132を有する。また、記録再生系は、記録処理回路133および再生処理回路134を有し、制御系は、カメラシステム制御回路(制御手段)135、操作検出回路(操作検出手段)136、撮像素子駆動回路137およびアイピース駆動回路143を有する。
138は、外部のコンピュータ等に接続され、データの送受信を行うために規格化された接続端子である。上述した電気回路は、不図示の小型燃料電池からの電力供給を受けて駆動する。
撮像系は、物体からの光を、撮影光学系103を介して撮像素子106の撮像面に結像させる光学処理系である。撮影光学系103内に設けられた不図示の絞りの駆動を制御するとともに、必要に応じてフォーカルプレンシャッタ113の駆動を制御することによって、適切な光量の物体光を撮像素子106で受光させることができる。
撮像素子106として、正方画素が長辺方向に3700個、短辺方向に2800個並べられ、合計約1000万個の画素数を有する撮像素子が用いられている。そして、各画素にR(赤色)G(緑色)B(青色)のカラーフィルタが交互に配置され、4画素が一組となるいわゆるベイヤー配列を構成している。
ベイヤー配列では、観察者が画像を見たときに強く感じやすいGの画素をRやBの画素よりも多く配置することで、総合的な画像性能を上げている。一般に、この方式の撮像素子を用いる画像処理では、輝度信号は主にGから生成し、色信号はR、G、Bから生成する。
撮像素子106から読み出された信号は、A/D変換器130を介して画像処理系に供給される。この画像処理系での画像処理によって画像データが生成される。
A/D変換器130は、撮像素子106の各画素から読み出された信号の振幅に応じて、例えば撮像素子106の出力信号を10ビットのデジタル信号に変換して出力する信号変換回路であり、以降の画像処理はデジタル処理にて実行される。
画像処理系は、R、G、Bのデジタル信号から所望の形式の画像信号を得る信号処理回路であり、R、G、Bの色信号を輝度信号Yおよび色差信号(R−Y)、(B−Y)にて表わされるYC信号などに変換する。
RGB画像処理回路131は、A/D変換器130の出力信号を処理する信号処理回路であり、ホワイトバランス回路、ガンマ補正回路、補間演算による高解像度化を行う補間演算回路を有する。
YC処理回路132は、輝度信号Yおよび色差信号R−Y、B−Yを生成する信号処理回路である。このYC処理回路132は、高域輝度信号YHを生成する高域輝度信号発生回路、低域輝度信号YLを生成する低域輝度信号発生回路および、色差信号R−Y、B−Yを生成する色差信号発生回路を有している。輝度信号Yは、高域輝度信号YHと低域輝度信号YLを合成することによって形成される。
記録再生系は、不図示のメモリへの画像信号の出力と、ディスプレイユニット107への画像信号の出力とを行う処理系である。記録処理回路133はメモリへの画像信号の書き込み処理および読み出し処理を行い、再生処理回路134はメモリから読み出した画像信号を再生して、ディスプレイユニット107に出力する。
また、記録処理回路133は、静止画データおよび動画データを表わすYC信号を所定の圧縮形式にて圧縮するとともに、圧縮されたデータを伸張させる圧縮伸張回路を内部に有する。圧縮伸張回路は、信号処理のためのフレームメモリなどを有しており、このフレームメモリに画像処理系からのYC信号をフレーム毎に蓄積し、複数のブロックのうち各ブロックから蓄積された信号を読み出して圧縮符号化する。圧縮符号化は、例えば、ブロック毎の画像信号を2次元直交変換、正規化およびハフマン符号化することにより行われる。
再生処理回路134は、輝度信号Yおよび色差信号R−Y、B−Yをマトリクス変換して、例えばRGB信号に変換する回路である。再生処理回路134によって変換された信号はディスプレイユニット107に出力され、可視画像として表示(再生)される。再生処理回路134およびディスプレイユニット107は、Bluetoothなどの無線通信を介して接続されていてもよく、このように構成すれば、このカメラで撮像された画像を離れたところからモニタすることができる。
一方、制御系における操作検出回路136は、メインスイッチ119、レリーズボタン120、アイピースシャッタ開閉スイッチ123、撮影モード設定スイッチ(モード設定手段)126等(他のスイッチは図7では不図示)の操作を検出して、この検出結果をカメラシステム制御回路135に出力する。
ここで、撮影モード設定スイッチ126は、カメラにおいて設定可能な複数の撮影モードのうちいずれか1つの撮影モードを選択して、設定するために操作されるスイッチである。上記撮影モードとしては、例えば、シャッタ優先撮影モード、絞り優先撮影モード、後述するリモート撮影モードおよびセルフタイマ撮影モードがある。
カメラシステム制御回路135は、操作検出回路136からの検出信号に応じてカメラシステムでの動作を制御する。また、カメラシステム制御回路135は、撮像動作を行う際のタイミング信号を生成して、撮像素子駆動回路137に出力する。
撮像素子駆動回路137は、カメラシステム制御回路135からの制御信号を受けることで撮像素子106を駆動させるための駆動信号を生成する。情報表示回路142は、カメラシステム制御回路135からの制御信号を受けて光学ファインダ内情報表示ユニット180の駆動を制御する。アイピースシャッタ駆動回路143は、カメラシステム制御回路135からの制御信号を受けてアイピースシャッタ駆動アクチュエータ(駆動手段)144の駆動を制御する。
制御系は、カメラ本体101に設けられた各種スイッチの操作に応じて撮像系、画像処理系および記録再生系での駆動を制御する。例えば、レリーズボタン120の操作によってSW2がONとなった場合、制御系(カメラシステム制御回路135)は、撮像素子106の駆動、RGB画像処理回路131の動作、記録処理回路133の圧縮処理などを制御する。さらに、制御系は、情報表示回路142を介して光学ファインダ内情報表示ユニット180の駆動を制御することによって、光学ファインダ内での表示(表示セグメントの状態)を変更する。
次に、撮影光学系103の焦点調節動作に関して説明する。
カメラシステム制御回路135はAF制御回路140と接続している。また、レンズ装置102をカメラ本体101に装着することで、カメラシステム制御回路135は、マウント接点101a、102aを介してレンズ装置102内のレンズシステム制御回路141と接続される。そして、AF制御回路140およびレンズシステム制御回路141と、カメラシステム制御回路135とは、特定の処理の際に必要となるデータを相互に通信する。
