JP2005291978A - 半導体センサ - Google Patents
半導体センサ Download PDFInfo
- Publication number
- JP2005291978A JP2005291978A JP2004108639A JP2004108639A JP2005291978A JP 2005291978 A JP2005291978 A JP 2005291978A JP 2004108639 A JP2004108639 A JP 2004108639A JP 2004108639 A JP2004108639 A JP 2004108639A JP 2005291978 A JP2005291978 A JP 2005291978A
- Authority
- JP
- Japan
- Prior art keywords
- semiconductor
- diaphragm
- pressure
- ring oscillator
- sensor
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Pending
Links
Images







Landscapes
- Pressure Sensors (AREA)
- Measuring Fluid Pressure (AREA)
Abstract
【解決手段】応力、圧力、加速度検出部である半導体表面にリングオシレータを形成する。それらのリングオシレータの発振するデジタル・パルス信号は、応力、圧力、加速度の変化に従って、周波数が変化する。これらのデジタル・パルス信号から応力、圧力、加速度を算出することによって、上記課題を解決する。
【選択図】図1
Description
一方、自動車タイヤ空気圧センサは安全上、低検出精度のものは好ましくない。すなわち、ダイヤフラム・キャパシタ型自動車タイヤ空気圧センサは、安全上、十分な検出精度を保つために、十分なキャパシタ面積確保が必要となる。このため、ポリシリコン電極キャパシタタイプのセンサチップは、安全性能上、チップサイズ縮小が困難である。
また、半導体が歪んで結晶格子が引き伸ばされるとトランジスタの電流駆動能力が向上することが知られている(例えば、非特許文献1第14頁を参照)。
さらに、ダイヤフラム部からの出力をそのままデジタル演算回路に取り込むため、従来のアナログ出力では必須だったオペレーション・アンプと増幅率規定用の高精度抵抗素子が不用となる。このため、セル数を減らすことができ、より一層、チップ小型化を可能にするという効果もある。
さらに、信号処理部とセンサ部が同時に製造可能となるので、従来の半導体製造工程とコ なお、ダイヤフラム部にリングオシレータを形成する構造は、圧力センサのみならず、半導体加速度センサ、半導体応力センサにも利用可能である。
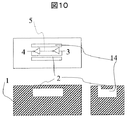
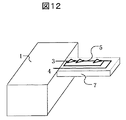
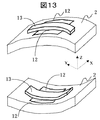
半導体ダイヤフラム2の領域のみの模式図を図3に示す。本半導体ダイヤフラム2が圧力を受け、図4に示したように歪むと、出力4のパルスの周波数が減少する。この様子を図6に示す。図6は出力4における経過時間に対する出力電圧の変化を示している。本図に見られるように、出力は、デジタル・パルスである。図6において、実線は半導体ダイヤフラム2が圧力を受けていない状態の出力4のパルス波形を表し、点線は半導体ダイヤフラム2が圧力を受けて歪んだ状態でのリングオシレータ5からの出力4のパルス波形を表している。
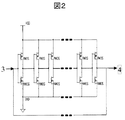
半導体ダイヤフラム2が歪むとパルス周波数が増減する理由、および、リングオシレータ5の構成例は、本発明実施例1の項にて述べたので省略する。
半導体ダイヤフラム2が歪むとパルス周波数が増減する理由、および、リングオシレータ5の構成例は、本発明実施例1の項にて述べたので省略する。
半導体ダイヤフラム2が歪むとパルス周波数が増減する理由、および、リングオシレータ5の構成例は、本発明実施例1の項にて述べたので省略する。
本半導体センサにおいては、リングオシレータ5を構成するMOSトランジスタの個数を増やすほど、加速度センサの感度を高めることができる。すなわち、トランジスタを微細化するほど、加速度センサの感度を高めることができる。さらに、パルス数を計数する時間を長くするほど加速度センサの感度を高めることができる。
本発明による半導体センサの一次出力信号は、ハイ・ローの2値デジタル電圧であるため、雑音耐性が高く、アナログ増幅器は不用である。したがって、増幅率を規定するための高精度なディスクリート抵抗素子も不用となり、半導体センサと同一チップ上に、容易に配置可能なデジタル信号処理回路を作り込むことができる。
Claims (4)
- ダイヤフラムを半導体で形成し、上記ダイヤフラム表面にリングオシレータを配し、上記リングオシレータの発振するパルス信号をデジタル・カウンタに入力することを特徴とする半導体圧力センサ。
- ダイヤフラムを半導体で形成し、上記ダイヤフラム表面にリングオシレータを配し、上記リングオシレータの発振するパルス信号をデジタル・カウンタに入力することを特徴とする半導体加速度センサ。
- 梁を半導体で形成し、上記梁表面にリングオシレータを配し、上記リングオシレータの発振するパルス信号をデジタル・カウンタに入力することを特徴とする半導体応力センサ。
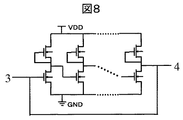
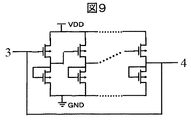
- 請求項1から3において、上記リングオシレータはMOSトランジスタで構成し、上記MOSトランジスタの電流を駆動するチャネル方向が、上記ダイヤフラムや上記梁の引張り応力作用方向に対して垂直な方向であることを特徴とする半導体センサ。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2004108639A JP2005291978A (ja) | 2004-04-01 | 2004-04-01 | 半導体センサ |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2004108639A JP2005291978A (ja) | 2004-04-01 | 2004-04-01 | 半導体センサ |
Publications (1)
| Publication Number | Publication Date |
|---|---|
| JP2005291978A true JP2005291978A (ja) | 2005-10-20 |
Family
ID=35325062
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2004108639A Pending JP2005291978A (ja) | 2004-04-01 | 2004-04-01 | 半導体センサ |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP2005291978A (ja) |
Cited By (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2011112419A (ja) * | 2009-11-25 | 2011-06-09 | Alps Electric Co Ltd | フォースセンサ及びその実装方法 |
| US9089055B2 (en) | 2012-09-11 | 2015-07-21 | Seiko Epson Corporation | Electronic device, method of manufacturing the same, and oscillator |
