JP2005237978A - 撮影装置、撮影システム、撮影制御方法、記憶媒体 - Google Patents
撮影装置、撮影システム、撮影制御方法、記憶媒体 Download PDFInfo
- Publication number
- JP2005237978A JP2005237978A JP2005089359A JP2005089359A JP2005237978A JP 2005237978 A JP2005237978 A JP 2005237978A JP 2005089359 A JP2005089359 A JP 2005089359A JP 2005089359 A JP2005089359 A JP 2005089359A JP 2005237978 A JP2005237978 A JP 2005237978A
- Authority
- JP
- Japan
- Prior art keywords
- grid
- radiation
- irradiation
- imaging
- time
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Pending
Links
- 238000000034 method Methods 0.000 title claims description 30
- 230000005855 radiation Effects 0.000 claims abstract description 151
- 238000003384 imaging method Methods 0.000 claims description 95
- 238000003860 storage Methods 0.000 claims description 19
- 238000001514 detection method Methods 0.000 claims description 18
- 238000009825 accumulation Methods 0.000 claims description 12
- 238000006243 chemical reaction Methods 0.000 claims description 5
- 238000003745 diagnosis Methods 0.000 abstract description 7
- 230000002542 deteriorative effect Effects 0.000 abstract 1
- 230000006870 function Effects 0.000 description 13
- 238000002601 radiography Methods 0.000 description 11
- OAICVXFJPJFONN-UHFFFAOYSA-N Phosphorus Chemical compound [P] OAICVXFJPJFONN-UHFFFAOYSA-N 0.000 description 8
- 210000000481 breast Anatomy 0.000 description 7
- 230000008054 signal transmission Effects 0.000 description 4
- 230000006866 deterioration Effects 0.000 description 3
- 238000009826 distribution Methods 0.000 description 3
- 239000000463 material Substances 0.000 description 3
- 229910021417 amorphous silicon Inorganic materials 0.000 description 2
- 230000005540 biological transmission Effects 0.000 description 2
- 238000010586 diagram Methods 0.000 description 2
- 230000005284 excitation Effects 0.000 description 2
- 239000011888 foil Substances 0.000 description 2
- 238000005259 measurement Methods 0.000 description 2
- 238000003825 pressing Methods 0.000 description 2
- GGCZERPQGJTIQP-UHFFFAOYSA-N sodium;9,10-dioxoanthracene-2-sulfonic acid Chemical compound [Na+].C1=CC=C2C(=O)C3=CC(S(=O)(=O)O)=CC=C3C(=O)C2=C1 GGCZERPQGJTIQP-UHFFFAOYSA-N 0.000 description 2