焦点検出ユニット121(焦点検出センサ167)は、撮影画面内の所定位置に設けられた焦点検出領域での検出信号をAF制御回路140に出力する。AF制御回路140は、焦点検出ユニット121からの出力信号に基づいて焦点検出信号を生成し、撮影光学系103の焦点調節状態(デフォーカス量)を検出する。そして、AF制御回路140は、検出したデフォーカス量を撮影光学系103の一部の要素であるフォーカシングレンズの駆動量に変換し、フォーカシングレンズの駆動量に関するデータを、カメラシステム制御回路135を介してレンズシステム制御回路141に送信する。
ここで、移動する物体に対して焦点調節を行う場合、AF制御回路140は、レリーズボタン120が全押し操作されてから実際の撮像制御が開始されるまでのタイムラグを勘案して、フォーカシングレンズの適切な停止位置を予測する。そして、予測した停止位置へのフォーカシングレンズの駆動量に関するデータをレンズシステム制御回路141に送信する。
一方、カメラシステム制御回路135が、撮像素子106の出力信号に基づいて物体の輝度が低く、十分な焦点検出精度が得られないと判定したときには、閃光発光ユニット104又は、カメラ本体101に設けられた不図示の白色LEDや蛍光管を駆動することによって物体を照明する。
レンズシステム制御回路141はフォーカシングレンズの駆動量に関するデータを受信すると、レンズ装置102内の不図示の駆動機構を駆動することによってフォーカシングレンズを光軸L1方向に移動させる。なお、上述したようにフォーカシングレンズが液体レンズ等で構成されている場合には、界面形状を変化させることになる。これにより、撮影光学系103の焦点調節動作が行われる。
AF制御回路140において物体にピントが合ったことが検出されると、この情報はカメラシステム制御回路135に送信される。このとき、レリーズボタン120の全押し操作によってSW2がON状態になれば、上述したように撮像系、画像処理系および記録再生系によって撮影動作が行われる。
一方、201はアイピースシャッタ開閉検出器(開閉検出手段)、145はハーフミラー111およびサブミラー122を第1から第3の光路分割状態の間で動作させるためのミラー駆動ユニットである。
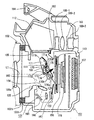
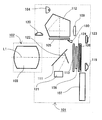
図1から図5は本実施例におけるカメラシステムの断面図である。なお、これらの図においては、レンズ装置102の一部を示している。また、図6で説明した部材と同じ部材については同一符号を用いている。
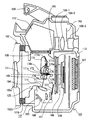
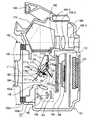
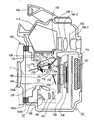
ここで、図1は第2の光路分割状態にあるときのカメラシステムの断面図、図2は第1の光路分割状態および第2の光路分割状態の間で切り替わる途中の状態にあるカメラシステムの断面図である。図3は第1の光路分割状態にあるときのカメラシステムの断面図、図4は第1の光路分割状態および第3の光路分割状態の間で切り替わる途中の状態にあるカメラシステムの断面図、図5は第3の光路分割状態にあるときのカメラシステムの断面図である。
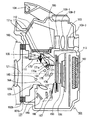
以下、ハーフミラー111およびサブミラー122で構成される光路分割系が上述した第1の光路分割状態にあるときの図(図3)を用いてカメラシステムの構成について説明する。
図3において、101はカメラ本体、102はレンズ装置である。レンズ装置102は、レンズ側マウント102bを介してカメラ側マウント101bに装着される。103aは撮影光学系103を構成する複数のレンズのうち最も像面側に位置する撮影レンズ、105はファインダ光学系のフォーカシングスクリーンである。107はディスプレイユニット、163はアイピースシャッタ(ファインダシャッタ)である。
164は焦点検出ユニット121における光束の取り込み窓となるコンデンサーレンズ、165はコンデンサーレンズ164からの光束を反射させる反射ミラーである。166は反射ミラー165で反射した光束を焦点検出センサ122上で結像させるための再結像レンズ、122は焦点検出センサである。
111は可動型のハーフミラーで、不図示のハーフミラー受け板に保持されている。ハーフミラー受け板の両側縁部(紙面奥方向および紙面手前方向)には、それぞれピン173が設けられているとともに、一方の側縁部(紙面奥方向)にはピン174が設けられている。ここで、ハーフミラー111とピン173、174は一体的に移動するようになっている。
170はハーフミラー駆動レバー、171はハーフミラー支持アームである。ハーフミラー駆動レバー170は、カメラ本体101に固定された回転軸170aに対して回転可能に支持され、ハーフミラー支持アーム171はカメラ本体101に固定された回転軸171aに対して回転可能に支持されている。
また、ハーフミラー支持アーム171は接続部171bを介してミラーボックスの対向する壁面側に設けられた略同一形状の構造と接続されている。不図示のハーフミラー受け板の両側に設けられたピン173は、ハーフミラー支持アーム171の先端に設けられた貫通孔部171cに係合している。これにより、ハーフミラー111は、ハーフミラー受け板を介して貫通孔部171cを中心に回動可能となっている。
ハーフミラー受け板は、ピン173とピン174の中間位置において不図示のトーションバネによって矢印A方向に付勢されており、該トーションバネの付勢力はハーフミラー受け板を介してハーフミラー111にも働いている。
第1の光路分割状態では、ミラーストッパ160、161がハーフミラー111の移動領域内に進入した状態にあるため、ハーフミラー111は、上記トーションバネの付勢力を受けてミラーストッパ160、161に当接している。このとき、ピン173とハーフミラー駆動レバー170の第1のカム面170bとの間および、ピン174とハーフミラー駆動レバー170の第2のカム面170cとの間には若干の隙間がある。これにより、ハーフミラー111は、図3に示す状態で位置決めされている。
