JP2005291141A - 可変バルブ装置の基準位置学習装置 - Google Patents
可変バルブ装置の基準位置学習装置 Download PDFInfo
- Publication number
- JP2005291141A JP2005291141A JP2004109632A JP2004109632A JP2005291141A JP 2005291141 A JP2005291141 A JP 2005291141A JP 2004109632 A JP2004109632 A JP 2004109632A JP 2004109632 A JP2004109632 A JP 2004109632A JP 2005291141 A JP2005291141 A JP 2005291141A
- Authority
- JP
- Japan
- Prior art keywords
- intake air
- air amount
- reference position
- variable valve
- detected
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Pending
Links
Images





Classifications
-
- Y—GENERAL TAGGING OF NEW TECHNOLOGICAL DEVELOPMENTS; GENERAL TAGGING OF CROSS-SECTIONAL TECHNOLOGIES SPANNING OVER SEVERAL SECTIONS OF THE IPC; TECHNICAL SUBJECTS COVERED BY FORMER USPC CROSS-REFERENCE ART COLLECTIONS [XRACs] AND DIGESTS
- Y02—TECHNOLOGIES OR APPLICATIONS FOR MITIGATION OR ADAPTATION AGAINST CLIMATE CHANGE
- Y02T—CLIMATE CHANGE MITIGATION TECHNOLOGIES RELATED TO TRANSPORTATION
- Y02T10/00—Road transport of goods or passengers
- Y02T10/10—Internal combustion engine [ICE] based vehicles
- Y02T10/12—Improving ICE efficiencies
Landscapes
- Valve Device For Special Equipments (AREA)
- Output Control And Ontrol Of Special Type Engine (AREA)
Abstract
【課題】 可変バルブ装置の制御基準位置を精度良く学習する。
【解決手段】 クランク角センサ35の出力信号とカム角センサ34の出力信号とに基づいてカム軸位相(クランク軸26に対する吸気カム軸30の回転位相)を検出し、エンジン運転条件が所定の運転条件のときに、エアフローメータの出力等に基づいて検出した検出吸入空気量が設計上の基準吸入空気量に一致するように可変バルブタイミング装置32を制御し、検出吸入空気量が基準吸入空気量に一致したときのカム軸位相を制御基準位置として学習する。そして、学習した制御基準位置に対する現在のカム軸位相の実進角量(つまり吸気バルブタイミングの実進角量)が目標進角量に一致するように可変バルブタイミング装置32をフィードバック制御する。
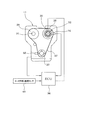
【選択図】 図2
【解決手段】 クランク角センサ35の出力信号とカム角センサ34の出力信号とに基づいてカム軸位相(クランク軸26に対する吸気カム軸30の回転位相)を検出し、エンジン運転条件が所定の運転条件のときに、エアフローメータの出力等に基づいて検出した検出吸入空気量が設計上の基準吸入空気量に一致するように可変バルブタイミング装置32を制御し、検出吸入空気量が基準吸入空気量に一致したときのカム軸位相を制御基準位置として学習する。そして、学習した制御基準位置に対する現在のカム軸位相の実進角量(つまり吸気バルブタイミングの実進角量)が目標進角量に一致するように可変バルブタイミング装置32をフィードバック制御する。
【選択図】 図2
Description
本発明は、内燃機関の可変バルブ装置を制御する際の制御基準位置を学習する可変バルブ装置の基準位置学習装置に関するものである。
近年、車両に搭載される内燃機関においては、出力向上、燃費節減、排気エミッション低減等を目的として、吸気バルブや排気バルブのバルブ開閉特性(バルブタイミング、バルブリフト量、バルブ開弁期間等)を可変する可変バルブ装置を搭載したものがある。
例えば、バルブタイミングを可変する可変バルブ装置は、クランク軸に対するカム軸の回転位相(カム軸位相)を変化させることで、カム軸によって開閉駆動される吸気バルブや排気バルブのバルブタイミングを変化させるようにしている。その際、クランク角センサの出力信号とカム角センサの出力信号とに基づいてカム軸位相を検出し、可変バルブ装置が機械的な可動限界位置(例えば最遅角位置)に制御されたときのカム軸位相を基準位置として学習する。そして、この基準位置に対する現在のカム軸位相の実進角量(つまりバルブタイミングの実進角量)が目標進角量に一致するように可変バルブ装置を制御することで、バルブタイミングの制御精度を確保するようにしたものがある。