- XAGFODPZIPBFFR-UHFFFAOYSA-N aluminium Chemical compound [Al] XAGFODPZIPBFFR-UHFFFAOYSA-N 0.000 description 1
- 229910052782 aluminium Inorganic materials 0.000 description 1
- 239000003990 capacitor Substances 0.000 description 1
- 210000000038 chest Anatomy 0.000 description 1
- 230000000694 effects Effects 0.000 description 1
- 230000005288 electromagnetic effect Effects 0.000 description 1
- 238000005516 engineering process Methods 0.000 description 1
- 238000007689 inspection Methods 0.000 description 1
- 230000001678 irradiating effect Effects 0.000 description 1
- 238000004519 manufacturing process Methods 0.000 description 1
- 230000003287 optical effect Effects 0.000 description 1
- 230000035945 sensitivity Effects 0.000 description 1
- 230000001235 sensitizing effect Effects 0.000 description 1
- 230000003595 spectral effect Effects 0.000 description 1
- 239000000126 substance Substances 0.000 description 1
Images





Abstract
【解決手段】 制御手段111は、被写体102を透過した放射線を移動可能なグリッド104を介して撮像素子106で受光して、撮像素子106の蓄積信号を読み出す際の動作制御として、被写体102に対する放射線照射終了後に、グリッド104の移動駆動を停止させ、当該移動駆動の停止後に、106撮像素子の蓄積信号の読み出しを開始させる。
【選択図】 図4
Description
このようにして得られたフィルム画像(放射線画像)は、所謂アナログ写真であり、医療診断や検査等に使用される。
ここで、“間接”と称した理由は、上述したようなアナログ写真等のアナログ的な放射線画像を取得する装置(以下、「アナログ撮影装置」と言う)と同様に、即時に放射線画像を表示することができないためである。
このような放射線撮影装置は、取得した放射線画像データを即時に表示することが可能であるため、直接ディジタル撮影装置とされている。
また、直接ディジタル撮影装置の間接ディジタル撮影装置に対する利点としては、即時性が挙げられる。例えば、撮影して得られた放射線画像を、その場で瞬時に表示できるため、急を要する医療現場においては有効である。
このような構成により、被検者に対する放射線照射で発生した当該被検者内の散乱線のような照射軸より角度のある放射線が、検出器に到達する以前にグリッド内の鉛箔に吸収されるため、コントラストの高い放射線画像を得ることができる。
また、センサでの信号読出時において、その近傍で、グリッド移動のためのモータ駆動が行われると、電磁ノイズの影響により、信号電位や制御電源電位が変動されてしまい、放射線画像に対してノイズが重畳されてしまう。
したがって、ノイズが重畳されてしまった放射線画像では、例えば、医療診断能を低下させるおそれがある。
また、グリッドの停止から、一定の待機時間を設けるように構成した場合、グリッドの移動による撮影素子の振動の影響を軽減させた後に、撮像素子からの信号読出を開始されるため、より高画質な撮影画像を得ることができる。
したがって、グリッド移動に起因する電磁ノイズの影響による撮影画像の画質劣化を防ぐことができ、また、グリッド移動に起因する撮像素子の振動の影響による撮影画像の画質劣化を防ぐことができる。
例えば、本発明を放射線撮影に適用すれば、ノイズのない良好な放射線画像を提供できるため、画像診断における誤診断等を確実に防ぐことができる。
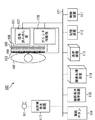
本発明は、例えば、図1に示すような放射線撮影システム100に適用される。