なお、ミラーストッパ160、161は、不図示のミラー駆動機構の駆動によってハーフミラー111の移動領域内に進入したり、退避したりすることができる。また、ミラーストッパ160、161は、ハーフミラー111の移動領域内にあるか移動領域外にあるかを問わず、撮影光路外(撮影光束に影響を与えない位置)に位置している。さらに、後述するミラーストッパ175、176も同様に撮影光路外に位置している。
一方、サブミラー122は回転軸125を中心に回転可能となっており、第1の光路分割状態では、図3に示すようにハーフミラー111からの透過光を焦点検出ユニット121(コンデンサーレンズ164)側に反射させる位置に保持されている。
第1の光路分割状態において、撮影光学系103からの光束のうち一部の光束はハーフミラー111で反射してファインダ光学系に導かれ、残りの光束はハーフミラー111を透過しサブミラー122で反射して焦点検出ユニット121に導かれる。
図3に示す状態にあるミラーストッパ160、161がハーフミラー111の移動領域から退避したとき、ハーフミラー111は不図示のトーションバネによる矢印A方向の付勢力を受けて図2に示す状態となる。このとき、トーションバネの付勢力により、ピン173はハーフミラー駆動レバー170の第1のカム面170bに当接し、ピン174はハーフミラー駆動レバー170の第2のカム面170cに当接する。
そして、ハーフミラー駆動レバー170の回転に応じて第1のカム面170bと第2のカム面170cに沿ってピン173、174がそれぞれ摺動し、ハーフミラー111の姿勢が変化する。すなわち、ハーフミラー駆動レバー170の回転に伴ってハーフミラー支持アーム171が回転し、ハーフミラー駆動レバー170およびハーフミラー支持アーム171に対してピン173、174を介して連結されている不図示のハーフミラー受け板とハーフミラー111が一体的に動作する。
ハーフミラー駆動レバー170およびハーフミラー支持アーム171が図3中反時計方向に回動することによって、ハーフミラー111は図1に示すようにミラーストッパ175、176に当接する。このとき、ハーフミラー111は不図示のトーションバネによる矢印A方向の付勢力を受けているため、図1に示す状態、すなわち第2の光路分割状態に保持される。
ここで、ハーフミラー111が第1の光路分割状態から第2の光路分割状態に移行するときには、サブミラー122が回転軸125を中心に図3中時計方向に回動することによってミラーボックスの下部まで移動する。すなわち、ハーフミラー111が第1の光路分割状態から第2の光路分割状態に移行する前に、サブミラー122がミラーボックスの下部へ移動することで、ハーフミラー111がサブミラー122に衝突するのを避けている。
第2の光路分割状態では、図1に示すように撮影レンズ103aからの光束のうち一部の光束がハーフミラー111で反射して焦点検出ユニット121に導かれるとともに、残りの光束がハーフミラー111を透過して撮像素子106に到達する。
一方、第1の光路分割状態(図3)から第3の光路分割状態(図5)に移行する際には、ハーフミラー駆動レバー170が図3中時計方向に回転することにより、ハーフミラー111を撮影光路に対してカメラ本体101の上方(フォーカシングスクリーン105側)に退避させる。また、回転軸125を中心としてサブミラー122を図3中時計方向に回転させることにより、サブミラー122を撮影光路に対してカメラ本体101の下側に退避させる。
第3の光路分割状態では、図5に示すように撮影レンズ103aからの光束が撮像素子106に到達する。
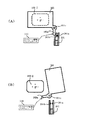
次に、図8を用いて、アイピースシャッタとアイピースシャッタ開閉検出器の構成を説明する。図8は、図1の光射出面側(撮影者の眼球側)から見たときのアイピースシャッタ等の構造を示したものである。図8では、アイピースシャッタ163とアイピースシャッタ開閉検出器201の動きを見やすくするために、カメラ本体101の外装とファインダレンズ109−3は示している。
図8(A)では、アイピースシャッタ163がファインダ光学系の光路内に進入した状態を示し、図8(B)では、アイピースシャッタ163がファインダ光学系の光路から退避した状態を示している。
アイピースシャッタ163は、カメラ本体101に設けられた回転軸101cを中心に回転可能となっており、回転動作によりファインダ光学系の光路内に進入した閉じ位置と上記光路から退避した開き位置との間で移動可能となっている。
アイピースシャッタには図8Aと図8Bに、図7に示すアイピース駆動アクチュエータ144があり、カメラシステム制御回路135からの信号に応じてアイピースシャッタの開閉駆動を行う。
アイピースシャッタ163には突起部163aが形成されている。突起部163aは、不図示の動力伝達機構を介してアイピース駆動アクチュエータ144に連結されており、アイピース駆動アクチュエータ144からの駆動力を受けることで回転軸101cを中心に回転する。これにより、アイピースシャッタ163が回転軸101cを中心に回転する。
突起部163aの近傍にはアイピースシャッタ開閉検出器201が配置されている。アイピースシャッタ開閉検出器201は、2つの端子部201a、201bを有している。図8(B)に示すように自由状態では端子部201a、201bが互いに離れて非接触の状態(OFF状態)となっている。また、図8(A)に示すようにアイピースシャッタ開閉検出器201の端部がアイピースシャッタ163によって押し込まれたときには、端子部201a、201bが接触して導通状態(ON状態)となる。
アイピースシャッタ開閉検出器201は、図7に示すようにカメラシステム制御回路135に接続されており、カメラシステム制御回路135はアイピースシャッタ開閉検出器201からのON/OFF信号に基づいてアイピースシャッタ163の動作状態を判別する。