このような可変バルブ装置を備えた内燃機関では、バルブタイミングを可変することで吸入空気量を調整することができる。しかし、上述したように可変バルブ装置の機械的な可動限界位置を可変バルブ制御の基準位置とするシステムでは、製造ばらつきや経時変化等による可変バルブ装置毎の機械的な可動限界位置(つまり基準位置)のばらつきや内燃機関毎の吸入空気量のばらつきによって、可変バルブ制御の基準位置と吸入空気量との関係がずれてしまい、可変バルブ制御による吸入空気量の制御精度が低下するという欠点がある。
そこで、例えば、特許文献1(特許第3161152号公報)に記載されているように、可変バルブ装置の機械的な最遅角位置における吸気管負圧を基準にして、最遅角位置よりも進角側に制御上の基準位置を設定し、所定の運転状態のときにバルブタイミングの進角量と吸気管負圧の変化量とを用いて基準位置を補正するようにしたものがある。
特許第3161152号公報(第6頁〜第7頁、第6図等)
しかし、上記特許文献1の可変バルブ制御システムは、可変バルブ装置の機械的な最遅角位置における吸気管負圧を基準にして、制御上の基準位置の設定や補正を行うため、機械的な可動限界位置を持たない可変バルブ装置では、可変バルブ制御の基準位置を設定することができないという欠点がある。
本発明は、このような事情を考慮してなされたものであり、従って本発明の目的は、可変バルブ装置の機械的な可動限界位置を用いずに制御基準位置を学習することができると共に、可変バルブ装置や内燃機関の製造ばらつきや経時変化等の影響を排除した精度の良い制御基準位置を学習することができ、可変バルブ制御による吸入空気量制御の精度を向上させることができる可変バルブ装置の基準位置学習装置を提供することにある。
上記目的を達成するために、本発明の請求項1に記載の可変バルブ装置の基準位置学習装置は、内燃機関の吸気バルブ及び/又は排気バルブのバルブ開閉特性を可変する可変バルブ装置を制御する際の制御基準位置を学習するシステムにおいて、内燃機関の吸入空気量を吸入空気量検出手段により検出し、その検出吸入空気量が所定の基準吸入空気量に一致するときの可変バルブ装置の制御位置を制御基準位置として基準位置学習手段により学習するようにしたものである。
このようにすれば、可変バルブ装置の機械的な可動限界位置を用いずに制御基準位置を学習することができ、機械的な可動限界位置を持たない可変バルブ装置にも採用することができる。しかも、製造ばらつきや経時変化等による可変バルブ装置毎の機械的な可動限界位置のばらつきや内燃機関毎の吸入空気量のばらつきがあっても、制御基準位置における吸入空気量を一定値(基準吸入空気量)とすることができ、可変バルブ装置や内燃機関の製造ばらつき等の影響を排除した精度の良い制御基準位置を学習することができ、可変バルブ制御による吸入空気量制御の精度を向上させることができる。
ところで、内燃機関の運転条件(例えば、回転速度、スロットル開度等)によって吸入空気量が変化するため、吸入空気量に及ぼす影響が大きく異なる運転条件で制御基準位置(検出吸入空気量が基準吸入空気量に一致する制御位置)を学習したのでは、制御基準位置を精度良く学習することができない。
そこで、請求項2のように、内燃機関が所定の運転条件のときに検出吸入空気量が基準吸入空気量に一致するように可変バルブ装置を制御して制御基準位置を学習するようにすると良い。このようにすれば、吸入空気量に及ぼす影響が同じ運転条件で制御基準位置を学習することができ、制御基準位置を精度良く学習することができる。
また、吸入空気量の検出方法は、例えば、請求項3のように、内燃機関の吸気管内の空気流量を検出するエアフローメータの出力に基づいて検出吸入空気量を算出するようにしても良い。内燃機関の気筒内に吸入される吸入空気量に応じて吸気管内の空気流量が変化してエアフローメータの出力が変化するため、エアフローメータの出力を用いれば、検出吸入空気量を精度良く算出することができる。
また、請求項4のように、内燃機関の吸気管圧力を検出する吸気管圧力センサの出力に基づいて前記検出吸入空気量を算出するようにしても良い。内燃機関の気筒内に吸入される吸入空気量に応じて吸気管圧力が変化して吸気管圧力センサの出力が変化するため、吸気管圧力センサの出力を用いれば、検出吸入空気量を精度良く算出することができる。
また、請求項5のように、内燃機関の筒内圧力を検出する筒内圧力センサの出力に基づいて検出吸入空気量を算出するようにしても良い。内燃機関の気筒内に吸入される吸入空気量に応じて筒内圧力が変化して筒内圧力センサの出力が変化するため、筒内圧力センサの出力を用いれば、検出吸入空気量を精度良く算出することができる。この場合、代表気筒のみに筒内圧力センサを設けるようにしても良いが、各気筒毎に筒内圧力センサを設ければ検出吸入空気量の算出精度を向上させることができる。
また、請求項6のように、内燃機関の排出ガスの空燃比又は酸素濃度を検出する排出ガスセンサの出力と燃料噴射量とに基づいて検出吸入空気量を算出するようにしても良い。内燃機関の吸入空気量と燃料噴射量とに応じて排出ガスの空燃比や酸素濃度が変化して排出ガスセンサの出力が変化するため、排出ガスセンサの出力と燃料噴射量とを用いれば、検出吸入空気量を精度良く算出することができる。
これら請求項3乃至請求項6の吸入空気量の検出方法は、それぞれ単独で実施しても良いが、適宜組み合わせて実施すれば吸入空気量の検出精度を向上させることができる。
ところで、大気圧、温度等の環境条件によって検出吸入空気量が変化するため、基準吸入空気量を設定したときの基準環境条件と異なる環境条件で検出した検出吸入空気量を用いて制御基準位置(検出吸入空気量が基準吸入空気量に一致する制御位置)を学習したのでは、制御基準位置の学習値に環境条件の相違による誤差が生じてしまう。
そこで、請求項7のように、大気圧、吸気温、冷却水温のうちの少なくとも1つに基づいて検出吸入空気量を補正するようにすると良い。このようにすれば、環境条件の相違による誤差を排除した検出吸入空気量を用いて制御基準位置を学習することができ、環境条件の相違による誤差を排除した精度の良い制御基準位置を学習することができる。