放射線撮影システム100は、上記図1に示すように、被写体(被検者)102の撮影画像信号を取得する撮影装置110と、本システム100全体の動作制御を司る制御装置111と、制御装置111での制御処理のための処理プログラムや撮影画像等の各種データを記憶する記憶装置112と、撮影画像等を表示する表示装置113と、撮影装置110にて得られた被写体102の撮影画像信号に対して任意の画像処理を施す画像処理装置114と、撮影装置110での各種撮影条件を指示するための撮影条件指示装置115と、本システム100に対して撮影動作開始を指示するための撮影ボタン116と、被検者102に対して放射線(X線等)を放射線管球101から発生する放射線発生装置117とが、システムバス120を介して互いにデータ授受可能に接続された構成としている。
胸当て部103、グリッド104、蛍光体105、及びセンサ106は、この順で放射線発生装置117の放射線管球101に近い方から配置されている。
ここでは、放射線撮影システム100での撮影手順及び放射線画像の生成のプロセスについての概要を説明する。
尚、本実施の形態では、撮影条件の入力を、撮影条件指示装置115によるユーザからの手入力としているが、これに限られることはなく、撮影条件を、例えば、撮影装置110に結線されたネートワーク(図示せず)を介して入力するようにしてもよい。
制御装置111は、ユーザからの撮影動作開始要求を受諾後、本システム100において必要な初期化を行い、放射線発生装置117に対して放射線の照射を促す。
放射線管球101から発生された放射線は、被検者102を透過して胸当て部103へと到達する。
さらに、胸当て部103は放射線に対し十分に透過である構成により、胸当て部103を透過した放射線は、グリッド104へと到達する。
蛍光体105は、グリッド104からの放射線(有効放射線)をセンサ106の分光感度に合わせるように可視光化する。
信号読出部107は、センサ106での蓄積画像信号を読み出して、これを放射線画像信号として記憶装置112へ記憶させる。
表示装置113は、画像処理装置114での処理後の放射線画像信号を表示する。
図2は、制御装置111が実行する本システム100の動作制御処理を示したものであり、図3は、当該動作制御のタイミングを示したものである。
尚、上記図2に示す処理は、上述したユーザによる撮影条件の入力から、センサ106での画像信号の読み出しまでの処理である。
制御装置111は、撮影条件指示装置115にてユーザから選択入力するされた撮影条件により、照射時間Texpと、撮影に使用するセンサ106の種類と、放射線管球101の種類とを認識する。
そして、制御装置111は、上記認識情報から、放射線照射までの制御及び放射線照射後の制御を、次のステップS202からの処理によって決定する。
制御装置111は、センサ106の種類により、センサ初期化時間Tssを決定する。
センサ初期化時間Tssは、センサ106の種類によって異なるが、センサ106が、例えば、暗電流の事前吐き出しを必要とするセンサである場合、空読時間がセンサ初期化時間Tssとなり、この時間から、センサ106での信号蓄積が始まることとなる。
制御装置111は、照射時間Texpから、グリッド初期化時間Tgsと、グリッド振動収束時間Tgeとを決定する。
したがって、上記の最適なグリッド104の移動速度(目標とする移動速度)、及びグリッド104の位置が放射線の照射中心位置(目標とする位置)に到達する時間が、グリッド初期化時間Tgsである。
制御装置111は、放射線管球101の種類により、プリ照射ディレイ時間Txsと、ポスト照射ディレイ時間Txeとを決定する。
本実施の形態では、例えば、放射線発生装置117や放射線管球101の様々な種類に対応したプリ照射ディレイ時間Txsを、テーブル化して予め用意しておき、このテーブル化情報から、該当するプリ照射ディレイ時間Txsを決定する。
制御装置111は、照射ディレイ時間T1を決定する。
照射ディレイ時間T1とは、撮影ボタン116によりユーザから撮影要求がなされてから、放射線発生装置117により実際に放射線が照射されるまでのディレイ時間であり、ステップS202にて決定されたセンサ初期化時間Tss、ステップS203にて決定されたグリッド初期化時間Tgs、及びステップS204にて決定されたプリ照射ディレイ時間Txsのうちの最長の時間が、照射ディレイ時間T1として決定される。
制御装置111は、照射までのタイムテーブルを決定する。
このタイムテーブルは、ステップS202にて決定されたセンサ初期化時間Tss、ステップS203にて決定されたグリッド初期化時間Tgs、及びステップS204にて決定されたプリ照射ディレイ時間Txsから決定される。
すなわち、センサ106の初期化のタイミングを“T1−Tss”として決定し、グリッド104の駆動開始のタイミングを““T1−Tgs”として決定し、放射線発生装置117に対する放射線照射指示(照射許可)のタイミングを“T1−Txs”として決定する。
制御装置111は、上述のようにして放射線照射前の制御を決定し終えた後、撮影ボタン116によりユーザから撮影要求なされたか否かを判別し、当該撮影要求がなされるまで待機状態となる。