使用者操作によってアイピースシャッタ開閉スイッチ123が閉じ位置に移動すると、操作検出回路136においてアイピースシャッタ開閉スイッチ123の操作状態が検出され、この検出信号がカメラシステム制御回路135に送られる。そして、カメラシステム制御回路135は、アイピース駆動回路143に駆動信号を送り、アイピース駆動アクチュエータ144を駆動させる。これにより、アイピースシャッタ163はアイピース駆動アクチュエータ144からの駆動力を受けることで、ファインダ光学系の光路内に進入する(閉じ状態)。
アイピースシャッタ163が閉じ状態になると、図8(A)に示すように突起部163aがアイピースシャッタ開閉検出器201の端部を押し込む。これにより、端子部201bが端子部201aに接触してアイピースシャッタ開閉検出器201が通電状態となり、カメラシステム制御回路135においてアイピースシャッタ163が閉じ状態にあることが検出される。
一方、使用者操作によってアイピースシャッタ開閉スイッチ123が開き位置に移動すると、操作検出回路136においてアイピースシャッタ開閉スイッチ123の操作状態が検出され、この検出信号がカメラシステム制御回路135に送られる。そして、カメラシステム制御回路135は、アイピース駆動回路143に駆動信号を送り、アイピース駆動アクチュエータ144を駆動させる。これにより、アイピースシャッタ163はアイピース駆動アクチュエータ144からの駆動力を受けることで、ファインダ光学系の光路から退避する(開き状態)。
アイピースシャッタ163が開き状態になると、図8(B)に示すように突起部163aがアイピースシャッタ開閉検出器201の端部から離れた状態となる。これにより、アイピースシャッタ開閉検出器201は非導通状態となり、カメラシステム制御回路135においてアイピースシャッタ163が開き状態にあることが検出される。
ここで、後述するように第2および第3の光路分割状態では、アイピースシャッタ163が図8(A)に示す閉じ状態となり、第1の光路分割状態では、アイピースシャッタ163が図8(B)に示す開き状態となる。
上述した構成のカメラシステムにおける撮影シーケンスについて、図9を用いて説明する。なお、図9に示す動作はカメラシステム制御回路135において行われる。
ステップS100では、メインスイッチ119がON状態であるか否かを判別する。そして、メインスイッチ119がON状態となったときにはステップS101に進む。ステップS101では、カメラシステム内の電気回路を起動する。ステップS200では、ファインダ切り換えサブルーチンを実行する。ここで、ステップS200における動作の詳細は後述する。
ステップS102では、操作検出回路136を介してアイピースシャッタ開閉スイッチ123の操作が行われたか否かを判別する。アイピースシャッタ開閉スイッチ123の操作が検出されたときには、ステップS200に戻ってファインダ切り換え動作を実行する。一方、アイピースシャッタ開閉スイッチ123の操作が検出されなかったときには、ステップS103に進む。
ステップS103では、カメラ本体101に設けられた不図示のリモート撮影・セルフタイマ撮影設定スイッチの操作によってリモート撮影・セルフタイマ撮影モードが設定されているか否かを判別する。
リモート撮影とは、カメラ本体101とは別体のリモートコントロール装置の操作によって撮影準備動作および撮影動作を行うものであり、撮影者本人も被写体となって撮影を行いたいときなどに用いられる場合が多い。セルフタイマ撮影とは、レリーズボタン120が全押し操作されてから所定時間経過後に撮影動作が行われるものであり、撮影者本人も被写体となって撮影を行いたいときなどに用いられる場合が多い。
ステップS103でリモート撮影・セルフタイマ撮影が設定されていると判断したときには、ステップS113に進む。
ステップS113において、カメラシステム制御回路135はアイピース駆動回路143に駆動信号を送り、アイピースシャッタ駆動アクチュエータ144を駆動させることによってアイピースシャッタ163を閉じ状態とさせる。アイピースシャッタ163が閉じ状態になると、アイピースシャッタ開閉検出器201からカメラシステム制御回路135にアイピースシャッタ閉信号が送られ、カメラシステム制御回路135において確実にアイピースシャッタ163が閉じ状態にあることが確認される。
リモート撮影・セルフタイマ撮影では、ファインダ光学系の接眼部を撮影者が覗かないため、カメラ本体101内にファインダ逆入射光(接眼部からファインダ光学系内に入り込む外光)が入りやすい。ファインダ逆入射光が焦点検出ユニット121に到達した場合には検出誤差の要因となり、高精度な焦点検出の阻害要因となる恐れがある。また、ファインダ逆入射光が測光系に到達した場合、すなわち本実施例では撮像素子106の出力に基づいて測光動作を行うため、ファインダ逆入射光が撮像素子106に到達した場合には、測光検出誤差の要因となる恐れがある。
このため、本実施例では、ステップS113においてアイピースシャッタ163を閉じ状態とすることで、ファインダ逆入射光の発生を防止して高精度な焦点検出と測光を実現している。
ステップS103でリモート撮影・セルフタイマ撮影が設定されていないと判断したときには、ステップS104に進む。
ステップS104では、レリーズボタン120の半押し操作によってSW1がON状態になっているか否かを判別する。ここで、SW1がOFF状態の場合にはステップS102に戻り、アイピースシャッタ開閉スイッチ123の操作が行われたか否かを判別する。一方、SW1がON状態である場合には、ステップS105に進む。
ステップS105では、カメラシステム制御回路135からAF制御回路140にAF開始信号を送る。これにより、AF制御回路140は、焦点検出ユニット121での検出動作を開始させるとともに、焦点検出ユニット121の出力(焦点検出結果)に基づいて焦点調節動作を開始する。
ステップS106では、レリーズボタン120の全押し操作によってSW2がON状態にあるか否かを判別する。ここで、SW2がOFF状態である場合には再びステップS104に進み、SW1がON状態であるか否かを判別する。一方、SW2がON状態である場合には、ステップS107に進む。
ステップS107では、カメラシステム制御回路135からアイピース駆動回路143に駆動信号を送り、アイピースシャッタ駆動アクチュエータ144を駆動することでアイピースシャッタ163を閉じ状態にさせる。なお、ステップS113でアイピースシャッタ163を閉じ状態としている場合には、ステップS107での動作は行わない。