以下、本発明を吸気バルブの可変バルブタイミング装置に適用した2つの実施例1,2を説明する。
本発明の実施例1を図1乃至図5に基づいて説明する。
まず、図1に基づいてエンジン制御システム全体の概略構成を説明する。内燃機関であるエンジン11の吸気管12の最上流部には、エアクリーナ13が設けられ、このエアクリーナ13の下流側に、吸気管12内の空気流量を検出するエアフローメータ14が設けられている。このエアフローメータ14の下流側には、DCモータ等によって開度調節されるスロットルバルブ15と、スロットル開度を検出するスロットル開度センサ16とが設けられている。
まず、図1に基づいてエンジン制御システム全体の概略構成を説明する。内燃機関であるエンジン11の吸気管12の最上流部には、エアクリーナ13が設けられ、このエアクリーナ13の下流側に、吸気管12内の空気流量を検出するエアフローメータ14が設けられている。このエアフローメータ14の下流側には、DCモータ等によって開度調節されるスロットルバルブ15と、スロットル開度を検出するスロットル開度センサ16とが設けられている。
更に、スロットルバルブ15の下流側には、サージタンク17が設けられ、このサージタンク17には、吸気管12内の圧力を検出する吸気管圧力センサ18が設けられている。また、サージタンク17には、エンジン11の各気筒に空気を導入する吸気マニホールド19が設けられ、各気筒の吸気マニホールド19の吸気ポート近傍に、それぞれ燃料を噴射する燃料噴射弁20が取り付けられている。また、エンジン11のシリンダヘッドには、各気筒毎に点火プラグ21が取り付けられ、各点火プラグ21の火花放電によって筒内の混合気に着火される。
一方、エンジン11の排気管22には、排出ガス中のCO,HC,NOx等を浄化する三元触媒等の触媒23が設けられ、この触媒23の上流側に、排出ガスの空燃比又はリッチ/リーン等を検出する排出ガスセンサ24(空燃比センサ、酸素センサ等)が設けられている。また、エンジン11のシリンダブロックには、冷却水温を検出する冷却水温センサ25が取り付けられている。
また、図2に示すように、エンジン11は、クランク軸26からの動力がタイミングチェーン27(又はタイミングベルト)により各スプロケット28、29を介して吸気側カム軸30と排気側カム軸31とに伝達されるようになっている。更に、吸気側カム軸30側には、モータ駆動式の可変バルブタイミング装置32が設けられている。この可変バルブタイミング装置32によってクランク軸26に対する吸気側カム軸30の回転位相(カム軸位相)を可変することで、吸気側カム軸30によって開閉駆動される吸気バルブ33のバルブタイミングを可変するようになっている。
また、吸気側カム軸30の外周側には、所定のカム角毎にカム角信号を出力するカム角センサ34が取り付けられている。一方、クランク軸26の外周側には、所定のクランク角毎にクランク角信号を出力するクランク角センサ35が取り付けられている。
前述した各種センサの出力信号は、エンジン制御回路(以下「ECU」と表記する)36に入力される。このECU36は、マイクロコンピュータを主体として構成され、内蔵されたROM(記憶媒体)に記憶された各種のエンジン制御プログラムを実行することで、エンジン運転状態に応じて燃料噴射弁20の燃料噴射量や点火プラグ21の点火時期を制御する。
次に、図3に基づいて可変バルブタイミング装置32の概略構成を説明する。可変バルブタイミング装置32の位相可変機構37は、吸気側カム軸30と同心状に配置された内歯付きのアウタギヤ38と、このアウタギヤ38の内周側に同心状に配置された外歯付きのインナギヤ39と、これらアウタギヤ38とインナギヤ39との間に配置されて両者に噛み合う遊星ギヤ40とから構成されている。アウタギヤ38は、クランク軸26と同期して回転するスプロケット28と一体的に回転するように設けられ、インナギヤ39は、吸気側カム軸30と一体的に回転するように設けられている。また、遊星ギヤ40は、アウタギヤ38とインナギヤ39に噛み合った状態でインナギヤ39の回りを円軌道を描くように旋回することで、アウタギヤ38の回転力をインナギヤ39に伝達する役割を果たすと共に、インナギヤ39の回転速度(吸気側カム軸30の回転速度)に対する遊星ギヤ40の旋回速度(公転速度)を変化させることで、アウタギヤ38に対するインナギヤ39の回転位相(つまりカム軸位相)を調整するようになっている。
一方、エンジン11には、遊星ギヤ40の旋回速度を可変するためのモータ41が設けられている。このモータ41の回転軸42は、吸気側カム軸30、アウタギヤ38及びインナギヤ39と同軸上に配置され、このモータ41の回転軸42と遊星ギヤ40の支持軸43とが、径方向に延びる連結部材44を介して連結されている。これにより、モータ41の回転に伴って、遊星ギヤ40が支持軸43を中心に回転(自転)しながらインナギヤ39の外周の円軌道を旋回(公転)できるようになっている。また、モータ41には、モータ41の回転速度RM(回転軸42の回転速度)を検出するモータ回転速度センサ45(図1参照)が取り付けられている。
この可変バルブタイミング装置32は、吸気バルブタイミング(吸気バルブ33のバルブタイミング)を現状維持する場合には、モータ41の回転速度RMを吸気側カム軸30の回転速度RCに一致させて、遊星ギヤ40の公転速度をインナギヤ39の回転速度(アウタギヤ38の回転速度)に一致させる。これにより、アウタギヤ38に対するインナギヤ39の回転位相(つまりカム軸位相)が現状維持されて、吸気バルブタイミングが現状維持される。