| KR20160002489A (ko) * | 2014-06-30 | 2016-01-08 | 서울시립대학교 산학협력단 | 전계효과트랜지스터형 압력 센서 및 그 제조 방법 |
Citations (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPS5717830A (en) * | 1980-05-22 | 1982-01-29 | Siemens Ag | Semiconductor pressure sensor |
| JPH033370A (ja) * | 1989-05-31 | 1991-01-09 | Honda Motor Co Ltd | 半導体センサ |
| JPH0310164A (ja) * | 1989-06-08 | 1991-01-17 | Honda Motor Co Ltd | 半導体センサ |
| JP2000009547A (ja) * | 1998-06-22 | 2000-01-14 | Hitachi Ltd | 温度センサおよびそれを用いた液晶表示装置並びに投写型液晶表示装置 |
-
2004
- 2004-04-01 JP JP2004108639A patent/JP2005291978A/ja active Pending
Patent Citations (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPS5717830A (en) * | 1980-05-22 | 1982-01-29 | Siemens Ag | Semiconductor pressure sensor |
| JPH033370A (ja) * | 1989-05-31 | 1991-01-09 | Honda Motor Co Ltd | 半導体センサ |
| JPH0310164A (ja) * | 1989-06-08 | 1991-01-17 | Honda Motor Co Ltd | 半導体センサ |
| JP2000009547A (ja) * | 1998-06-22 | 2000-01-14 | Hitachi Ltd | 温度センサおよびそれを用いた液晶表示装置並びに投写型液晶表示装置 |
Cited By (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2011112419A (ja) * | 2009-11-25 | 2011-06-09 | Alps Electric Co Ltd | フォースセンサ及びその実装方法 |
| US9089055B2 (en) | 2012-09-11 | 2015-07-21 | Seiko Epson Corporation | Electronic device, method of manufacturing the same, and oscillator |
| KR20160002489A (ko) * | 2014-06-30 | 2016-01-08 | 서울시립대학교 산학협력단 | 전계효과트랜지스터형 압력 센서 및 그 제조 방법 |
| KR101593179B1 (ko) | 2014-06-30 | 2016-02-12 | 서울시립대학교 산학협력단 | 전계효과트랜지스터형 압력 센서 및 그 제조 방법 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| US8356521B2 (en) | Pressure sensor device | |
| US11604104B2 (en) | Integrated piezoresistive and piezoelectric fusion force sensor | |
| CN101458134A (zh) | 半导体压力传感器及其制造方法、半导体装置和电子设备 | |
| US6167761B1 (en) | Capacitance type pressure sensor with capacitive elements actuated by a diaphragm | |
| JP5280609B2 (ja) | 半導体装置およびその製造方法 | |
| US7253488B2 (en) | Piezo-TFT cantilever MEMS | |
| JP5222457B2 (ja) | センサおよびセンサモジュール | |
| JP2009068863A (ja) | 赤外線検出素子及びそれを用いた赤外線イメージセンサ | |
| JP2011158317A (ja) | 圧力センサ | |
| JPWO2017068711A1 (ja) | Mems装置 | |
| JP2005291978A (ja) | 半導体センサ | |
| US7368715B2 (en) | Semiconductor apparatus and infrared light sensor | |
| US20090283846A1 (en) | Backside controlled mems capacitive sensor and interface and method | |
| JPH10281862A (ja) | 振動式赤外線センサとその製造方法 | |
| JP2014013735A (ja) | 圧力スイッチ | |
| JPH0241184B2 (ja) | ||
| US8984953B2 (en) | Solid state pressure sensor | |
| US7246526B2 (en) | Pressure sensor, method of fabricating the same, and method of calibrating the same | |
| JPH03229470A (ja) | 半導体圧力センサ | |
| JP2015155797A (ja) | サーモパイル、及びそれを用いたサーモパイル式センサ並びに赤外線センサ | |
| Weigold et al. | Thick single crystal Si lateral resonant devices integrated with a conventional circuit process | |
| Li et al. | Effects of Initial Stress on SiGe Capacitive Pressure Sensor | |
| JPH08162646A (ja) | 力学量センサ | |
| JP2007292485A (ja) | 圧力センサ及びその製造方法 | |
| JPH11304617A (ja) | 半導体センサ |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| RD04 | Notification of resignation of power of attorney |
Free format text: JAPANESE INTERMEDIATE CODE: A7424 Effective date: 20060515 |
|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20070329 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20091225 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20100119 |
|
| A02 | Decision of refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A02 Effective date: 20100518 |