アイピースシャッタ163が閉じ状態になると、アイピースシャッタ開閉検出器201からカメラシステム制御回路135にアイピースシャッタ閉信号が送られ、カメラシステム制御回路135において確実にアイピースシャッタ163が閉じたことが確認される。
ステップS108では、カメラシステム制御回路135からミラー駆動ユニット145にミラー駆動開始信号を送り、ハーフミラー111およびサブミラー122を図5に示す位置に移動させて第3の光路分割状態とする。第3の光路分割状態では、図5に示すようにハーフミラー111およびサブミラー122が撮影光路から退避するため、撮影レンズ103aからの光束がダイレクトに撮像素子106に到達する。
ステップS109において、カメラシステム制御回路135は、レンズシステム制御回路141を介してレンズ装置102内に設けられた不図示の絞りの駆動を制御する。具体的には、測光結果に基づいて決定された絞り値となるように絞りの駆動を制御する。また、必要に応じてフォーカルプレンシャッタ113の駆動を制御する。具体的には、測光結果に基づいて決定されたシャッタ速度となるようにフォーカルプレンシャッタ113の駆動を制御する。これにより、適切な光量の物体光が、撮影光学系103を通過して撮像素子106の撮像面で結像する。
そして、カメラシステム制御回路135は、撮像素子駆動回路137に撮像開始信号を送ることにより、撮像素子106を駆動させる。これにより、撮像素子106において受光量に応じた電気信号が蓄積されるとともに、蓄積された信号が読み出される(撮像動作)。
ステップS110では、撮像素子106から読み出された信号が、A/D変換器130を介してRGB画像処理回路131に送られ、ホワイトバランス処理、ガンマ補正、補間演算処理が施される。さらに、YC処理回路132でYC処理がなされて画像処理が完了する。この画像処理によって高精彩な画像を得ることができる。
ステップS111では、画像データを記録処理回路133に送り、所定の圧縮形式で圧縮した後、記録媒体に記録する。
ステップS112では、画像データを再生処理回路134に送り、ディスプレイユニット107において撮影画像のプレビュー表示を行う。プレビュー表示後は、ファインダ切り換えサブルーチン(ステップS200)に戻り、アイピースシャッタ開閉スイッチ123の操作状態に応じて光路分割状態を変更する。
上述したフローでは、カメラシステムがリモート撮影・セルフタイマ撮影モードに設定されている場合および、カメラ本体101(光路分割系)が第3の光路分割状態にある場合において、アイピースシャッタ163を閉じ状態とすることによってファインダ逆入射光がカメラ本体101内に入り込まないようにしている。
ここで、第3の光路分割状態では、光を透過させるハーフミラー111がフォーカシングスクリーン105の下側に配置されている。このため、ファインダ逆入射光がファインダ光学系およびハーフミラー111を透過して撮像素子106の受光面に到達するおそれがある。そこで、本実施例では、カメラ本体101が第3の光路分割状態にある場合にアイピースシャッタ163を閉じ状態とすることによってファインダ逆入射光が撮像素子106の受光面に到達しないようにしている。
しかも、本実施例では、リモート撮影・セルフタイマ撮影モードの設定状態や光路分割状態に応じて自動的にアイピースシャッタ163が閉じ状態となるため、手動でアイピースシャッタを閉じ状態とさせる場合に比べてカメラの使い勝手を向上させることができる。
次に、ファインダ切り換えサブルーチン(ステップS200)について、図10を用いて説明する。
ステップS201において、カメラシステム制御回路135は操作検出回路136を介してアイピースシャッタ開閉スイッチ123の操作状態(閉じ位置又は開き位置)を判別する。アイピースシャッタ開閉スイッチ123が閉じ位置にある場合には、ステップS202に進む。アイピースシャッタ開閉スイッチ123が閉じ位置にある場合、カメラシステム制御回路135はカメラ本体101をEVFモード(図1に示す状態)に設定するためにステップS202〜ステップS210の動作を行う。
ここで、ステップS202〜ステップS210までの動作は、OVFモード(図3に示す状態)からEVFモードに切り換える動作である。
撮影者がアイピースシャッタ開閉スイッチ123を閉じ位置に移動させることは、撮影者がファインダ光学系を使う意思がなく、ディスプレイユニット107での表示画像を見ながら撮影することを望んでいることになる。このため、アイピースシャッタ開閉スイッチ123が閉じ位置にある場合にEVFモードに移行することは、撮影者の意図に適切に応じることになる。
ステップS202において、カメラシステム制御回路135はアイピース駆動回路143に駆動信号を送り、アイピース駆動アクチュエータ144を駆動することにより、アイピースシャッタ163を閉じ状態とさせる。アイピースシャッタ163が閉じ状態になると、アイピースシャッタ開閉検出器201からカメラシステム制御回路135にアイピースシャッタ閉信号が送られ、カメラシステム制御回路135において確実にアイピースシャッタ163が閉じ状態にあることが確認される。
ステップS203では、光学ファインダ内情報表示ユニット180の駆動を停止させることで、ファインダ視野内での表示状態を非表示状態(消灯)とする。ステップS203では、すでにアイピースシャッタ163が閉じ状態となっているため、ファインダ視野内での表示を消すことにより、カメラ本体101における電力消費を抑えて、電池の消耗を抑制することができる。
ステップS204では、ハーフミラー111を第1の光路分割状態から第2の光路分割状態に移動させるのに備えて、撮影光路上に配置されたサブミラー122を回転させてミラーボックス下部に移動させる。
ステップS205では、ミラーストッパ160、161をハーフミラー111の移動領域から退避させる。ミラーストッパ160、161が退避した後、ステップS206でハーフミラー駆動レバー170を図3中反時計方向に回転させると、ミラー駆動機構内の不図示のバネの付勢力によりハーフミラー111は図2に示す状態を経て第2の光路分割状態(図1)にまで駆動される。ハーフミラー111が第2の光路分割状態となることで、撮影レンズ103aからの光束がハーフミラー111で反射して、焦点検出ユニット121に導かれることになる。