そして、吸気バルブタイミングを進角する場合には、モータ41の回転速度RMを吸気側カム軸30の回転速度RCよりも速くして、遊星ギヤ40の公転速度をインナギヤ39の回転速度よりも速くする。これにより、アウタギヤ38に対するインナギヤ39の回転位相が進角されて、吸気バルブタイミングが進角される。
一方、吸気バルブタイミングを遅角する場合には、モータ41の回転速度RMを吸気側カム軸30の回転速度RCよりも遅くして、遊星ギヤ40の公転速度をインナギヤ39の回転速度よりも遅くする。これにより、アウタギヤ38に対するインナギヤ39の回転位相が遅角されて、吸気バルブタイミングが遅角される。
ECU36は、後述する図4及び図5に示す可変バルブタイミング制御用の各プログラムを実行することで、カム角信号とクランク角信号とに基づいてカム軸位相VT(クランク軸26に対する吸気カム軸30の回転位相)を検出し、後述する制御基準位置VT0 に対する現在のカム軸位相VTの実進角量ΔVT(つまり吸気バルブタイミングの実進角量ΔVT)が目標進角量ΔVTtgに一致するように可変バルブタイミング装置32をフィードバック制御する。
その際、ECU36は、エンジン運転条件が所定の運転条件のときに、エアフローメータ14の出力等に基づいて検出した検出吸入空気量が設計上の基準吸入空気量に一致するように可変バルブタイミング装置32を制御し、検出吸入空気量が基準吸入空気量に一致したときのカム軸位相VTを制御基準位置VT0 として学習することで、検出吸入空気量が基準吸入空気量に一致したときの可変バルブタイミング装置32の制御位置を制御基準位置VT0 として学習する。
以下、ECU36が実行する図4及び図5に示す可変バルブタイミング制御用の各プログラムの処理内容を説明する。
[可変バルブタイミング制御]
図4に示す可変バルブタイミング制御プログラムは、エンジン運転中に所定周期で実行される。本プログラムが起動されると、まず、ステップ101で、カム角センサ34から出力されるカム角信号の入力時刻と、クランク角センサ35から出力されるクランク角信号の入力時刻を読み込んだ後、ステップ102に進み、クランク角信号の入力時刻とカム角信号の入力時刻とに基づいてカム軸位相VT(クランク軸26に対する吸気カム軸30の回転位相)を算出する。
図4に示す可変バルブタイミング制御プログラムは、エンジン運転中に所定周期で実行される。本プログラムが起動されると、まず、ステップ101で、カム角センサ34から出力されるカム角信号の入力時刻と、クランク角センサ35から出力されるクランク角信号の入力時刻を読み込んだ後、ステップ102に進み、クランク角信号の入力時刻とカム角信号の入力時刻とに基づいてカム軸位相VT(クランク軸26に対する吸気カム軸30の回転位相)を算出する。
この後、ステップ103に進み、現在の可変バルブタイミング装置32の制御位置が制御基準位置VT0 であるか否かを、現在のカム軸位相VTが制御基準位置VT0 であるか否かによって判定する。
その結果、制御基準位置VT0 であると判定された場合には、ステップ104に進み、後述する図5に示す制御基準位置学習プログラムを実行して、制御基準位置VT0 を学習する。この後、ステップ105に進み、ECU36のバックアップRAM(図示せず)等の書き換え可能な不揮発性メモリに記憶されている制御基準位置VT0 の学習値を、今回の制御基準位置VT0 の学習値で更新した後、ステップ106に進む。
一方、上記ステップ103で、制御基準位置VT0 ではないと判定された場合には、制御基準位置VT0 の学習及び更新(ステップ104及び105)を行わずに、ステップ106に進む。
このステップ106では、エンジン運転状態等に応じた吸気バルブタイミングの目標進角量ΔVTtgをマップ等を用いて算出し、この目標進角量ΔVTtgを制御基準位置VT0 に加算してカム軸位相VTの目標値VTtgを算出する。
VTtg=VT0 +ΔVTtg
この後、ステップ107に進み、カム軸位相VTが目標値VTtgに一致するように可変バルブタイミング装置32を制御することで、制御基準位置VT0 に対する吸気バルブタイミングの実進角量ΔVTが目標進角量ΔVTtgに一致するように可変バルブタイミング装置32を制御する。
この後、ステップ107に進み、カム軸位相VTが目標値VTtgに一致するように可変バルブタイミング装置32を制御することで、制御基準位置VT0 に対する吸気バルブタイミングの実進角量ΔVTが目標進角量ΔVTtgに一致するように可変バルブタイミング装置32を制御する。
[制御基準位置学習]
図4のステップ104で実行される図5に示す制御基準位置学習プログラムは、特許請求の範囲でいう基準位置学習手段としての役割を果たす。本プログラムが起動されると、まず、ステップ201で、学習可能な運転状態(例えばアイドル運転状態等)であるか否かを判定し、学習可能な運転状態ではないと判定されれば、ステップ202以降の制御基準位置学習に関する処理を実行することなく、本プログラムを終了する。
図4のステップ104で実行される図5に示す制御基準位置学習プログラムは、特許請求の範囲でいう基準位置学習手段としての役割を果たす。本プログラムが起動されると、まず、ステップ201で、学習可能な運転状態(例えばアイドル運転状態等)であるか否かを判定し、学習可能な運転状態ではないと判定されれば、ステップ202以降の制御基準位置学習に関する処理を実行することなく、本プログラムを終了する。
一方、上記ステップ201で、学習可能な運転状態であると判定された場合には、ステップ202以降の制御基準位置学習に関する処理を次のようにして実行する。まず、ステップ202で、スロットル開度を所定開度に固定する。更に、ISC(アイドルスピードコントロール)バルブを備えたシステムでは、ISCバルブ開度を所定開度に固定する。この場合、スロットル開度やISCバルブ開度を固定する上記所定開度は、エンストを回避するために、通常のアイドル回転速度よりも少し高めのアイドル回転速度になるように設定することが好ましい。更に、吸気バルブタイミング以外の他の吸気系の制御量(バルブリフト量、EGR開度等)も所定値に固定する。