制御装置111は、撮影ボタン116によりユーザから撮影要求なされたことを認識すると、ステップS206にて決定したタイムテーブルに従った動作制御を実行する。
これにより、センサ106の初期化開始が“T1−Tss”経過後に実行され、グリッド104の駆動開始が“T1−Tgs”経過後に実行され、照射許可が“T1−Txs”経過後に実行される。
制御装置111は、ステップS201にて決定した照射時間(実曝射時間)Texpと、ステップS204にて決定したポスト照射ディレイ時間Txeと、ステップS205にて決定した照射ディレイ時間T1との合計時間(T1+Texp+Txe)が経過するまで待機状態となる。
制御装置111は、“T1+Texp+Txe”時間が経過したことを認識すると、グリッド移動部108を介してグリッド104の駆動を停止させる。
制御装置111は、ステップS203にて決定したグリッド振動収束時間Tgeが経過するまで待機状態となる。
制御装置111は、グリッド振動収束時間Tgeが経過したことを認識すると、信号読出部107を介してセンサ106の蓄積信号の読み出しを開始させる。
また、グリッド104の駆動を停止するように構成しているため、グリッド移動部108から発生する電磁ノイズの影響を防ぐことができる。
また、グリッド104の駆動停止後、さらにグリッド振動収束時間Tge待機状態とする構成としているため、装置振動による影響を防ぐことができる。
したがって、ユーザからの撮影要求を認識後に、制御装置111が上記図2のフローチャートに従って本システム100の動作制御を行うことで、良好な撮影画像を取得することができる。
尚、上記図3のタイミングチャートは、撮影ボタン116が押下されたときからのタイミングを説明している。
照射時間Texp=100ms
センサ初期化時間Tss=200ms
グリッド初期化時間Tgs=300ms
プリ照射ディレイ時間Txs=100ms
グリッド振動収束時間Tge=300ms
ポスト照射ディレイ時間Txe=100ms
を決定する。
この場合、照射ディレイ時間T1は、センサ初期化時間Tss、グリッド初期化時間Tgs、プリ照射ディレイ時間Txsのうちの最長の時間であることにより、
T1=max(Tss,Tgs,Txs)=Tgs=300ms
と決定する。
放射線照射までの動作制御については、これらの初期条件から決定される。
センサ初期化タイミング :T1−Tss=100ms
グリッド移動開始タイミング:T1−Tgs=0ms
照射許可信号送信タイミング:T1−Txs=200ms
となる。
すなわち、グリッド制御停止タイミング及び信号読出開始タイミングを、
グリッド制御停止タイミング:T1+Texp+Txe=500ms
信号読出開始タイミング:T1+Texp+Txe+Tge=800ms
と決定する。
撮影要求を認識すると、上記の決定した各制御タイミングに基づいて、放射線撮影システム100の動作制御が開始される。
グリッド104の移動速度は、上記図3(c)に示すように、加速的に上昇し、300ms(グリッド初期化時間Tgs=300ms)経過後に、照射可能状態に到達する。
これにより、放射線発生装置117では、上記図3(e)に示すように、100ms(プリ照射ディレイ時間Txs=100ms)後に、実照射が開始される。
このとき、上記図3(b)に示すように、グリッド104の移動制御を停止する。これにより、グリッド104の移動速度は徐々に減速していく。これに伴って、グリッド104を動かすことで発生した撮影装置110の振動が収束し始める。
このとき、撮影装置110の振動は、画質に影響しないほど低減されており、この結果、良好な撮影画像を取得することができる。
本発明は、例えば、図4に示すような放射線撮影システム300に適用される。
この放射線撮影システム300は、上記図1の放射線撮影システム100と同様の構成としているが、撮影装置110内に対して、放射線照射状態を検出する放射線検出器302と、グリッド104の振動状態を計測する振動計測器301とをさらに備えた構成としている。
制御装置111は、撮影条件指示装置115にてユーザから選択入力するされた撮影条件により、照射時間Texpと、撮影に使用するセンサ106の種類と、放射線管球101の種類とを認識する。
そして、制御装置111は、上記認識情報から、放射線照射までの制御及び放射線照射後の制御を、次のステップS202からの処理によって決定する。
制御装置111は、センサ106の種類により、センサ初期化時間Tssを決定する。
制御装置111は、照射時間Texpから、グリッド初期化時間Tgs(グリッド104の目標の移動速度及び位置に到達する時間)を決定する。
制御装置111は、放射線管球101の種類により、プリ照射ディレイ時間Txs(放射線発生装置117に対して放射線の照射許可を指示してから、実際に放射線発生装置117で放射線の照射が始まるまでの時間)を決定する。