第2の光路分割状態では、ピン173とハーフミラー駆動レバー170の第1のカム面170bの間および、ピン174とハーフミラー駆動レバー170の第2のカム面170cの間には若干の隙間が生じ、ハーフミラー111はミラーストッパ175、176に当接して位置決めされる。ここで、第2の光路分割状態にあるハーフミラー111の反射面の位置が、第1の光路分割状態にあるサブミラー122の反射面の位置と同じとなるように、ミラーストッパ175、176が配置されている。
このように構成することによって、OVFモードとEVFモードで焦点検出ユニット121に入射する光束の位置がずれてしまうのを防止でき、焦点検出ユニット121での検出動作を正確に行わせることができる。
撮影レンズ103aからの光束がハーフミラー111を透過する場合、上記光束はハーフミラー111において屈折作用を受けるため、ハーフミラー111を透過した光束が撮像素子106上で形成する物体像のピント位置は、ハーフミラー111を透過しない場合に比べて若干ずれる。このため、ステップS207では、上記ずれを補正するためのピント補正モードを起動する。
第1の光路分割状態にあるときに焦点検出ユニット121から出力される焦点検出信号は、第3の光路分割状態において撮影レンズ103aからの光束が撮像素子106上で結像したときの結像状態を示すようになっている。これに対して、第2の光路分割状態においてピント補正モードが設定されているときには、撮影レンズ103aからの光束がハーフミラー111を透過して撮像素子106上で結像したときの結像状態を示すように、上記焦点検出信号を補正している。このため、第2の光路分割状態におけるフォーカスレンズの合焦位置は、第1および第3の光路分割状態での合焦位置に対して焦点検出信号を補正した分だけずれることになる。
したがって、EVFモードにおいてSW2をオンにして撮影動作を行う場合、すなわち、光路分割系を第2の光路分割状態から第3の光路分割状態に切り換える場合には、フォーカルプレンシャッタ113の先幕駆動機構のチャージとともに、フォーカスレンズの位置を上述したズレの分だけ補正する。この後、フォーカルプレンシャッタ113を所定時間だけ開き状態とすることで、撮像素子106による撮像動作を行う。
上述したように構成することで、EVFモード(第2の光路分割状態)においてはディスプレイユニット107でピントのあった画像を確認することができ、第3の光路分割状態で撮影を行ったときにもピントのあった撮影画像を得ることができる。
ステップS208では、フォーカルプレンシャッタ113の先幕だけを走行させてバルブ露光状態にすることで、撮影光学系103を通過した物体光を連続的に撮像素子106に到達させ、ディスプレイユニット107上で画像を表示させるための撮像が可能な状態とする。
ステップS209では、ディスプレイユニット107の電源を投入する。ステップS210では、撮影光学系103によって形成された物体像に対して撮像素子106による撮像動作を連続的に行い、撮像素子106から読み出されて画像処理された画像データをディスプレイユニット107上でリアルタイム表示させる。そして、OVFモードからEVFモードへの切り替え動作を終了する。
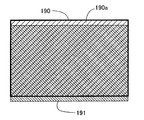
ここで、EVFモードである第2の光路分割状態では、撮影レンズ103aからの光束がハーフミラー111で屈折してから撮像素子106に到達する。このため、図13に示すように、第2の光路分割状態における撮像素子106の受光領域190が、第3の光路分割状態における撮像素子106の受光領域191に対して撮像素子106の上下方向(図1の上下方向)で僅かにずれてしまうことがある。すなわち、第2の光路分割状態においてディスプレイユニット107でリアルタイム表示される画像が、第3の光路分割状態で撮影された画像と一致せずにずれてしまうことがある。
ここで、領域190のうち領域191と重ならない領域190aは、ディスプレイユニット107上でリアルタイム表示されるものの、第3の光路分割状態での撮影によって得られた画像には含まれない領域となる。
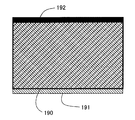
本実施例のカメラでは、図14に示すように、ディスプレイユニット107上でリアルタイム表示される画像領域のうち領域190aに相当する領域192をブラックアウトさせて、領域190全体を表示させないようにしている。この処理は、再生処理回路134において行われる。
これにより、実際に撮影された画像の中に、ディスプレイユニット107でリアルタイム表示された画像が含まれていないといった不具合を避けることができる。
次に、図10のステップS201において、アイピースシャッタ開閉スイッチ123が開き位置にあると判断したときの動作について説明する。すなわち、カメラをEVFモードからOVFモードに切り換える際の動作について説明する。
アイピースシャッタ開閉スイッチ123は開き位置にある場合には、カメラシステム制御回路135はOVFモードが選択されていると判別し、カメラをOVFモードに応じた状態とするために以下に説明する動作を行う。
ここで、アイピースシャッタ163を開けるということは、撮影者が光学ファインダを使うことを望んでいることを意味する。このため、アイピースシャッタ開閉スイッチ123が開き位置にあることを検知してOVFモードに移行することは、撮影者の意図に適切に応じることができる。
ステップS220では、ディスプレイユニット107の電源をオフにするとともに、撮像素子106による撮像動作を停止させる。
ステップS221では、フォーカルプレンシャッタ113の後幕を走行させてシャッタを閉じ状態とし、撮影に備えて先幕および後幕の駆動機構をチャージする。ステップS222では、後のステップで行われるハーフミラー111の移動を可能にするために、ミラーストッパ160、161をハーフミラー111の移動領域から退避させる。
ステップS223では、ハーフミラー駆動レバー170を図1中時計回りに回転させて、ハーフミラー111だけを図2の状態→図3の状態→図4の状態→図5の状態の順に移動させる。このとき、ハーフミラー111は、第1の光路分割状態(図3)を経て、第3の光路分割状態(図5)となる。
ステップS224では、ミラーストッパ160、161をハーフミラー111の移動領域内に進入させ、ハーフミラー111を位置決めするための所定位置まで移動させる。