このようにして、アイドル運転中のエンジン運転条件を所定の運転条件に固定した後、ステップ203に進み、カム軸位相VTが設計上の基準位置になるように可変バルブタイミング装置32を制御する。ここで、設計上の基準位置は、例えば、設計段階で全部品の寸法誤差や組付誤差を最小値(0)と仮定して設定した基準位置であり、制御基準位置VT0 の初期値は、この設計上の基準位置に設定されている。
この後、ステップ204に進み、エアフローメータ14の出力に基づいて検出吸入空気量を算出する。エンジン11の気筒内に吸入される吸入空気量に応じて吸気管12内の空気流量が変化してエアフローメータ14の出力が変化するため、エアフローメータ14の出力を用いれば、検出吸入空気量を精度良く算出することができる。更に、このステップ204では、大気圧センサ46で検出した大気圧、吸気温センサ47で検出した吸気温、冷却水温センサ25で検出した冷却水温のうちの少なくとも1つに基づいて検出吸入空気量を補正する。これにより、現在の環境条件で検出した検出吸入空気量を、後述する設計上の基準吸入空気量を設定したときの基準環境条件における検出吸入空気量に補正する。このステップ204の処理が特許請求の範囲でいう吸入空気量検出手段としての役割を果たす。
この後、ステップ205に進み、検出吸入空気量が設計上の基準吸入空気量に一致しているか否かを判定する。ここで、設計上の基準吸入空気量は、例えば、設計段階で全部品の寸法誤差や組付誤差を最小値(0)と仮定して設定した基準位置における吸入空気量である。
その結果、検出吸入空気量が基準吸入空気量に一致していると判定された場合には、制御基準位置VT0 を設計上の基準位置に保持したまま、本プログラムを終了する。
一方、上記ステップ205で、検出吸入空気量が基準吸入空気量と一致していないと判定された場合には、ステップ206に進み、検出吸入空気量が基準吸入空気量に一致するように可変バルブタイミング装置32を制御する。
この後、ステップ207に進み、検出吸入空気量が基準吸入空気量に一致したときのカム軸位相VTを制御基準位置VT0 として学習することで、検出吸入空気量が基準吸入空気量に一致したときの可変バルブタイミング装置32の制御位置を制御基準位置VT0 として学習する。この制御基準位置VT0 の学習値は、ECU36のバックアップRAM等の書き換え可能な不揮発性メモリに記憶され、エンジン停止中も記憶保持され、次回のエンジン運転時にも制御基準位置VT0 の学習値を使用できるようになっている。
以上説明した本実施例1では、検出吸入空気量が設計上の基準吸入空気量に一致するときの可変バルブタイミング装置32の制御位置を制御基準位置VT0 として学習するようにしたので、可変バルブタイミング装置32の機械的な可動限界位置(最遅角位置や最進角位置)を用いずに制御基準位置VT0 を学習することができ、機械的な可動限界位置を持たない可変バルブ装置にも採用することができる。しかも、製造ばらつきや経時変化等による可変バルブタイミング装置32毎の機械的な可動限界位置のばらつきやエンジン11毎の吸入空気量のばらつきがあっても、制御基準位置VT0 における吸入空気量を一定値(基準吸入空気量)とすることができ、可変バルブタイミング装置32やエンジン11の製造ばらつきや経時変化等の影響を排除した精度の良い制御基準位置VT0 を学習することができ、可変バルブ制御による吸入空気量制御の精度を向上させることができる。
また、本実施例1では、エンジン運転条件が所定の運転条件のときに検出吸入空気量が基準吸入空気量に一致するように可変バルブタイミング装置32を制御して制御基準位置VT0 を学習するようにしたので、常に同一の運転条件で制御基準位置VT0 を学習することができ、制御基準位置VT0 を精度良く学習することができる。
しかも、本実施例1では、大気圧、吸気温、冷却水温等に基づいて検出吸入空気量を補正して、現在の環境条件で検出した検出吸入空気量を、基準環境条件における検出吸入空気量に補正するようにしたので、異なる環境条件下でも、常に基準環境条件における検出吸入空気量を用いて制御基準位置VT0 を学習することができ、環境条件の相違による誤差を排除した精度の良い制御基準位置VT0 を学習することができる。
尚、上記実施例1では、大気圧、吸気温、冷却水温等に基づいて検出吸入空気量を補正したが、検出吸入空気量の代わりに基準吸入空気量を補正するようにしても良い。
また、上記実施例1では、エアフローメータ14の出力に基づいて検出吸入空気量を算出したが、吸気管圧力センサ18の出力に基づいて検出吸入空気量を算出するようにしても良い。エンジン11の気筒内に吸入される吸入空気量に応じて吸気管圧力が変化して吸気管圧力センサ18の出力が変化するため、吸気管圧力センサ18の出力を用いれば、検出吸入空気量を精度良く算出することができる。
また、エンジン11の筒内圧力を検出する筒内圧力センサを設け、この筒内圧力センサの出力に基づいて検出吸入空気量を算出するようにしても良い。エンジン11の気筒内に吸入される吸入空気量に応じて筒内圧力が変化して筒内圧力センサの出力が変化するため、筒内圧力センサの出力を用いれば、検出吸入空気量を精度良く算出することができる。この場合、代表気筒のみに筒内圧力センサを設けるようにしても良いが、各気筒毎に筒内圧力センサを設ければ検出吸入空気量の算出精度を向上させることができる。
また、排出ガスセンサ24の出力と燃料噴射量とに基づいて検出吸入空気量を算出するようにしても良い。エンジン11の吸入空気量と燃料噴射量とに応じて空燃比が変化して排出ガスセンサ24の出力が変化するため、排出ガスセンサ24の出力と燃料噴射量とを用いれば、検出吸入空気量を精度良く算出することができる。