制御装置111は、照射ディレイ時間T1(センサ初期化時間Tss、グリッド初期化時間Tgs、及びプリ照射ディレイ時間Txsのうちの最長の時間)を決定する。
制御装置111は、照射までのタイムテーブルとして、センサ106の初期化のタイミングを“T1−Tss”、グリッド104の駆動開始のタイミングを““T1−Tgs”、放射線発生装置117に対する放射線照射指示(照射許可)のタイミングを“T1−Txs”をそれぞれ決定する。
制御装置111は、上述のようにして放射線照射前の制御を決定し終えた後、撮影ボタン116によりユーザから撮影要求なされたか否かを判別し、当該撮影要求がなされるまで待機状態となる。
制御装置111は、撮影ボタン116によりユーザから撮影要求なされたことを認識すると、ステップS206にて決定したタイムテーブルに従った動作制御を実行する。
これにより、センサ106の初期化開始が“T1−Tss”経過後に実行され、グリッド104の駆動開始が“T1−Tgs”経過後に実行され、照射許可が“T1−Txs”経過後に実行される。
制御装置111は、放射線検出器302から出力される検出信号により、放射線発生器117による放射線照射が終了したか否かを判別する。
制御装置111は、放射線発生器117による放射線照射が終了したことを認識すると、グリッド移動部108を介してグリッド104の駆動を停止させる。
制御装置111は、振動計測器301での計測結果により、グリッド104の振動が収束したか否かを判別する。
制御装置111は、グリッド104の振動が収束したことを認識すると、信号読出部107を介してセンサ106の蓄積信号の読み出しを開始させる。
また、グリッド104の駆動停止後、振動計測器301での計測結果に基づいて、グリッド104の振動が収束するまで待機状態とする構成としているため、装置振動による影響を防ぐことができる。
したがって、ユーザからの撮影要求を認識後に、制御装置111が上記図5のフローチャートに従って本システム100の動作制御を行うことで、良好な撮影画像を取得することができる。
尚、上記図6のタイミングチャートは、撮影ボタン116が押下されたときからのタイミングを説明している。
照射時間Texp=100ms
センサ初期化時間Tss=200ms
グリッド初期化時間Tgs=300ms
プリ照射ディレイ時間Txs=100ms
を決定する。
この場合、照射ディレイ時間T1は、センサ初期化時間Tss、グリッド初期化時間Tgs、プリ照射ディレイ時間Txsのうちの最長の時間であることにより、
T1=max(Tss,Tgs,Txs)=Tgs=300ms
と決定する。
放射線照射までの動作制御については、これらの初期条件から決定される。
センサ初期化タイミング :T1−Tss=100ms
グリッド移動開始タイミング:T1−Tgs=0ms
照射許可信号送信タイミング:T1−Txs=200ms
となる。
撮影要求を認識すると、上記の決定した各制御タイミングに基づいて、放射線撮影システム100の動作制御が開始される。
グリッド104の移動速度は、上記図6(c)に示すように、加速的に上昇し、300ms(グリッド初期化時間Tgs=300ms)経過後に、照射可能状態に到達する。
これにより、放射線発生装置117では、上記図6(e)に示すように、100ms(プリ照射ディレイ時間Txs=100ms)後に、実照射が開始される。これと同時に、上記図6(f)に示すように、放射線照射を示す放射線検知信号をHighレベルとする。
そして、上記図6(h)に示すように、信号読出部107に対して、センサ106での信号蓄積を終了し、当該信号読み出しを開始する旨の指示を行う。
このとき、撮影装置110の振動は、画質に影響しないほど低減されており、この結果、良好な撮影画像を取得することができる。
プログラムコードを供給するための記憶媒体としては、ROM、フレキシブルディスク、ハードディスク、光ディスク、光磁気ディスク、CD−ROM、CD−R、磁気テープ、不揮発性のメモリカード等を用いることができる。
101 放射線管球
102 被検者
103 胸当て部
104 グリッド
105 蛍光体
106 センサ(2次元撮像素子)
107 信号読出部
108 グリッド移動部
110 撮影装置
111 制御装置
112 記憶装置
113 表示装置
114 画像処理装置
115 撮影条件指示装置
116 撮影ボタン
117 放射線発生装置
120 システムバス
Claims (15)
- 移動可能なグリッドを介した被写体光を撮像素子で受光して、当該撮像素子での光電変換による蓄積信号を撮影画像信号として読み出す機能を有する撮影装置であって、
上記グリッドの移動駆動を停止させ、当該移動駆動の停止後に、上記撮像素子の蓄積信号の読み出しを開始させる制御手段を備えることを特徴とする撮影装置。 - 上記被写体に対する照射を検出する照射検出手段を備え、