上述したように、ミラーストッパ160、161をハーフミラー111の移動領域から退避させてからハーフミラー111を第3の光路分割状態まで移動させ、その後ミラーストッパ160、161をハーフミラー111の移動領域内に進入させているため、ハーフミラー111が移動する際にミラーストッパ160、161と衝突することはない。これにより、OVFモードからEVFモードに切り換える際の機構的信頼性を高くできる。
ステップS225では、ハーフミラー駆動レバー170を図5中反時計回りに回転させて、ハーフミラー111を第3の光路分割状態(図5の状態)から図4の状態を経て、第1の光路分割状態(図3の状態)に移動させる。ここで、ハーフミラー111は、ミラー駆動機構内の不図示のバネの付勢力(図3の矢印Aに示す力)を受けることにより、ミラーストッパ160、161に当接した状態となる。
ステップS226において、カメラシステム制御回路135は、アイピース駆動回路143およびアイピース駆動アクチュエータ144を介してアイピースシャッタ163を開き状態とさせる。アイピースシャッタ163が開き状態になると、図8に示すアイピースシャッタ開閉検出器201からカメラシステム制御回路135にアイピースシャッタ開信号が送られ、カメラシステム制御回路135においてアイピースシャッタ163が確実に開いたことが確認される。
ステップS227において、カメラシステム制御回路135は、カメラシステム内に設けられたAF/MF切換スイッチ(不図示)の操作状態に基づいて、マニュアルフォーカスモードに設定されているか否かを判別する。ここで、マニュアルフォーカスモードに設定されていればステップS205に移行し、マニュアルフォーカスモードに設定されておらず、オートフォーカスモードに設定されていればステップS228に進む。
マニュアルフォーカスモードに設定されている場合には、焦点検出ユニット121を動作させる必要がなく、また、OVFを用いるよりもEVFを用いる方が背景(被写体像)のボケ具合を正確に把握することができる。このため、マニュアルフォーカスモードに設定されているときには、ディスプレイユニット107でのリアルタイム表示を行うために、ステップS205に進む。
ここで、ステップS205に進む場合、アイピースシャッタ163を閉じ状態にさせる。これにより、EVFを用いた被写体観察を優先させることができるとともに、ファインダ光学系からの逆入射光がリアルタイム表示される画像に悪影響を与えるのを抑制することができる。
ステップS228では、サブミラー122を撮影光路内に進入させて、ハーフミラー111を透過した物体光を焦点検出ユニット121に導く所定の位置にセットする。ここで、ステップS220からステップS227までの処理を行う間、サブミラー122は第2の光路分割状態(図1)での位置、すなわち撮影光路から退避した位置にあり、ステップS228に進んだときに動作することになる。
ステップS229において、カメラシステム制御回路135は光学ファインダ内情報表示ユニット180を駆動させて、ファインダ内情報表示を点灯させる。そして、EVFモードからOVFモードへの切り換え動作を終了する。
本実施例では、撮像画像をディスプレイユニット107で表示させる場合、すなわちEVFモードの場合には、ハーフミラー111およびサブミラー122を有する光路分割系が第2の光路分割状態(図1)となっており、撮影レンズ103aからの光束を焦点検出ユニット121に導いている。これにより、EVFモードのときにも、焦点検出ユニット121での位相差検出方式による焦点検出に基づいて、高速な焦点調節動作を行わせることができる。
ファインダ切り換えサブルーチン(ステップS200)において、OVFモードおよびEVFモード間の切り換えは、アイピースシャッタ開閉スイッチ123の状態に基づいて判別している。
撮影者がファインダ光学系を使用して撮影を行おうとする場合、必ずアイピースシャッタ開閉スイッチ123を開き位置に移動させて、アイピースシャッタ163を開き状態にする。つまり、アイピースシャッタ開閉スイッチ123が開き位置にあることは、ファインダ光学系を使用しようとする撮影者の意図を反映したものであり、これに伴ってOVFモードに設定することは理にかなっている。
一方、撮影者がアイピースシャッタ開閉スイッチ123を閉じ位置に移動させた場合には、ファインダ光学系を使用する意思がないことを意味する。つまり、アイピースシャッタ開閉スイッチ123が閉じ位置にあることは、電子画像表示を使用しようとする撮影者の意図を反映したものであり、これに伴ってEVFモードに設定することは理にかなっている。
以上のように、アイピースシャッタ開閉スイッチ123の状態(閉じ位置又は開き位置)に応じて、OVFモードおよびEVFモード間の切り換えを行うことで、撮影者の意図に適切に応じることができる。
次に、焦点検出ユニット121における焦点検出のための信号処理について説明する。
撮影レンズ103aから射出した光束(物体光)は、第2の光路分割状態ではハーフミラー111で反射し、第1の光路分割状態ではサブミラー122で反射した後、ミラーボックスの下部に設けられたコンデンサーレンズ164に入射する。そして、コンデンサーレンズ164に入射した光束は、反射ミラー165で偏向し、再結像レンズ166の作用によって焦点検出センサ167上に物体の2次像を形成する。
焦点検出センサ167には少なくとも2つの画素列が備えられている。2つの画素列それぞれから出力される信号波形を比較すると、撮影光学系103によって形成された物体像の焦点検出領域上での結像状態に応じて、相対的に横シフトした状態が観測される。上記結像状態が前ピンか後ピンかで、出力信号波形のシフト方向が逆になり、相関演算などの手法を用いてシフト方向およびシフト量(位相差)を検出するのが焦点検出の原理である。
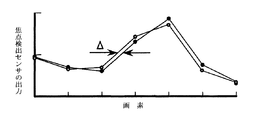
図11と図12は、AF制御回路140に入力された焦点検出センサ167の出力信号波形を表す図である。横軸は画素の並びを示し、縦軸は焦点検出センサ167の出力値を示している。図11では、物体像にピントが合っていない状態での出力信号波形を示し、図12では、物体像にピントが合った状態での出力信号波形を示している。