これらの吸入空気量の検出方法は、それぞれ単独で実施しても良いが、適宜組み合わせて実施すれば吸入空気量の検出精度を向上させることができる。
本発明の実施例2では、図6に示す可変バルブタイミング制御プログラムを実行することで、カム軸位相VTの可動範囲を複数の学習領域に区分し、各学習領域毎に制御基準位置VT0 を学習するようにしている。
図6に示す可変バルブタイミング制御プログラムでは、カム角信号とクランク角信号とに基づいてカム軸位相VTを算出した後(ステップ301、302)、ステップ303に進み、現在のカム軸位相VTに対応する学習領域の制御基準位置VT0 を読み込む。
この後、ステップ304に進み、現在のカム軸位相VTが該当する学習領域における制御基準位置VT0 であるか否かを判定する。
その結果、制御基準位置VT0 であると判定された場合には、ステップ305に進み、前述した図5に示す制御基準位置学習プログラムを実行して、該当する学習領域における制御基準位置VT0 を学習する。
その結果、制御基準位置VT0 であると判定された場合には、ステップ305に進み、前述した図5に示す制御基準位置学習プログラムを実行して、該当する学習領域における制御基準位置VT0 を学習する。
具体的には、アイドル運転中のエンジン運転条件を所定の運転条件に固定した後、検出吸入空気量が該当する学習領域における設計上の基準吸入空気量に一致するように可変バルブタイミング装置32を制御し、検出吸入空気量が基準吸入空気量に一致したときのカム軸位相VTを該当する学習領域における制御基準位置VT0 として学習する。
この後、ステップ306に進み、該当する学習領域に記憶された制御基準位置VT0 の学習値を、今回の制御基準位置VT0 の学習値で更新する。
この後、ステップ307に進み、エンジン運転状態等に応じた吸気バルブタイミングの目標進角量ΔVTtgを、該当する学習領域におけるマップ等により算出し、この目標進角量ΔVTtgを該当する学習領域における制御基準位置VT0 に加算してカム軸位相VTの目標値VTtgを算出する。
VTtg=VT0 +ΔVTtg
VTtg=VT0 +ΔVTtg
この後、ステップ308に進み、カム軸位相VTが目標値VTtgに一致するように可変バルブタイミング装置32を制御することで、該当する学習領域における制御基準位置VT0 に対する吸気バルブタイミングの実進角量ΔVTが目標進角量ΔVTtgに一致するように可変バルブタイミング装置32を制御する。
以上説明した本実施例2では、カム軸位相VTの可動範囲を複数の学習領域に区分し、各学習領域毎に制御基準位置VT0 を学習するようにしたので、可変バルブタイミング制御精度を更に向上させることができる。
尚、上記各実施例1,2では、アイドル運転状態のときに制御基準位置を学習するようにしたが、これに限定されず、安定した運転状態(例えば、燃料カット期間、定常運転状態等)のときに制御基準位置を学習するようにしても良い。
また、上記各実施例1,2では、本発明を吸気バルブのバルブタイミングを可変する可変バルブタイミング装置に適用したが、本発明は、吸気バルブのバルブリフト量やバルブ開弁期間を可変する可変バルブ装置、排気バルブのバルブ開閉特性(バルブタイミング、バルブリフト量、バルブ開弁期間のうちの少なくとも1つ)を可変する可変バルブ装置等に広く適用することができる。
また、本発明は、モータ駆動式の可変バルブ装置に限定されず、油圧駆動式の可変バルブ装置やバルブ開閉特性を変更可能な電磁駆動バルブにも適用することができる。
11…エンジン(内燃機関)、12…吸気管、14…エアフローメータ、15…スロットルバルブ、18…吸気管圧力センサ、20…燃料噴射弁、21…点火プラグ、22…排気管、24…排出ガスセンサ、25…冷却水温センサ、32…可変バルブタイミング装置、33…吸気バルブ、34…カム角センサ、35…クランク角センサ、36…ECU(吸入空気量検出手段,基準位置学習手段)
Claims (7)
- 内燃機関の吸気バルブ及び/又は排気バルブのバルブ開閉特性を可変する可変バルブ装置を制御する際の制御基準位置を学習する可変バルブ装置の基準位置学習装置において、 内燃機関の吸入空気量を検出する吸入空気量検出手段と、
前記吸入空気量検出手段で検出した検出吸入空気量が所定の基準吸入空気量に一致するときの前記可変バルブ装置の制御位置を前記制御基準位置として学習する基準位置学習手段とを備えていることを特徴とする可変バルブ装置の基準位置学習装置。 - 前記基準位置学習手段は、内燃機関が所定の運転条件のときに前記検出吸入空気量が前記基準吸入空気量に一致するように前記可変バルブ装置を制御して前記制御基準位置を学習することを特徴とする請求項1に記載の可変バルブ装置の基準位置学習装置。
- 前記吸入空気量検出手段は、内燃機関の吸気管内の空気流量を検出するエアフローメータの出力に基づいて前記検出吸入空気量を算出することを特徴とする請求項1又は2に記載の可変バルブ装置の基準位置学習装置。
- 前記吸入空気量検出手段は、内燃機関の吸気管圧力を検出する吸気管圧力センサの出力に基づいて前記検出吸入空気量を算出することを特徴とする請求項1乃至3のいずれかに記載の可変バルブ装置の基準位置学習装置。
- 前記吸入空気量検出手段は、内燃機関の筒内圧力を検出する筒内圧力センサの出力に基づいて前記検出吸入空気量を算出することを特徴とする請求項1乃至4のいずれかに記載の可変バルブ装置の基準位置学習装置。
- 前記吸入空気量検出手段は、内燃機関の排出ガスの空燃比又は酸素濃度を検出する排出ガスセンサの出力と燃料噴射量とに基づいて前記検出吸入空気量を算出することを特徴とする請求項1乃至5のいずれかに記載の可変バルブ装置の基準位置学習装置。