上記制御手段は、上記照射検出手段の検出結果に基づいて、上記グリッドの移動駆動停止の制御を行うことを特徴とする請求項1記載の撮影装置。 - 上記制御手段は、上記グリッドの移動駆動の停止後、所定の時間経過後に、上記撮像素子の蓄積信号の読み出しを開始させることを特徴とする請求項1記載の撮影装置。
- 上記制御手段は、上記所定の時間を、上記被写体に対する照射時間、及び上記グリッドの移動速度の少なくとも何れかに基づき予め決定することを特徴とする請求項3記載の撮影装置。
- 上記グリッドの移動による上記撮像素子の振動状態を検出する振動検出手段を備え、
上記制御手段は、上記振動検出手段の検出結果に基づいて、上記撮像素子の蓄積信号の読出開始の制御を行うことを特徴とする請求項1記載の撮影装置。 - 上記被写体に対する照射は、放射線照射を含むことを特徴とする請求項1記載の撮影装置。
- 複数の機器が互いに通信可能に接続されてなる撮影システムであって、
上記複数の機器のうち少なくとも1つの機器は、請求項1〜6の何れか1項に記載の撮影装置の機能を有することを特徴とする撮影システム。 - 被写体を透過した放射線を移動可能なグリッドを介して撮像素子で受光し、当該撮像素子の蓄積信号を読み出す処理ステップを含む撮影制御方法であって、
上記処理ステップは、上記グリッドの移動駆動を停止し、当該移動駆動の停止後に、上記撮像素子の蓄積信号の読み出しを開始するステップを含むことを特徴とする撮影制御方法。 - 上記処理ステップは、
上記放射線の照射期間を認識するステップと、
上記照射期間の認識に基づいて、上記グリッドの移動駆動を停止するステップを含むことを特徴とする請求項8記載の撮影制御方法。 - 上記処理ステップは、上記グリッドの移動駆動の停止後、予め決定した適性待機時間を経て、上記撮像素子の蓄積信号の読み出しを開始するステップを含むことを特徴とする請求項8記載の撮影制御方法。
- 上記処理ステップは、上記適性待機時間を、上記放射線の照射時間、及び上記グリッドの移動速度の少なくとも何れかに応じて決定するステップを含むことを特徴とする請求項10記載の撮影制御方法。
- 上記処理ステップは、
上記撮像素子の振動の収束を検出するステップと、
上記振動収束の検出に基づいて、上記撮像素子の蓄積信号の読み出しを開始するステップを含むことを特徴とする請求項8記載の撮影制御方法。 - 上記放射線は、X線を含むことを特徴とする請求項8記載の撮影制御方法。
- 請求項1〜6の何れか1項に記載の撮影装置の機能、又は請求項7記載の撮影システムの機能をコンピュータに実現させるための処理プログラムを、コンピュータが読出可能に格納したことを特徴とする記憶媒体。
- 請求項8〜13の何れか1項に記載の撮影制御方法をコンピュータに実行させるための処理プログラムを、コンピュータが読出可能に格納したことを特徴とする記憶媒体。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2005089359A JP2005237978A (ja) | 2005-03-25 | 2005-03-25 | 撮影装置、撮影システム、撮影制御方法、記憶媒体 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2005089359A JP2005237978A (ja) | 2005-03-25 | 2005-03-25 | 撮影装置、撮影システム、撮影制御方法、記憶媒体 |
Related Parent Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2000096463A Division JP3740347B2 (ja) | 2000-03-31 | 2000-03-31 | 撮影装置、撮影システム、及び撮影方法 |
Related Child Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2007047730A Division JP4174544B2 (ja) | 2007-02-27 | 2007-02-27 | 撮影装置、及び撮影方法 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2005237978A true JP2005237978A (ja) | 2005-09-08 |
| JP2005237978A5 JP2005237978A5 (ja) | 2007-04-12 |
Family
ID=35020279
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2005089359A Pending JP2005237978A (ja) | 2005-03-25 | 2005-03-25 | 撮影装置、撮影システム、撮影制御方法、記憶媒体 |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP2005237978A (ja) |