一般に、焦点検出に用いられる光束は絞り開放状態での結像光束と同じではなく、結像光束の一部となっている。すなわち、焦点検出を行う場合には、暗いFナンバーの光束が用いられる。また、カメラ内の機構の誤差を考慮すると、撮像素子106の位置と焦点検出センサ167の位置が厳密な意味で光学的に共役とはいえない。
このため、物体像にピントが合った状態であっても、図12に示すように2つの出力信号波形の間には、僅かの初期位相差Δが残る。該初期位相差Δは、上述したピント補正モード(図10のステップS207参照)において焦点検出信号に対する補正で用いられるものとは異なるものである。
ここで、2つの像の相関演算で検出された位相差から初期位相差Δを差し引けば真の位相差を知ることができるため、初期位相差Δの存在自体は通常問題とならない。
本実施例では、上述したように焦点検出に用いられる光束が、第1の光路分割状態においてサブミラー122から導かれる場合と、第2の光路分割状態においてハーフミラー111から導かれる場合とがある。この場合、第1の光路分割状態(図3)でのサブミラー122の反射面位置と、第2の光路分割状態(図1)でのハーフミラー111の反射面位置が、機構精度上完全には一致せず、光路分割状態に応じて初期位相差Δの値が異なってしまう。このため、相関演算で検出された位相差から一定の初期位相差Δを差し引いただけでは、第1および第2の光路分割状態での真の位相差を知ることができない。
通常の部品加工精度では、2つの反射面位置が、該反射面の垂直方向に略30μm程度ずれる可能性がある。ここで、反射面位置のずれをメカ的に小さくしようとすると、部品加工のためのコストが極めて高くなってしまう。
そこで、本実施例では、第1の光路分割状態と第2の光路分割状態で初期位相差Δをそれぞれ設定し、光路分割状態に応じた初期位相差Δを用いることにより、焦点検出センサ167の出力信号に対して補正を行うようにしている。これにより、光路分割状態に応じた真の位相差を知ることができ、該位相差に基づいて精度の良い焦点検出を行うことができる。
このように、初期位相差を考慮に入れて一組の信号の同一性を判定することで撮影光学系が合焦状態にあるか否かを判別できる。また、相関演算を用いた公知の手法、例えば特公平5−88445号公報に開示されている手法を用いて位相差を検出することにより、デフォーカス量を求めることができる。そして、得られたデフォーカス量を撮影光学系103のフォーカシングレンズの駆動量に換算し、該駆動量の分だけフォーカシングレンズを駆動させれば撮影光学系の焦点調節を自動で行うことができる。
位相差検出方式では、フォーカシングレンズの駆動量があらかじめ分かるので、通常、合焦位置までのレンズ駆動はほぼ一回で済み、極めて高速な焦点調節が可能である。
本実施例によれば、ファインダ光学系を用いて物体像を観察する場合(OVFモードの場合)に加えて、ディスプレイユニット107で物体像をリアルタイム表示させる場合(EVFモードの場合)にも、焦点検出ユニット121において位相差検出方式による焦点検出を行うことができ、撮影光学系の焦点調節動作を高速で行うことができる。また、第2の光路分割状態(図1)で連続撮影や動画撮影を行うようにすれば、これらの撮影においても高速な焦点調節が可能となる。さらに、従来のように2つの焦点検出ユニットを設ける必要はないため、コストアップとなることもない。
本実施例において、第2の光路分割状態(図1)では、撮影レンズ103aからの光束を焦点検出ユニット121に導き、焦点検出ユニット121において位相差検出方式による焦点検出を行わせているが、該光路分割状態では撮像素子106にも撮影レンズ103aからの光束が到達するため、撮像素子106の出力に基づいてコントラスト検出方式による焦点調節を合わせて行うようにしてもよい。すなわち、位相差検出方式による焦点検出結果に基づいてフォーカスレンズを駆動させた後に、コントラスト検出方式による焦点調節を行うことで、フォーカスレンズを合焦位置まで精度良く移動させることができる。
ここで、コントラスト検出方式による焦点調節とは、撮像光学系103によって形成された物体像の鮮鋭度を、撮像素子106の出力に対して所定の関数で評価することによって求め、関数値が極値をとるようにフォーカスレンズの光軸上の位置を調節するものである。
評価関数としては、隣接する輝度信号の差の絶対値を焦点検出領域内で加算するものや、隣接する輝度信号の差の2乗を焦点検出領域内で加算するもの、あるいはR、G、Bの各画像信号のうち隣接する信号の差に対して上記と同様に処理するもの等がある。
一方、本実施例では、アイピースシャッタ開閉スイッチ123の操作位置(開き位置および閉じ位置)に応じて、EVFモード(第2の光路分割状態)およびOVFモード(第1の光路分割状態)間の切り換えを自動的に行うようになっているため、使用者にとって使い勝手の良いカメラシステムとなる。しかも、EVFモードではアイピースシャッタを閉じ状態としているため、ファインダ光学系からの逆入射光が焦点検出ユニット121内に取り込まれるのを確実に防ぐことができ、焦点検出ユニット121での位相差検出方式による焦点検出の精度を高めることができる。また、第3の光路分割状態で撮影を行う際にアイピースシャッタ163を閉じ状態にしてファインダ光学系からの逆入射光を防いでいるため、該逆入射光によって撮影画像に悪影響を与えるのを防止して、高品位な撮影画像を得ることができる。
また、リモート撮影及びセルフタイマ撮影を行うときに、アイピースシャッタ163を閉じ状態にしてファインダ光学系からの逆入射光を防いでいるため、位相差検出方式による焦点検出の精度を高めることができるととにも、高品位な撮影画像を得ることができる。
本実施例では、カメラシステム制御回路135が、アイピース駆動回路143を介してアイピース駆動アクチュエータ144の駆動を制御することによって、アイピースシャッタ163を開閉動作させているが、撮影者の操作(手動)によってアイピースシャッタ163を開閉動作させるようにしてもよい。例えば、アイピースシャッタ163に連結されるレバー部材を設け、撮影者がレバー部材を操作することによってアイピースシャッタ163を開閉させることができる。この場合、カメラシステム制御回路135は、アイピースシャッタ開閉検出器201からの出力信号に基づいてアイピースシャッタ163の開閉状態を検出し、該検出結果に応じてOVFモードおよびEVFモード間の切り換え動作(図10に示す動作)を行うようにすることができる。