- 前記吸入空気量検出手段は、大気圧、吸気温、冷却水温のうちの少なくとも1つに基づいて前記検出吸入空気量を補正することを特徴とする請求項1乃至6のいずれかに記載の可変バルブ装置の基準位置学習装置。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2004109632A JP2005291141A (ja) | 2004-04-02 | 2004-04-02 | 可変バルブ装置の基準位置学習装置 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2004109632A JP2005291141A (ja) | 2004-04-02 | 2004-04-02 | 可変バルブ装置の基準位置学習装置 |
Publications (1)
| Publication Number | Publication Date |
|---|---|
| JP2005291141A true JP2005291141A (ja) | 2005-10-20 |
Family
ID=35324348
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2004109632A Pending JP2005291141A (ja) | 2004-04-02 | 2004-04-02 | 可変バルブ装置の基準位置学習装置 |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP2005291141A (ja) |
Cited By (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2007162649A (ja) * | 2005-12-16 | 2007-06-28 | Toyota Motor Corp | ハイブリット車両の内燃機関制御装置、及びcvt車両の内燃機関制御装置 |
| US7403849B1 (en) * | 2007-02-02 | 2008-07-22 | Mitsubishi Electric Corporation | Control apparatus for an internal combustion engine |
| DE102008031503A1 (de) | 2007-07-06 | 2009-01-08 | Hitachi, Ltd. | Vorrichtung und Verfahren zum Erfassen der Nockenphase in einem Motor |
| CN112395733A (zh) * | 2019-08-15 | 2021-02-23 | 大众汽车股份公司 | 用于修改检测到的凸轮轴位置的方法、控制器、内燃机和车辆 |
Citations (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH1150889A (ja) * | 1997-08-04 | 1999-02-23 | Nissan Motor Co Ltd | エンジンの制御装置 |
| JPH11166447A (ja) * | 1997-12-03 | 1999-06-22 | Nippon Soken Inc | 内燃機関の吸気量検出装置 |
| JP2000356143A (ja) * | 1999-06-14 | 2000-12-26 | Toyota Motor Corp | 内燃機関の燃焼制御装置 |
| JP2003097340A (ja) * | 2001-09-27 | 2003-04-03 | Aisan Ind Co Ltd | 内燃機関の吸気圧検出方法 |
| JP2003148177A (ja) * | 2001-11-13 | 2003-05-21 | Hitachi Unisia Automotive Ltd | 可変動弁機構の制御装置 |
-
2004
- 2004-04-02 JP JP2004109632A patent/JP2005291141A/ja active Pending
Patent Citations (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH1150889A (ja) * | 1997-08-04 | 1999-02-23 | Nissan Motor Co Ltd | エンジンの制御装置 |
| JPH11166447A (ja) * | 1997-12-03 | 1999-06-22 | Nippon Soken Inc | 内燃機関の吸気量検出装置 |
| JP2000356143A (ja) * | 1999-06-14 | 2000-12-26 | Toyota Motor Corp | 内燃機関の燃焼制御装置 |
| JP2003097340A (ja) * | 2001-09-27 | 2003-04-03 | Aisan Ind Co Ltd | 内燃機関の吸気圧検出方法 |
| JP2003148177A (ja) * | 2001-11-13 | 2003-05-21 | Hitachi Unisia Automotive Ltd | 可変動弁機構の制御装置 |
Cited By (10)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2007162649A (ja) * | 2005-12-16 | 2007-06-28 | Toyota Motor Corp | ハイブリット車両の内燃機関制御装置、及びcvt車両の内燃機関制御装置 |