Cited By (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2010034661A (ja) * | 2008-07-25 | 2010-02-12 | Shimadzu Corp | 撮像装置 |
| JP2014223557A (ja) * | 2009-12-28 | 2014-12-04 | 富士フイルム株式会社 | 放射線画像撮影システム |
-
2005
- 2005-03-25 JP JP2005089359A patent/JP2005237978A/ja active Pending
Cited By (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2010034661A (ja) * | 2008-07-25 | 2010-02-12 | Shimadzu Corp | 撮像装置 |
| JP2014223557A (ja) * | 2009-12-28 | 2014-12-04 | 富士フイルム株式会社 | 放射線画像撮影システム |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP5460103B2 (ja) | 放射線撮影装置及びその暗電流補正方法 | |
| JP4557357B2 (ja) | 撮影制御装置、撮影制御方法及び記憶媒体 | |
| JP4731698B2 (ja) | 画像処理装置、撮影装置、画像処理システム、画像処理方法、及び記憶媒体 | |
| JPH11155847A (ja) | 放射線撮影装置及び駆動方法 | |
| JP5124363B2 (ja) | エネルギーサブトラクション処理装置、方法、およびプログラム | |
| JP5203946B2 (ja) | 自動露光制御のための方法および装置 | |
| JP2002336232A (ja) | 位相コントラスト画像生成方法および装置並びにプログラム | |
| JP2000083951A (ja) | X線画像撮影装置及びグリッド装置 | |
| JP2009268827A (ja) | 放射線画像撮影装置及びその駆動方法 | |
| JP2010094209A (ja) | 放射線画像撮影装置 | |
| JP6902979B2 (ja) | 画像処理装置、制御装置、画像処理方法、及び画像処理プログラム | |
| JP4174544B2 (ja) | 撮影装置、及び撮影方法 | |
| JP2000079110A (ja) | 画像処理装置 | |
| JP2005237978A (ja) | 撮影装置、撮影システム、撮影制御方法、記憶媒体 | |
| JP3740347B2 (ja) | 撮影装置、撮影システム、及び撮影方法 | |
| JP4731704B2 (ja) | 医療用撮影システム及び撮影表示方法 | |
| JP2005028114A (ja) | 放射線撮影装置及び放射線撮影方法 | |
| JP2015195832A (ja) | 制御装置、制御方法及びプログラム | |
| JP2008125691A (ja) | 放射線画像演算方法および装置並びにプログラム | |
| JP2004248945A (ja) | 画像処理装置、画像処理方法、プログラム及び記憶媒体 | |
| JP2008086358A (ja) | 放射線画像撮像装置、放射線源制御装置及びその制御方法、並びに、測定位置特定装置 | |
| JP2001149359A (ja) | 撮像装置、画像処理装置、画像処理システム、画像処理方法、及び記憶媒体 | |
| JP2006255216A (ja) | X線画像診断装置 | |
| JP2002072386A (ja) | 放射線画像撮影装置および放射線画像読み取り装置ならびに放射線画像情報記録媒体 | |
| JP2004337197A (ja) | X線画像撮影装置 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20070227 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20071218 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20080218 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A132 Effective date: 20080408 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20080603 |
|
| A02 | Decision of refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A02 Effective date: 20080729 |