| US7403849B1 (en) * | 2007-02-02 | 2008-07-22 | Mitsubishi Electric Corporation | Control apparatus for an internal combustion engine |
| DE102008031503A1 (de) | 2007-07-06 | 2009-01-08 | Hitachi, Ltd. | Vorrichtung und Verfahren zum Erfassen der Nockenphase in einem Motor |
| US7966869B2 (en) | 2007-07-06 | 2011-06-28 | Hitachi, Ltd. | Apparatus and method for detecting cam phase of engine |
| US8302466B2 (en) | 2007-07-06 | 2012-11-06 | Hitachi, Ltd. | Apparatus and method for detecting cam phase of engine |
| DE102008031503B4 (de) * | 2007-07-06 | 2016-10-20 | Hitachi, Ltd. | Vorrichtung und Verfahren zum Erfassen der Nockenphase in einem Motor |
| CN112395733A (zh) * | 2019-08-15 | 2021-02-23 | 大众汽车股份公司 | 用于修改检测到的凸轮轴位置的方法、控制器、内燃机和车辆 |
| KR20210020810A (ko) * | 2019-08-15 | 2021-02-24 | 폭스바겐 악티엔 게젤샤프트 | 검출된 캠 샤프트 위치를 조정하기 위한 방법, 이 방법을 실행하기 위한 제어 유닛, 내연 기관 및 차량 |
| KR102321218B1 (ko) | 2019-08-15 | 2021-11-03 | 폭스바겐 악티엔 게젤샤프트 | 검출된 캠 샤프트 위치를 조정하기 위한 방법, 이 방법을 실행하기 위한 제어 유닛, 내연 기관 및 차량 |
| CN112395733B (zh) * | 2019-08-15 | 2024-05-31 | 大众汽车股份公司 | 用于修改检测到的凸轮轴位置的方法、控制器、内燃机和车辆 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| US8180552B2 (en) | Variable valve timing apparatus and control method thereof | |
| JP4075846B2 (ja) | 多気筒内燃機関の可変動弁装置 | |
| JP4196294B2 (ja) | 内燃機関の可変バルブタイミング制御装置 | |
| JP2009257186A (ja) | 可変バルブタイミング装置の制御装置 | |
| JP4123127B2 (ja) | 内燃機関の可変バルブタイミング制御装置 | |
| JP2000328969A (ja) | 内燃機関のバルブタイミング制御装置 | |
| JP4766074B2 (ja) | 内燃機関の燃料噴射制御装置 | |
| JP2006170075A (ja) | 内燃機関の可変バルブ制御装置 | |
| JP4815407B2 (ja) | 内燃機関の運転制御装置 | |
| JP5660322B2 (ja) | 内燃機関のegr制御装置 | |
| JP4314585B2 (ja) | 内燃機関の制御装置 | |
| US6463912B1 (en) | Intake air volume detection device for internal combustion engine | |
| JP2005291141A (ja) | 可変バルブ装置の基準位置学習装置 | |
| JP2006112385A (ja) | 内燃機関の可変バルブタイミング制御装置 | |
| JP4404354B2 (ja) | 内燃機関の制御装置 | |
| JP5490646B2 (ja) | 内燃機関の可変バルブタイミング制御装置 | |
| JP4666372B2 (ja) | 可変動弁機構の制御装置 | |
| JP2014238027A (ja) | 内燃機関における可変機構の駆動制御装置 | |
| JP4103821B2 (ja) | 内燃機関の吸気制御装置 | |
| CN108457759B (zh) | 内燃机长期学习值控制 | |
| JP3701519B2 (ja) | エンジン制御装置 | |
| JP2008138579A (ja) | 内燃機関の可変バルブタイミング制御装置 | |
| JP4400402B2 (ja) | 内燃機関の制御装置 | |
| JP4073563B2 (ja) | 内燃機関の制御装置 | |
| JP2006170041A (ja) | 内燃機関の燃料噴射制御装置 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20060627 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20070928 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20071002 |
|
| A02 | Decision of refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A02 Effective date: 20080215 |